Система керування безпілотним літальним апаратом
Номер патенту: 79320
Опубліковано: 25.04.2013
Автори: Кулік Анатолій Степанович, Таранова Людмила Ігорівна, Фірсов Сергій Миколайович

Формула / Реферат
Система керування безпілотним літальнім апаратом, яка містить послідовно з'єднані задавач, мультиплексор, аналого-цифровий перетворювач, обчислювач, цифро-аналоговий перетворювач, сервопривід та об'єкт керування, другий вихід сервопривода через датчик напруги та третій нормуючий підсилювач з'єднаний з другим входом мультиплексора, третій вихід сервопривода через датчик струму та четвертий нормуючий підсилювач з'єднаний з третім входом мультиплексора, перший вихід об'єкта керування через датчик кутової швидкості та перший нормуючий підсилювач з'єднаний з четвертим входом мультиплексора, другий вихід об'єкта керування через датчик кута та другий нормуючий підсилювач з'єднаний з п'ятим входом мультиплексора, яка відрізняється тим, щодо неї введені датчик кута органу керування по тангажу та датчик кута органу керування по крену, третій вихід об'єкта керування через датчик кута органу керування по тангажу з'єднаний з шостим входом мультиплексора, четвертий вихід об'єкта керування через датчик кута органу керування по крену з'єднаний з сьомим входом мультиплексора.
Текст
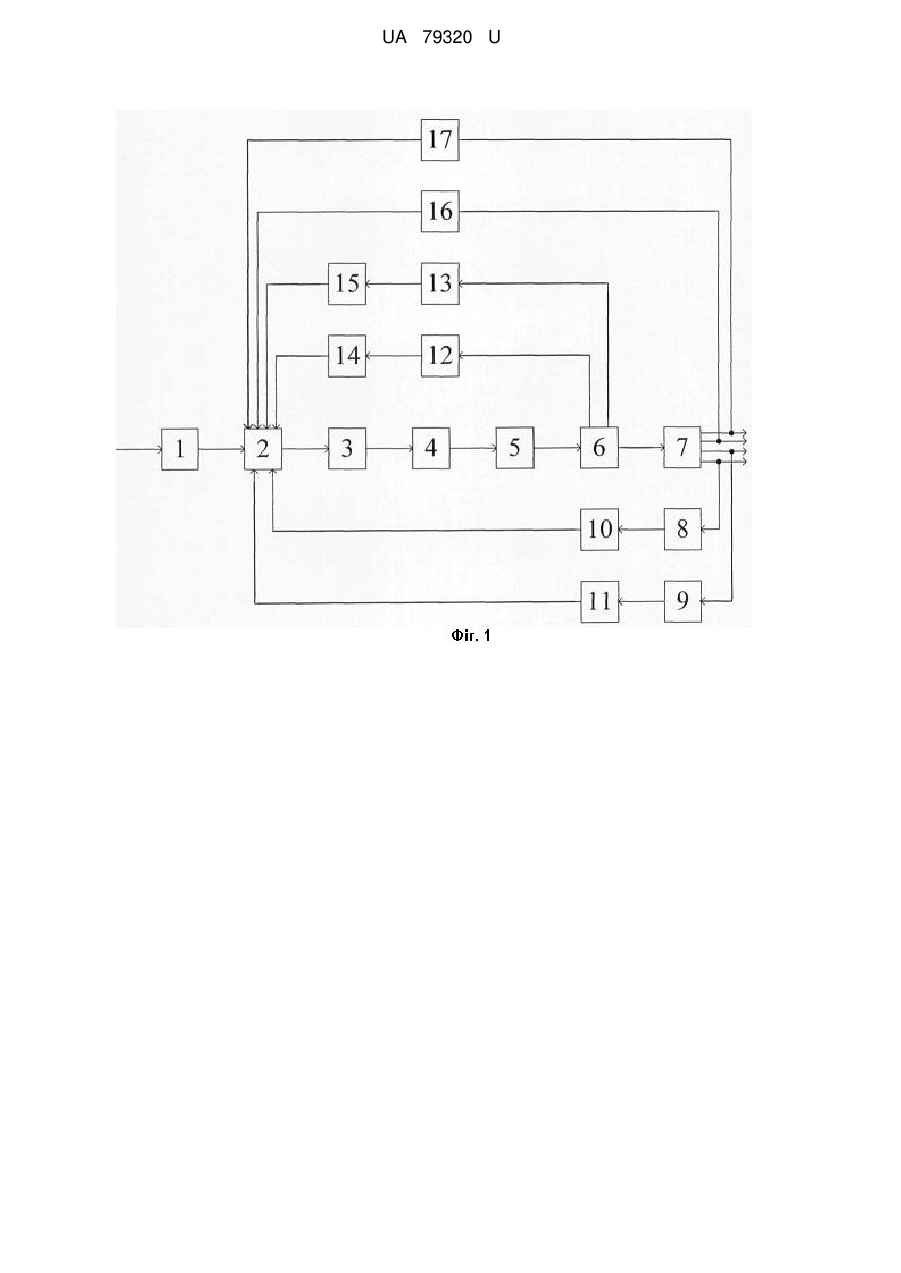
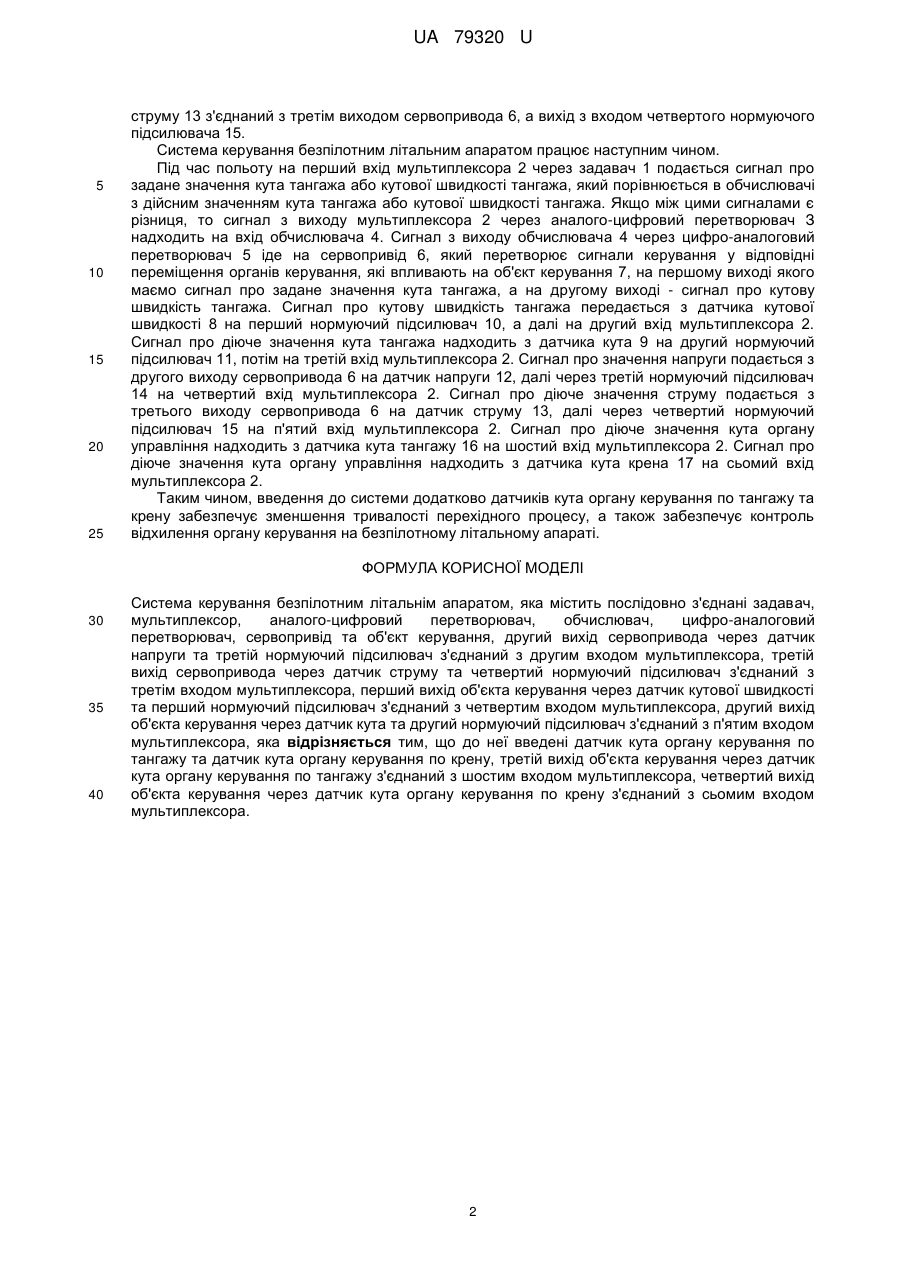
Реферат: UA 79320 U UA 79320 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до області авіаційної техніки, до системи управління безпілотним літальним апаратом. Відома адаптивна система, що складається з послідовно з'єднаних задавача, мультиплексора, аналого-цифрового перетворювача, обчислювача, цифро-аналогового перетворювача, сервопривода, вихід якого під'єднаний до об'єкта керування, датчики кута та кутової швидкості, виходи яких з'єднані з входами відповідно першого та другого нормуючих підсилювачів, виходи яких з'єднані з другим та третім входами мультиплексора, датчик напруги, вхід якого з'єднаний з другим виходом сервопривода, а вихід з'єднаний з третім нормуючим підсилювачем, вихід якого з'єднаний з четвертим входом мультиплексора, а також датчик струму, вхід якого з'єднаний з третім виходом сервопривода, а вихід з'єднаний з четвертим нормуючим підсилювачем, вихід якого з'єднаний з п'ятим входом мультиплексора (Симонов В.Ф., Дибськая І.Ю. Оптимальні і адаптивні системи автоматичного керування: Навч. Посібник для лабораторного практикуму, - Харків: Нац. аерокосм. ун-т "Харк. Авіац. Ін.