Спосіб управління потужністю мотор-колеса
Номер патенту: 115839
Опубліковано: 25.04.2017
Автори: Савин Сергій Олександрович, Матковський Максим Володимирович, Семенов Костянтин Іванович, Трутнев Олег Михайлович

Формула / Реферат
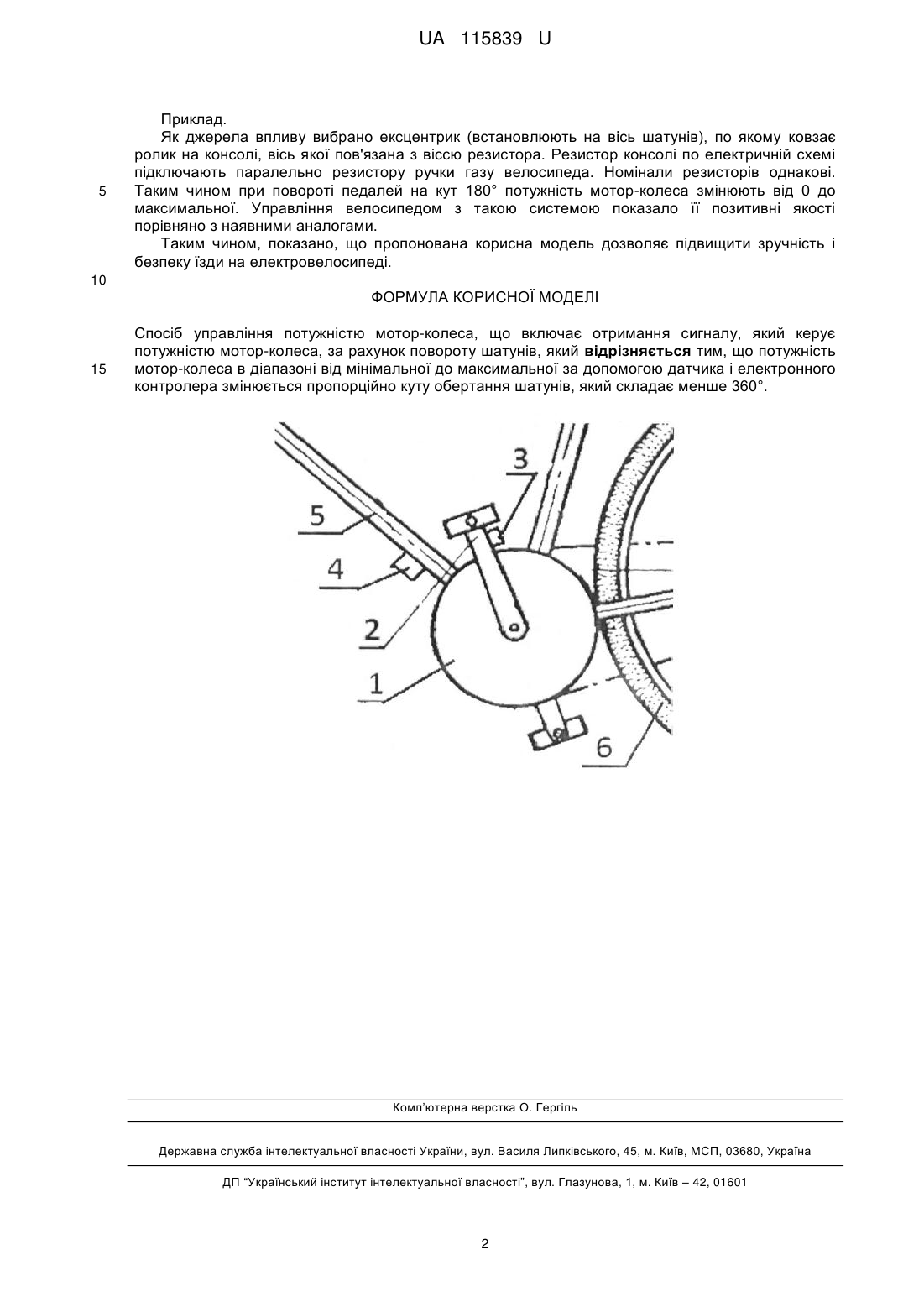
Спосіб управління потужністю мотор-колеса, що включає отримання сигналу, який керує потужністю мотор-колеса, за рахунок повороту шатунів, який відрізняється тим, що потужність мотор-колеса в діапазоні від мінімальної до максимальної за допомогою датчика і електронного контролера змінюється пропорційно куту обертання шатунів, який складає менше 360°.
