Пристрій установки датчика
Номер патенту: 11879
Опубліковано: 16.01.2006
Автори: Лашко Леонід Олексійович, Войтович Володимир Романович, Антюхов Юрій Митрофанович, Чуприна Андрій Андрійович

Формула / Реферат
Пристрій установки датчика, що містить антену, закріплену на опорно-поворотному механізмі, установленому на основі, компас, пристрій введення інформації, датчик, ротор якого кінематично з'єднаний з антеною, а статор жорстко з'єднаний з основою, і суматор, один з входів якого з'єднаний з датчиком, а другий - з пристроєм введення інформації, який відрізняється тим, що корпус компаса в довільному положенні жорстко з'єднаний з основою, а з'єднання датчика з антеною стосовно компаса виконано так, що при напрямку оптичної осі антени і візирної осі компаса на той самий орієнтир показники датчика дорівнюють геометричній сумі ліченого по шкалі компаса азимутального кута між нульовим напрямком візування його на орієнтир, і азимутального кута між названим напрямком візування компаса і напрямком оптичної осі антени, причому нульовим напрямком компаса, що жорстко зв'язаний з корпусом, прийнятий такий напрямок, який збігається з напрямком меридіана на північ при нульовому показнику шкали компаса.
Текст
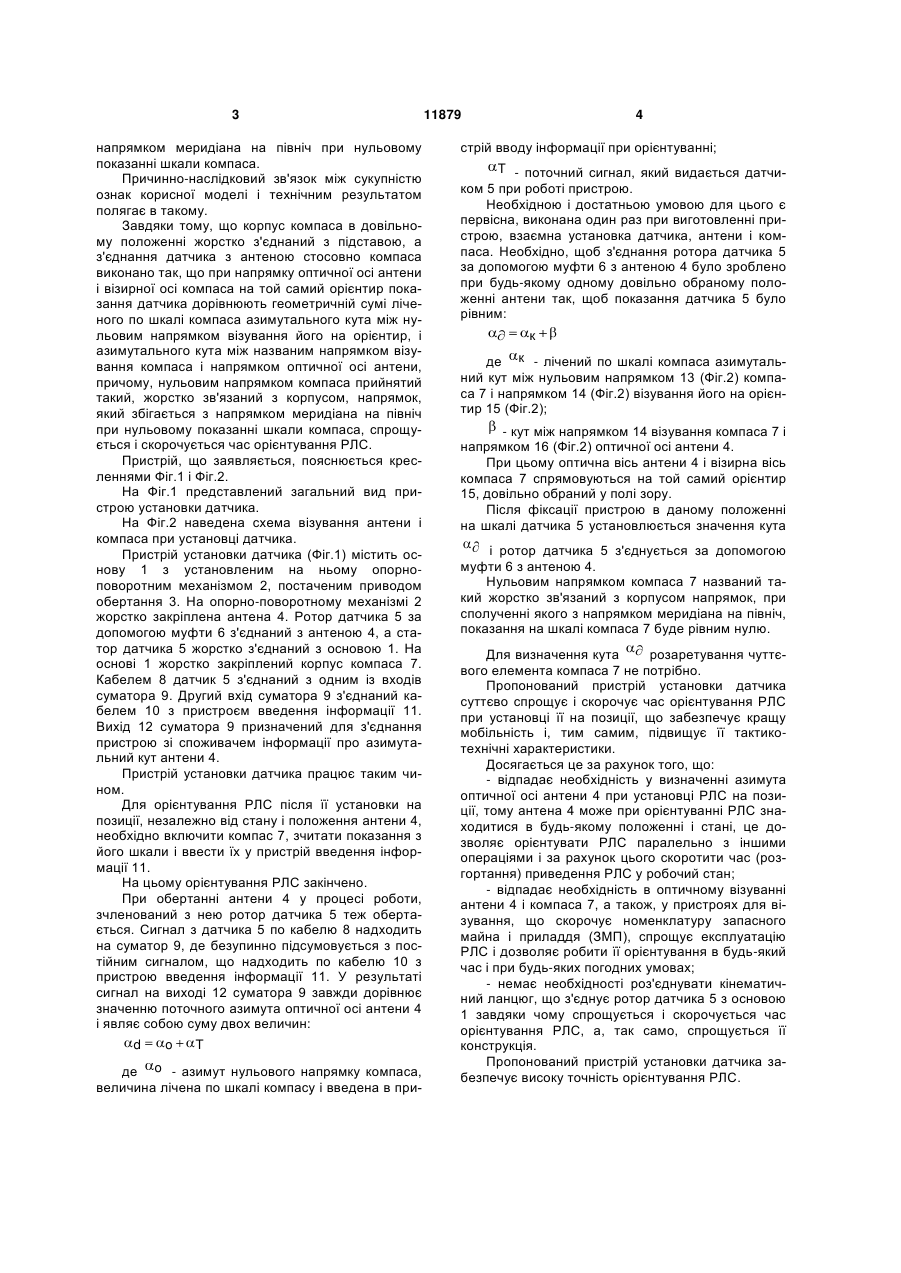
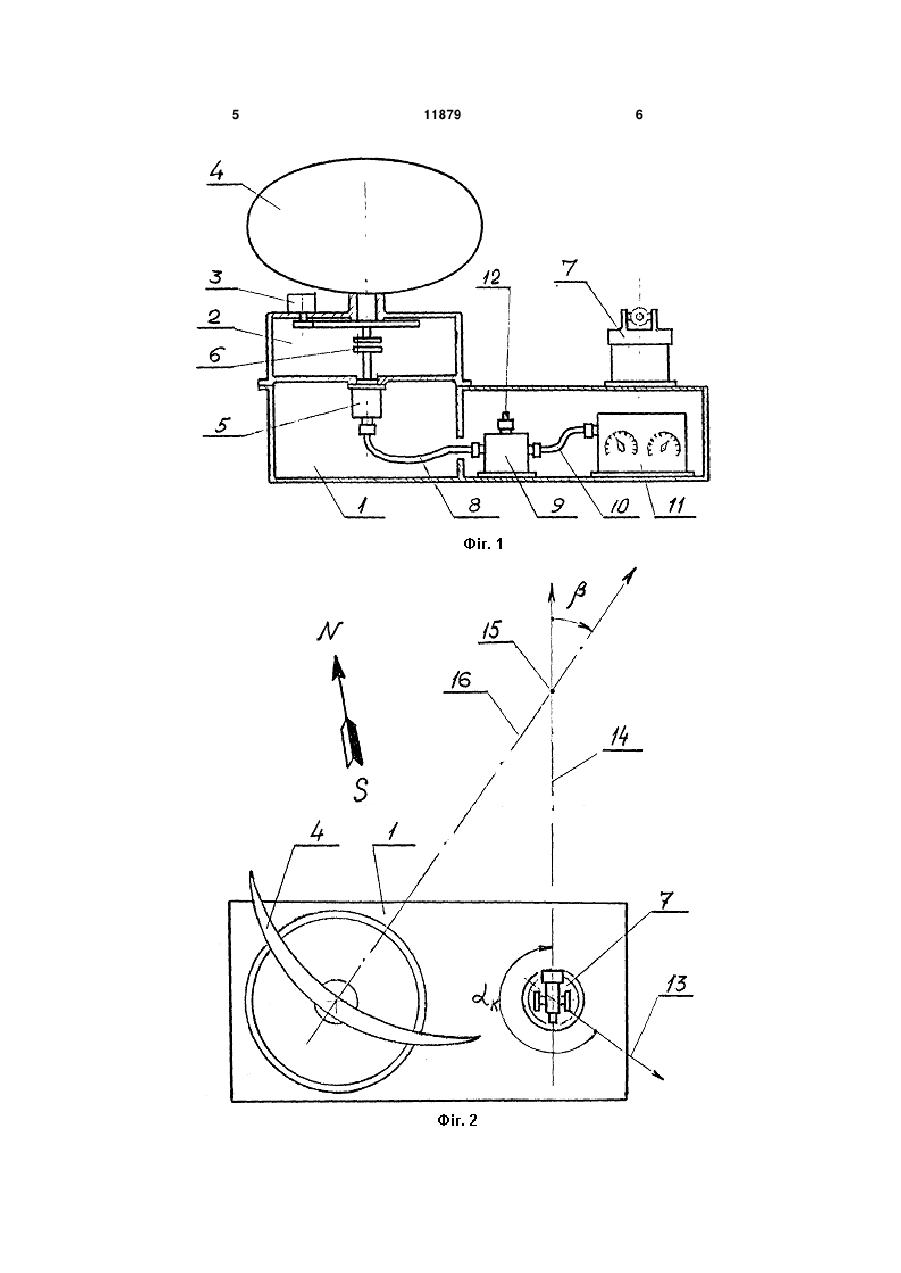
Пристрій установки датчика, що містить антену, закріплену на опорно-поворотному механізмі, установленому на основі, компас, пристрій введення інформації, датчик, ротор якого кінематично з'єднаний з антеною, а статор жорстко з'єднаний з основою, і суматор, один з входів якого з'єднаний з 3 напрямком меридіана на північ при нульовому показанні шкали компаса. Причинно-наслідковий зв'язок між сукупністю ознак корисної моделі і технічним результатом полягає в такому. Завдяки тому, що корпус компаса в довільному положенні жорстко з'єднаний