Пристрій управління транспортним засобом
Номер патенту: 11692
Опубліковано: 25.12.1996
Автори: Барановський Павло Петрович, Бондарев Євгеній Ілліч, Орєхов Арсеній Петрович
Формула / Реферат
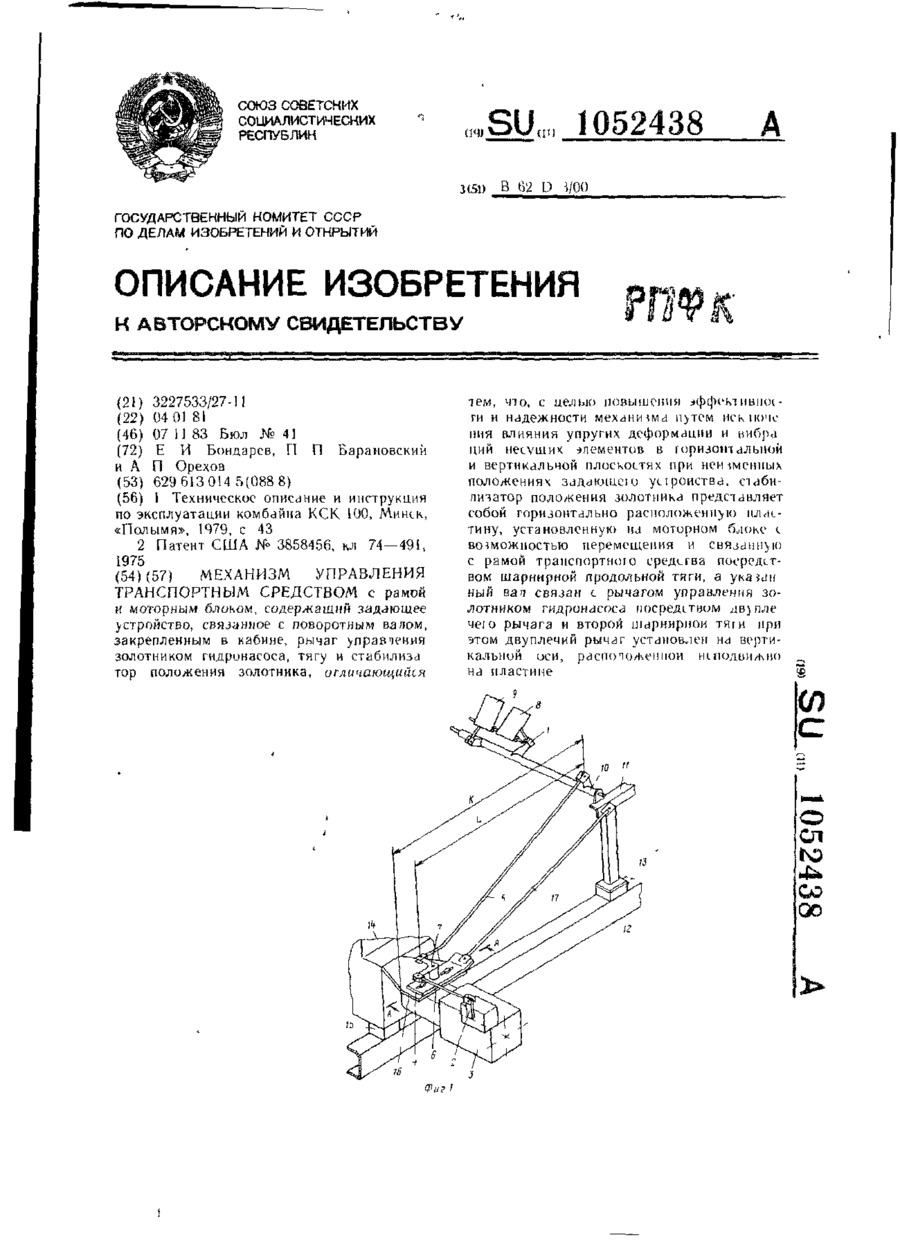
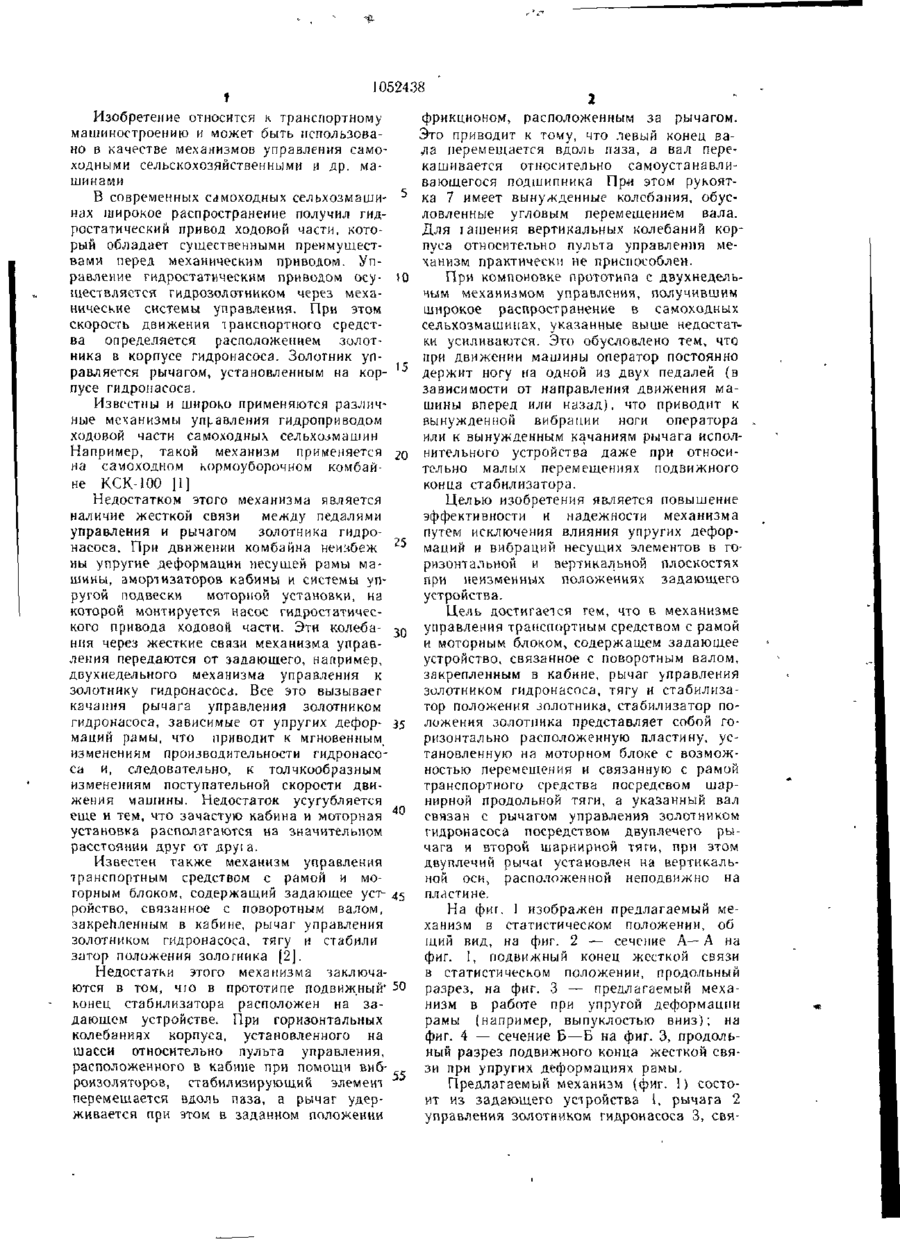
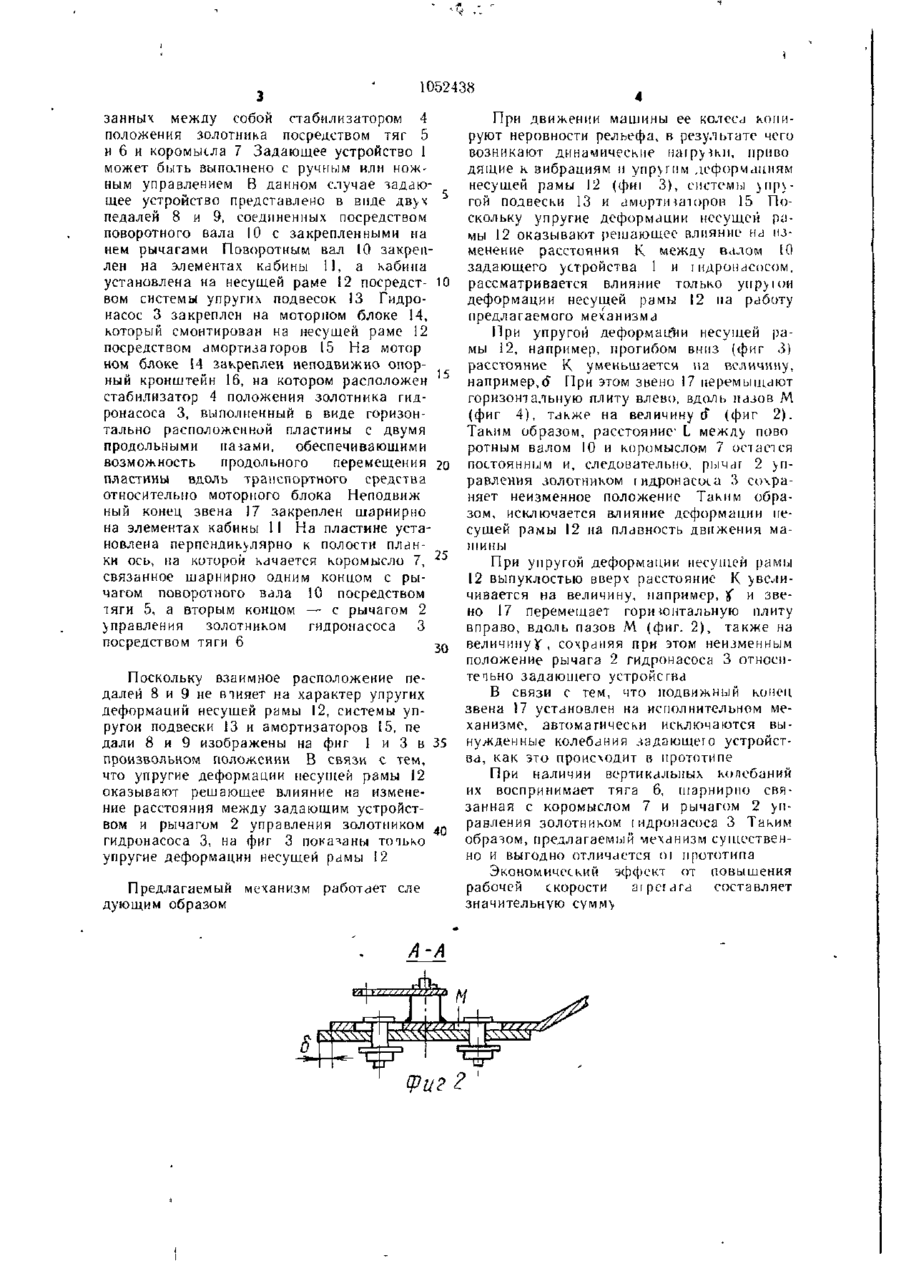
Механизм управления транспортным средством с рамой и моторным блоком, содержащий задающее устройство, связанное с поворотным валом, закрепленным в кабине, рычаг управления золотником гидронасоса, тягу и стабилизатор положения золотника, отличающийся тем, что, с целью повышения эффективности и надежности механизма путем исключения влияния упругих деформаций и вибраций несущих элементов в горизонтальной и вертикальной плоскостях при неизменных положениях задающего устройства, стабилизатор положения золотника представляет собой горизонтально расположенную пластину, установленную на моторном блоке с возможностью перемещения и связанную с рамой транспортного средства посредством шарнирной продольной тяги, а указанный вал связан с рычагом управления золотником гидронасоса посредством двуплечего рычага и второй шарнирной тяги, при этом двуплечий рычаг установлен на вертикальной осп, расположенной неподвижно на пластине.