Текст
Реферат: Спосіб управління потужністю мотор-колеса включає отримання сигналу, який керує потужністю мотор-колеса, за рахунок повороту шатунів. Потужність мотор-колеса в діапазоні від мінімальної до максимальної за допомогою датчика і електронного контролера змінюється пропорційно куту обертання шатунів, який складає менше 360°. UA 115839 U (12) UA 115839 U UA 115839 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до способів керування потужністю мотор-колеса. Розвиток техніки потребує формування нових можливостей по її управлінню, зокрема керуванню такими транспортними засобами як електровелосипед, які підвищують безпеку його руху. Спосіб може бути застосований в системах керування потужністю мотор-колеса. Відомій спосіб для реалізації управління електротягою як допоміжного джерела потужності, електровелосипеда застосовують систему PAS (pedaling assisted system), (Thomas Boyle. Pedal assist sensor. US 8965610 B2 від 24.02.2015). Спосіб полягає в тому, що потужність, що розвивається велосипедистом перетвориться в сигнал керування потужністю мотор-колеса. Ролик на консольній балці ковзає по велосипедному ланцюгу. Отримане відхилення консольної балці забезпечує вимірювання натягу ланцюга, яке перетворюють в керуючий сигнал для електродвигуна. Недоліком способу є те, що зміна потужності може відбуватися через трясіння велосипеда при їзді по нерівній дорозі. Відомій спосіб для реалізації управління електротягою, мотор колесом e-bike (http://velomasterclass.ru/sistema-upravleniva-motor-kolesom-e-bike/), який реалізують за допомогою ручки акселератора, простіше кажучи ручки газу. В ній встановлюють три датчики Холла і підводиться напруга 5 Вольт. Повертаючи ручку на певний кут, на виході змінюють напругу 0-4,2 або 0-5 Вольт. Ручкою газу керують контролером. У залежності від величини напруги, яка приходить від ручки газу, контролер змінює подачу енергії на колесо. Недоліком способу є те, що навички велосипедиста не пов'язані з роботою з ручкою газу, розвиток яких зменшує безпеку їзди, крім того управління ручкою газу ускладнює можливість користуватися важелем гальма, що також сприяє аварійності. Як найближчий аналог вибрано спосіб, система pedelec, (Wen-Yen Chen, Jung-Chi LAI, ChunHsiung Yin. Method for automatic adjustment of pedelec. US 9108700 B2 від 18.08.2015), який ґрунтується на роботі torque sensor, вбудованого в педальний вузол, коли звичайна каретка замінюється на каретку з torque sensor, який полягає в тому, що потужність, що розвивається велосипедистом, перетвориться в сигнал керування потужністю мотор-колеса східчасто за допомогою контролера, який має закладені в пам'яті градації співвідношень потужності, щоб виміряти величину крутного моменту, що розвиває на педалях велосипедист. В педальний вузол вбудовується вже динамометр, а не звичайний датчик початку руху. Чим сильніше прикладається до педалей зусилля, тим більша допомога мотор-колеса. Завдяки своїй складності, ця технологія отримала широке поширення тільки недавно і тільки на дорогих моделях електровелосипедів, виготовлених на заводі. На звичайну каретку встановити такий сенсор не вийде - на таке вдосконалення її конструкція не розрахована, тому змінюють повністю весь вузол. При цієї переробці велосипед стає значно дорожче. Таким чином, недоліком способу є складність та велика ціна. Недоліком є і те, що тривалості часу від керуючого сигналу від педаль до зміни потужності мотор-колеса відносно велика, оскільки, вочевидь, що для зміни керуючого сигналу швидше повернути шатуни на деякий кут, менший ніж, наприклад, 180°, ніж зробити декілька їх оборотів, і більш прості дії виконуються скоріше (Василенко В.