- т", 2007. - С. 45, рис 6.6). Недоліком цієї системи є низька надійність, недостатня швидкість і точність управління, що обумовлено складністю швидкого вибору коефіцієнтів закону управління та безупинною зміною параметрів системи. Відома система стабілізації безпілотного літального апарата, яка містить послідовно з'єднані задавач, мультиплексор, аналого-цифровий перетворювач, обчислювач, цифроаналоговий перетворювач, сервопривід та об'єкт керування, другий вихід сервопривода через датчик напруги та нормуючий пристрій з'єднаний з другим входом мультиплексора, третій вихід сервопривода через датчик струму та нормуючий пристрій з'єднаний з третім входом мультиплексора, перший вихід об'єкта керування через датчик кутової швидкості та нормуючий підсилювач з'єднаний з четвертим входом мультиплексора, другий вихід об'єкта керування через датчик кута та нормуючий підсилювач з'єднаний з п'ятим входом мультиплексора (Патент України №45231 МПК В64С 13/00, G05D 1/03, опублікований 26.10.2009. Бюл. №20), яка вибрана як прототип. Недоліком цієї системи є тривалий перехідний процес, а також відсутність контролю відхилення органу управління для керування безпілотним літальним апаратом. Задачею корисної моделі є забезпечення зменшення тривалості перехідного процесу, а також забезпечення контролю відхилення органу керування на безпілотному літальному апараті. Поставлена задача вирішується тим, що до складу системи безпілотного літального апарата, яка містить послідовно з'єднані задавач, мультиплексор, аналого-цифровий перетворювач, обчислювач, цифро-аналоговий перетворювач, сервопривід та об'єкт керування, другий вихід сервопривода через датчик напруги та третій нормуючий підсилювач з'єднаний з другим входом мультиплексора, третій вихід сервопривода через датчик струму та четвертий нормуючий підсилювач з'єднаний з третім входом мультиплексора, перший вихід об'єкта керування через датчик кутової швидкості та перший нормуючий підсилювач з'єднаний з четвертим входом мультиплексора, другий вихід об'єкта керування через датчик кута та другий нормуючий підсилювач з'єднаний з п'ятим входом мультиплексора і, згідно з корисною моделлю, до неї введені датчик кута органу керування по тангажу та датчик кута органу керування по крену, третій вихід об'єкта керування через датчик кута органу керування по тангажу з'єднаний з шостим входом мультиплексора, четвертий вихід об'єкта керування через датчик кута органу керування по крену з'єднаний з сьомим входом мультиплексора. На кресленні зображена загальна блок-схема запропонованої системи управління безпілотним літальним апаратом. Система керування безпілотним літальним апаратом містить послідовно з'єднані задавач 1, мультиплексор 2, аналого-цифровий перетворювач 3, обчислювач 4, цифро-аналоговий перетворювач 5 та сервопривід 6. Мультиплексор 2 має сім входів: вихід задавача 1; вихід першого нормуючого підсилювача 10; вихід другого нормуючого