Квазінейрорегулятор для електромеханічної системи
Номер патенту: 12362
Опубліковано: 15.02.2006
Автори: Клепіков Володимир Борисович, Руденко Андрій Валентинович, Полянська Ірина Сергіївна, Колотіло Віталій Іванович

Формула / Реферат
1. Квазінейрорегулятор для електромеханічної системи, виконаний по архітектурі найпростішої нейронної мережі, що містить кілька елементів затримки, кілька вхідних нейронів і один вихідний, який відрізняється тим, що число вхідних нейронів вибирається не довільно, а визначається на одиницю більшим за порядок характеристичного полінома системи, коефіцієнти ваги визначаються із співвідношень, отриманих шляхом синтезу модального регулятора для моделі, поданої у канонічній формі фазової змінної, з подальшим застосуванням кінцево-різницевого математичного апарату, активаційна функція має одиничний коефіцієнт підсилення в області початку координат, а функціональне перетворення здійснюється на вихідному нейроні.
2. Квазінейрорегулятор за п. 1, який відрізняється тим, що при існуванні нелінійностей кількість вихідних нейронів обирається рівною кількості ділянок лінеаризації, кількість яких обирається за умовою необхідної точності апроксимації, причому кожний з вихідних нейронів з'єднаний із логічним блоком, який підключає необхідний вихідний нейрон до входу перетворювача залежно від розташування робочої точки на тій чи іншій ділянці лінеаризованої характеристики.
Текст
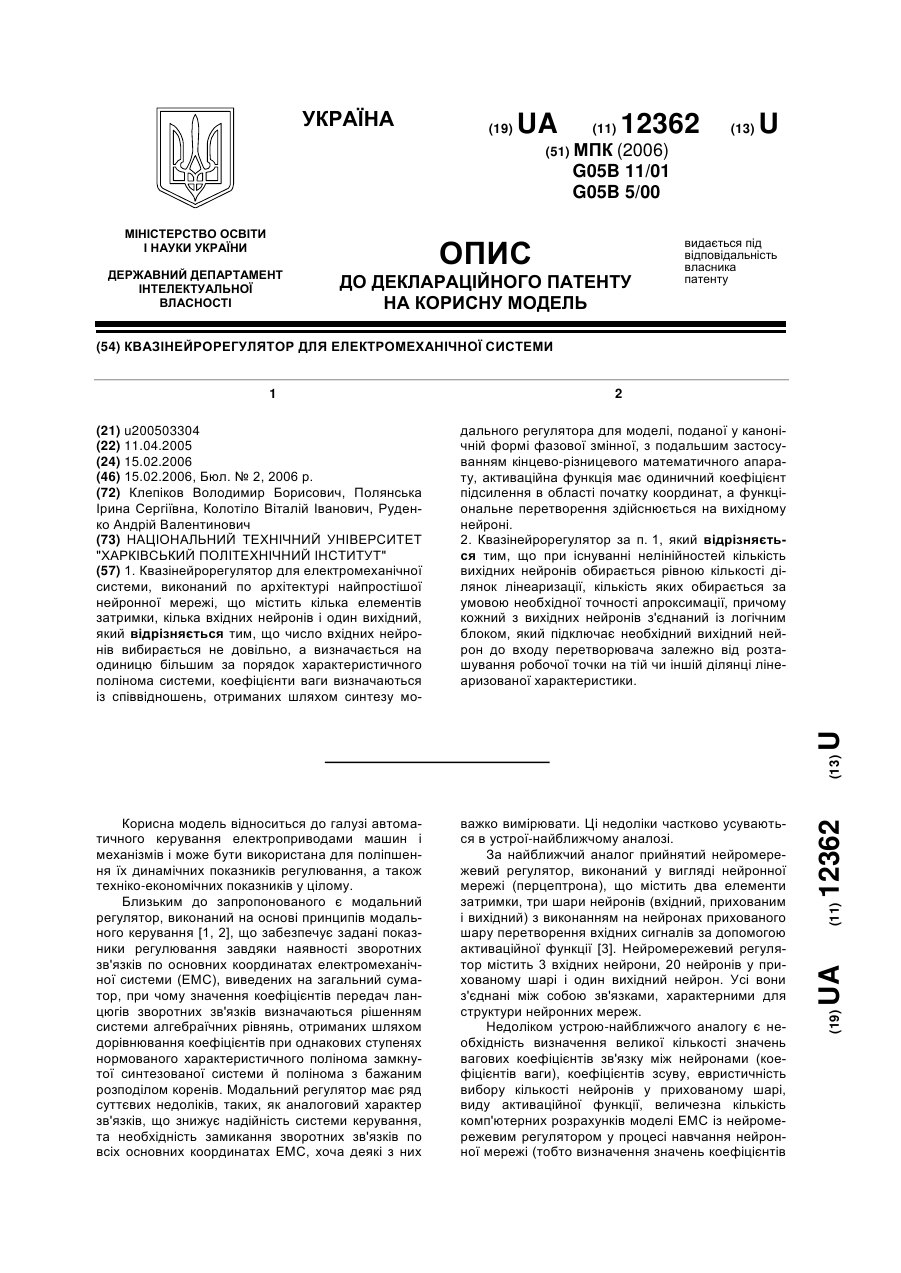
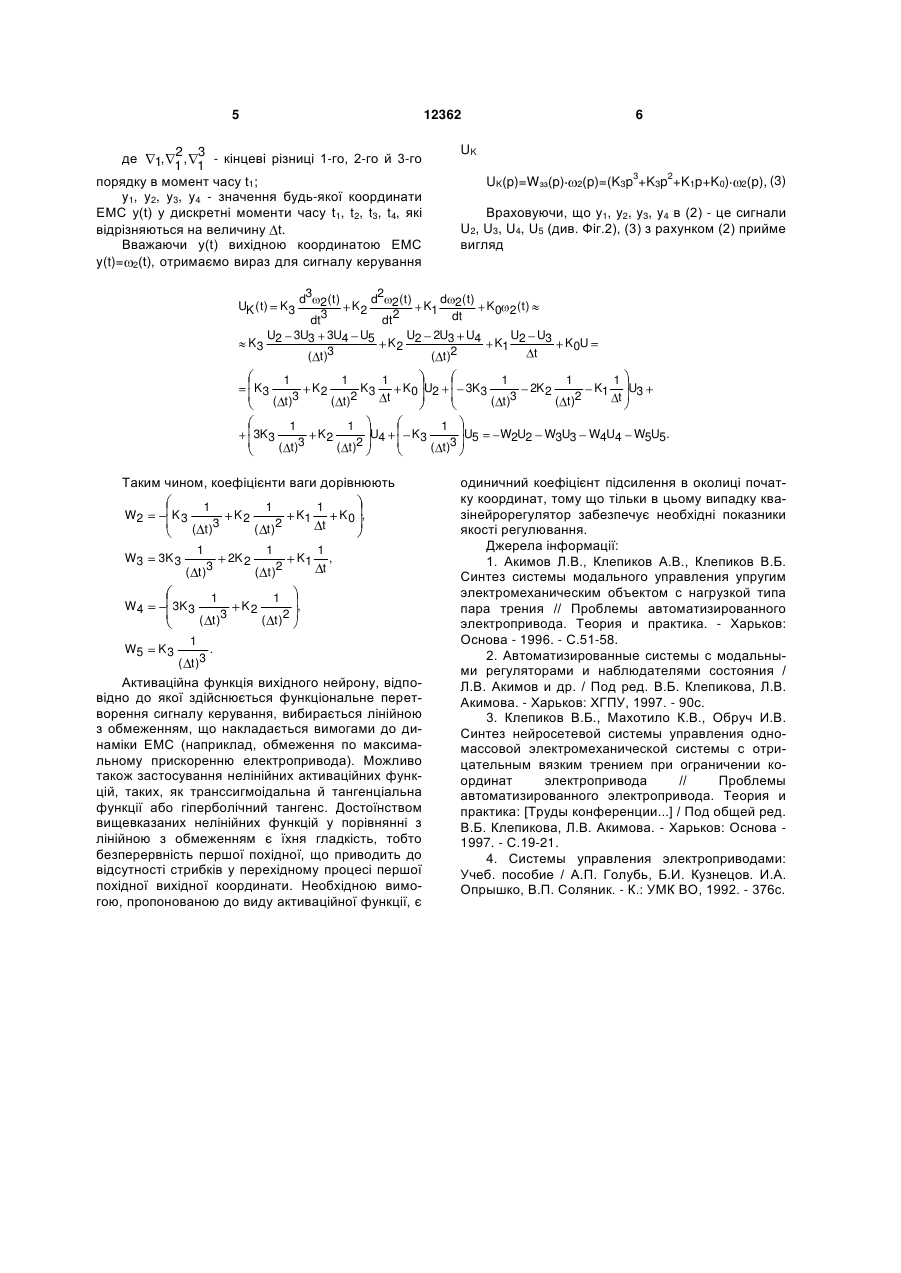
1. Квазінейрорегулятор для електромеханічної системи, виконаний по архітектурі найпростішої нейронної мережі, що містить кілька елементів затримки, кілька вхідних нейронів і один вихідний, який відрізняється тим, що число вхідних нейронів вибирається не довільно, а визначається на одиницю більшим за порядок характеристичного полінома системи, коефіцієнти ваги визначаються із співвідношень, отриманих шляхом синтезу мо 3 12362 4 ваги і коефіцієнтів зсуву). квазінейрорегулятора дорівнює кількості лінійних Задача запропонованого пристрою полягає в ділянок. Кожний з вихідних нейронів з'єднаний із істотному скороченні часу навчання нейронної логічним блоком (ЛБ), який оцінює розташування мережі, що знижує витрати на розробку