Спосіб безперервного пересування транспортного засобу з колісно-кроковим рушієм у колісно-кроковому режимі
Формула / Реферат
1. Спосіб безперервного пересування транспортного засобу з колісно-кроковим рушієм у колісно-кроковому режимі, що включає послідовне переміщення коліс по опорній поверхні у фазі переносу у ведучому режимі, а потім включення крокового ходу коліс, який відрізняється тим, що застосовують рушій з колісно-кроковим важелем, складеним з двох важелів, з'єднаних з корпусом шарнірно і за допомогою пружин, що визначають вихідне положення важелів, кожен з яких містить зубчасту передачу приводу опорного колеса за типом планетарної передачі з двома послідовно з'єднаними сателітами при співвідношенні кількості зубців центрального колеса Z1 і периферійного сателіта Z3-(Z1/Z3>1), причому пружини, які визначають вихідне положення важелів, встановлюють у двох фіксованих положеннях, що відповідають двом режимам роботи рушія: колісно-кроковому - при діючому приводі переміщення важелів, і режиму переїзду дорожніх перешкод, порогових, який відбувається автоматично за рахунок дії зростаючого при переїзді моменту обертання опорного колеса заднього, по ходу руху важеля, здійснюючого разом із переднім важелем поворот навколо точки їх шарнірного з'єднання і в'їзд на поверхню перешкоди незалежно від фаз роботи рушія, після переїзду важелі за допомогою пружин повертаються у вихідне положення.
2. Спосіб за п. 1, який відрізняється тим, що в колісно-кроковому режимі роботи рушія положення важелів щодо контакту з опорною