Спосіб керування робочим процесом прямоточної безрешітної молоткової дробарки м.ф.рожківського
Номер патенту: 12694
Опубліковано: 15.02.2006
Автори: Рожківський Микола Францович, Рожківський Олександр Миколаєвич
Формула / Реферат
Спосіб керування робочим процесом прямоточної безрешітної молоткової дробарки, що має вивантажувальний пристрій і суміжну стінку завантажувального і вивантажувального патрубків, яка виконана назустріч обертанню молоткового ротора, а з боку вивантажування вороха обладнана регулювальною заслінкою повітряного потоку, яка з протилежного боку на вході дробильної камери створює напрямок повітряного потоку відносно горизонтальної осі, який змінюється відповідно змінюванню зазору між нижньою кромкою регулювальної заслінки повітряного потоку і траєкторією руху кінців молотків, який відрізняється тим, що під час робочого режиму вказаної дробарки на виході вивантажувального пристрою за допомогою регулювальної заслінки повітряного потоку створюють і підтримують оптимальний тиск повітряного потоку, який дорівнює атмосферному тиску, і зв'язаний відповідно з оптимальним напрямком повітряного потоку відносно горизонтальної осі і оптимальним зазором між нижньою кромкою регулювальної заслінки і траєкторією руху кінців молотків на вході дробильної камери, а при відхиленні від оптимального значення кожного із вказаних параметрів їх одночасно відновлюють шляхом змінювання відповідної величини вказаного зазору, при цьому вказані параметри контролюють і підтримують за допомогою системи автоматики або візуально контролюють появу пилоповітряної суміші на виході вивантажувального пристрою, яку усувають шляхом ручного змінювання відповідної величини вказаного зазору, який визначають за формулою:
 ,
,
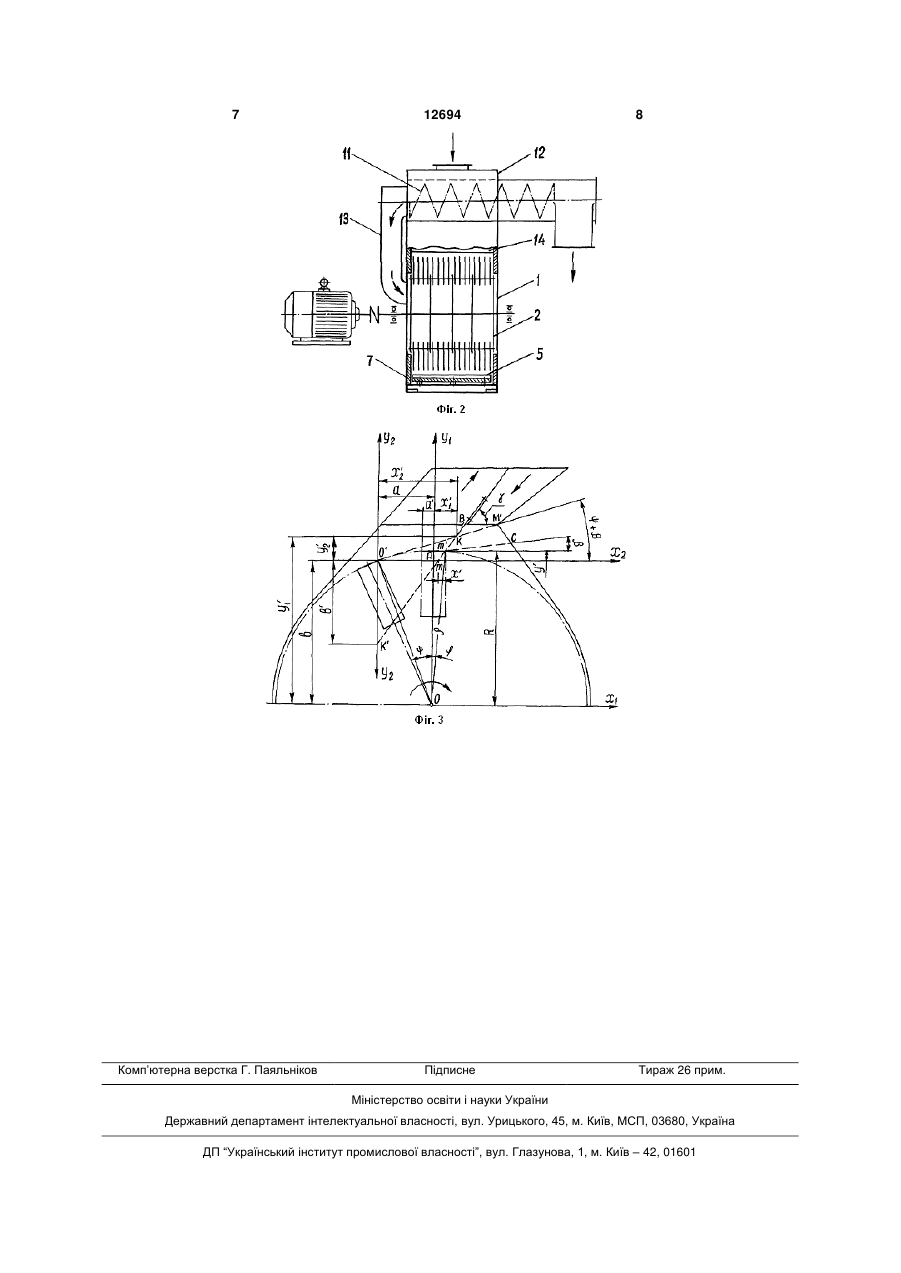
де ![]() - величина оптимального зазору (m'К) між нижньою кромкою регулювальної заслінки і траєкторією руху кінців молотків (фіг. 3), мм;
