Спосіб керування підйому машин та агрегатів на домкратах
Номер патенту: 119403
Опубліковано: 25.09.2017
Автори: Левченко Едуард Петрович, Матвєйчук Олександр Сергійович, Чебан Віктор Григорович, Ткачов Роман Юр'євич


Формула / Реферат
Спосіб керування домкратами, що включає взаємодію гідронасоса та гідроциліндрів за допомогою рідини, наприклад мастила, та злив рідини з гідроциліндрів у гідробак, який відрізняється тим, що керування здійснюють за допомогою мікропроцесорної техніки, наприклад комп'ютера, а контроль за допомогою гіроскопа, що реагує на можливі відхилення у підйомі домкратів та передає показники до комп'ютера, при цьому корекція відхилень на домкратах відбувається на самому комп'ютері.
Текст
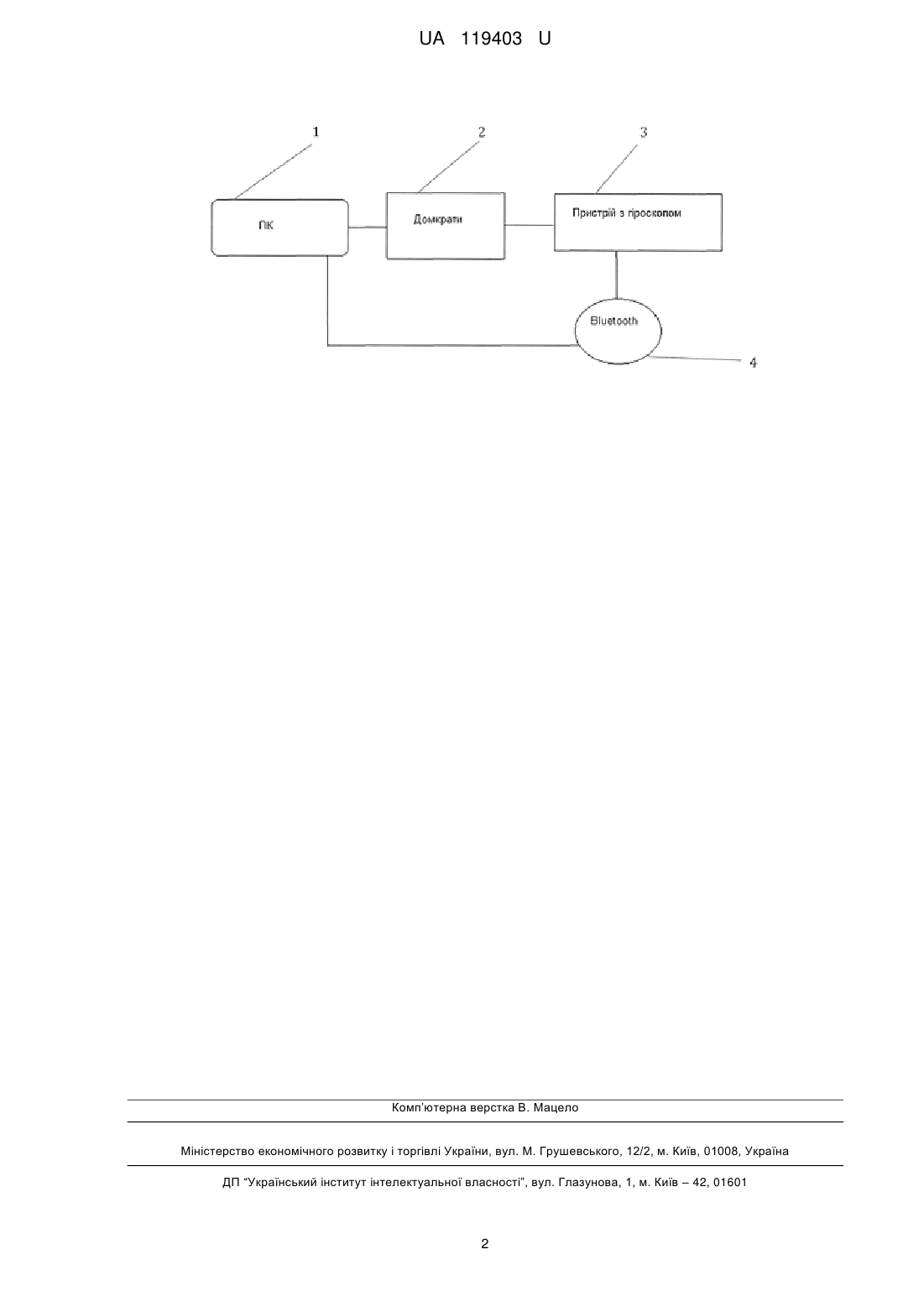
Реферат: Спосіб керування домкратами включає взаємодію гідронасоса та гідроциліндрів за допомогою рідини, наприклад мастила, та злив рідини з гідроциліндрів у гідробак. Керування здійснюють за допомогою мікропроцесорної техніки, наприклад комп'ютера, а контроль за допомогою гіроскопа, що реагує на можливі відхилення у підйомі домкратів та передає показники до комп'ютера. Корекція відхилень на домкратах відбувається на самому комп'ютері. UA 119403 U (12) UA 119403 U UA 119403 U 5 10 15 20 25 30 35 40 45 Корисна модель належить до гідроприводів підйому машин та їх вузлів та агрегатів, може бути використана у різних галузях промисловості для підйому та утримання різних машин і агрегатів. Відомим аналогом є спосіб керування домкратом, що включає взаємодію звичайного гідронасоса та гідроциліндра за допомогою рідини, наприклад мастила, та опускання домкрата за допомогою зливу робочої рідини з гідроциліндра у гідробак [Гидравлические приводы. Богданович Л.Б.: Учеб. пособие для вузов. - К.: Вища школа. Головное изд-во, 1980. - 232 с.] Недоліком аналога керування домкратами є низька ефективність процесу, що пов'язана з неточністю підйому декількох домкратів одночасно, та неузгодженість їх керування. В основу корисної моделі поставлена задача вдосконалення способу керування домкратами, в якому, завдяки новому додаванню пов'язаних між собою гіроскопа, комп'ютера та спеціальної гідросистеми для об'єднання всіх домкратів, досягається підвищення ефективності процесу керування домкратами та надійність самого процесу. Поставлена задача вирішується тим, що у способі керування домкратами, що включає взаємодію гідронасоса та гідроциліндра за допомогою рідини, наприклад мастила, та злив рідини з гідроциліндра у гідробак, згідно з корисною моделлю, керування здійснюється за допомогою мікропроцесорної техніки, наприклад комп'ютера, а контроль за допомогою гіроскопа, що реагує на можливі відхилення у підйомі домкратів та передає показники до комп'ютера, при цьому корекція відхилень на домкратах відбувається на самому комп'ютері. Корисна модель пояснюється кресленням, де схематично показано спосіб керування домкратами. Комп'ютер 1 з встановленою програмою для керування гідросистемою з'єднано з гідросистемою домкратів 2 за допомогою електромагнітних контактів на розподілювачі, пристрій з гіроскопом 3 встановлюється у саму машину, яка встановлюється на домкрати, для передачі даних з гіроскопа до комп'ютера може використовуватися Bluetooth передача 4. Зазвичай машина встановлюються на декілька домкратів, тому зберігання синхронності її підйому є дуже складним завданням, що пов'язано