Пристрій для стабілізації співвідношення натягу рухаючогося матеріалу в зонах багаторухової технологічної лінії
Номер патенту: 11500
Опубліковано: 25.12.1996
Автори: Аркушин Василь Прокопович, Радченко Олексій Леонідович
Формула / Реферат
Устройство для стабилизации соотношения натяжения движущегося материала в зонах многодвигательной технологической линии, содержащее регуляторы скорости приводов транспортирующих валиков, датчики натяжения, установленные в зонах технологической линии и связанные с первыми входами соответствующих блоков сравнения, блоки управления приводами, сумматоры и задатчик натяжения, отличающееся тем, что, с целью повышения степени стабилизации соотношения натяжения, оно имеет для каждого привода, начиная с третьего по ходу движения материала сумматоры-преобразователи, причем вход регулятора скорости второго привода соединен с выходом первого блока управления приводом, а входы регуляторов скорости приводов, начиная с третьего, связаны с выходами соответствующих сумматоров, первые входы которых соединены с выходами соответствующих первых блоков управления приводами, а вторые входы через вторые блоки управления приводами связаны с выходами сумматоров-преобразователей, при этом выход задатчика натяжения соединен с вторыми входами блоков сравнения, выходы которых связаны с входами соответствующих первых блоков управления приводами и с входами сумматоров-преобразователей, относящихся к последующим приводам.
Текст
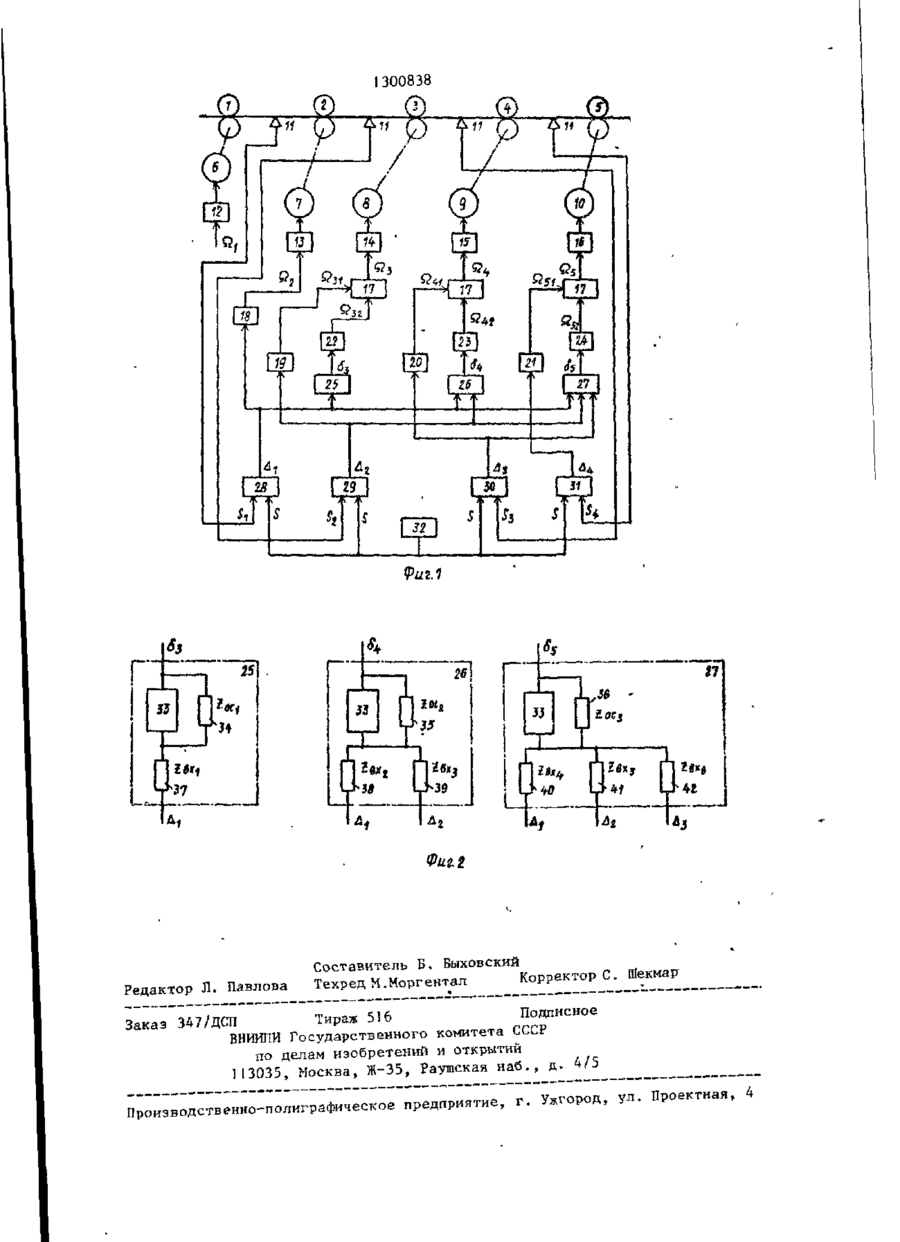
J . ДЛЯ СЛУЖЕБНОГО ПОЛЬЗОВАНИЯ ЭКЗ СОЮЗ СОВЕТСНИХ СОЦИАЛИСТИЧЕСКИХ РЕСПУБЛИН С 1 4 В 65 Н 77/00 5) ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССР ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИЙ ОПИСАНИЕ ИЗОБР (21) 3919429/28-12 (22) 12.05.85 (71) Украинский научно-исследовательский и конструкторский институт по разработке машин и оборудования для переработки пластических масс, резины и искусственной кожи (72) В.П. Аркушин и А,Л. Радченко (53) 677.057.1(088.8) (56) Авторское свидетельство СССР № 1062159, кл. В 65 Н 77/00, 1982. (54) УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ СООТНОШЕНИЯ НАТЯЖЕНИЯ ДВИЖУЩЕГОСЯ МАТЕРИАЛА В ЗОНАХ МНОГОДВИГАТЕЛЬНОЙ ТЕХНОЛОГИЧЕСКОЙ ЛИНИИ (57 ) Изобретение относится к устройствам для стабилизации соотношения натяжения движущегося материала в зонах многодвигательной технологической ЛИНРЯЇ. Цель изобретения - повышение степени стабилизации соотношения натяжения. Независимо регулируемый сигнал Я.