Енкаітне евольвентне зубчасте зачеплення попова о.п.
Формула / Реферат
Зубчасте зачеплення, що складається з ведучого та веденого зубчастих коліс з розташованими на них евольвентними зубами, які знаходяться між собою у зачепленні, яке відрізняється тим, що бічні профілі ніжок зубів коліс окреслені енкаітними кривими, отриманими шляхом подвійного повороту початкових бічних профілів ніжок зубів, що являють собою опуклі дуги кіл, відносно центрів обертання зубчастих коліс і відносно лінії зачеплення, причому радіуси кривизни ![]() і
і ![]() будь-яких точок енкаітних кривих є постійними величинами з центрами кривизни, що не збігаються, розташованими поза лінією зачеплення, за винятком точок, співпадаючих з полюсом зачеплення, і вони визначаються з виразів:
будь-яких точок енкаітних кривих є постійними величинами з центрами кривизни, що не збігаються, розташованими поза лінією зачеплення, за винятком точок, співпадаючих з полюсом зачеплення, і вони визначаються з виразів:
![]()
де ![]() =1,5...2,25 - коефіцієнт;
=1,5...2,25 - коефіцієнт; ![]() - модуль зачеплення;
- модуль зачеплення; ![]() - числа зубів ведучого та веденого зубчастих коліс;
- числа зубів ведучого та веденого зубчастих коліс; ![]() - кут зачеплення, що приймається рівним 20°.
- кут зачеплення, що приймається рівним 20°.
Текст
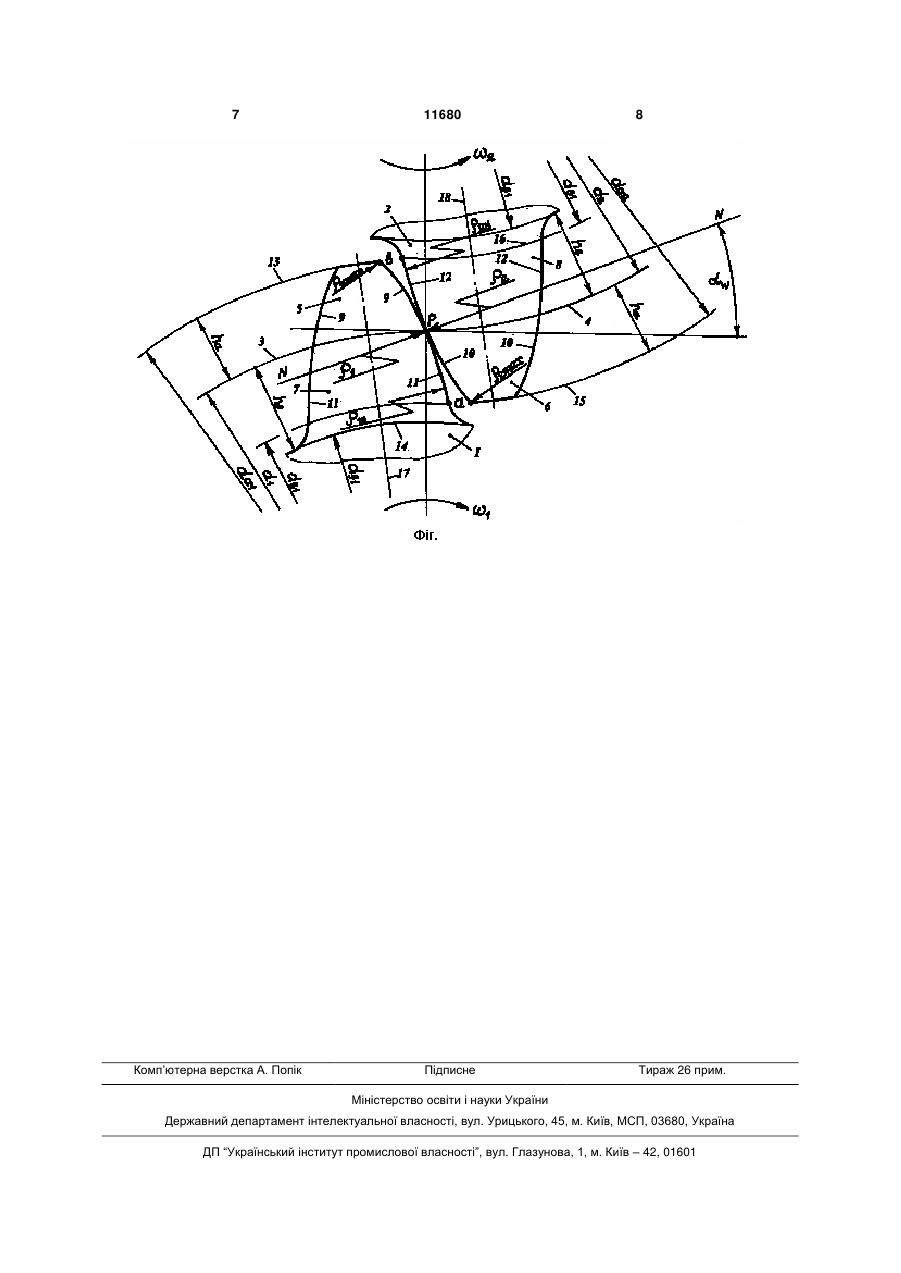
Зубчасте зачеплення, що складається з ведучого та веденого зубчастих коліс з розташованими на них евольвентними зубами, які знаходяться між собою у зачепленні, яке відрізняється тим, що бічні профілі ніжок зубів коліс окреслені енкаітними кривими, отриманими шляхом подвійного повороту початкових бічних профілів ніжок зубів, що являють собою опуклі дуги кіл, відносно центрів обертання зубчастих коліс і відносно лінії зачеплення, причому радіуси кривизни ρ1H і ρ2H будьяких точок енкаітних кривих є постійними величинами з центрами кривизни, що не збігаються, розташованими поза лінією зачеплення, за винятком точок, співпадаючих з полюсом зачеплення, і вони визначаються з виразів: ρ1H kmz1sinα w ; ρ2H kmz 2sinα w , Корисна модель відноситься до галузі машинобудування. Відомо зубчасте зачеплення, що складається із ведучого та веденого зубчастих колес з розташованими на них евольвентними зубами, які шляхом взаємодії між собою здійснюють передачу обертання та навантаження від одних валів іншим валам машин і механізмів [1]: Кудрявцев В.Н., Державец Ю.А., Глухарев Е.