Текст
МЕХАНИЗМ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ с рамой и моторным блоком, содержащий задающее устройство, связанное с поворотным валом, закрепленным в кабине, рычаг у прав тения золотником гидронасоса, тягу и стабилиза тор положения золотника, отличающийся ТЄМ, ЧТО, С ц е л Ы О ПОВЫШСПИЯ ^ ф ф е м ИВЛО1 ги и надежности механизма и>тсм иск поме ния влияния упругих деформации и нибра ций несущих элементов в горизонт алыюй и вертикальной плоскостях при неизменных положениях задающею устройства, стабилизатор положения золотника представляет собой горизонтально расположенную шыетину, установленную нл моторном блоке t возможностью перемещения и связанною с рамой транспортного средства посредством шарнирной продольной тяги, а указан ный вап связан с рычагом управления золотником гидронасоса посредством дв}пле ч е т рычага и второй шарнирной тяіи при этом двуплечий рычаг установлен на вертикальной оси, расположенной неподвижно на пластине ел ОО 1052438 t Изобретение относится к транспортному фрикционом, расположенным за рычагом. машиностроению и может быть использоваЭто приводит к тому, что левый конец вано в качестве механизмов управления самола перемещается вдоль паза, а вал переходными сельскохозяйственными и др. макашивается относительно самоустанавлишинами вающегося подшипника Пр-и этом рукоятВ современных самоходных сельхозмаши- 5 ка 7 имеет вынужденные колебания, обуснах широкое распространение получил гидловленные угловым перемещением вала. ростатический привод ходовой части, котоДля гашения вертикальных колебаний коррый обладает существенными преимущестпуса относительно пульта управления мевами перед механическим приводом. Упханизм практически не приспособлен. равление гидростатическим приводом осу- )0 При компоновке прототипа с двухнедельществляется гидрозолотником через механым механизмом управления, получившим нические системы управления. При этом широкое распространение в самоходных скорость движения транспортного средстсельхозмашинах, указанные выше недостатва определяется расположением золотки усиливаются. Это обусловлено тем, что ника в корпусе гидронасоса. Золотник уппри движении машины оператор постоянно равляется рычагом, установленным на кордержит ногу на одной из двух педалей (в пусе гидронасоса. зависимости от направления движения машины вперед или назад), что приводит к Известны и широко применяются различвынужденной вибрации ноги оператора ные механизмы управления гидроприводом или к вынужденным качаниям рычага неполходовои части самоходных сельхозмашин Например, такой механизм применяется 20 нительного устройства даже при относина самоходном кормоуборочном комбайтельно малых перемещениях подвижного не КСК-100 [I] конца стабилизатора. Недостатком этого механизма является Целью изобретения является повышение наличие жесткой связи между педалями эффективности и надежности механизма управления и рычагом золотника гидропутем исключения влияния упругих дефорнасоса. При движении комбайна неизбеж маций и вибраций несущих элементов в гоны упругие деформации несущей рамы марюонтальной и вертикальной плоскостях