і посредством регулятора 12 скорости подается на привод 6, чем задается скорость транспортирования материала в зонах технологической линии. Электрические сигналы обратной связи S,, S , S , S^, соответствующие текущим величинам натяжений движущегося материала в зонах технологической линии, поступают на входы блоков 28,29,20,31 сравнения и вычитаются в них из сигнала S, соответствующего задаваемому значению натяжения . Полученные электрические сигналы разностей 6 , л^, л^, д. , соот, ветствующие ошибкам управления в зонах технологической линии, поступают на входы первых блоков 18,19,20,21 управления приводами и в соответствующих сочетаниях - на входы сумматоров преобразователей 25,26,27, посредством которых в каждой из зон, кроме первой приводятся ошибки управления з зонах. Полученные электрические сигналы S , б , 5 5 , соответствующие приведенным ошибкам управления, поступают на входы вторых блоков 22,23,24 управления приводами, выходы которых связаны с регуляторами скоростей приводов. ? ил. ф 00 00 00 1300838 ления приводами Ь,9,Ш. Выходы сумИзобретение относится к устройстматоров-преобразователей 25 ,26,27 вам регулирования натяжения> конкретсвязаны через вторые блоки 22,23,24 нее к устройствам для стабилизации управления приводами 8,9,10 с вторысоотношения натяжения движущегося ми входами сумматоров 17. Выход заматериала в зонах многодвигательной датчика 32 натяжения соединен с втотехнологической линии. рыми входами блоков 28,29,30,31 сравЦель изобретения - повышение стенения . пени стабилизации соотношения натяжеУстройство работает следующим обния. 10 разом. На фиг. 1 изображена структурная Независимо регулируемый сигнал &., схема устройства; на фиг. 2 - струкпосредством регулятора 12 скорости турные схемы сумматоров-преобразоваподается на привод (электродвигателей. тель) 6, который приводит в движеУстройств-о содержит транспортируюние транспортирующие валики 1 так, щие валики 1,2,3,4,5, приводы 6,7, что частота вращения последних про8,9,10, датчики 11 натяжения, регу-' порциональна величине ^ , чем задаляторы 