нейромеробочої точки на тій чи іншій ділянці лінеаризоварежевої системи керування, строге аналітичне ної характеристики (наприклад, на підставі даних, визначення значень вагових коефіцієнтів обраної отриманих комп'ютерною діагностикою), та підкструктури, однозначність завдання активаційної лючає вхід перетворювача до того з вихідних нейфункції на вихідному нейроні при одночасному ронів, який відповідає аналітичне синтезованим забезпеченні заданих показників регулювання, як для даної лінійної ділянки значенням коефіцієнтів це має місце при використанні модального регуляваги (Фіг.1). тора, однак далеко не завжди досягається при Структурна алгоритмічна схема об'єкта регувикористанні існуючих нейромережевих регулятолювання (двомасової ЕМС із від'ємним в'язким рів, у тому числі устрою-найближчого аналогу. тертям) (Фіг.2) містить у собі перетворювач (1), Досягнення поставленої задачі проілюстроваелектричну й механічну частини електродвигуна (2 но на прикладі побудови квазінейрорегулятора і 3), пружний елемент (4), другу масу (робочий для електроприводів машин і механізмів із проковорган) (5) і навантаження (6), механічна характезуванням, що представляють собою двомасову ристика якої містить падаючу ділянку. ЕМС із від'ємним в'язким тертям (ВВТ), що є почаСтруктурна алгоритмічна схема квазінейрореткове нестійкою та схильною до переходу в режим гулятора, що відповідає находженню ЕМС із ВВТ фрикційних автоколивань. на якій-небудь одній ділянці механічної характериНа Фіг.1 представлена функціональна схема стики тертя, у рамках якого систему можна розгквазінейрорегулятора, на Фіг.2 - структурна алголядати як лінійну (Фіг.2), містить 3 блоки затримки, ритмічна схема двомасової ЕМС із ВВТ із квазі5 вхідних нейронів і один вихідний нейрон з актинейрорегулятором. ваційною функцією. У запропонованій структурі Принцип дії квазінейрорегулятора полягає в необхідно аналітично розрахувати лише 5 значень наступному. Сигнал про значення вихідної коорвагових коефіцієнтів, при цьому коефіцієнти зсуву динати об'єкта регулювання (швидкості обертання приймаються рівними нулю. валу робочого органу) знімається з цифрового Аналітичні співвідношення для розрахунку ваоптичного датчика швидкості та подається на блок гових