А. Психологические особенности водителя, как фактор безопасности дорожного движения // Молодой ученый. - 2013. - № 2. - С. 309-312). Окрім того, при їзді по пересіченій місцевості обертаються педалі можуть зачіпати нерівності, а тряска ускладнює утримання заданої швидкості обертання шатунів. Задачею корисної моделі є спрощення конструкції, здешевлення, спрощення установки системи керування мотор-колесом і підвищення її якості. Поставлена задача вирішується тим, що спосіб управління потужністю мотор-колеса включає отримання сигналу, який керує міцністю мотор-колеса, за рахунок повороту шатунів, згідно з корисною моделлю, потужність мотор-колеса в діапазоні від мінімальної до максимальної за допомогою датчика і електронного контролера змінюють пропорційно куту повороту шатунів, який є меншим ніж 360°. На кресленні відображена схема здійснення способу. Здійснюють спосіб наступним чином. На ведучу зірочку 1 велосипеда (але на один з шатунів 2) кріпиться джерело впливу 3 (наприклад, магніт, коливальний контур та ін., джерелом може служити сам шатун) на датчик 4 (прикріплено, наприклад, до рами велосипеда 5), сигнал з котрого подають на перетворювач відстані від джерела 3 до датчика 4 в кут повороту, а далі в сигнал керування потужністю моторколеса 6 за заданим законом. Корисна модель дозволяє підвищити швидкість реакції мотор колеса на клерувальні дії велосипедиста, спростити керування, збільшити якість їзді по пересіченій місцевості, спростити та здешевити систему керування та її приєднання до велосипеда. Можливість здійснення корисної моделі показано наступним прикладом. 1 UA 115839 U 5 Приклад. Як джерела впливу вибрано ексцентрик (встановлюють на вісь шатунів), по якому ковзає ролик на консолі, вісь якої пов'язана з віссю резистора. Резистор консолі по електричній схемі підключають паралельно резистору ручки газу велосипеда. Номінали резисторів однакові. Таким чином при повороті педалей на кут 180° потужність мотор-колеса змінюють від 0 до максимальної. Управління велосипедом з такою системою показало її позитивні якості порівняно з наявними аналогами. Таким чином, показано, що пропонована корисна модель дозволяє підвищити зручність і безпеку їзди на електровелосипеді. 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 Спосіб управління потужністю мотор-колеса, що включає отримання сигналу, який керує потужністю мотор-колеса, за рахунок повороту шатунів, який відрізняється тим, що потужність мотор-колеса в діапазоні від мінімальної до максимальної за допомогою датчика і електронного контролера змінюється пропорційно куту обертання шатунів, який складає менше 360°. Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
Мітки: управління, спосіб, потужністю, мотор-колеса
Код посилання
<a href="https://ua.patents.su/4-115839-sposib-upravlinnya-potuzhnistyu-motor-kolesa.html" target="_blank" rel="follow" title="База патентів України">Спосіб управління потужністю мотор-колеса</a>
Система управління потужністю двигунів внутрішнього згоряння відключенням робочих циклів
Номер патенту: 70122
Опубліковано: 15.09.2004
Автори: Філіппов Анатолій Захарович, Синявський Микола Володимирович, Атаманенко Микола Євгенович, Попик Анатолій Федорович, Панченко Михайло Іванович
МПК: F02D 17/00
Мітки: згоряння, двигунів, потужністю, циклів, управління, внутрішнього, система, робочих, відключенням
Формула / Реферат:
Система управління потужністю двигунів внутрішнього згоряння відключенням робочих циклів, що містить електронний пристрій управління впорскуванням палива та електромагнітні форсунки, яка відрізняється тим, що система доповнена електронним пристроєм, який включає логічний елемент АБО, очікуючий мультивібратор, логічний блок збігу, причому вхід лінії затримки підключений до виходу електронного пристрою управління впорскуванням через логічний...