- величина оптимального зазору (m'К) між нижньою кромкою регулювальної заслінки і траєкторією руху кінців молотків (фіг. 3), мм;
![]() - радіус ротора, який проходить через вершину кута молотка при його верхньому вертикальному положенні, мм;
- радіус ротора, який проходить через вершину кута молотка при його верхньому вертикальному положенні, мм;
![]() - кут між напрямком регулювальної заслінки повітряного потоку (m'В) і віссю абсцис (х2) другої системи декартових координат (х2, у2), градус;
- кут між напрямком регулювальної заслінки повітряного потоку (m'В) і віссю абсцис (х2) другої системи декартових координат (х2, у2), градус;
![]() - кут між віссю ординат (у1) першої системи декартових координат (x1, у1) і радіусом ротора (R), який проходить через вісь кріплення молотків, градус;
- кут між віссю ординат (у1) першої системи декартових координат (x1, у1) і радіусом ротора (R), який проходить через вісь кріплення молотків, градус;
![]() - кут між напрямком повітряного потоку (m'С) і віссю абсцис (х2) другої системи декартових координат (х2, у2) при верхньому положенні молотків, градус;
- кут між напрямком повітряного потоку (m'С) і віссю абсцис (х2) другої системи декартових координат (х2, у2) при верхньому положенні молотків, градус;
![]() - кут між радіусом ротора (R), який проходить через вісь кріплення молотків і радіусом ротора (
- кут між радіусом ротора (R), який проходить через вісь кріплення молотків і радіусом ротора (![]() ), який проходить через вершину переднього кута молотка, градус;
), який проходить через вершину переднього кута молотка, градус;
![]() - сума кутів між оптимальним напрямком повітряного потоку (О'М') і віссю абсцис (х2) другої системи декартових координат (х2, у2), градус.
- сума кутів між оптимальним напрямком повітряного потоку (О'М') і віссю абсцис (х2) другої системи декартових координат (х2, у2), градус.