з підставою, а з'єднання датчика з антеною стосовно компаса виконано так, що при напрямку оптичної осі антени і візирної осі компаса на той самий орієнтир показання датчика дорівнюють геометричній сумі ліченого по шкалі компаса азимутального кута між нульовим напрямком візування його на орієнтир, і азимутального кута між названим напрямком візування компаса і напрямком оптичної осі антени, причому, нульовим напрямком компаса прийнятий такий, жорстко зв'язаний з корпусом, напрямок, який збігається з напрямком меридіана на північ при нульовому показанні шкали компаса, спрощується і скорочується час орієнтування РЛС. Пристрій, що заявляється, пояснюється кресленнями Фіг.1 і Фіг.2. На Фіг.1 представлений загальний вид пристрою установки датчика. На Фіг.2 наведена схема візування антени і компаса при установці датчика. Пристрій установки датчика (Фіг.1) містить основу 1 з установленим на ньому опорноповоротним механізмом 2, постаченим приводом обертання 3. На опорно-поворотному механізмі 2 жорстко закріплена антена 4. Ротор датчика 5 за допомогою муфти 6 з'єднаний з антеною 4, а статор датчика 5 жорстко з'єднаний з основою 1. На основі 1 жорстко закріплений корпус компаса 7. Кабелем 8 датчик 5 з'єднаний з одним із входів суматора 9. Другий вхід суматора 9 з'єднаний кабелем 10 з пристроєм введення інформації 11. Вихід 12 суматора 9 призначений для з'єднання пристрою зі споживачем інформації про азимутальний кут антени 4. Пристрій установки датчика працює таким чином. Для орієнтування РЛС після її установки на позиції, незалежно від стану і положення антени 4, необхідно включити компас 7, зчитати показання з його шкали і ввести їх у пристрій введення інформації 11. На цьому орієнтування РЛС закінчено. При обертанні антени 4 у процесі роботи, зчленований з нею ротор датчика 5 теж обертається. Сигнал з датчика 