12,13,14,15,16 скорости приется скорость транспортирования маводов, сумматоры 17, первые блоки териала в зонах технологической ли18,19,20,21 управления приводами, нии. вторые блоки 22,23,24 управления приводами , сумматоры-преобразователи Электрические сигналы обратной 25,26,27, блоки 28,29,30,31 сравнеS связи S ,, S-, S,, S соответствуюния и задатчик 32 натяжения. щие текущим величинам натяжений двиСумматоры-преобразователи 25,26, жущегося материала в зонах технологи25 27 вьптолнены на основе операционных ческой линии, и электрический сигнал усилителей 33, у которых посредством S, соответствующий задаваемым натяжедвухполюсников 34 ( Z Q C i ) , 35 ( Z O C 2 ) , .ниям в зонах, технологической линии, 36 ( Z o c ) соединены входы и выходы, поступают с выходов датчиков 11 и причем последние являются выходами задатчика 32 натяжения на входы блои сумматоров-преобразователей 25, 26, 3® ков 28, 29,30,31 сравнения. В послед27. Входами сумматоров-преобразованих осуществляется вычитание из сигтелей 25,26,27 являются первые клемнала S сигналов, пропорциональных мы двухполюсников 37(Z B X 1 ), 3 8 ( Z 6 X 2 ) , соответственно S , S 2 , S , S 4 , при39 ( Z 6 X 3 ) , 40 ( Z ^ ) , 41 ( Z M s ) , чем коэффициенты пропорциональности" 42 ( Z b X & ) , а их вторые клеммы соеди- 35 выставляются заранее. Полученные нены с входами операционных усилитеэлектрические сигналы разностей л , лей 33. Датчики 11 натяжения установ&„, Д^, л , соответствующие ошибкам лены в зонах технологической линии управления в зонах технологической и связаны с первыми входами соответлинии, поступают с выходов блоков ствующих блоков 28,29,30,31 сравне- 40 28,29,30,31 сравнения на входы перния, выходы которых соединены с вховых блоков 18,19,20,21 управления дами соответственно первых блоков приводами н в соответствующих соче18,19,20,21 управления приводами. Вытаниях - на входы сумматоров-преобход блока 28 сравнения связан с вхоразователей 25,26,27, посредством дами сумматоров-преобразователей 25, ^5 которых к каждой из зон, кроме пер26,27. Выход блока 29 сравнения соевой по ходу движения материала от динен с входами сумматоров-преобразотранспортирующих валиков 1 к валикам вателей26,27. Выход блока 30 срав5, приводятся ошибки управления в нения связан с входом сумматора-презонах, предыдущих по ходу материала. образователя 27. 