Система управління безпілотним літальним апаратом
Номер патенту: 116556
Опубліковано: 25.05.2017
Автори: Фірсов Сергій Миколайович, Фомічов Костянтин Федорович, Коваленко Олексій Вячеславович
Формула / Реферат
Система управління безпілотним літальним апаратом, що містить пристрій управління, вихід якого з'єднаний з електричним приводом, вихід якого з'єднаний з об'єктом управління, датчик кутової швидкості, датчик кута, входи яких з'єднані з об'єктом управління, а виходи з пристроєм управління, до четвертого входу якого під'єднано вимірник координат і параметрів руху, радіовисотомір, яка відрізняється тим, що в неї введено блок порівняння, входи якого з'єднані з пристроєм корекції висоти та вертикальної швидкості і радіовисотоміром, а вихід з'єднаний з пристроєм управління.
Текст
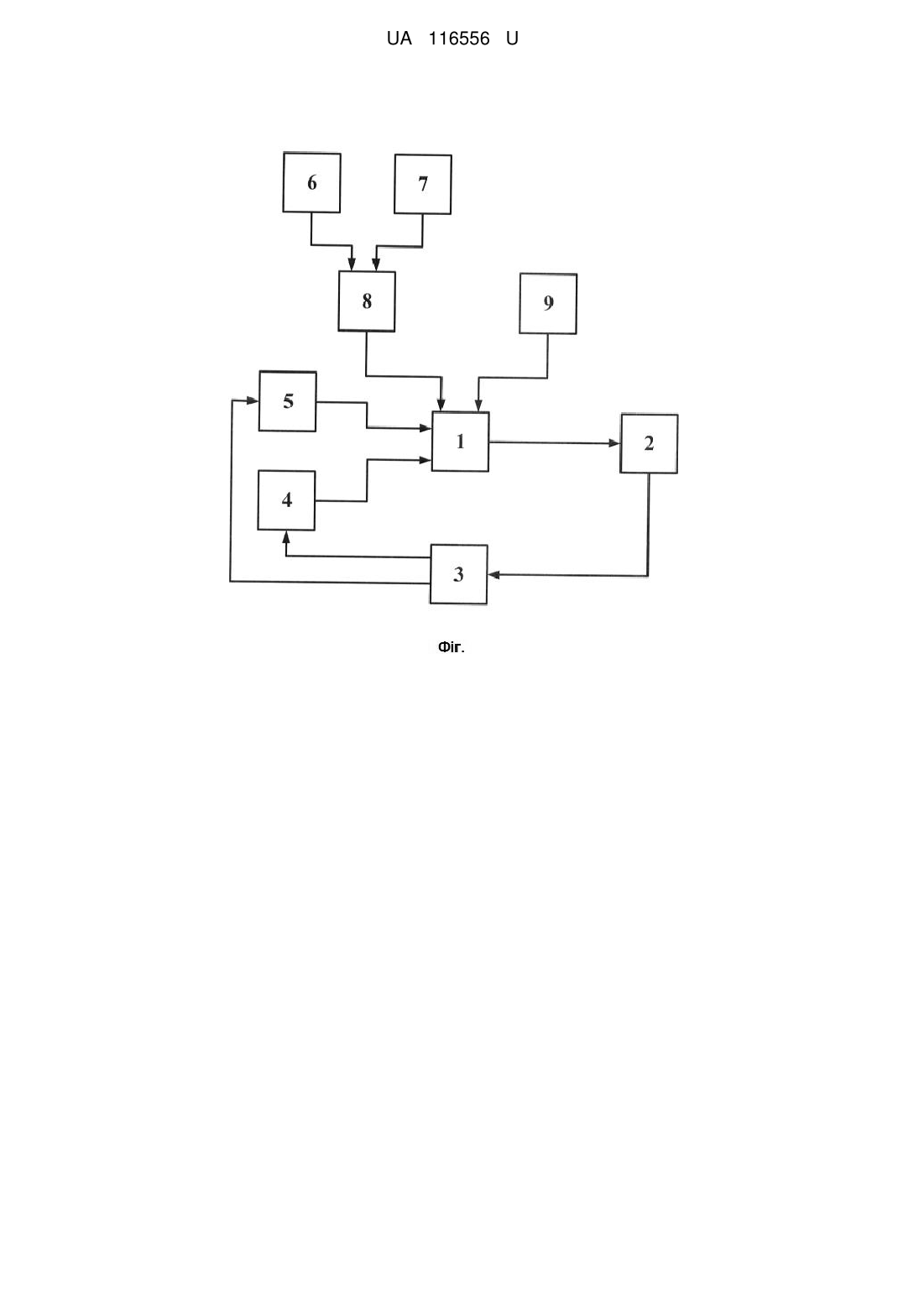
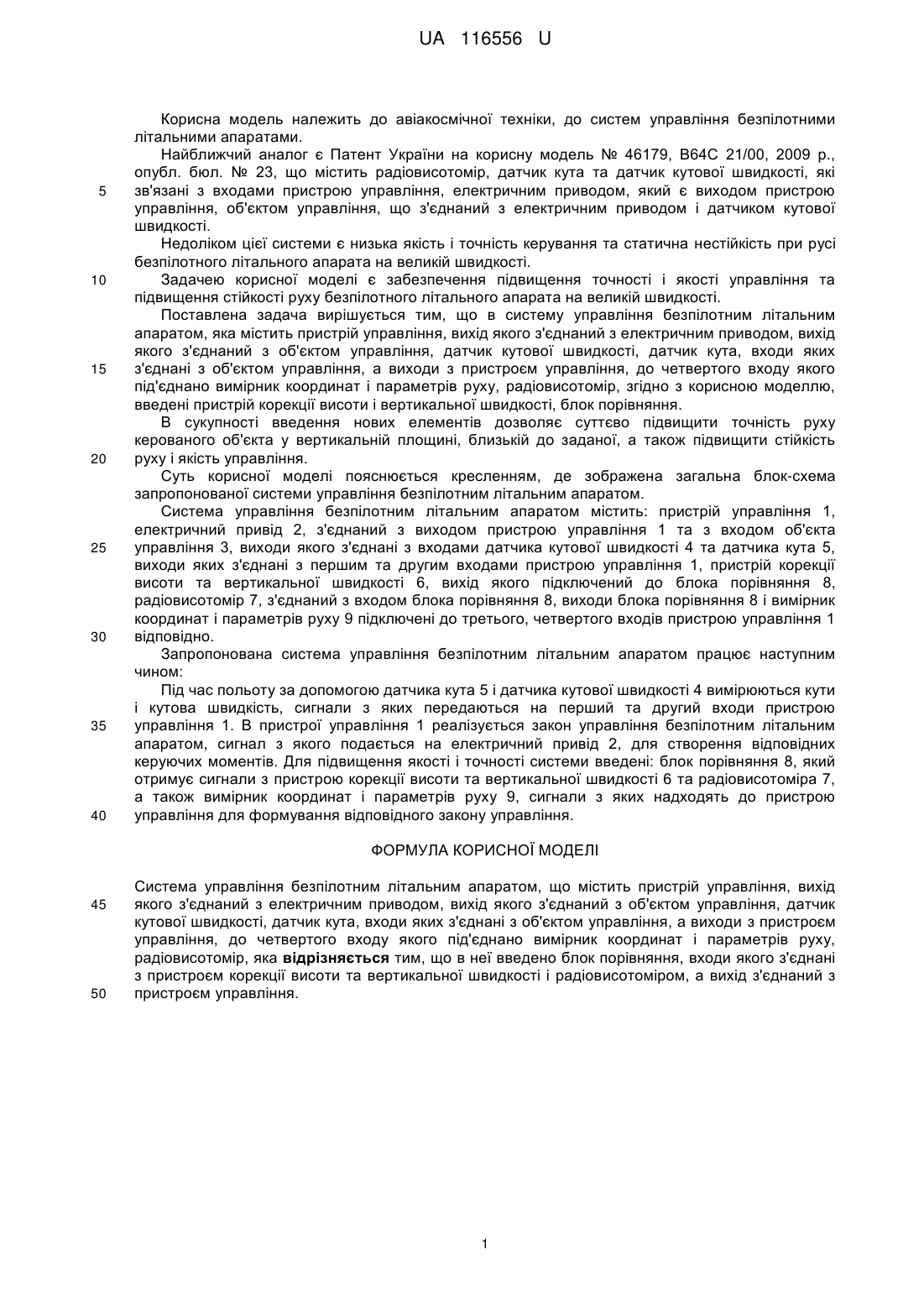
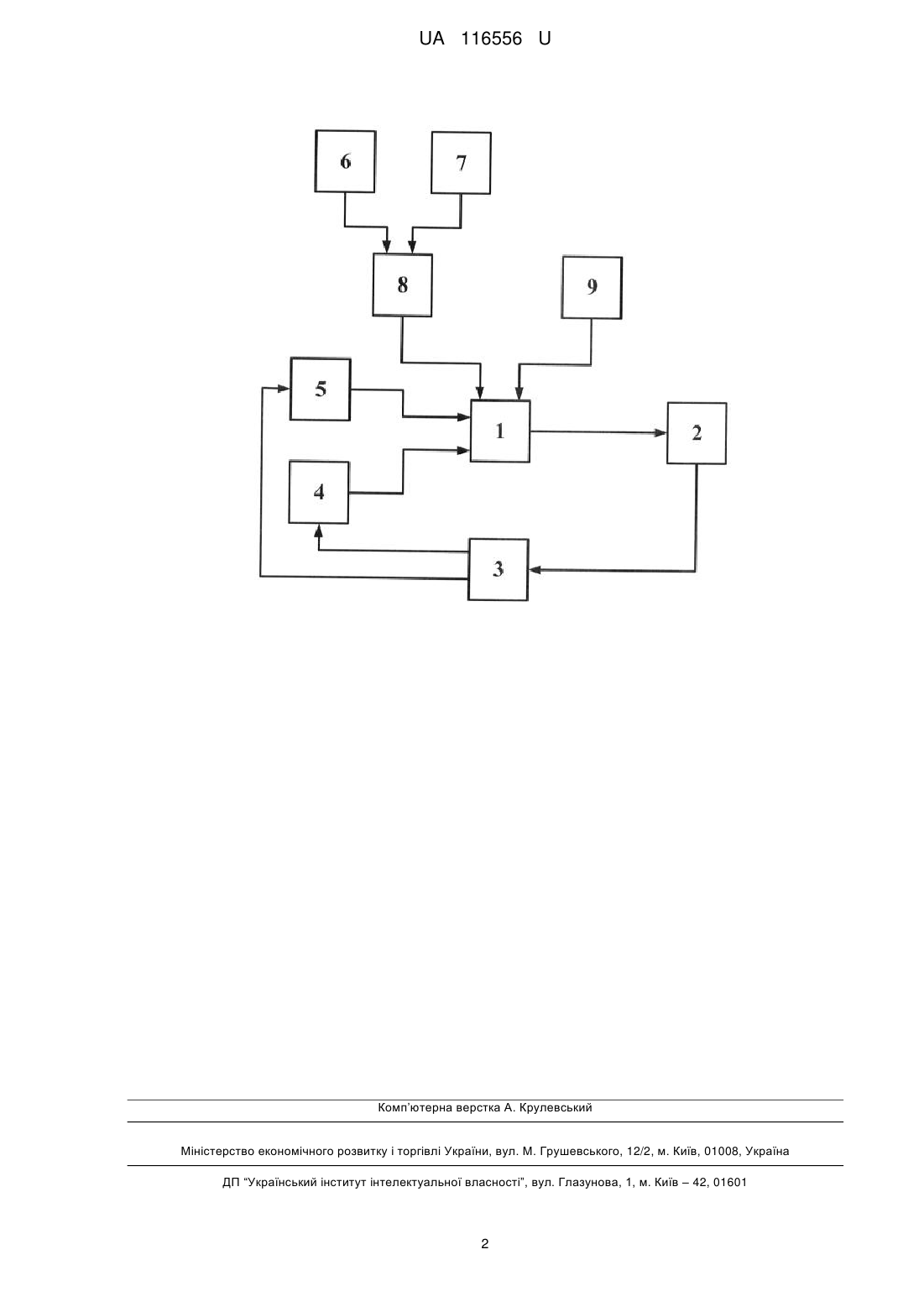
Реферат: Система управління безпілотним літальним апаратом містить пристрій управління, електричний привід, вихід якого з'єднаний з об'єктом управління, датчик кутової швидкості, датчик кута, вимірник координат і параметрів руху, радіовисотомір. Введено блок порівняння, входи якого з'єднані з пристроєм корекції висоти та вертикальної швидкості і радіовисотоміром, а вихід з'єднаний з пристроєм управління. UA 116556 U (54) СИСТЕМА УПРАВЛІННЯ БЕЗПІЛОТНИМ ЛІТАЛЬНИМ АПАРАТОМ UA 116556 U UA 116556 U 5 10 15 20 25 30 35 40 Корисна модель належить до авіакосмічної техніки, до систем управління безпілотними літальними апаратами. Найближчий аналог є