шины, амортизаторов кабины и системы уппри неизменных положениях задающего ругой подвески моторной установки, на устройства. которой монтируется насос гидростатичесЦель достигается гем, что в механизме кого привода ходовой части. Эти колебауправления транспортным средством с рамой ния через жесткие связи механизма управи моторным блоком, содержащем задающее ления передаются от задающего, например, устройство, связанное с поворотным валом, двухнедельного механизма управления к закрепленным в кабине, рычаг управления золотнику гидронасоса. Все это вызывает золотником гидронасоса, тягу и стабилизакачания рычага управления золотником тор положения золотника, стабилизатор погидронасоса, зависимые от упругих дефор- з 5 ложен и я золотника представляет собой гомации рамы, что приводит к мгновенным, ризонтально расположенную пластину, усизменениям производительности гидронасотановленную на моторном блоке с возможса и, следовательно, к толчкообразным ностью перемещения и связанную с рамой изменениям поступательной скорости двитранспортного средства посредсвом шаржения машины. Недостаток усугубляется нирной продольной тяги, а указанный вал еще и тем, что зачастую кабина и моторная 40 связан с рычагом управления золотником установка располагаются на значительном гидронасоса посредством двуплечего рырасстоянии друг от друїа. чага и второй шарнирной тяги, при этом Известен также механизм управления двуплечий рыча! установлен на вертикальтранспортным средством с рамой и моной оси, расположенной неподвижно на горным блоком, содержащий задающее уст- 45 пластине. На фиг. 1 изображен предлагаемый мероиство, связанное с поворотным валом, ханизм в статистическом положении, об закрепленным в кабине, рычаг управления щий вид, на фиг. 2 -— сечение А— А на золотником гидронасоса, тягу и стабили фиг. I, подвижный конец жесткой связи затор положения зологника [2]. в статистическом положении, продольный Недостатки этого механизма заключаются в том, чю в прототипе подвижный' 50 разрез, на фиг. 3 — предлагаемый механизм в работе при упругой деформации конец стабилизатора расположен на зарамы (например, выпуклостью вниз); на дающем устройстве. При горизонтальных фиг. 4 — сечение Б—Б на фиг. 3, продольколебаниях корпуса, установленного на ный разрез подвижного конца жесткой свяшасси относительно пульта управления, расположенного в кабине при помощи виб- . зи при упругих деформациях рамы. роизоляторов, стабилизирующий элемент Предлагаемый механизм (фиг. 1) состоперемещается вдоль паза, а рычаг удерит из задающего устройства І, рычага 2 живается при этом в заданном положении управления золотником гидронасоса 3, свя 1052438 занных между собой стабилизатором 4 положения золотника посредством тяг 5 и 6 и коромысла 7 Задающее устройство 1 может быть выполнено с ручным или ножным управлением В данном случае задающее устройство представлено в виде дв>ч педалей 8 и 9, соединенных посредством поворотного вала 10 с закрепленными на нем рычагами Поворотным вал 10 закреилен на элементах кабины 11, а кабина установлена на несущей раме 12 посредст- 10 вом системы упругих подвесок 13 Гидронасос 3 закреплен