Текст
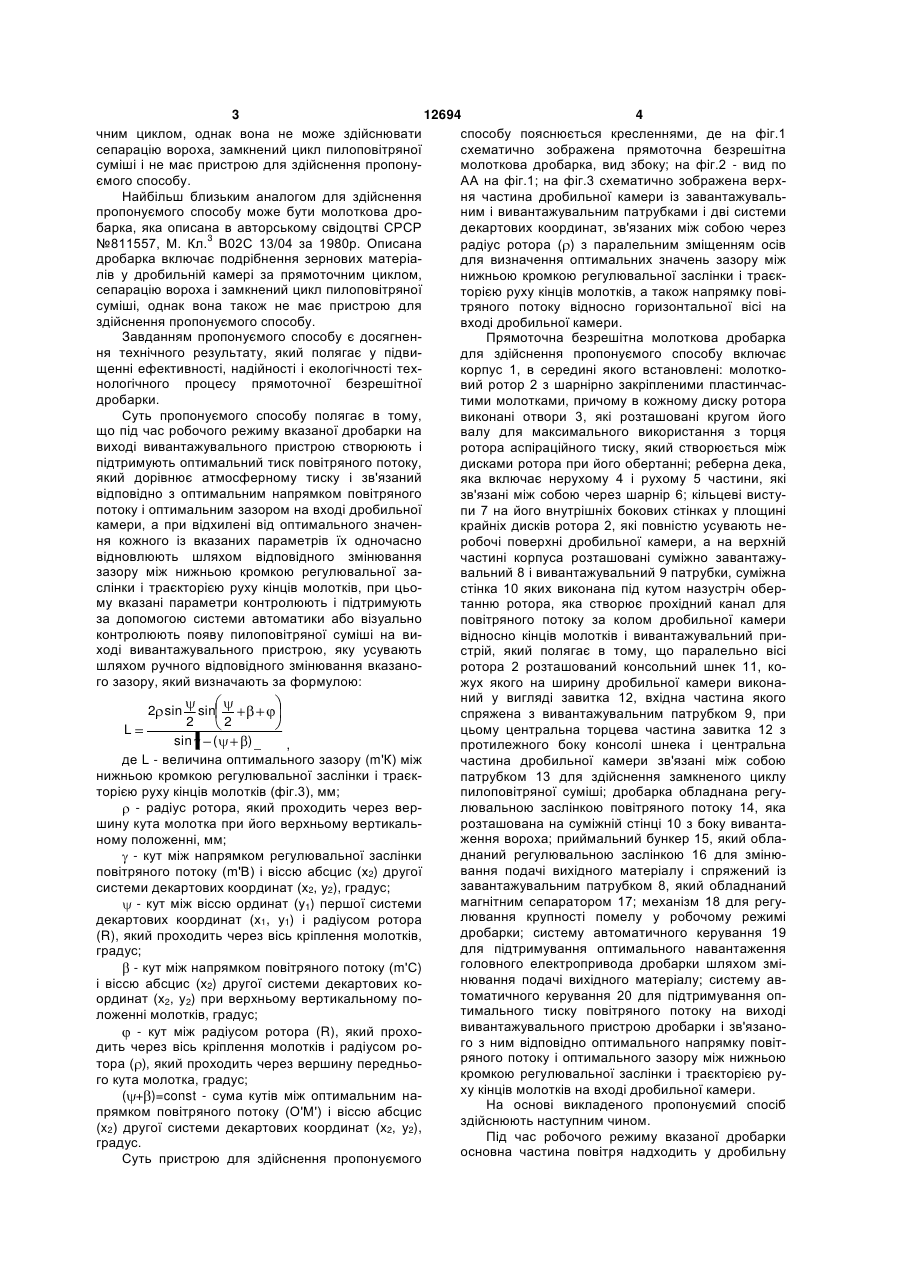
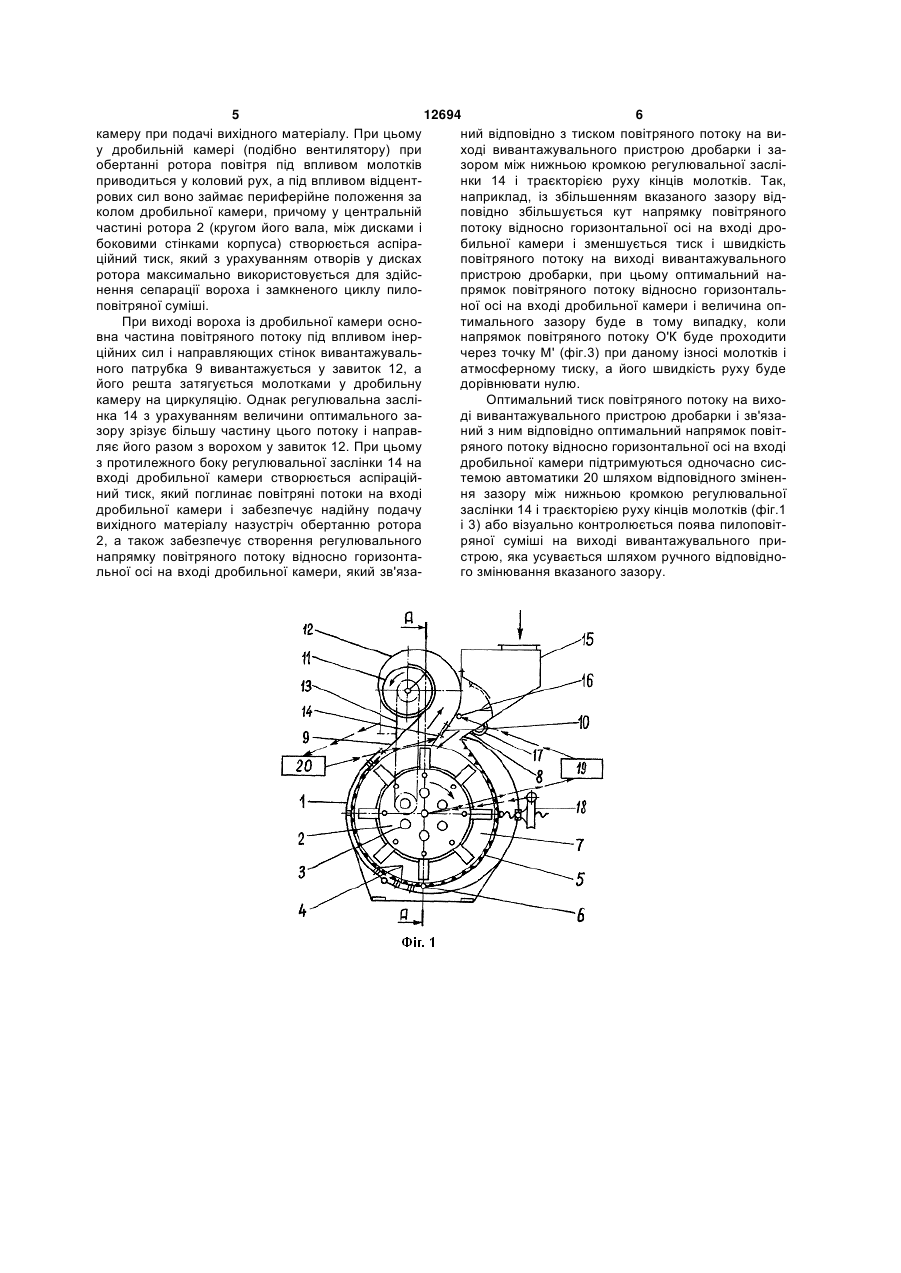
Спосіб керування робочим процесом прямоточної безрешітної молоткової дробарки, що має вивантажувальний пристрій і суміжну стінку завантажувального і вивантажувального патрубків, яка виконана назустріч обертанню молоткового ротора, а з боку вивантажування вороха обладнана регулювальною заслінкою повітряного потоку, яка з протилежного боку на вході дробильної камери створює напрямок повітряного потоку відносно горизонтальної осі, який змінюється відповідно змінюванню зазору між нижньою кромкою регулювальної заслінки повітряного потоку і траєкторією руху кінців молотків, який відрізняється тим, що під час робочого режиму вказаної дробарки на виході вивантажувального пристрою за допомогою регулювальної заслінки повітряного потоку створюють і підтримують оптимальний тиск повітряного потоку, який дорівнює атмосферному тиску, і зв'язаний відповідно з оптимальним напрямком повітряного потоку відносно горизонтальної осі і оптимальним зазором між нижньою кромкою регулювальної заслінки і траєкторією руху кінців молотків на вході дробильної камери, а при відхиленні від оптимального значення кожного із вказаних параметрів їх одночасно відновлюють шляхом змінювання відповідної величини вказаного зазору, при цьому вказані параметри контролюють і підтримують за допомогою системи автоматики або візуально контролюють появу пилоповітряної суміші на виході вивантажувального пристрою, яку усувають шляхом ручного змінювання відповідної величини вказаного зазору, який визначають за формулою: Пропонуємий спосіб відноситься до техніки сільськогосподарського машинобудування і може бути використаний, переважно, у сільськогосподарському виробництві і на підприємствах комбікормової промисловості та інших галузях народного господарства. Аналогом для здійснення пропонуємого способу може бути молоткова дробарка, яка описана в авторському свідоцтві СРСР №803973, М. Кл.3 В02С 13/04 за 1980р. Описана дробарка включає подрібнення зернових матеріалів у дробильній камері за прямото (13) 12694 (11) (19) UA sin 2 2 , L sin ( ) де L - величина оптимального зазору (m'К) між нижньою кромкою регулювальної заслінки і траєкторією руху кінців молотків (фіг. 3), мм; - радіус ротора, який проходить через вершину кута молотка при його верхньому вертикальному положенні, мм; - кут між напрямком регулювальної заслінки повітряного потоку (m'В) і віссю абсцис (х2) другої системи декартових координат (х2, у2), градус; - кут між віссю ординат (у1) першої системи декартових координат (x1, у1) і