Спосіб керування потужністю в замкненій системі керування потужністю системи зв’язку з режимом паралельного доступу з кодовим розподілом каналів (пдкр) (варіанти) та замкнена система керування потужністю систем
Номер патенту: 57747
Опубліковано: 15.07.2003
Автор: Сеінтс Кіт В.
МПК: H04B 7/00
Мітки: пдкр, потужністю, замкнений, систем, замкнена, режимом, доступу, системі, каналів, розподілом, варіанти, кодовим, керування, паралельного, зв'язку, спосіб, система
Формула / Реферат:
1. Спосіб керування потужністю в замкненій системі керування потужністю системи зв'язку з режимом паралельного доступу з кодовим розподілом каналів (ПДКР), який полягає в:вимірюванні значення енергії у смузі частот,вимірюванні енергії пілот-каналу,перерахунку зазначеної енергії пілот-каналу відповідно до значення пілотної складової для одержання значення неперешкоджаючої енергії.відніманні зазначеного значення...
Спосіб розвороту транспортного засобу з усіма керованими і поворотними мотор-колесами
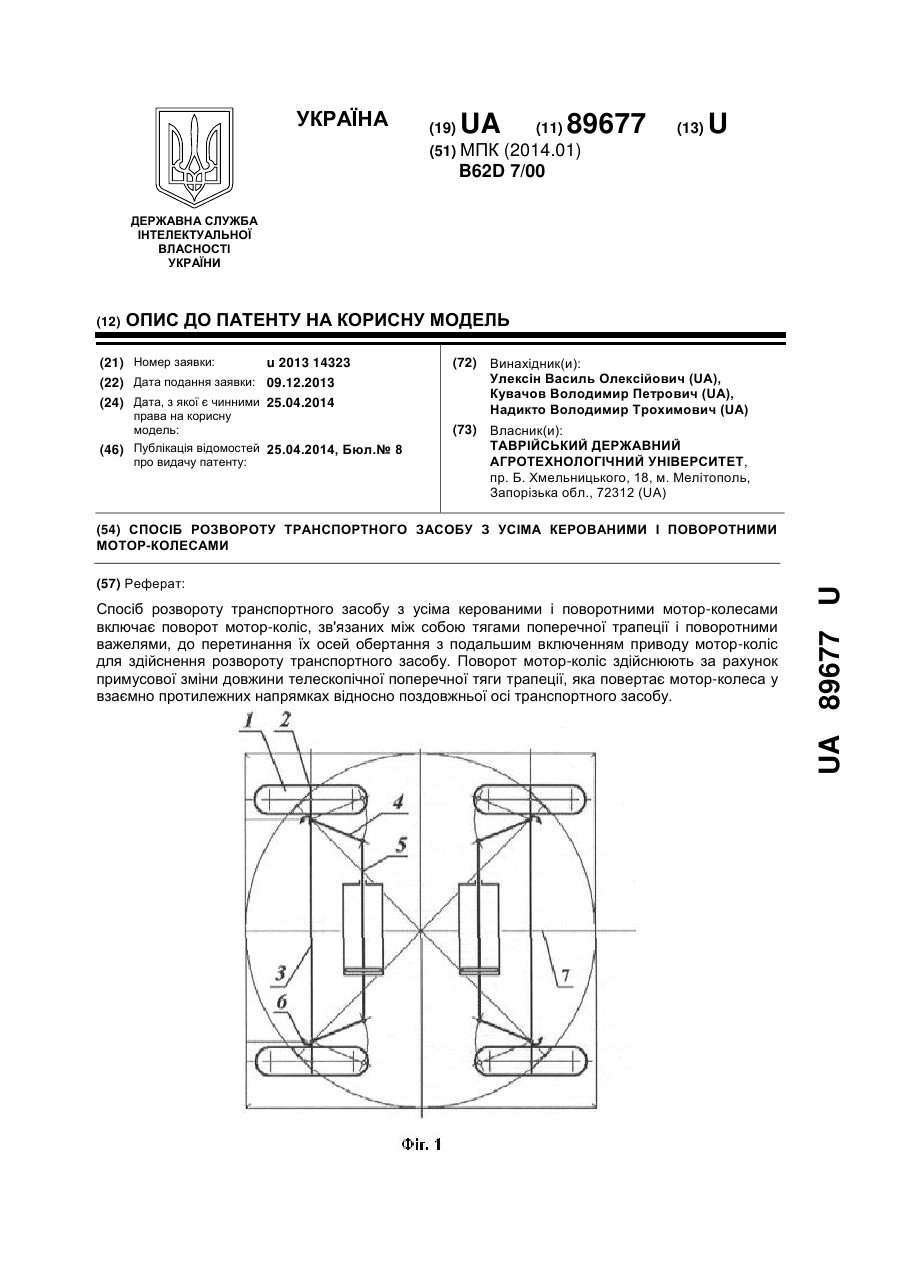
Номер патенту: 89677
Опубліковано: 25.04.2014
Автори: Надикто Володимир Трохимович, Улексін Василь Олексійович, Кувачов Володимир Петрович
МПК: B62D 7/00
Мітки: транспортного, керованими, розвороту, засобу, спосіб, усіма, поворотними, мотор-колесами
Формула / Реферат:
Спосіб розвороту транспортного засобу з усіма керованими і поворотними мотор-колесами, що включає поворот мотор-коліс, зв'язаних між собою тягами поперечної трапеції і поворотними важелями, до перетинання їх осей обертання з подальшим включенням приводу мотор-коліс для здійснення розвороту транспортного засобу, який відрізняється тим, що поворот мотор-коліс здійснюють за рахунок примусової зміни довжини телескопічної поперечної тяги...