на моторном блоке 14, который смонтирован на несущей раме 12 посредством амортизаторов 15 На мотор ном блоке 14 закреплен неподвижно опорный кронштейн 16, на котором расположен 15 стабилизатор 4 положения золотника гидронасоса 3, выполненный в виде горизонтально расположенной пластины с двумя продольными пазами, обеспечивающими возможность продольного перемещения 20 пластины вдоль транспортного средства относительно моторного блока Неподвиж ный конец звена 17 закреплен шарнирно на элементах кабины 11 На пластине установлена перпендикулярно к полости планки ось, на которой качается коромысло 7, связанное шарнирно одним концом с рычагом поворотного вала 10 посредством тяги 5, а вторым концом — с рычагом 2 управления золотником гидронасоса 3 посредством тяги 6 30 При движении машины ее колеса копируют неровности рельефа, в результате чего возникают динамические нагрузки, прнво дящие к вибрациям н упр\гнм деформациям несущей рамы 12 (фиі 3), системи >пр\гой подвески 13 и аморти іаюрон 15 Поскольку упругие деформации несущей рамы 12 оказывают решающее влияние на изменение расстояния К между валом 10 задающего устройства 1 и і идронасосом, рассматривается влияние только упругой деформации несущей рамы І2 на работу предлагаемого механизма При упругой деформации несущей рамы 12, например, прогибом вниз (фиг 3) расстояние К уменьшается на величину, например,6 При этом звено 17 перемыщают горизонтальную плиту влево, вдоль пазов М (фиг 4), также на величину 6 (фиг 2). Таким образом, расстояние- L между пово ротным валом 10 и коромыслом 7 остается постоянным и, следовательно, рычаг 2 >правления золотником тидронаеоса 3 сохраняет неизменное положение Таким образом, исключается влияние деформации несущей рамы 12 на плавность движения машины При упругой деформации несущей рамы 12 выпуклостью вверх расстояние К увеличивается на величину, например, І и звено 17 перемещает горизонтальную плиту вправо, вдоль пазов М (фиг. 2), также на величину¥, сохраняя при этом неизменным положение рычага 2 гидронасоса 3 относитетьно задающего устройства Поскольку взаимное расположение пеВ связи с тем, что подвижный конец далей 8 и 9 не втияет на характер упругих звена 17 установлен на исполнительном медеформаций несущей рамы 12, системы упханизме, автоматически исключаются выругой подвески 13 и амортизаторов 15, пе дали 8 и 9 изображены на фиг 1 и 3 в 35 нужденные колебания задающего устройстпроизвольном положении В связи с тем, ва, как это происходит в прототипе что упругие деформации несущей рамы 12 При наличии вертикальных колебаний оказывают решающее влияние на изменеих воспринимает тяга 6, шарнирно свяние расстояния между задающим устройстзанная с коромыслом 7 и рычагом 2 >пвом и рычагом 2 управления золотником 4Q равления золотником гидронасоса 3 Таким г-ы тлг\і\ч ъгтхг-ъ 'І им Лиг Q пл1/'п.цм т п п і і. г-, П^ПЯЧПМ h Пґ->4 ПЯГЯРМІ.1И МРУЛНИЧМ Ґ ' У П К Ч ' Т Н Р Нобразом, предлагаемый механизм существенгидронасоса 3, на фиг 3 покачаны| тотько но и выгодно отличается оі прототипа упругие деформации несущей рамы 12 Экономический эффект от повышения Предлагаемый механизм работает еле рабочей скорости ai pet а га составляет дующим образом значительную сумм\ А-А Фи? 2 11 Фиг З Pt иктор Л Позхаи \ ik и 8771/14 Фиг Н Составитель А Барыков Техред И Верес Корректор Г Решетник Тираж Ь47 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035 Москва Ж—35 Раушская наб д 4/5 Филиал ППП «Патент» г Ужгород ул Проеьтная 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMechanism of control of transport facility