з труднощами її у горизонтальному положенні, або під необхідним кутом. Це призводить до значної втрати часу та прикладання значних зусиль. Комп'ютер 1 за допомогою спеціальної програми здійснює керування домкратами 2, що включає взаємодію гідронасоса та гідроциліндра за допомогою рідини, наприклад мастила, та зливу рідини з гідроциліндра у гідробак. З мікропроцесора комп'ютера 1 подається сигнал на електромагнітні контакти розподілювача гідравлічної системи домкратів, замість звичайної ручної накачки гідронасосів домкратів, а завдяки гіроскопу точно відстежується відхилення машини на домкратах, замість звичайного виставляння її за нівеліром або по міткам. Завдяки системі передачі даних Bluetooth 4, вся інформація з гіроскопа передається на комп'ютер 1. За допомогою гіроскопа машина може орієнтуватися у просторі і фіксуватися у положенні відносно підлоги, завдяки Bluetooth передачі 4, інформація з гіроскопа 4 передається до комп'ютера 1 з встановленою на ньому спеціальною програмою, при цьому можна подавати команди на розподілювач гідросистеми домкратів 2 через електромагнітні контакти, завдяки чому домкрати певним чином опускаються та підіймаються, а потрібна інформація про ці дії відображається на моніторі комп'ютера 1. Запропонований спосіб керування домкратами дозволяє підвищити точність та швидкість керування за рахунок включення у систему гіроскопа та комп'ютерних технологій, під час опускання та підіймання машини на домкратах до закінчення робіт над машиною. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 Спосіб керування домкратами, що включає взаємодію гідронасоса та гідроциліндрів за допомогою рідини, наприклад мастила, та злив рідини з гідроциліндрів у гідробак, який відрізняється тим, що керування здійснюють за допомогою мікропроцесорної техніки, наприклад комп'ютера, а контроль за допомогою гіроскопа, що реагує на можливі відхилення у підйомі домкратів та передає показники до комп'ютера, при цьому корекція відхилень на домкратах відбувається на самому комп'ютері. 1 UA 119403 U Комп’ютерна верстка В. Мацело Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B66F 3/00, B60S 9/00, F16D 33/12
Мітки: домкратах, підйому, агрегатів, спосіб, керування, машин
Код посилання
<a href="https://ua.patents.su/4-119403-sposib-keruvannya-pidjjomu-mashin-ta-agregativ-na-domkratakh.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування підйому машин та агрегатів на домкратах</a>
Спосіб діагностування агрегатів і вузлів рульового керування шарнірно зчленованих машин
Номер патенту: 105176
Опубліковано: 10.03.2016
Автори: Мазін Олексій Сергійович, Шеїн Віталій Сергійович, Радченко Юлія Андріанівна, Коробко Андрій Іванович, Лебедєв Анатолій Тихонович, Подригало Михайло Абович, Лебедєв Сергій Анатолійович
МПК: G01P 15/00, G01M 17/007, G01M 17/06
Мітки: зчленованих, рульового, агрегатів, вузлів, діагностування, керування, спосіб, шарнірно, машин
Формула / Реферат:
Спосіб діагностування агрегатів і вузлів рульового керування шарнірно зчленованих машин, що базується на вимірюванні лінійних прискорень, що виникають при повороті направляючих коліс, який відрізняється тим, що визначення стану вузлів і агрегатів рульового керування проводиться по непрямих параметрах - лінійне прискорення, що виникає при повороті направляючих коліс, шляхом введення нових діагностичних параметрів та нового випробувального...