Г. Конструкция и расчѐт зубчатых передач редукторов. - Л.: Машиостроение, 1971. - 328с. Недоліком вказаного зачеплення є дуже високі контактні напруження на вході і на виході зубів із зачеплення, які суттєво перевищують напруження в полюсі зачеплення. Найбільш близьким за технічною сутністю до запропонованого рішення є прийняте за прототип зубчасте зачеплення, що складається із ведучого та веденого зубчастих колес з розташованими на них корегованими евольвентними зубами, які знаходяться між собою в зачепленні [2]: Громан М.Б. Подбор коррекций зубчатых передач. - М.: Вестник машиностроения, 1955, №2. Недоліком вказаного зачеплення є незначне підвищення (до 20%) навантажувальної здатності евольвентних зубчастих передач редукторів. Задача корисної моделі - зниження максимальних величин контактних напружень на вході, виході зубів із зачеплення і в полюсі зачеплення, підвищення навантажувальної здатності та ефективності роботи зубчастого зачеплення. Для вирішення задачі в зубчастому зачепленні, яке складається із ведучого та веденого зубчастих колес з розташованими на них евольвентними зубами, бічні профілі ніжок зубів колес окреслені енкаітними кривими, отриманими шляхом подвійного повороту початкових бічних профілів ніжок зубів, що являють собою опуклі дуги кіл, відносно центрів обертання зубчастих колес і відносно лінії зачеплення, причому радіуси кривизни 1H і 2H будь-яких точок енкаітних кривих є постійними величинами з центрами кривизни, що не збігаються, розташованими поза лінією зачеплення, за винятком точок, співпадаючих з полюсом зачеплення, і вони визначаються з виражень: 1Н=кmz1sin W; 2Н=кmz2sin W, де к=1,5...2,25 - коефіцієнт ; m - модуль зачеплення; z1, z2 - числа зубів ведучого та веденого зубчастих колес; W - кут зачеплення, що приймається рівним 20°. Порівняльний аналіз з прототипом показує, що зубчасте зачеплення, яке заявляється, відрізняється тим, що бічні профілі ніжок зубів колес окреслені енкаітними кривими, отриманими шляхом подвійного повороту початкових бічних профілів де k =1,5...2,25 - коефіцієнт; m - модуль зачеплення; z1, z2 - числа зубів ведучого та веденого (19) UA (11) 11680 (13) U зубчастих коліс; α w - кут зачеплення, що приймається рівним 20°. 3 ніжок зубів, що являють собою опуклі дуги кіл, відносно центрів обертання зубчастих колес і відносно лінії зачеплення, причому радіуси кривизни 1H и 2H будь-яких точок енкаітних кривих є постійними величинами з центрами кривизни, що не збігаються, розташованими поза лінією зачеплення, за винятком точок, співпадаючих з полюсом зачеплення, і вони визначаються із вище приведених рівнянь. Порівняння технічного рішення, що заявляється, не лише з прототипом, але й з іншими технічними рішеннями в даній галузі техніки, не виявило в них ознак, які б відрізняли технічне рішення, що заявляється, від прототипу, а це дозволяє зробити висновок про відповідність критерію "винахідницький рівень". На фіг. зображена спряжена