коефіцієнтів квазінейрорегулятора, що, висигналів керування (БСК), що містить декілька користовуючи інформацію всього лише про одну блоків затримки (БЗ), кількість яких на одиницю координату нестійкої двомасової ЕМС, забезпечує менша за порядок характеристичного полінома в ній необхідний динамічний режим по вільній ЕМС. БСК здійснює розподіл існуючого й попередскладовій, отримують у такий спосіб. Математичну ніх (затриманих) значень координат об'єкта регумодель ЕМС із фізичними координатами (швидлювання і подає їх, а також сигнал завдання U1 на кість обертання валу робочого органу, двигуна, відповідні вхідні нейрони (1...m). Сигнали вхідних пружний момент та момент двигуна) перетворюнейронів надходять на блоки множення, де помють на модель у канонічній формі фазової змінної ножуються на значення коефіцієнтів ваги. На від(КФФЗ) (у канонічної формі керованості) [4] із одніміну від устрою-найближчий аналогу, коефіцієнти єю фізичною координатою, вихідною - швидкістю ваги визначаються за допомогою нижчеподаних обертання валу робочого органу. Решта координат аналітичних співвідношень, а не в наслідок багато є абстрактними - це кілька перших похідних вихідчисельних (від десяти до ста сотень тисяч) розраної координати, при чому їх кількість на одиницю хунків динамічних процесів системи. Отримані пісменша за порядок об'єкта. Для моделі в КФФЗ ля перемноження значення сигналів передаються синтезують модальний регулятор. безпосередньо на вихідні нейрони (1...n), а не на Коефіцієнти модального зворотного зв'язку К0, нейрони прихованого шару, як в устроїК1, К2, К3 дорівнюють коефіцієнтам передавальної найближчому аналозі. Сигнали з вихідних нейронів функції зворотного зв'язку Wзз по вихідній коордиперетворюються відповідно до активаційної функнаті ЕМС ції, реалізованої блоком функціонального перетWзз(p)=K3p3+K3p2+K1p+K0, (1) ворення, формуючи в такий спосіб сигнал керуде р - оператор диференціювання. вання UK. Далі здійснюється перехід від операції дифеДля лінійної системи достатньо одного вхідноренціювання до кінцевих різниць згідно зі співвідго нейрону, але в разі нелінійної системи її неліношеннями, які виконуються при малому інтервалі нійність лінеаризується, при чому кількість лінійних дискретизації