50 Электрические сигналы Ь^ ,Ь ,о 5 , соВход регулятора 13 скорости втоответствующие приведенным ошибкам рого привода 7 соединен с выходом управления, поступают с выходов сумпервого блока 18 управления приводом маторов-преобразователей 25,26,27 на 7,а входы регуляторов 14,15,16 сковходы вторых блоков 22, 23, 24 управрости приводов 8,9,10 связаны с вы- 55 ления приводами. Посредством первого ходами соответствующих сумматоров 17, блока 18 управления приводом 7 его первые входы которых соединены с вывходной сигнал & , преобразуется в . ходами первых'блоков 19,20,21 управэлектрический сигнал поступающий 1300838 благодаря наличию сумматоров-преобна вход регулятора скорости привода разователей. При этом происходит од7, а посредством первых блоков 19,20, новременное изменение режимов рабо21 управления приводами 8,9,10 и втоты приводов в каждой из зон, послерых блоков 22,23,24 управления приводующей по ходу материала по отношедами их входные сигналы і , л, й.и S ,8,8 преобразуются в электричеснию к той, где изменился сигнал разкие сигналы 2,., Q . $ 2, ности, предотвращающий отклонение 52' натяжения в них от заданной величины, которые посредством сумматоров 17 а в остальных зонах режимы работы преобразуются в 'сигналы 5 2 52^, S? s , поступающие на входы регуляторов 14, 0 приводов не меняются. 15, 16 скорости, которые управляют Ф о р м у л а и з о б р е т е н и я приводами (электродвигателями) 7,8,9, 10 так, что частоты вращения последних пропорциональны величинам сигнаУстройство для стабилизации соотлов & 2 , 2 3 , 2 4 , 2 Э Приводы (электро- 15 ношения натяжения движущегося матедвигатели) 7,8,9,10 приводят во врариала в зонах многодвигательной техщение транспортирующие валики 2,4,3, нологической линии, содержащее ре5, перемещающие в зонах технологичесгуляторы скорости приводов транспоркой линии обрабатываемый материал. тирующих валиков, датчики натяжения, При изменении одного или несколь- 20 установленные в зонах технологической линии и связанные с первыми вхоких сигналов обратной связи в случае дами соответствующих блоков сравнеизменения сигналов 2 , или S по требония, блоки управления приводами, сумваниям технологического процесса или маторы и задатчик