пара зубів в полюсі зачеплення запропонованого зубчастого зачеплення. У відповідності з фіг. маємо: d1 і d2, da1 і da2, df1 і df2, db1 і db2 - діаметри ділильних кіл ведучого та веденого зубчастих колес, кіл вершин й западин зубів, основних кіл; ha, hf - висота голівок і висота ніжок зубів; 1 і 2 - радіуси кривизни евольвентних кривих в полюсі зачеплення зубів; 1max, 2max максимальні радіуси кривизни евольвентних кривих; 1H , 2H - радіуси кривизни енкаітних кривих; W - кут зачеплення; NN - лінія зачеплення; точка р - полюс зачеплення. Енкаітною кривою називається крива, яка є геометричним місцем точок, отриманих шляхом подвійного повороту початкових профілів зубів у вигляді опуклих і ввігнутих дуг кіл, еліптичних кривих, прямих та інших ліній, відносно центрів обертання передбачуваних зубчастих колес і відносно лінії зачеплення [3]: Д.п. №55868А на винахід. Україна. Зубчасте зачеплення Попова О.П. Попов О.П. 2002075766; Заявл. 12.07.2002; Опубл. 15.04.2003. Бюл. №4; [4]: Д.п. №59839А на винахід. Україна. Зубчаста передача Попова О.П. Попов О.П. 20021210462; Заявл. 23.12.2002; Опубл. 15.09.2003. Бюл. №9; [5]: Д.п. №62233А на винахід. Україна. Енкаітна зубчаста передача Попова О.П. Попов О.П. - 2003021006; Заявл. 05.02.2003; Опубл. 15.12.2003. Бюл. №12; [6]: Попов А.П. Нагрузочная способность энкаитных зубчатых передач по контактным напряженим // Сб. докл. Междунар. науч.-техн. конф. Вести, национал, техн. университета "ХПИ". - Харьков, 2004, №3. С.61-68. Зубчасте зачеплення складається із ведучого та веденого зубчастих колес з розташованими на них зубами 1 і 2. Ділильні кола 3 і 4 ділять зуби 1 і 2 по висоті на голівки 5, 6 висотою ha і ніжки 7, 8 висотою hf. Голівки 5 і 6 зубів мають евольвентні бічні профілі 9 і 10, а бічні профілі ніжок 7 і 8 окреслені енкаітними кривими 11 і 12. Евольвентні криві 9 і 10 голівок зубів мають в полюсі зачеплення (точка р) радіуси кривизни 1 і 2, а на вершинах зубів - 1max , 2max. Енкаітні криві 11 і 12 ніжок зубів у кожній точці мають радіуси кривизни 1H і 2H. Центри кривизни точок енкаітних кривих 11 і 12 віддалені від вказаних кривих на відстані 1H і 2H. При цьому кожний із радіусів характеризується 11680 4 різними положеннями центрів кривизни, розташованих поза лінією зачеплення NN, виключаючи полюс зачеплення. В полюсі зачеплення центри кривизни енкаітних кривих розташовуються на лінії зачеплення NN, у зв'язку із чим радіуси 1H і 2H у цьому випадку збігаються з лінією зачеплення. Висота h кожного зуба, що дорівнює ha+hf, укладена між дугами кіл 13 і 14 або 15 і 16 виступів і западин зубів. Прямі лінії 17 і 18 є лініями симетрії зубів. Для знаходження максимальних величин контактних напружень на вході зубів в зачеплення використовуються залежності [7]: Попов А.