Патент України на корисну модель № 46179, В64С 21/00, 2009 р., опубл. бюл. № 23, що містить радіовисотомір, датчик кута та датчик кутової швидкості, які зв'язані з входами пристрою управління, електричним приводом, який є виходом пристрою управління, об'єктом управління, що з'єднаний з електричним приводом і датчиком кутової швидкості. Недоліком цієї системи є низька якість і точність керування та статична нестійкість при русі безпілотного літального апарата на великій швидкості. Задачею корисної моделі є забезпечення підвищення точності і якості управління та підвищення стійкості руху безпілотного літального апарата на великій швидкості. Поставлена задача вирішується тим, що в систему управління безпілотним літальним апаратом, яка містить пристрій управління, вихід якого з'єднаний з електричним приводом, вихід якого з'єднаний з об'єктом управління, датчик кутової швидкості, датчик кута, входи яких з'єднані з об'єктом управління, а виходи з пристроєм управління, до четвертого входу якого під'єднано вимірник координат і параметрів руху, радіовисотомір, згідно з корисною моделлю, введені пристрій корекції висоти і вертикальної швидкості, блок порівняння. В сукупності введення нових елементів дозволяє суттєво підвищити точність руху керованого об'єкта у вертикальній площині, близькій до заданої, а також підвищити стійкість руху і якість управління. Суть корисної моделі пояснюється кресленням, де зображена загальна блок-схема запропонованої системи управління безпілотним літальним апаратом. Система управління безпілотним літальним апаратом