5 по кабелю 8 надходить на суматор 9, де безупинно підсумовується з постійним сигналом, що надходить по кабелю 10 з пристрою введення інформації 11. У результаті сигнал на виході 12 суматора 9 завжди дорівнює значенню поточного азимута оптичної осі антени 4 і являє собою суму двох величин: d o T де o - азимут нульового напрямку компаса, величина лічена по шкалі компасу і введена в при 11879 4 стрій вводу інформації при орієнтуванні; T - поточний сигнал, який видається датчиком 5 при роботі пристрою. Необхідною і достатньою умовою для цього є первісна, виконана один раз при виготовленні пристрою, взаємна установка датчика, антени і компаса. Необхідно, щоб з'єднання ротора датчика 5 за допомогою муфти 6 з антеною 4 було зроблено при будь-якому одному довільно обраному положенні антени так, щоб показання датчика 5 було рівним: к де к - лічений по шкалі компаса азимутальний кут між нульовим напрямком 13 (Фіг.2) компаса 7 і напрямком 14 (Фіг.2) візування його на орієнтир 15 (Фіг.2); - кут між напрямком 14 візування компаса 7 і напрямком 16 (Фіг.2) оптичної осі антени 4. При цьому оптична вісь антени 4 і візирна вісь компаса 7 спрямовуються на той самий орієнтир 15, довільно обраний у полі зору. Після фіксації пристрою в даному положенні на шкалі датчика 5 установлюється значення кута і ротор датчика 5 з'єднується за допомогою муфти 6 з антеною 4. Нульовим напрямком компаса 7 названий такий жорстко зв'язаний з корпусом напрямок, при сполученні якого з напрямком меридіана на північ, показання на шкалі компаса 7 буде рівним нулю. Для визначення кута розаретування чуттєвого елемента компаса 7 не потрібно. Пропонований пристрій установки датчика суттєво спрощує і скорочує час орієнтування РЛС при установці її на позиції, що забезпечує кращу мобільність і, тим самим, підвищує її тактикотехнічні характеристики. Досягається