радіусом ротора (R), який проходить через вісь кріплення молотків, градус; - кут між напрямком повітряного потоку (m'С) і віссю абсцис (х2) другої системи декартових координат (х2, у2) при верхньому положенні молотків, градус; - кут між радіусом ротора (R), який проходить через вісь кріплення молотків і радіусом ротора ( ), який проходить через вершину переднього кута молотка, градус; ( ) const - сума кутів між оптимальним напрямком повітряного потоку (О'М') і віссю абсцис (х2) другої системи декартових координат (х2, у2), градус. U 2 sin 3 12694 4 чним циклом, однак вона не може здійснювати способу пояснюється кресленнями, де на фіг.1 сепарацію вороха, замкнений цикл пилоповітряної схематично зображена прямоточна безрешітна суміші і не має пристрою для здійснення пропонумолоткова дробарка, вид збоку; на фіг.2 - вид по ємого способу. АА на фіг.1; на фіг.3 схематично зображена верхНайбільш близьким аналогом для здійснення ня частина дробильної камери із завантажувальпропонуємого способу може бути молоткова дроним і вивантажувальним патрубками і дві системи барка, яка описана в авторському свідоцтві СРСР декартових координат, зв'язаних між собою через №811557, М. Кл.3 В02С 13/04 за 1980р. Описана радіус ротора ( ) з паралельним зміщенням осів дробарка включає подрібнення зернових матеріадля визначення оптимальних значень зазору між лів у дробильній камері за прямоточним циклом, нижньою кромкою регулювальної заслінки і траєксепарацію вороха і замкнений цикл пилоповітряної торією руху кінців молотків, а також напрямку повісуміші, однак вона також не має пристрою для тряного потоку відносно горизонтальної вісі на здійснення пропонуємого способу. вході дробильної камери. Завданням пропонуємого способу є досягненПрямоточна безрешітна молоткова дробарка ня технічного результату, який полягає у підвидля здійснення пропонуємого способу включає щенні ефективності, надійності і екологічності техкорпус 1, в середині якого встановлені: молотконологічного процесу прямоточної безрешітної вий ротор 2 з шарнірно закріпленими пластинчасдробарки. тими молотками, причому в кожному диску ротора Суть пропонуємого способу полягає в тому, виконані отвори 3, які розташовані кругом його що під час робочого режиму вказаної дробарки на валу для максимального використання з торця виході вивантажувального пристрою створюють і ротора аспіраційного тиску, який створюється між підтримують оптимальний тиск повітряного потоку, дисками ротора при його обертанні; реберна дека, який дорівнює атмосферному тиску і зв'язаний яка включає нерухому 4 і рухому 5 