Система та спосіб управління потужністю глобальної багатосупутникової системи
Номер патенту: 26214
Опубліковано: 19.07.1999
Автори: Леопольд Реймонд Джозеф, Бертіджер Барі Роберт, Петерсон Кеннет Мейнард
МПК: H04B 7/185
Мітки: управління, спосіб, система, системі, багатосупутникової, потужністю, глобальної
Формула / Реферат:
1, Система, управления мощностью глобальной многоспутниковой системы, в которой входящие в нее спутники образуют созвездие с пересекающимися орбитами, причем каждый спутник содержит множество антенн, проецирующих множество лепестков диаграмм направленности на земную поверхность, причем каждый лепесток имеет первую зону обслуживания на земной поверхности, или "ячейку", причем сумма ячеек для каждого спутника образует вторую зону...
Спосіб керування тепловою потужністю трубчастої обертової печі
Номер патенту: 20168
Опубліковано: 15.01.2007
Автори: Малий Владіслав Костянтинович, Лисиця Вадим Костянтинович
МПК: F27B 7/42
Мітки: спосіб, тепловою, потужністю, керування, трубчастої, печі, обертової
Формула / Реферат:
Спосіб керування тепловою потужністю трубчастої обертової печі, що включає вимірювання температури і керування витратою палива, який відрізняється тим, що вимірюють і стабілізують на оптимальному рівні температуру потоку матеріалу, що вивантажується, на фоні нижнього холодного торця барабана печі.
Попередній патент: Функціональний харчовий продукт “субалакт”
Наступний патент: Система передачі даних
Випадковий патент: Пристрій для сумісної утилізації сірководню і оксидів вуглецю