це за рахунок того, що: - відпадає необхідність у визначенні азимута оптичної осі антени 4 при установці РЛС на позиції, тому антена 4 може при орієнтуванні РЛС знаходитися в будь-якому положенні і стані, це дозволяє орієнтувати РЛС паралельно з іншими операціями і за рахунок цього скоротити час (розгортання) приведення РЛС у робочий стан; - відпадає необхідність в оптичному візуванні антени 4 і компаса 7, а також, у пристроях для візування, що скорочує номенклатуру запасного майна і приладдя (ЗМП), спрощує експлуатацію РЛС і дозволяє робити її орієнтування в будь-який час і при будь-яких погодних умовах; - немає необхідності роз'єднувати кінематичний ланцюг, що з'єднує ротор датчика 5 з основою 1 завдяки чому спрощується і скорочується час орієнтування РЛС, а, так само, спрощується її конструкція. Пропонований пристрій установки датчика забезпечує високу точність орієнтування РЛС. 5 11879 6 7 Комп’ютерна верстка Д. Дорошенко 11879 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for setting an angular position transducer
Автори англійськоюLashko Leonid Oleksiiovych, Chupryna Andrii Andriiovych
Назва патенту російськоюУстройство для ориентации датчика углового положения
Автори російськоюЛашко Леонид Алексеевич, Чуприна Андрей Андреевич
МПК / Мітки
МПК: G01C 1/00
Мітки: пристрій, установки, датчика
Код посилання
<a href="https://ua.patents.su/4-11879-pristrijj-ustanovki-datchika.html" target="_blank" rel="follow" title="База патентів України">Пристрій установки датчика</a>
Пристрій для установки і кріплення запасного колеса
Номер патенту: 67849
Опубліковано: 15.07.2004
Автори: Паламарчук Назар Олегович, Паламарчук Олег Васильович, Крайник Юрій Любомирович
МПК: B62D 43/00
Мітки: кріплення, установки, запасного, пристрій, колеса
Формула / Реферат:
1. Пристрій для установки і кріплення запасного колеса транспортного засобу, який містить раму для кріплення колеса, обладнану рамками для полегшення переміщення колеса, направляючі ролики і пристрій для кріплення рами, який відрізняється тим, що він має гнучкий трос, зв'язаний одним кінцем по осі обода колеса з тримачем запасного колеса, а другим - з кронштейном, встановленим на основі кузова, упорний вузол, складений з клиноподібних...
Пристрій для установки електродів
Номер патенту: 28582
Опубліковано: 16.10.2000
Автор: Деркач Василь Григорович
МПК: A61B 5/02
Мітки: електродів, установки, пристрій
Формула / Реферат:
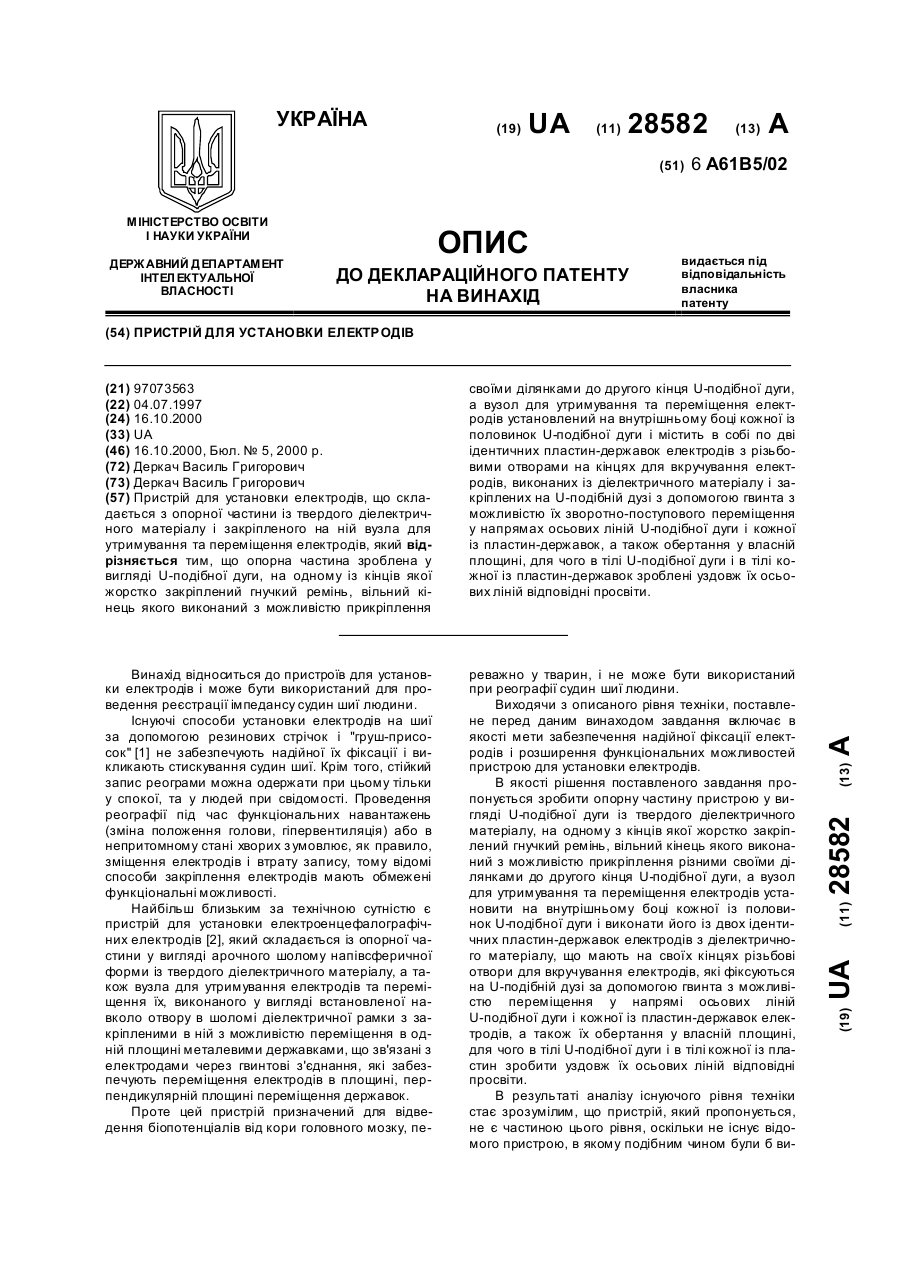
Пристрій для установки електродів, що складається з опорної частини із твердого діелектричного матеріалу і закріпленого на ній вузла для утримування та переміщення електродів, який відрізняється тим, що опорна частина зроблена у вигляді U-подібної дуги, на одному із кінців якої жорстко закріплений гнучкий ремінь, вільний кінець якого виконаний з можливістю прикріплення своїми ділянками до другого кінця U-подібної дуги, а вузол для утримування...
Пристрій для установки запасного колеса транспортного засобу

Номер патенту: 10560
Опубліковано: 15.11.2005
Автори: Кучеров Василь Андрійович, Прасолов Леонід Пилипович, Кліменко Олександр Сергійович
МПК: B62D 43/00
Мітки: транспортного, запасного, колеса, пристрій, установки, засобу
Формула / Реферат:
1. Пристрій для установки запасного колеса транспортного засобу, який містить вертикальний кронштейн, жорстко прикріплений до транспортного засобу, тримач запасного колеса, шарнірно скріплений з вертикальним кронштейном, і фіксатор, що взаємодіє з тримачем запасного колеса, який відрізняється тим, що вертикальний кронштейн виконано у вигляді трьох L-подібних стояків, з'єднаних між собою вільними кінцями горизонтально розташованих полиць таким...