частини, які відповідно з оптимальним напрямком повітряного зв'язані між собою через шарнір 6; кільцеві виступотоку і оптимальним зазором на вході дробильної пи 7 на його внутрішніх бокових стінках у площині камери, а при відхилені від оптимального значенкрайніх дисків ротора 2, які повністю усувають неня кожного із вказаних параметрів їх одночасно робочі поверхні дробильної камери, а на верхній відновлюють шляхом відповідного змінювання частині корпуса розташовані суміжно завантажузазору між нижньою кромкою регулювальної завальний 8 і вивантажувальний 9 патрубки, суміжна слінки і траєкторією руху кінців молотків, при цьостінка 10 яких виконана під кутом назустріч оберму вказані параметри контролюють і підтримують танню ротора, яка створює прохідний канал для за допомогою системи автоматики або візуально повітряного потоку за колом дробильної камери контролюють появу пилоповітряної суміші на вивідносно кінців молотків і вивантажувальний приході вивантажувального пристрою, яку усувають стрій, який полягає в тому, що паралельно вісі шляхом ручного відповідного змінювання вказаноротора 2 розташований консольний шнек 11, кого зазору, який визначають за формулою: жух якого на ширину дробильної камери виконаний у вигляді завитка 12, вхідна частина якого 2 sin sin спряжена з вивантажувальним патрубком 9, при 2 2 цьому центральна торцева частина завитка 12 з L sin ( ) , протилежного боку консолі шнека і центральна де L - величина оптимального зазору (m'К) між частина дробильної камери зв'язані між собою нижньою кромкою регулювальної заслінки і траєкпатрубком 13 для здійснення замкненого циклу торією руху кінців молотків (фіг.3), мм; пилоповітряної суміші; дробарка обладнана регулювальною заслінкою повітряного потоку 14, яка - радіус ротора, який проходить через веррозташована на суміжній стінці 10 з боку виванташину кута молотка при його верхньому вертикальження вороха; приймальний бункер 15, який обланому положенні, мм; днаний регулювальною заслінкою 16 для зміню- кут між напрямком регулювальної заслінки вання подачі вихідного матеріалу і спряжений із повітряного потоку (m'В) і віссю абсцис (х2) другої завантажувальним патрубком 8, який обладнаний системи декартових координат (х2, у2), градус; магнітним сепаратором 17; механізм 18 для регу- кут між віссю ординат (у1) першої системи лювання крупності помелу у робочому режимі декартових координат (х1, у1) і радіусом ротора дробарки; систему автоматичного керування 19 (R), який проходить через вісь кріплення молотків, для підтримування оптимального навантаження градус; головного