підсилювача 11; вихід третього нормуючого підсилювача 14; вихід четвертого нормуючого підсилювача 15, вихід датчика кута органу керування по тангажу 16, вихід датчика кута органу керування по крену 17. Вихід мультиплексора 2 з'єднаний з входом аналого-цифрового перетворювача 3. На БПЛА встановлено датчик кутової швидкості 8, вихід якого з'єднаний з входом першого нормуючого підсилювача 10 та датчик кута 9, вихід якого з'єднаний з входом другого нормуючого підсилювача 11, також датчик кута органу керування по тангажу 16, вихід якого з'єднаний з шостим входом мультиплексора 2, та датчик кута органу керування по крену 17, вихід якого з'єднаний з сьомим входом мультиплексора 2. Вхід датчика напруги 12, з'єднаний з другим виходом сервопривода 6, а вихід з входом третього нормуючого підсилювача 14. Вхід датчика 1 UA 79320 U 5 10 15 20 25 струму 13 з'єднаний з третім виходом сервопривода 6, а вихід з входом четвертого нормуючого підсилювача 15. Система керування безпілотним літальним апаратом працює наступним чином. Під час польоту на перший вхід мультиплексора 2 через задавач 1 подається сигнал про задане значення кута тангажа або кутової швидкості тангажа, який порівнюється в обчислювачі з дійсним значенням кута тангажа або кутової швидкості тангажа. Якщо між цими сигналами є різниця, то сигнал з виходу мультиплексора 2 через аналого-цифровий перетворювач З надходить на вхід обчислювача 4. Сигнал з виходу обчислювача 4 через цифро-аналоговий перетворювач 5 іде на сервопривід 6, який перетворює сигнали керування у відповідні переміщення органів керування, які впливають на об'єкт керування 7, на першому виході якого маємо сигнал про задане значення кута тангажа, а на другому виході - сигнал про кутову швидкість тангажа. Сигнал про кутову швидкість тангажа передається з датчика кутової швидкості 8 на перший нормуючий підсилювач 10, а далі на другий вхід мультиплексора 2. Сигнал про діюче значення кута тангажа надходить з датчика кута 9 на другий нормуючий підсилювач 11, потім на третій вхід мультиплексора 2. Сигнал про значення напруги подається з другого виходу сервопривода 6 на датчик напруги 12, далі через третій нормуючий підсилювач 14 на четвертий вхід мультиплексора 2. Сигнал про діюче значення струму подається з третього виходу сервопривода 6 на датчик струму 13, далі через четвертий нормуючий підсилювач 15 на п'ятий вхід мультиплексора 2. Сигнал про діюче значення кута органу управління надходить з датчика кута тангажу 16 на шостий вхід мультиплексора 2. Сигнал про діюче значення кута органу управління надходить з датчика кута крена 17 на сьомий вхід мультиплексора 2. Таким чином, введення до системи додатково датчиків кута органу керування по тангажу та крену забезпечує зменшення тривалості перехідного процесу, а також забезпечує контроль відхилення органу керування на безпілотному літальному апараті. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 40 Система керування безпілотним літальнім апаратом, яка містить послідовно з'єднані задавач, мультиплексор, аналого-цифровий перетворювач, обчислювач, цифро-аналоговий перетворювач, сервопривід та об'єкт керування, другий вихід сервопривода через датчик напруги та третій нормуючий підсилювач з'єднаний з другим входом мультиплексора, третій вихід сервопривода через датчик струму та четвертий нормуючий підсилювач з'єднаний з третім входом мультиплексора, перший вихід об'єкта керування через датчик кутової швидкості та перший нормуючий підсилювач з'єднаний з четвертим входом мультиплексора, другий вихід об'єкта керування через датчик кута та другий нормуючий підсилювач з'єднаний з п'ятим входом мультиплексора, яка відрізняється тим, що до неї введені датчик кута органу керування по тангажу та датчик кута органу керування по крену, третій вихід об'єкта керування через датчик кута органу керування по тангажу з'єднаний з шостим входом мультиплексора, четвертий вихід об'єкта керування через датчик кута органу керування по крену з'єднаний з сьомим входом мультиплексора. 2 UA 79320 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюControl system of pilotless vehicle
Автори англійськоюKulik Anatolii Stepanovych, Firsov Serhii Mykolaiovych, Taranova Liudmyla Ihorivna
Назва патенту російськоюСистема управления беспилотным летательным аппаратом
Автори російськоюКулик Анатолий Степанович, Фирсов Сергей Николаевич, Таранова Людмила Игоревна
МПК / Мітки
МПК: B64C 13/00
Мітки: керування, безпілотним, апаратом, літальним, система
Код посилання
<a href="https://ua.patents.su/5-79320-sistema-keruvannya-bezpilotnim-litalnim-aparatom.html" target="_blank" rel="follow" title="База патентів України">Система керування безпілотним літальним апаратом</a>
Система керування безпілотним літальним апаратом
Номер патенту: 54022
Опубліковано: 25.10.2010
Автори: Назарова Анастасія Олександрівна, Бандура Іван Миколайович, Симонов Володимир Федорович
МПК: B64C 13/00
Мітки: система, безпілотним, літальним, апаратом, керування
Формула / Реферат:
Система керування безпілотним літальним апаратом, що складається з послідовно з'єднаних підсилювача, рульової машини, керма висоти, безпілотного літального апарата, а також пристрою зворотного зв'язку, вхід якого з'єднаний з першим виходом рульової машини, швидкісного гіроскопа, вхід якого з'єднаний з виходом безпілотного літального апарата, гіровертикалі, вхід якої з'єднаний з виходом безпілотного літального апарата, висотоміра, вхід якого...