натяжения, о т л ив случае появления возмущающего воздействия в какой-либо из зон техно- 25 ч а ю щ е е с я тем, что, с целью логическои линии происходит изменеповышения степени стабилизации соотние всех или нескольких сигналов разношения натяжения, оно имеет для ностей V , &., &,, й.. Б случае изменекаждого привода, начиная с третьего ния всех сигналов разностей происхопо ходу движения материала сумматорыдит также изменение всех сигналов, 30 преобразователи, причем вход регуляуправляющих электродвигателями, блатора скорости второго привода соедигодаря описанным выше связям в устнен с выходом первого блока управлеройстве, и при соответствующей нания приводом, а входы регуляторов стройке сумматоров-преобразователей скорости приводов, начиная с третьего 25,26,27 посредством выбора парамет- $5 » связаны с выходами соответстров двухполюсников 34,35,36,37,38, вующих сумматоров, первые входы кото39,40,41 и 42 обеспечивается такой рых соединены с выходами соответстрежим разгона или замедления транвующих первых блоков управления припортирующих валиков 2,3,4,5, при ководами, а вторые входы через вторые тором натяжение в зонах технологи-" 40 блоки управления приводами связаны ческой линии стабилизируется или изс выходами сумматоров-преобразоватеменяется в переходных процессах в лей, при этом выход задатчика натяжесоответствии с требованиями технолония соединен с вторыми входами блогического процесса. В случае изменеков сравнения, выходы которых связания одного или нескольких сигналов 45 ны с входами соответствующих первых разностей происходит изменение сигблоков управления приводами и с вхоналов, управляющих электродвигателядами сумматоров-преобразователей, ми, в зонах, где возникло изменение, относящихся к последующим и в последующих по ходу материала приводам. РигЛ Редакхор Л. Павлова Составитель Б. Быховский тв1Г„я1Т Техред М Л ї о р г е н т ^ Коррвкгор^.Швкма^ ВНИИПИ Государственного комитета L^Lf по делам изобретений и открытий 113035, Москва, Ж-Э5, Раушская наб^, д . 4/Ъ ^^^^ т У ж г о р о д ' у л П р о е к т н а Я ї
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for stabilization of tension ratio of moving material in areas of multimotor processing line
Автори англійськоюArkushyn Vasyl Prokopovych, Radchenko Oleksii Leonidovych