Автори англійськоюBondarev Yevhen Illich, Baranovskyi Pavlo Petrovych, Oriekhov Arsenii Petrovych
Назва патенту російськоюМеханизм управления транспортным средством
Автори російськоюБондарев Евгений Ильич, Барановский Павел Петрович, Орехов Арсений Петрович
МПК / Мітки
МПК: B62D 3/00
Мітки: засобом, пристрій, управління, транспортним
Код посилання
<a href="https://ua.patents.su/4-11692-pristrijj-upravlinnya-transportnim-zasobom.html" target="_blank" rel="follow" title="База патентів України">Пристрій управління транспортним засобом</a>
Пристрій управління гальмом транспортного засобу
Номер патенту: 7070
Опубліковано: 31.03.1995
Автор: Каменев Василь Ніонілович
МПК: B60T 7/00
Мітки: транспортного, пристрій, гальмом, засобу, управління
Формула / Реферат:
(57) Устройство управления тормозом транспортного средства, содержащее рычаг педали, установленный на оси в кронштейне с возможностью поворота, зубчатый элемент, выполненный на рычаге педали, собачку фиксации рычага педали и механизм ее привода, снабженный рукояткой, отличающееся тем, что головка собачки выполнена на рукоятке механизма привода, при этом устройство снабжено пружиной с V-образными концами, охватывающей с двух сторон головку...
Обладнання управління двигуном транспортного засобу
Номер патенту: 12197
Опубліковано: 25.12.1996
Автори: Каменев Василь Ніонілович, Ілющенко Микола Васильович
МПК: B60K 26/00
Мітки: транспортного, засобу, двигуном, обладнання, управління
Формула / Реферат:
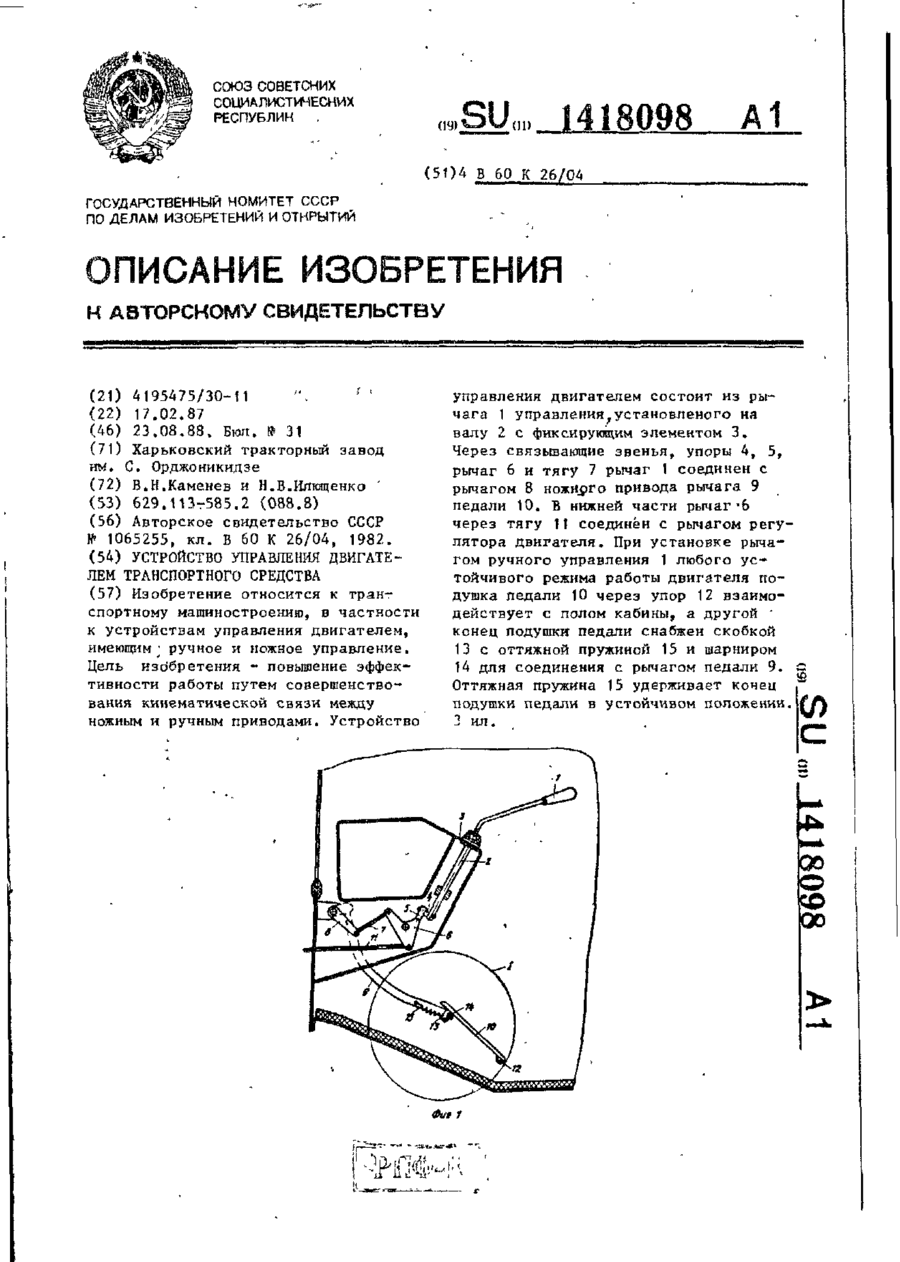
Устройство управлення двигателем транспортного средства, содержащее ручной привод с рычагом управления, установленным на валу и кинематически связанным системой тяг с рычагом регулятора двигателя, ножной привод с подвесной педалью, состоящей из подушки и рычага, кинематически связанного через систему тяг и рычагов с рычагом регулятора двигателя, отличающееся тем, что, с целью повышения эффективности работы путем совершенствования...
Пристрій управління коробкою передач транспортного засобу

Номер патенту: 1874
Опубліковано: 20.12.1994
Автори: Загорко Анатолій Георгійович, Пасевін Григорій Іванович
МПК: B60K 20/02
Мітки: управління, засобу, транспортного, пристрій, коробкою, передач
Формула / Реферат:
Устройство управлення коробкой передач транспортного средства, содержащее элемент управления, связанный кинематически со штоком, имеющим поводки для включения передач переднего и заднего ходов, причем поводок заднего хода расположен поворотно на корпусе, при этом оси штока и поводка заднего хода расположены взаимно перпендикулярно и связаны между собой посредством паза с боковыми сторонами разной ддины, выступа с лыской, обращенной к пазу,...