Система керування літальним апаратом
Номер патенту: 36519
Опубліковано: 27.10.2008
Автори: Симонов Володимир Федорович, Бандура Іван Миколайович, Полторацька Маргарита Миколаївна
МПК: B64C 13/00, G05D 1/03
Мітки: літальним, апаратом, система, керування
Формула / Реферат:
Система керування літальним апаратом, що містить важіль керування, завантажувальну пружину, датчик кутового положення важеля керування, обчислювач, сервопривід керма висоти, кермо висоти, датчик кута тангажа, датчик кутової швидкості та датчик кутового прискорення літального апарата, перший диференціюючий пристрій, другий диференціюючий пристрій, яка відрізняється тим, що до її складу введені перший аналого-цифровий перетворювач, вхід якого...
Система керування безпілотним літальним апаратом
Номер патенту: 55410
Опубліковано: 10.12.2010
Автори: Фірсов Сергій Миколайович, Таранова Світлана Ігорівна, Нгуен Ван Тхінь, Кулік Анатолій Степанович
МПК: B64C 21/00
Мітки: літальним, система, безпілотним, керування, апаратом
Формула / Реферат:
Система керування безпілотним літальним апаратом, яка містить пристрій управління, електричний привід, вхід якого з'єднаний з виходом пристрою управління, датчик кутової швидкості, з'єднаний з першим входом пристрою управління, датчик кута, з'єднаний з другим входом пристрою управління, магнітний курс, висотомір, GPS, виходи яких підключені до третього, четвертого, пятого входів пристрою управління відповідно, яка відрізняється тим, що в неї...
Система керування безпілотним літальним апаратом
Номер патенту: 46179
Опубліковано: 10.12.2009
Автори: Кулік Анатолій Степанович, Гусарова Ганна Григорівна, Фірсов Сергій Миколайович, До Куок Туан
МПК: B64C 21/00
Мітки: безпілотним, керування, апаратом, система, літальним
Формула / Реферат:
Система керування безпілотним літальним апаратом, яка містить пристрій управління, електричний привід, з'єднаний з виходом пристрою управління, датчик кутової швидкості, з'єднаний з першим входом пристрою управління, датчик кута, з'єднаний з другим входом пристрою управління, яка відрізняється тим, що в неї введені магнітний курс, висотомір, GPS, виходи яких підключені до третього, четвертого, п'ятого входів пристрою управління...
Система керування безпілотним літальним апаратом
Номер патенту: 58103
Опубліковано: 25.03.2011
Автори: Фірсов Сергій Миколайович, Нгуєн Ван Тхінь, Данченко Олександр Вячеславович, Кулік Анатолій Степанович, Прийменко Катерина Сергіївна
МПК: B64C 21/00
Мітки: безпілотним, система, літальним, керування, апаратом
Формула / Реферат:
Система керування безпілотним літальним апаратом, що містить пристрій управління, електричний привід, з'єднаний з виходом пристрою управління, магнітний курс, висотомір, перший GPS приймач, виходи яких підключені до першого, другого, третього входів пристрою управління відповідно, яка відрізняється тим, що в неї введені перший модуль бездротового зв'язку, вихід якого з'єднаний з четвертим входом пристрою управління, а вхід з'єднаний з другим...
Попередній патент: Модуль управління плавним включенням симісторів
Наступний патент: Система для перетворення енергії хвиль в електричну енергію
Випадковий патент: Керамічний антифрикційний матеріал на основі дибориду цирконію