t ділянок обирається за умовою необхідної точності апроксимації, а кількість нейронів у вихідному шарі dy dt t1 1 t dy2 dt 2 2 1 ( t )2 1 2 ( t )2 ( y1 y2 ) ( y 2 ( t )2 3 1 ( t )3 2 2 1 1 ( t )3 ( y1 2y 2 dy3 dt3 t1 t1 y1 y 2 ; t y3 ) y1 2y 2 y3 ; 2 ( t )2 y3 ) ( y 2 2y3 ( t )3 y4 ) y1 3 y 2 3 y3 ( t )3 (2) y4 , 5 12362 6 UK 2 3 1, 1 , 1 - кінцеві різниці 1-го, 2-го й 3-го порядку в момент часу t1; y1, y2, y3, y4 - значення будь-якої координати ЕМС у(t) у дискретні моменти часу t1, t2, t3, t4, які відрізняються на величину t. Вважаючи y(t) вихідною координатою ЕМС y(t)= 2(t), отримаємо вираз для сигналу керування де K3 K3 1 ( t )3 3K 3 K2 1 ( t )3 1 K 2 3 t ( t) K 0 U2 1 U4 ( t )2 K3 K2 1 Таким чином, коефіцієнти ваги дорівнюють W2 W3 W4 W5 K3 3K 3 1 ( t )3 1 ( t )3 3K 3 K3 1 ( t )3 1 ( t )3 K2 2K 2 1 ( t )2 1 ( t )2 K2 2(p), (3) Враховуючи, що y1, y2, y3, y4 в (2) - це сигнали U2, U3, U4, U5 (див. Фіг.2), (3) з рахунком (2) прийме вигляд d3 2 ( t ) d2 2 ( t ) d (t) K2 K1 2 K0 2(t) 3 dt dt dt 2 U 3U3 3U4 U5 U 2U3 U4 U U3 K3 2 K2 2 K1 2 t ( t )3 ( t )2 UK ( t ) 3 2 2(p)=(K3p +K3p +K1p+K0) UK(p)=Wзз(p) 1 ( t )2 K1 1 t K1 1 , t K0 , , . Активаційна функція вихідного нейрону, відповідно до якої здійснюється функціональне перетворення сигналу керування, вибирається лінійною з обмеженням, що накладається вимогами до динаміки ЕМС (наприклад, обмеження по максимальному прискоренню електропривода). Можливо також застосування нелінійних активаційних функцій, таких, як транссигмоідальна й тангенціальна функції або гіперболічний тангенс. Достоїнством вищевказаних нелінійних функцій у порівнянні з лінійною з обмеженням є їхня гладкість, тобто безперервність першої похідної, що приводить до відсутності стрибків у перехідному процесі першої похідної вихідної координати. Необхідною вимогою, пропонованою до виду активаційної функції, є 3K 3 1 U5 ( t )3 1 ( t )3 2K 2 W2U2 K 0U 1 ( t )2 W3U3 K1 1 U3 t W4U4 W5U5. одиничний коефіцієнт підсилення в околиці початку координат, тому що тільки в цьому випадку квазінейрорегулятор забезпечує необхідні показники якості регулювання. Джерела інформації: 1. Акимов Л.В., Клепиков А.В., Клепиков В.