П., Попова Л.А. Исследование максимальных контактных напряжений в зацеплении эвольвентных зубьев // 36. наук. праць УДМТУ. - Миколаїв, 2002, №4 (382). С.109-108: H 0,5915 m C(1 (1 2 m )EFn ; (1) bw a 1 1/ C), (2) де m=Δ/b0 - коефіцієнт, що визначається формулою (2); Δ - допуск в "-" на радіус вершин зубів; b0 напівширина площадки контакту; Е - модуль пружності матеріалів зубів; Fn - нормальна сила, діюча на спряжену пару зубів; bW - довжина зубів; С безрозмірний параметр, що визначається виразом C 0,216 2b WE ; aFn a - приведений радіус кривизни зубів на вході у зачеплення. Стосовно традиційного евольвентного зубчастого зачеплення радіус a має вигляд 1min 2 max a 1min де 1min 2 max , (3 ) 2 max 0,5m[( z1 z2 ) sin 2 2 ra1 rb1 W ( z2 2)2 z2 cos2 2 W ], - мінімальний і максимальний радіуси кривизни спряженої пари зубів; m - модуль зачеплення; z1, z2 - числа зубів ведучого та веденого зубчастих колес; W - кут зачеплення; ra1=m(z2+2)/2 - радіус кола вершин зубів; rb1=mz1cos W/2 - радіус основного кола. При визначенні радіуса a= a* у запропонованому енкаітно-евольвентному зачепленні необхідно у формулі (3) замість радіуса 1min підставити радіус 1H, що характеризує кривизну енкаітної кривої ніжки зуба ведучого колеса, і який визначається з виразу 1H= (1,5...2,25)mz1 sin W. Вираз коефіцієнта H, який характеризує підвищення навантажувальної здатності по контактним напруженням запропонованого зубчастого зачеплення у порівнянні з традиційним евольвентним зубчастим зачепленням, має вигляд [6]: Попов А.П. Нагрузочная способность энкаитных зубчатых передач по контактным напряженим // Сб. докл. Междунар. науч.-техн. конф. Вести, национал, техн. университета "ХПИ". - Харьков, 2004, №3. С.61-68. 5 2 пр.1 H 4 пр.2 , ( 4) пр де пр= 1 2/( 1+ 2) - приведений радіус кривизни спряжених евольвентних зубів у полюсі зачеплення; 1=mz1sinaW/2, 2=mz2sinaW/2 - радіуси кривизни евольвентних кривих у полюсі зачеплення; пр.1= 1Н 2/( 1Н+ 2), пр.2= 1 2Н/( 1+ 2Н) - приведені радіуси, що характеризують приведену кривизну енкаітних і евольвентних кривих запропонованого зачеплення у полюсі зачеплення; 2Н=(0,75...1,25)mz2sin W - радіус кривизни енкаітної кривої ніжки зуба веденого колеса. Для оцінки ефективності запропонованого зубчастого зачеплення виконаємо розрахунки одноступінчатої передачі редуктора зовнішнього зачеплення з прямими зубами, виходячи з z1=50; z2=100; 0 m=5мм; bW=125мм; Fn= 4 104H; W=20 ; 5 E=2,1 10 МПа; Δ=0; 0,05; 0,10; 0,15; 0,20мм. По наведених формулах знаходимо 1=42,75мм; 2=85,5мм; пр=28,5мм; 1min=29,253мм; 2max=55,62мм; 1H=160,312мм; 2H=320,624мм; * a=19,17мм; a =41,293мм. Потім