електропривода дробарки шляхом змі- кут між напрямком повітряного потоку (m'С) нювання подачі вихідного матеріалу; систему аві віссю абсцис (х2) другої системи декартових котоматичного керування 20 для підтримування опординат (х2, у2) при верхньому вертикальному потимального тиску повітряного потоку на виході ложенні молотків, градус; вивантажувального пристрою дробарки і зв'язано- кут між радіусом ротора (R), який прохого з ним відповідно оптимального напрямку повітдить через вісь кріплення молотків і радіусом роряного потоку і оптимального зазору між нижньою тора ( ), який проходить через вершину передньокромкою регулювальної заслінки і траєкторією руго кута молотка, градус; ху кінців молотків на вході дробильної камери. ( + )=const - сума кутів між оптимальним наНа основі викладеного пропонуємий спосіб прямком повітряного потоку (О'М') і віссю абсцис здійснюють наступним чином. (x2) другої системи декартових координат (х2, у2), Під час робочого режиму вказаної дробарки градус. основна частина повітря надходить у дробильну Суть пристрою для здійснення пропонуємого 5 12694 6 камеру при подачі вихідного матеріалу. При цьому ний відповідно з тиском повітряного потоку на виу дробильній камері (подібно вентилятору) при ході вивантажувального пристрою дробарки і заобертанні ротора повітря під впливом молотків зором між нижньою кромкою регулювальної засліприводиться у коловий рух, а під впливом відцентнки 14 і траєкторією руху кінців молотків. Так, рових сил воно займає периферійне положення за наприклад, із збільшенням вказаного зазору відколом дробильної камери, причому у центральній повідно збільшується кут напрямку повітряного частині ротора 2 (кругом його вала, між дисками і потоку відносно горизонтальної осі на вході дробоковими стінками корпуса) створюється аспірабильної камери і зменшується тиск і швидкість ційний тиск, який з урахуванням отворів у дисках повітряного потоку на виході вивантажувального ротора максимально використовується для здійспристрою дробарки, при цьому оптимальний нанення сепарації вороха і замкненого циклу пилопрямок повітряного потоку відносно горизонтальповітряної суміші. ної осі на вході дробильної камери і величина опПри виході вороха із дробильної камери оснотимального зазору буде в тому випадку, коли вна частина повітряного потоку під впливом інернапрямок повітряного потоку О'К буде проходити ційних сил і направляющих стінок вивантажувальчерез точку М' (фіг.3) при даному ізносі молотків і ного патрубка 9 вивантажується у завиток 12, а атмосферному тиску, а його швидкість руху буде його решта