Спосіб визначення ваги та навантаження на керовані колеса самохідних сільськогосподарських машин та енергетичних засобів мобільних агрегатів
Номер патенту: 74680
Опубліковано: 12.11.2012
Автори: Громитко Віталій Васильович, Митрофанов Олександр Петрович, Лілевман Олександр Йосипович, Терещук Зоя Михайлівна, Подольський Михайло Ігорович, Кучеренко Володимир Григорович, Лілевман Ігор Йосипович
МПК: B60S 9/00
Мітки: мобільних, машин, засобів, навантаження, спосіб, ваги, керовані, енергетичних, агрегатів, визначення, сільськогосподарських, колеса, самохідних
Формула / Реферат:
1. Спосіб визначення ваги та навантаження на керовані колеса самохідних сільськогосподарських машин та енергетичних засобів мобільних агрегатів, що включає визначення вагових характеристик самохідних машин та енергетичних засобів за допомогою гідравлічного ваговимірювального приладу, який відрізняється тим, що спочатку визначають нормальний прогин шин, під колеса, які протилежні керованим, встановлюють підставки висотою, яка більша від...
Система пуску насосних агрегатів для підйому води у магістральний трубопровід
Номер патенту: 57751
Опубліковано: 10.03.2011
Автори: Костюк Степан Лукьянович, Черних Владислав Миколайович, Шумейко Григорій Іванович, Нікулін Микола Іванович
МПК: E03B 1/00, F04B 23/00
Мітки: пуску, магістральний, води, агрегатів, насосних, підйому, трубопровід, система
Формула / Реферат:
1. Система пуску насосних агрегатів для підйому води у магістральний трубопровід, яка містить резервуари чистої води, насосні станції підйому води, де встановлені насосні агрегати з напірними трубопроводами, яка відрізняється тим, що насосні агрегати на насосних станціях встановлені зменшувальною енергоємністю, а до напірних трубопроводів насосних агрегатів виконані сполучні перемички із запірно-регулюючим пристроєм, причому кожний окремий...
Спосіб автоматичного керування та захисту заглибних електронасосних агрегатів
Номер патенту: 40820
Опубліковано: 15.08.2001
Автор: Кравченко Ганна Євгенівна
МПК: H02H 7/08
Мітки: спосіб, захисту, автоматичного, агрегатів, заглибних, електронасосних, керування
Формула / Реферат:
Спосіб автоматичного керування та захисту заглибних електронасосних агрегатів, що полягає в автоматичному пуску та зупинці агрегату в залежності від рівня води у водонапірній башті (свердловині) або тиску води з регульованою витримкою часу перед пуском, контролі фазних струмів, відключенні агрегату при перевантаженнях, коротких замиканнях, неповнофазному режимі живлення, несиметрії живильних напруг, зниженні рівня води у...
Спосіб керування електродвигунами насосних агрегатів станції водопостачання
Номер патенту: 74429
Опубліковано: 25.10.2012
Автори: Лісний Микола Іванович, Мажейкіс Ірина Едвардівна, Михайличенко Дмитро Анатолієвич
МПК: E03B 5/00, F04D 15/00
Мітки: водопостачання, спосіб, станції, електродвигунами, агрегатів, насосних, керування
Формула / Реферат:
Спосіб керування електродвигунами насосних агрегатів станції водопостачання, який полягає у вимірюванні напору води на виході основного насосу та порівнянні вимірюваного напору із заданим значенням та мінімізації відхилень вимірюваного напору від заданого значення шляхом впливу на частоту обертання електродвигуна насосу, який відрізняється тим, що при зменшенні поточного значення напору на виході та максимальній продуктивності основного...
Попередній патент: Спосіб оцінки ефективності лікування аденозинтрифосфорною кислотою хворих на ішемічну хворобу серця з стенокардією
Наступний патент: Спосіб зняття залишкових напруг у ливарних деталях
Випадковий патент: Спосіб одержання 3-амінотіолан-1,1-диоксиду