Пристрій для управління зчепленням та передачею транспортного засобу
Номер патенту: 1668
Опубліковано: 25.10.1994
Автор: Чутчев Микола Григорович
МПК: B60W 10/02, B60W 10/10
Мітки: пристрій, засобу, управління, зчепленням, передачею, транспортного
Формула / Реферат:
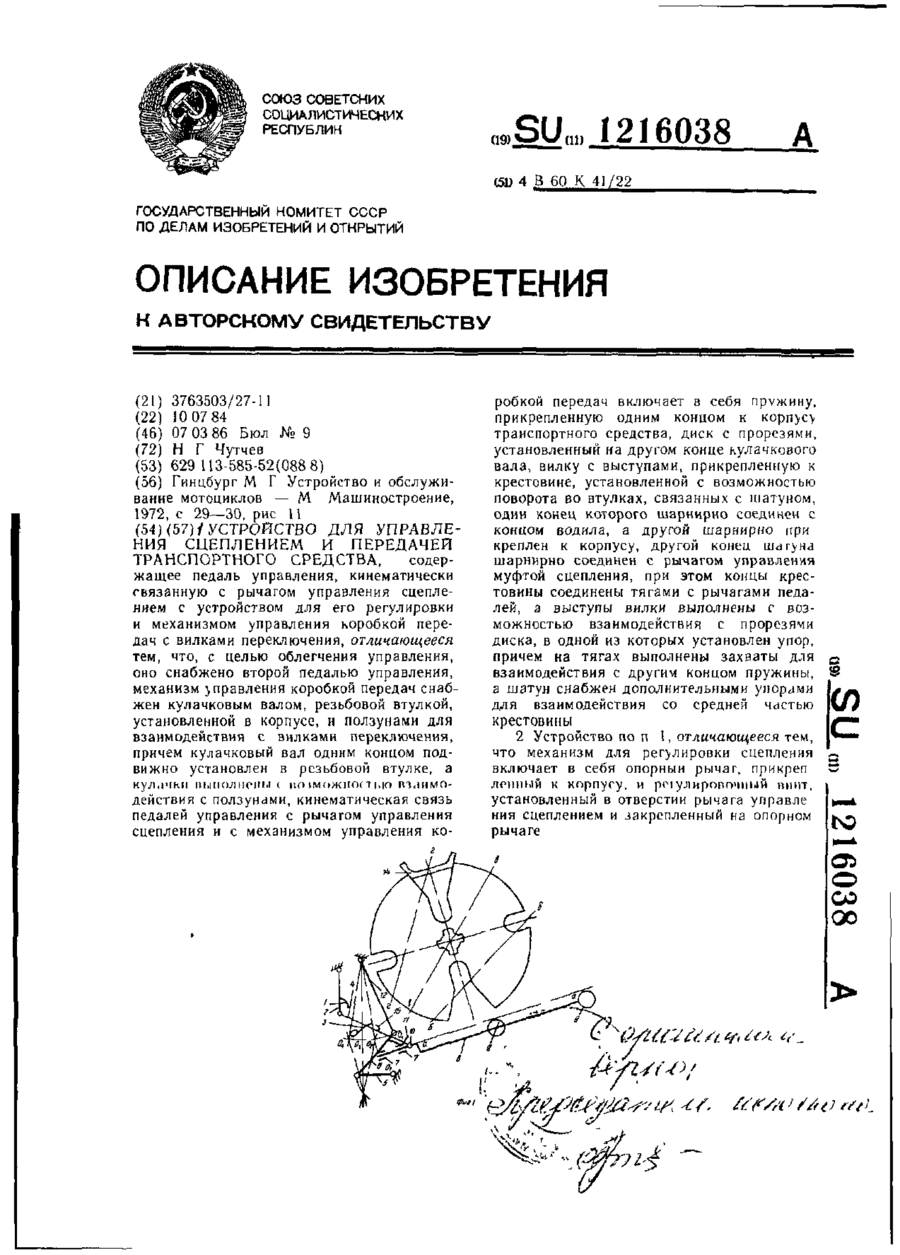
(57) Устройство для управления сцеплением и передачей транспортного средства, содержащее педаль управления, кинематически связанную с рычагом управления сцеплением с устройством для его регулировки и механизмом управления коробкой передач с вилками переключения, отличающееся тем, что, с целью облегчения управления, оно снабжено второй педалью управления, механизм управления коробкой передач снабжен кулачковым валом, резьбовой втулкой,...
Пристрій для управління самохідною сільськогосподарською машиною
Номер патенту: 9166
Опубліковано: 30.09.1996
Автори: Покуса Олексій Олександрович, Збарський Борис Абрамович, Завгородній Віталій Євгенійович, Константиновський Михайло Йосипович, Умеренко Аркадій Аркадійович, Кузьмінов Вадим Георгійович
МПК: A01B 69/04
Мітки: машиною, сільськогосподарською, пристрій, управління, самохідною
Формула / Реферат:
1. Устройство для управления самоходной сельскохозяйственной машиной, содержащее насосную станцию, состоящую из насоса постоянной подачи, предохранительного клапана, фильтра и гидробака, у зел дистанционного управления, состоящий из рулевого колеса, распределителя, насоса-дозатора и обратного клапана, переключающий блок, замедлительные клапаны, гидроцилиндр, копирующий щуп, рычаг гидрораспределителя, гидрораспределитель, управляемые...
Попередній патент: Пристрій для стабілізації швидкості обертання ведучого вала стрічкопротяжного механізму магнітофона
Наступний патент: Система управління транспортним засобом
Випадковий патент: Магнітні наночастинки