Пристрій для установки сигналізатора температури в середині дейдвудної труби
Номер патенту: 8578
Опубліковано: 30.09.1996
Автори: Турлюн Микола Михайлович, Тульський Станіслав Борисович, Лавінюков Олександр Миколайович
МПК: B63H 23/00
Мітки: трубі, установки, пристрій, середині, дейдвудної, температури, сигналізатора
Формула / Реферат:
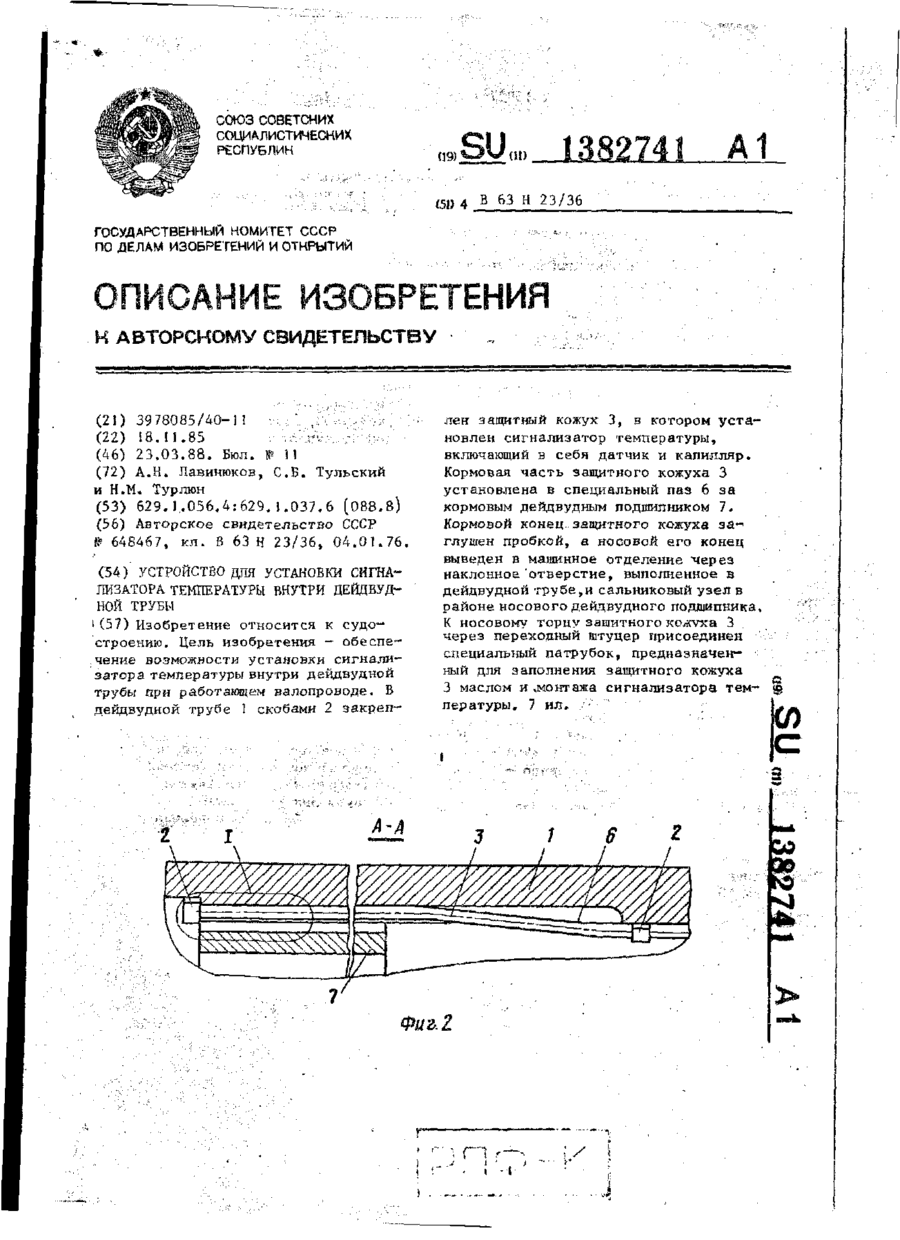
Устройство для установки сигнализатора температуры внутри дейдвудной трубы, содержащее защитны й кожух, внутри которого установлены датчик и капилляр сигнализатора температуры, отличающееся тем, что, с целью обеспечения возможности установки сигнализатора температуры внутри дейдвудной трубы при работающем валопроводе, защитный кожух выполнен герметичным, при этом носовой конец его через наклонное отверстие, которое выполнено в...