Б. Синтез системы модального управления упругим электромеханическим объектом с нагрузкой типа пара трения // Проблемы автоматизированного электропривода. Теория и практика. - Харьков: Основа - 1996. - С.51-58. 2. Автоматизированные системы с модальными регуляторами и наблюдателями состояния / Л.В. Акимов и др. / Под ред. В.Б. Клепикова, Л.В. Акимова. - Харьков: ХГПУ, 1997. - 90с. 3. Клепиков В.Б., Махотило К.В., Обруч И.В. Синтез нейросетевой системы управления одномассовой электромеханической системы с отрицательным вязким трением при ограничении координат электропривода // Проблемы автоматизированного электропривода. Теория и практика: [Труды конференции...] / Под общей ред. В.Б. Клепикова, Л.В. Акимова. - Харьков: Основа 1997. - С.19-21. 4. Системы управления электроприводами: Учеб. пособие / А.П. Голубь, Б.И. Кузнецов. И.А. Опрышко, В.П. Соляник. - К.: УМК ВО, 1992. - 376с. 7 Комп’ютерна верстка М. Мацело 12362 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюController with neuron structure for an electromechanical system
Автори англійськоюKlepikov Volodymyr Borysovych, Kolotilo Vitalii Ivanovych
Назва патенту російськоюРегулятор с нейронной структурой для электромеханической системы
Автори російськоюКлепиков Владимир Борисович, Колотило Виталий Иванович
МПК / Мітки
МПК: G05B 5/00, G05B 11/01
Мітки: електромеханічної, системі, квазінейрорегулятор
Код посилання
<a href="https://ua.patents.su/4-12362-kvazinejjroregulyator-dlya-elektromekhanichno-sistemi.html" target="_blank" rel="follow" title="База патентів України">Квазінейрорегулятор для електромеханічної системи</a>
Спосіб побудови моделі нелінійної динамічної системи
Номер патенту: 41143
Опубліковано: 15.08.2001
Автори: Гуртов Олександр Олександрович, Зубко Олег Олександрович, Нащанський Олександр Анатолійович, Зєліков Всеволод Ілліч, Серков Олександр Анатолійович, Горєлов Олександр Сергійович
МПК: G05B 23/02
Мітки: побудови, моделі, нелінійної, динамічної, спосіб, системі
Формула / Реферат:
Спосіб побудови моделі нелінійної динамічної системи, що включає до свого складу подачу тестуючих імпульсів, визначення реакції на тестуючий імпульс, який відрізняється тим, що додаткове тестування відбувається пакетом імпульсів, кількість яких у пакеті та часова відстань між ними змінюєтся під час тестування.