затягується молотками у дробильну дорівнювати нулю. камеру на циркуляцію. Однак регулювальна засліОптимальний тиск повітряного потоку на вихонка 14 з урахуванням величини оптимального заді вивантажувального пристрою дробарки і зв'язазору зрізує більшу частину цього потоку і направний з ним відповідно оптимальний напрямок повітляє його разом з ворохом у завиток 12. При цьому ряного потоку відносно горизонтальної осі на вході з протилежного боку регулювальної заслінки 14 на дробильної камери підтримуються одночасно сисвході дробильної камери створюється аспіраційтемою автоматики 20 шляхом відповідного зміненний тиск, який поглинає повітряні потоки на вході ня зазору між нижньою кромкою регулювальної дробильної камери і забезпечує надійну подачу заслінки 14 і траєкторією руху кінців молотків (фіг.1 вихідного матеріалу назустріч обертанню ротора і 3) або візуально контролюється поява пилоповіт2, а також забезпечує створення регулювального ряної суміші на виході вивантажувального принапрямку повітряного потоку відносно горизонтастрою, яка усувається шляхом ручного відповіднольної осі на вході дробильної камери, який зв'язаго змінювання вказаного зазору. 7 Комп’ютерна верстка Г. Паяльніков 12694 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of control of working process of rozhkivskyi's direct-flow grateless hammer mill
Назва патенту російськоюСпособ управл5ения рабочим процессом прямоточной безрешеточной молотковой дробилки м.ф.рожковского
МПК / Мітки
МПК: B02C 25/00
Мітки: молоткової, прямоточної, м.ф.рожківського, процесом, дробарки, керування, спосіб, робочим, безрешітної
Код посилання
<a href="https://ua.patents.su/4-12694-sposib-keruvannya-robochim-procesom-pryamotochno-bezreshitno-molotkovo-drobarki-mfrozhkivskogo.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування робочим процесом прямоточної безрешітної молоткової дробарки м.ф.рожківського</a>
Молоткова дробарка м.ф.рожківського
Номер патенту: 12697
Опубліковано: 15.02.2006
Автори: Рожківський Микола Францович, Рожківський Олександр Миколаєвич
МПК: B02C 25/00
Мітки: молоткова, дробарка, м.ф.рожківського
Формула / Реферат:
Молоткова дробарка, яка містить корпус, всередині якого встановлений молотковий ротор і реберна дека, а на його верхній частині розташовані суміжно завантажувальний і вивантажувальний патрубки, суміжна стінка яких виконана під кутом назустріч обертанню ротора, і вивантажувальний пристрій у вигляді завитка на ширину дробильної камери з консольним шнеком, розташованим всередині завитка, порожнина якого зв'язана з дробильною камерою через...