Магнітна система датчика частоти обертання
Номер патенту: 35339
Опубліковано: 15.03.2001
Автори: Крієренко Анатолій Георгійович, Яковенко Валерій Володимирович
МПК: G01P 3/42
Мітки: система, датчика, магнітна, частоти, обертання
Формула / Реферат:
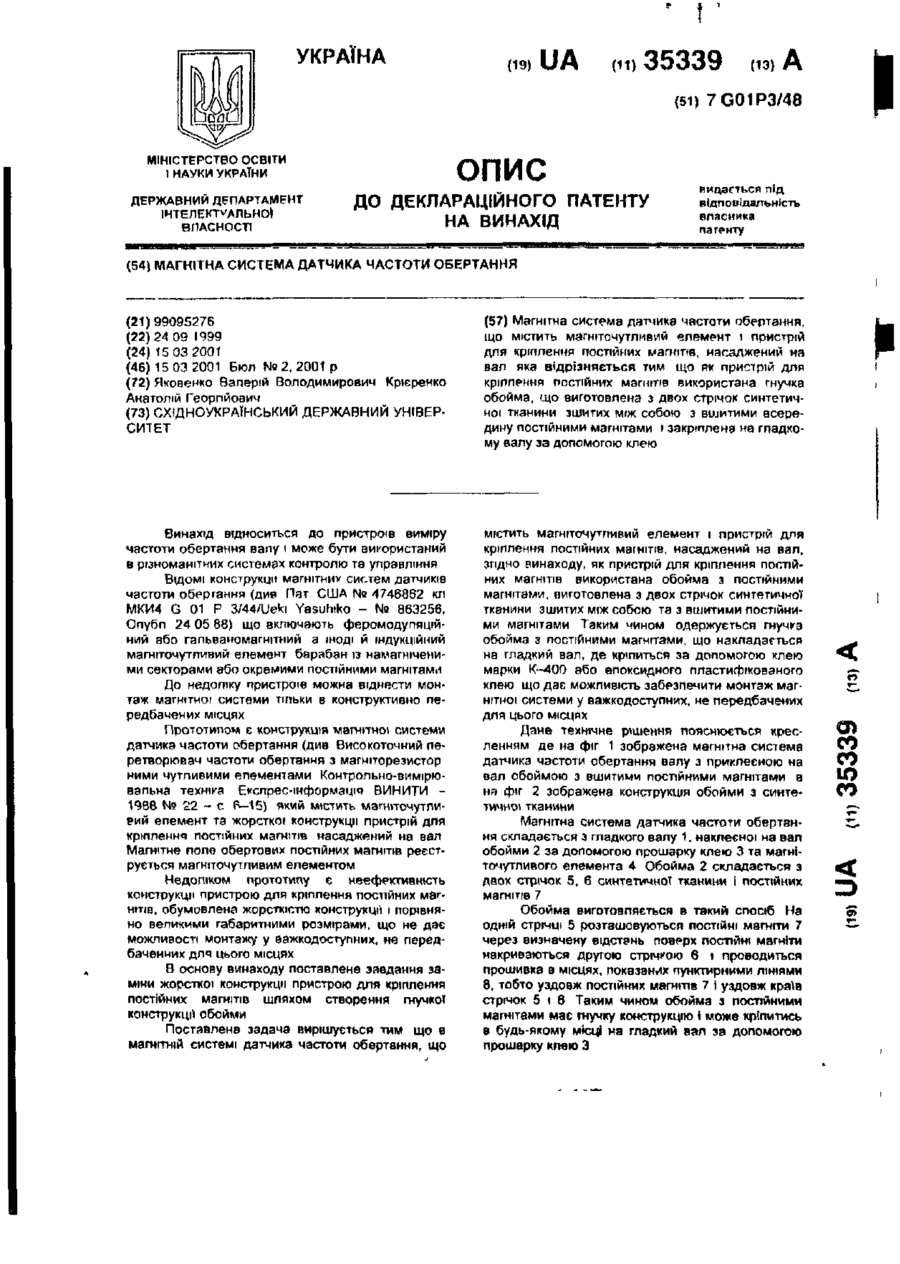
Магнітна система датчика частоти обертання, що містить магніточутливий елемент і пристрій для кріплення постійних магнітів, насаджений на вал, яка відрізняється тим, що як пристрій для кріплення постійних магнітів використана гнучка обойма, що виготовлена з двох стрічок синтетичної тканини, зшитих між собою, з вшитими всередину постійними магнітами, і закріплена на гладкому валу за допомогою клею.
Попередній патент: Аутригер для пристрою горизонтування рлс
Наступний патент: Спосіб визначення локалізації гнояків при гнійних захворюваннях кисті та пальців
Випадковий патент: Тара для демонстрації та зберігання монет