по формулі (2) при Δ=0; 0,05; 0,10; 0,15 і 0,20мм і a=19,17мм визначаємо m=0; 0,155; 0,355; 0,606 і 0,914, а по формулі (1) - відповідні m максимальні напруження H=1107; 1267; 1448; 1646 і 1862МПа. Аналогічним образом при * a =41,293мм знаходимо m=0; 0,1016; 0,223; 0,366 і 0,532, яким відповідають напруження H=754; 827; 906; 992; і 1083МПа. З порівняння напружень H=1107...1862МПа, знайдених для евольвентного зубчастого зачеплення, з напруженнями H=754...1083МПа, підрахованими для запропонованого зубчастого зачеплення, очевидно, що в енкаітно-евольвентному зачепленні напруження менші у порівнянні з евольвентним зубчастим зачепленням у 1107/754...1862/1083=1,468...1,719 рази, що еквівалентно підвищенню навантажувальній здатності 11680 6 зубів на вході в зачеплення у 1,4682...1,7192=2,15...2,95 рази. Виходячи з формули (4) при відомих значеннях пр., пр.1, пр.2 визначимо значення коефіцієнта H=1,625, виходячи з якого містимо, що навантажувальна здатність запропонованого зубчастого зачеплення у 1,625 рази вище навантажувальної здатності традиційного зубчастого зачеплення. Таким чином, приведені розрахунки підтвердили дуже високу ефективність енкаітно-евольвентного зачеплення при вході (виході) зубів в зачеплення і у полюсі зачеплення. Зубчасте зачеплення працює наступним чином. Внаслідок обертання ведучого зубчастого колеса з кутовою швидкістю 1 зуб 1, що належить цьому колесу і має контакт в полюсі зачеплення (точка р) із зубом 2 веденого зубчастого колеса, впливаючи на зуб 2 таким чином, що ведене зубчасте колесо набуває кутову швидкість 2. При цьому бічний профіль зуба 1, описаний евольвентною кривою 9 (голівка 5) і енкаітною кривою 11 (ніжка 7), буде з ковзанням обкатуватися по бічному профілю зуба 2, який містить евольвентну 10 та енкаітну 12 криві, що належать голівці 6 і ніжці 7 зуба веденого колеса, доти, поки спряжена пара зубів 1 і 2 не вийде із зачеплення. Останньою точкою контакту при виході зубів із зачеплення буде точка b, а при вході зубів у зачеплення - точка а. Економічний ефект від впровадження запропонованого технічного рішення варто очікувати за рахунок підвищення навантажувальної здатності та ефективності роботи зачеплення. Суспільна корисність технічного рішення, що заявляється, полягає в поліпшенні віброакустичих характеристик зачеплення внаслідок зниження шуму і вібрацій (промсанітарія) за рахунок покращення умов змащення, обумовлених великою площадкою контакту мастильного шару. 7 Комп’ютерна верстка А. Попік 11680 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPopovs involute gearing
Автори англійськоюPopov Oleksii Pavlovych
Назва патенту російськоюЭнкаитное эвольвентное зубчатое зацепление попова a.п.