Молоток молоткової дробарки

Номер патенту: 58860
Опубліковано: 15.08.2003
Автори: Романюк Ігор Васильович, Сагінор Олександр Григорович, Шликов Миколай Егорович, Рафальский Павло Миколайович, Сова Василь Гаврилович, П'янков Вадим Валерійович
МПК: B02C 13/28
Мітки: дробарки, молоток, молоткової
Формула / Реферат:
Молоток молоткової дробарки, який містить основне тіло, на поверхнях якого виконані пази, і пластину з отвором для кріплення його на осі, який відрізняється тим, що основне тіло молотка виконане у вигляді сполучення трьох частин, причому бічні стінки верхньої і нижньої частин виконані так, що вони розходяться до торцевої поверхні основного тіла, а відношення висоти верхньої частини до висоти основного тіла молотка дорівнює 0,071- 0,75.
Молоток молоткової дробарки

Номер патенту: 3117
Опубліковано: 15.10.2004
Автори: Сугоняко Леонід Петрович, Сагінор Олександр Григорович, Сова Василь Гаврилович, Кісс Михайло Яковлевич, Старун Євгеній Петрович
МПК: B02C 13/28
Мітки: дробарки, молоток, молоткової
Формула / Реферат:
Молоток молоткової дробарки, що містить основне тіло, на бічних поверхнях якого виконані пази, і пластину з отвором для кріплення його на осі, який відрізняється тим, що на торцевій поверхні основного тіла молотка виконані виступи, орієнтовані перпендикулярно осі обертання молотка, причому відношення висоти виступу до висоти основного тіла становить 0,025-0,5.
Молоток роторної молоткової дробарки

Номер патенту: 57949
Опубліковано: 15.07.2003
Автори: Рубчевський Валерій Миколайович, Дерев'янченко Олександр Миколайович, Сагінор Олександр Григорович, Єрмак Юрій Володимирович, Мартинюк Валентин Трофимович
МПК: B02C 13/28
Мітки: роторної, молоток, дробарки, молоткової
Формула / Реферат:
Молоток роторної молоткової дробарки, який містить основне тіло, на поверхнях якого виконані пази, і пластину з отвором для кріплення його на осі, який відрізняється тим, що основне тіло молотка виконане від площини, яка проходить через його торцеву поверхню, причому відношення площі поздовжнього перерізу основного тіла до площі поздовжнього перерізу молотка дорівнює у межах 0,3-0,54.
Система автоматичного керування процесом горіння
Номер патенту: 53941
Опубліковано: 17.02.2003
Автори: Бегунов Микола Павлович, Кашина Тетяна Олександрівна, Кашин Володимир Іванович, Грунський Віталій Павлович
МПК: F23N 1/02
Мітки: процесом, автоматичного, горіння, система, керування
Формула / Реферат:
Система автоматичного керування процесом горіння, що містить з'єднані в технологічній послідовності пальник, електроди підпалювання та наявності полум'я, трансформатор, автомат керування роботою пальника, клапан-відсікач газу, регулятор співвідношення газ/повітря, дросельну заслінку з електроприводом та перетворювач термоелектричний, яка відрізняється тим, що в електричний ланцюг регулювання потужності пальника введено мікропроцесорний...
Попередній патент: Твердий гідратований подвійний аміачний пірофосфат нікелю(іі)-кадмію
Наступний патент: Спосіб приготування комбікормів в умовах господарств м.ф.рожківського
Випадковий патент: Спосіб визначення групи ризику виникнення післяопераційних септичних ускладнень у хворих з ургентною абдомінальною патологією