містить: пристрій управління 1, електричний привід 2, з'єднаний з виходом пристрою управління 1 та з входом об'єкта управління 3, виходи якого з'єднані з входами датчика кутової швидкості 4 та датчика кута 5, виходи яких з'єднані з першим та другим входами пристрою управління 1, пристрій корекції висоти та вертикальної швидкості 6, вихід якого підключений до блока порівняння 8, радіовисотомір 7, з'єднаний з входом блока порівняння 8, виходи блока порівняння 8 і вимірник координат і параметрів руху 9 підключені до третього, четвертого входів пристрою управління 1 відповідно. Запропонована система управління безпілотним літальним апаратом працює наступним чином: Під час польоту за допомогою датчика кута 5 і датчика кутової швидкості 4 вимірюються кути і кутова швидкість, сигнали з яких передаються на перший та другий входи пристрою управління 1. В пристрої управління 1 реалізується закон управління безпілотним літальним апаратом, сигнал з якого подається на електричний привід 2, для створення відповідних керуючих моментів. Для підвищення якості і точності системи введені: блок порівняння 8, який отримує сигнали з пристрою корекції висоти та вертикальної швидкості 6 та радіовисотоміра 7, а також вимірник координат і параметрів руху 9, сигнали з яких надходять до пристрою управління для формування відповідного закону управління. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 Система управління безпілотним літальним апаратом, що містить пристрій управління, вихід якого з'єднаний з електричним приводом, вихід якого з'єднаний з об'єктом управління, датчик кутової швидкості, датчик кута, входи яких з'єднані з об'єктом управління, а виходи з пристроєм управління, до четвертого входу якого під'єднано вимірник координат і параметрів руху, радіовисотомір, яка відрізняється тим, що в неї введено блок порівняння, входи якого з'єднані з пристроєм корекції висоти та вертикальної швидкості і радіовисотоміром, а вихід з'єднаний з пристроєм управління. 1 UA 116556 U Комп’ютерна верстка А. Крулевський Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B64C 21/00, G05D 1/12
Мітки: безпілотним, система, апаратом, управління, літальним
Код посилання
<a href="https://ua.patents.su/4-116556-sistema-upravlinnya-bezpilotnim-litalnim-aparatom.html" target="_blank" rel="follow" title="База патентів України">Система управління безпілотним літальним апаратом</a>
Система керування безпілотним літальним апаратом
Номер патенту: 55410
Опубліковано: 10.12.2010
Автори: Нгуен Ван Тхінь, Таранова Світлана Ігорівна, Фірсов Сергій Миколайович, Кулік Анатолій Степанович
МПК: B64C 21/00
Мітки: система, безпілотним, літальним, апаратом, керування
Формула / Реферат:
Система керування безпілотним літальним апаратом, яка містить пристрій управління, електричний привід, вхід якого з'єднаний з виходом пристрою управління, датчик кутової швидкості, з'єднаний з першим входом пристрою управління, датчик кута, з'єднаний з другим входом пристрою управління, магнітний курс, висотомір, GPS, виходи яких підключені до третього, четвертого, пятого входів пристрою управління відповідно, яка відрізняється тим, що в неї...