Автори російськоюПопов Алексей Павлович
МПК / Мітки
МПК: F16H 1/00
Мітки: зачеплення, зубчасте, о.п, енкаітне, попова, евольвентне
Код посилання
<a href="https://ua.patents.su/4-11680-enkaitne-evolventne-zubchaste-zacheplennya-popova-op.html" target="_blank" rel="follow" title="База патентів України">Енкаітне евольвентне зубчасте зачеплення попова о.п.</a>
Зубчасте зачеплення попова о.п. з поздовжньо модифікованими зубами
Номер патенту: 5641
Опубліковано: 15.03.2005
Автор: Попов Олексій Павлович
МПК: F16H 1/00
Мітки: зачеплення, о.п, попова, поздовжньої, зубами, зубчасте, модифікованими
Формула / Реферат:
Зубчасте зачеплення з поздовжньо модифікованими зубами, яке складається з ведучого і веденого зубчастих коліс з розташованими на них зубами, які містять евольвентні ніжки та неевольвентні головки, які знаходяться в зачепленні між собою, яке відрізняється тим, що бічні профілі ділянок зубів веденого зубчастого колеса, які прилеглі до їх вершин, у межах висоти виконані у...
Евольвентне зубчасте зачеплення з профільно модифікованими зубами
Номер патенту: 11132
Опубліковано: 15.12.2005
Автор: Попов Олексій Павлович
МПК: F16H 1/00
Мітки: зачеплення, евольвентне, модифікованими, зубами, профільної, зубчасте
Формула / Реферат:
Евольвентне зубчасте зачеплення з профільно модифікованими зубами, що складається із ведучого та веденого зубчастих коліс з розташованими на них евольвентними зубами, які знаходяться між собою у зачепленні, яке відрізняється тим, що на ділянках зубів зубчастих коліс, віддалених від протилежних торцевих перерізів на відстань , твірні бічних поверхонь зубів виконані...
Зубчаста передача попова о.п. з точковою системою зачеплення евольвентних зубів
Номер патенту: 11441
Опубліковано: 15.12.2005
Автор: Попов Олексій Павлович
МПК: F16H 1/00
Мітки: о.п, зубів, зубчаста, системою, точковою, евольвентних, передача, попова, зачеплення
Формула / Реферат:
Зубчаста передача, яка складається з ведучого і веденого зубчастих коліс з розташованими на них евольвентними зубами, які взаємодіють одне з одним по лінії контакту, яка відрізняється тим, що в результаті заміни прямолінійних твірних бічних поверхонь зубів ведучого зубчастого колеса криволінійними твірними з радіусом кривизни R виконана точкова система зачеплення зубів, при цьому радіус R при перекосі зубів на кут Ψ і при відсутності...
Зубчасте зачеплення попова о.п.
Номер патенту: 55868
Опубліковано: 15.04.2003
Автор: Попов Олексій Павлович
МПК: F16H 1/00
Мітки: о.п, попова, зачеплення, зубчасте
Формула / Реферат:
Зубчасте зачеплення, що містить ведуче та ведене зубчасті колеса з розташованими на них зубами, що знаходяться в зачепленні між собою, яке відрізняється тим, що зуби виготовлені з евольвентних ніжок та неевольвентних головок, причому бокові профілі головок зубів отримані шляхом зменшення товщини початкових головок зубів по всій висоті з боковими профілями, які окреслені радіусами кривизни ρ11 і ρ22, розташованими на лінії...
Зубчасте зачеплення
Номер патенту: 62400
Опубліковано: 15.12.2003
Автори: Форносов Єгор Юрійович, Лученков Єгор Євгенович, Попов Олексій Павлович, Попова Лариса Олексієвна, Романовський Георгій Федорович
МПК: F16H 1/00
Мітки: зубчасте, зачеплення
Формула / Реферат:
Зубчасте зачеплення, яке складається з ведучого та веденого зубчастих коліс з розташованими на них евольвентними зубами, які знаходяться в зачепленні між собою, яке відрізняється тим, що бічні профілі головок зубів на відстані = 0,25m від полюса зачеплення виконані у вигляді кривих, що характеризуються у довільно взятих точках постійними радіусами кривизни
Попередній патент: Спосіб визначення оптимальної частоти перетворення імітансу потенційно нестійкого чотириполюсника
Наступний патент: Спосіб фітозакріплення поверхні хвостосховищ
Випадковий патент: Транспортний засіб для транспортування контейнерів