Спосіб визначення положення осей координат інерціальної навігаційної системи об’єкта відносно базової системи (варіанти)
Номер патенту: 59494
Опубліковано: 15.09.2003
Автори: Ковалєвскій Міхаіл Марковіч, Монахов Юрій Владіміровіч, Борісов Андрєй Владіміровіч, Іванов Робєрт Константіновіч, Карпов Анатолій Стєпановіч, Рачук Владімір Сєргєєвіч
МПК: G01S 5/02, G01S 5/04, G01S 5/00
Мітки: навігаційної, визначення, спосіб, координат, варіанти, положення, системі, базової, відносної, осей, інерціальної, об'єкта
Формула / Реферат:
1. Спосіб визначення положення осей координат інерціальної навігаційної системи (2) об'єкта (1) відносно базової системи координат (3), що включає навігаційні вимірювання об'єкта (1), рухомого в інерціальному просторі, в базовій системі координат (3) і в інерціальній системі координат об'єкта (2), який відрізняється тим, що:- в моменти часу tі і tі+1 вимірюють координати рухомого об'єкта (1) в системі координат Глобальної навігаційної...
Спосіб оптимізації за швидкодією системи з широтно-імпульсною модуляцією
Номер патенту: 8756
Опубліковано: 15.08.2005
Автори: Денисов Юрій Олександрович, Іванець Сергій Анатолійович
МПК: H02M 3/00
Мітки: оптимізації, широтно-імпульсною, системі, спосіб, швидкодією, модуляцією
Формула / Реферат:
Спосіб оптимізації за швидкодією системи з широтно-імпульсною модуляцією, який включає зміну значень параметрів мікропроцесорного регулятора в залежності від зони модуляції напруги, комутованої перетворювачем, який відрізняється тим, що зону модуляції визначають шляхом порівняння значень коефіцієнтів ряду Уолша та змінюють параметри регулятора для цієї зони.
Спосіб визначення функціонального стану дофамінергічної системи мозку
Номер патенту: 64298
Опубліковано: 16.02.2004
Автори: Годлевський Леонід Семенович, Коболєв Євген Володимирович
МПК: A61N 2/04, A61N 5/067, A61B 10/00
Мітки: функціонального, визначення, мозку, дофамінергічної, спосіб, системі, стану
Формула / Реферат:
Спосіб визначення функціонального стану дофамінергічної системи мозку, в основу якого покладено вплив інфрачервоним лазерним випромінюванням низької інтенсивності (ІЛВНІ), який відрізняється тим, що в сагітальній площині на мозок впливають ІЛВНІ 0,89 мкм протягом 5-6,0 хвилин, а також впливають 10-15 імпульсами транскраніальної магнітної стимуляції (ТМС) індукцією магнітного поля на висоті імпульсу в 0,7-0,9 Тл, після чого досліджують...
Збір лікарських рослин №1 для профілактики й лікування захворювань центральної нервової системи та серцево-судинної системи
Номер патенту: 64192
Опубліковано: 16.02.2004
Автор: Павленко Олександр Леонідович
МПК: A61K 36/533, A61K 36/52, A23F 3/34, A61K 36/42, A61K 36/734, A61K 36/84, A61P 25/00, A61K 125/00, A61K 133/00, A61K 36/28, A61P 9/02, A61K 36/53, A61K 36/896, A61K 36/185, A61K 127/00
Мітки: нервової, системі, лікування, рослин, серцево-судинної, захворювань, профілактики, лікарських, збір, центральної
Формула / Реферат:
Збір лікарських рослин для лікування і профілактики захворювань центральної нервової системи та серцево-судинної системи, який містить листя кропиви жалкої, корінь валеріани лікарської, листя мати-й-мачухи, траву буквиці лікарської, листя горіха волоського, квітки й листя деревію, квітки й листя алтеї лікарської, квітки липи серцелистої, квітки й листя буркуну лікарського, квітки ромашки лікарської, траву меліси лікарської, який відрізняється...
Попередній патент: Силовимірювальний прилад
Наступний патент: Пристрій для попереднього дроблення агломерату
Випадковий патент: Спосіб виготовлення овечої бринзи в умовах високогір'я українських карпат