Назва патенту російськоюУстройство для стабилизации соотношения натяжения движущегося материала в зонах многодвигательной технологической линии
Автори російськоюАркушин Василий Прокофьевич, Радченко Алексей Леонидович
МПК / Мітки
МПК: B65H 77/00
Мітки: пристрій, багаторухової, технологічної, лінії, матеріалу, стабілізації, зонах, натягу, рухаючогося, співвідношення
Код посилання
<a href="https://ua.patents.su/4-11500-pristrijj-dlya-stabilizaci-spivvidnoshennya-natyagu-rukhayuchogosya-materialu-v-zonakh-bagatorukhovo-tekhnologichno-lini.html" target="_blank" rel="follow" title="База патентів України">Пристрій для стабілізації співвідношення натягу рухаючогося матеріалу в зонах багаторухової технологічної лінії</a>
Пристрій для підтримання заданого співвідношення швидкостей в багатодвигунному електроприводі
Номер патенту: 11497
Опубліковано: 25.12.1996
Автори: Воронецький Ігор Якович, Бойчук Леонід Михайлович, Охмакевич Василь Федорович
МПК: H02P 5/46
Мітки: заданого, підтримання, швидкостей, пристрій, багатодвигунному, співвідношення, електроприводі
Формула / Реферат:
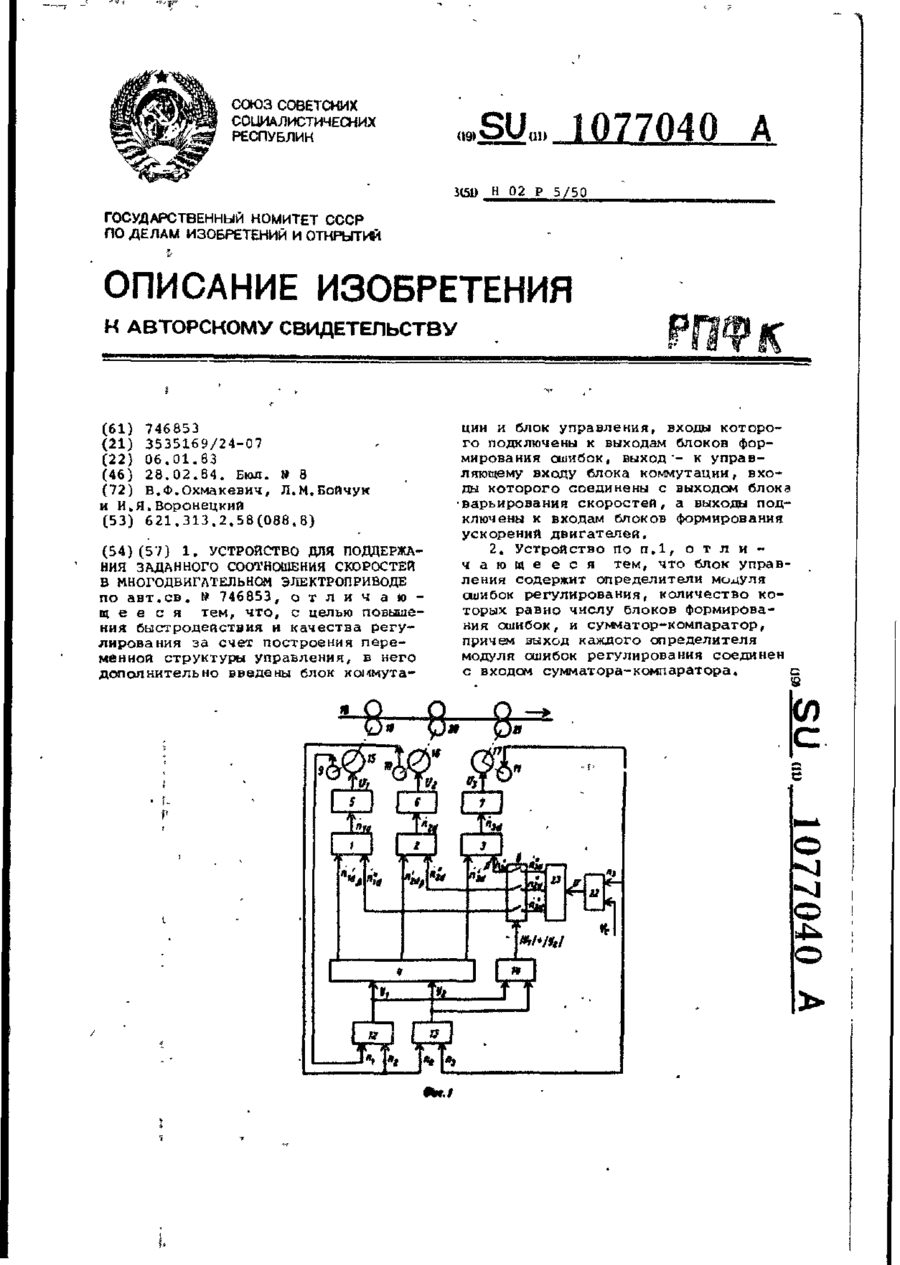
1 .Устройство для поддержания заданного соотношения скоростей в многодвигательном электроприводе по авт.св. № 746853, отличающееся тем, что, с целью повышения быстродействия ее качества регулирования за счет построения переменной структуры управления, в него дополнительно введены блок коммутации и блок управления, входы которого подключены к выходам блоков формирования ошибок, выход - к управляющему входу блока коммутации, входы...
Пристрій для формування залишків по модулю
Номер патенту: 612
Опубліковано: 15.12.1993
Автор: Черкаський Микола Вячеславович
МПК: H03M 7/14
Мітки: формування, залишків, пристрій, модулю
Формула / Реферат:
Формула изобретения1. Устройство для формирования остатков по модулю, содержащее (1-1) групп одноразрядных сумматоров (1= n/q, где n - разрядность числа, q - число сумматоров в группах) и блок свертки, причем прямые входы первого слагаемого одноразрядных сумматоров і-й группы (I = 1 - 1 - 1) соединены с входами соответствующих разрядов (і+1)-й группы информационного входа устройства, выход переноса к-го одноразрядного сумматора і-й...
Пристрій для формування залишків по модулю