Система керування безпілотним літальним апаратом
Номер патенту: 46179
Опубліковано: 10.12.2009
Автори: Фірсов Сергій Миколайович, До Куок Туан, Гусарова Ганна Григорівна, Кулік Анатолій Степанович
МПК: B64C 21/00
Мітки: апаратом, безпілотним, система, літальним, керування
Формула / Реферат:
Система керування безпілотним літальним апаратом, яка містить пристрій управління, електричний привід, з'єднаний з виходом пристрою управління, датчик кутової швидкості, з'єднаний з першим входом пристрою управління, датчик кута, з'єднаний з другим входом пристрою управління, яка відрізняється тим, що в неї введені магнітний курс, висотомір, GPS, виходи яких підключені до третього, четвертого, п'ятого входів пристрою управління...
Система керування безпілотним літальним апаратом

Номер патенту: 79320
Опубліковано: 25.04.2013
Автори: Фірсов Сергій Миколайович, Кулік Анатолій Степанович, Таранова Людмила Ігорівна
МПК: B64C 13/00
Мітки: керування, безпілотним, апаратом, система, літальним
Формула / Реферат:
Система керування безпілотним літальнім апаратом, яка містить послідовно з'єднані задавач, мультиплексор, аналого-цифровий перетворювач, обчислювач, цифро-аналоговий перетворювач, сервопривід та об'єкт керування, другий вихід сервопривода через датчик напруги та третій нормуючий підсилювач з'єднаний з другим входом мультиплексора, третій вихід сервопривода через датчик струму та четвертий нормуючий підсилювач з'єднаний з третім входом...
Система керування безпілотним літальним апаратом
Номер патенту: 58103
Опубліковано: 25.03.2011
Автори: Фірсов Сергій Миколайович, Прийменко Катерина Сергіївна, Нгуєн Ван Тхінь, Данченко Олександр Вячеславович, Кулік Анатолій Степанович
МПК: B64C 21/00
Мітки: керування, апаратом, система, літальним, безпілотним
Формула / Реферат:
Система керування безпілотним літальним апаратом, що містить пристрій управління, електричний привід, з'єднаний з виходом пристрою управління, магнітний курс, висотомір, перший GPS приймач, виходи яких підключені до першого, другого, третього входів пристрою управління відповідно, яка відрізняється тим, що в неї введені перший модуль бездротового зв'язку, вихід якого з'єднаний з четвертим входом пристрою управління, а вхід з'єднаний з другим...
Система керування безпілотним літальним апаратом
Номер патенту: 54022
Опубліковано: 25.10.2010
Автори: Симонов Володимир Федорович, Бандура Іван Миколайович, Назарова Анастасія Олександрівна
МПК: B64C 13/00
Мітки: літальним, система, безпілотним, апаратом, керування
Формула / Реферат:
Система керування безпілотним літальним апаратом, що складається з послідовно з'єднаних підсилювача, рульової машини, керма висоти, безпілотного літального апарата, а також пристрою зворотного зв'язку, вхід якого з'єднаний з першим виходом рульової машини, швидкісного гіроскопа, вхід якого з'єднаний з виходом безпілотного літального апарата, гіровертикалі, вхід якої з'єднаний з виходом безпілотного літального апарата, висотоміра, вхід якого...