Номер патенту: 614
Опубліковано: 15.12.1993
Автор: Черкаський Микола Вячеславович
МПК: G06F 7/60, G06F 11/00
Мітки: залишків, пристрій, модулю, формування
Формула / Реферат:
Формула изобретения1. Устройство для формирования остатков по модулю, содержащее 1-1 группу сумматоров (1 = n/q, n - разрядность числа, q - число сумматоров в группе) и блок свертки, выходы которого являются выходами устройства, прямые входы первого слагаемого и входы переноса сумматоров первой группы являются первой, второй и третьей группами информационного входов устройства, прямые входы первого слагаемого сумматоров (і-й группы. (і...
Пристрій множення елементів скінченних полів
Номер патенту: 4046
Опубліковано: 27.12.1994
Автори: Кодров Віктор Іванович, Варіченко Леонід Вікторович
МПК: G06F 7/52, G06F 7/496, G06F 7/49
Мітки: полів, скінченних, множення, пристрій, елементів
Формула / Реферат:
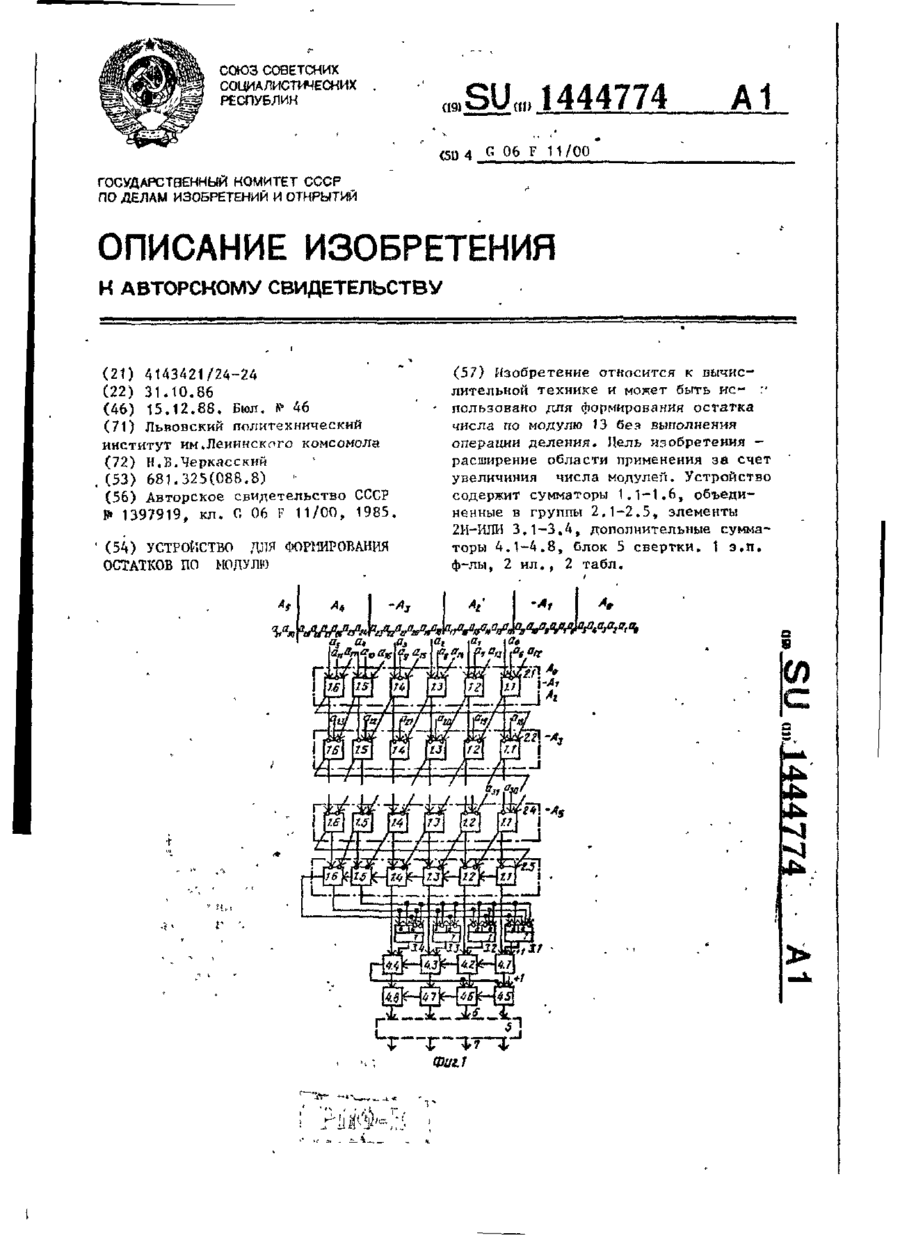
Устройство для умножения элементов конечных полей GF (2n), содержащее блок формирования частичных произведений, состоящий из n групп по n элементов И в каждой, (n-1) блоков матричного преобразования и блок суммирования, выходы которого соединены с выходом результата устройства, вход i-го разряда, (і = 1, ..., n) первого сомножителя которого соединен с объединенными первыми входами элементов И i-ой группы блока формирования частичных...
Пристрій для вимірювання деформації матеріалу
Номер патенту: 3239
Опубліковано: 26.12.1994
Автори: Піцан Роман Михайлович, Лонкевич Євген Сергійович, Винницький Володимир Миколайович
МПК: G01B 7/02
Мітки: матеріалу, деформації, вимірювання, пристрій
Формула / Реферат:
Устройство для измерения деформации материала, содержащее ряд последовательно расположенных секций, каждая из которых включает приводное устройство с электродвигателем, систему управления электродвигателем, измеритель скорости и измеритель натяжения материала, соединенные со входами системы управления. сигнализатор линейной скорости и блок точного измерения модуля упругости материала, выход измерителя скорости соединен со входом сигнализатора...
Попередній патент: Комутаційний фільтр середнього значення сигналу
Наступний патент: Hагрівач
Випадковий патент: Спосіб виготовлення поковок типу пластин