поверхнею і відносно фаз колісно-крокового руху рушія змінюють шляхом притиску до опорної поверхні опорного колеса переднього по ходу руху важеля реактивним моментом, що діє відносно точки шарнірного з’єднання важелів і визначається моментом, заданим на осі шестірні приводу опорних коліс.
3. Спосіб за п. 1, який відрізняється тим, що в колісно-кроковому режимі роботи рушія застосовують у фазі крокового руху схему передачі крокового моменту на передній по ходу руху важіль з заблокованими опорними колесами за допомогою гальма, встановленого на осі шестірні приводу опорного колеса.
4. Спосіб за п. 1 який відрізняється тим, що на рушії, який працює в колісному режимі роботи, встановлюють залежно від дорожніх умов положення важеля режиму роботи: І - при роботі з підвищеною силою тяги, II - при переїзді дорожніх перешкод, порогових.
Текст
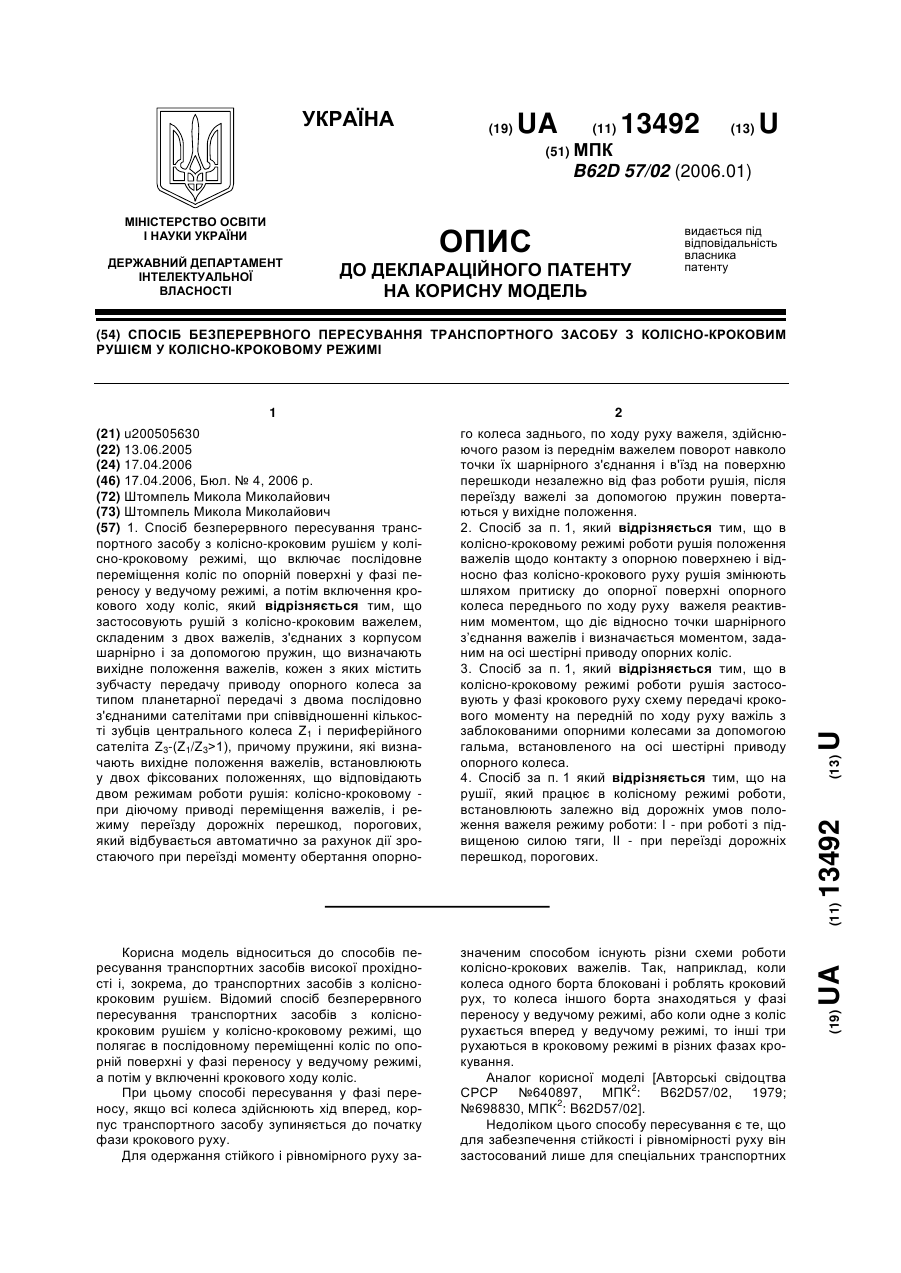
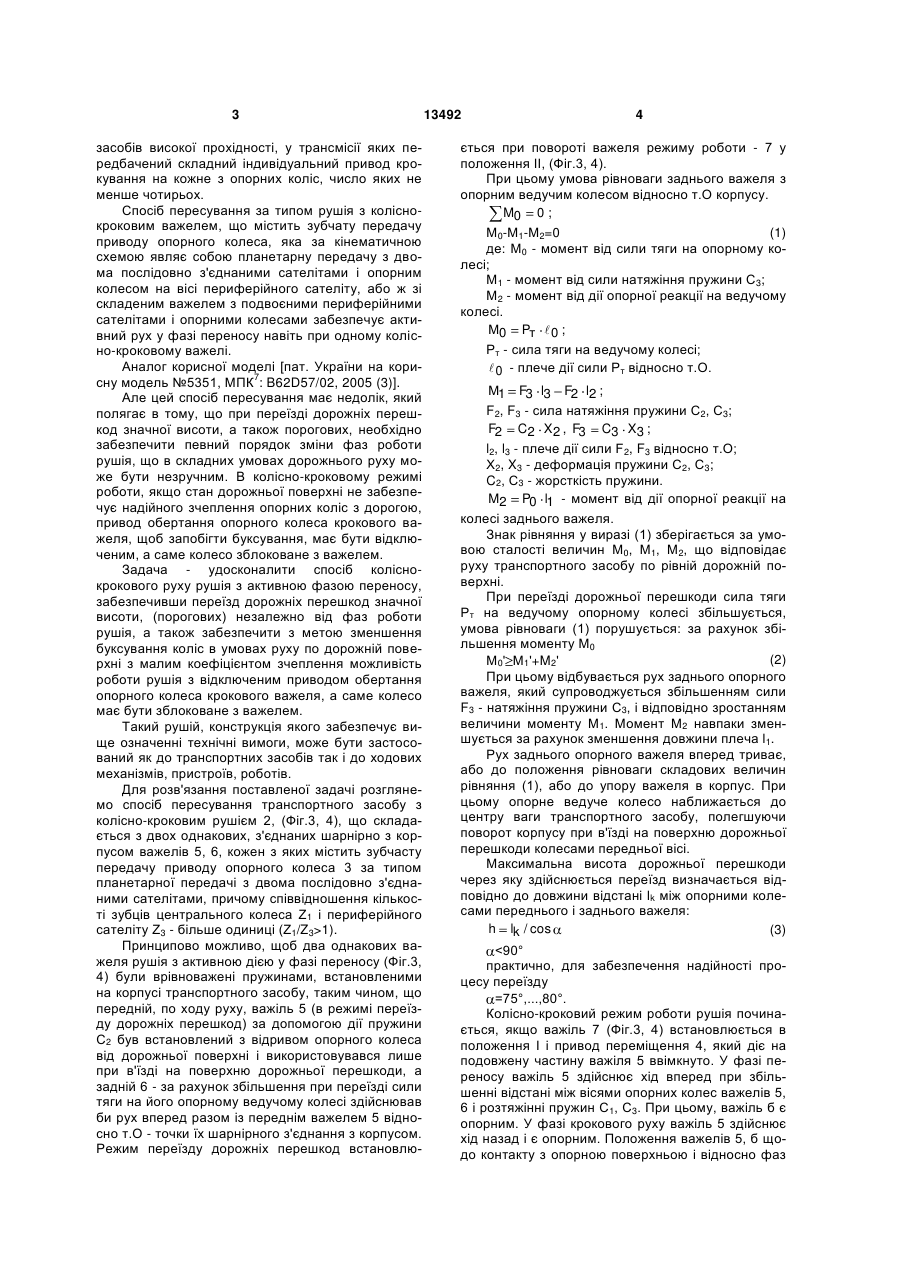
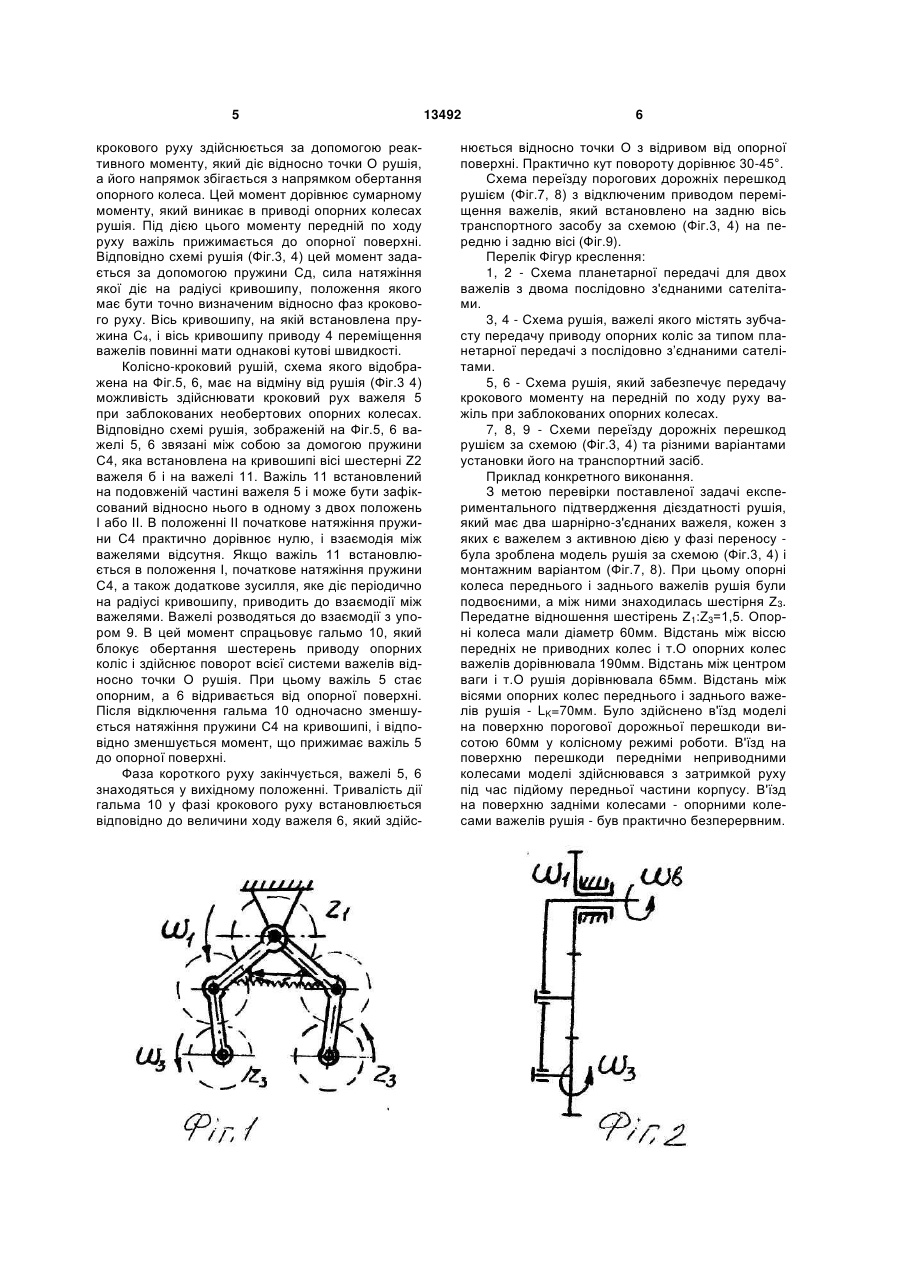
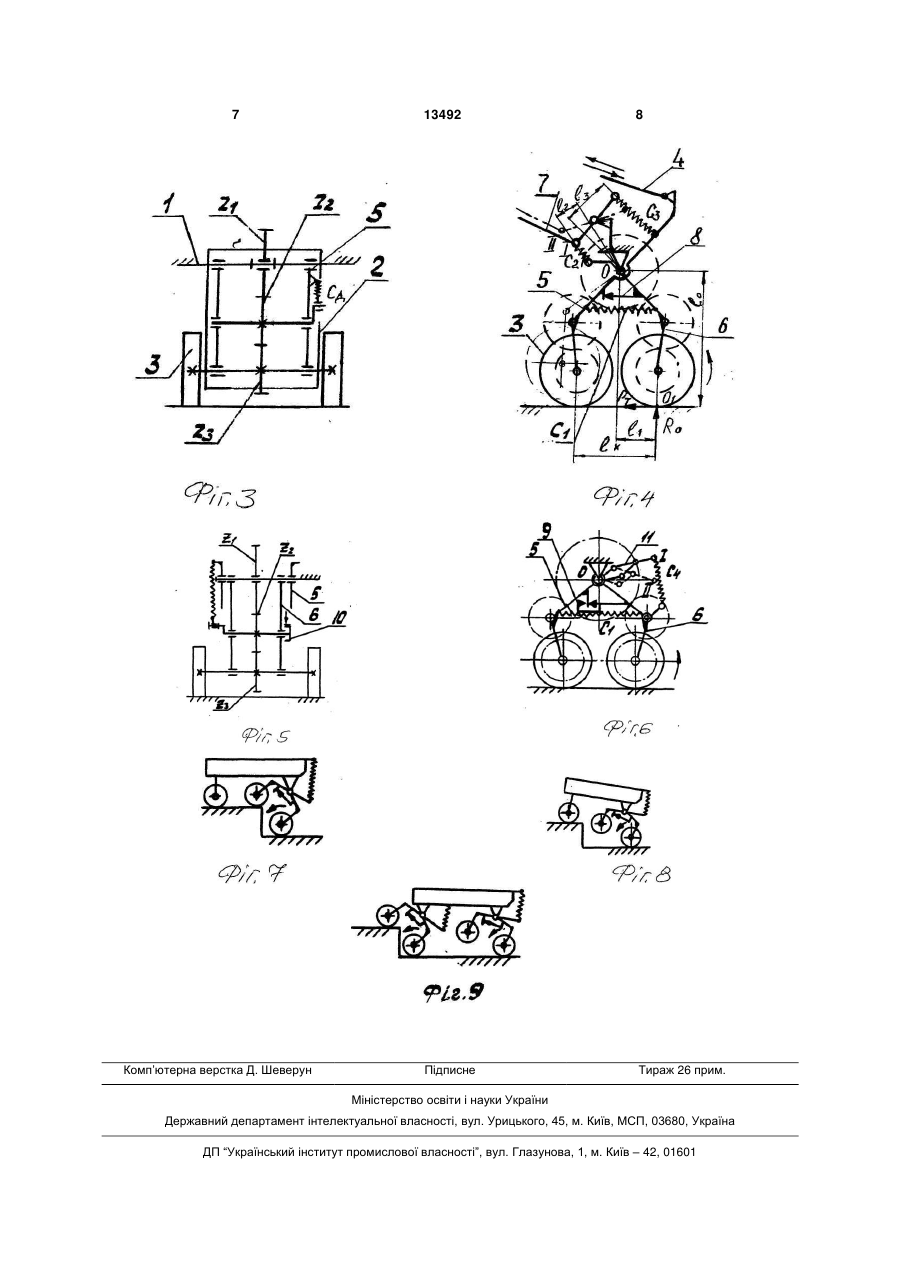
1. Спосіб безперервного пересування транспортного засобу з колісно-кроковим рушієм у колісно-кроковому режимі, що включає послідовне переміщення коліс по опорній поверхні у фазі переносу у ведучому режимі, а потім включення крокового ходу коліс, який відрізняється тим, що застосовують рушій з колісно-кроковим важелем, складеним з двох важелів, з'єднаних з корпусом шарнірно і за допомогою пружин, що визначають вихідне положення важелів, кожен з яких містить зубчасту передачу приводу опорного колеса за типом планетарної передачі з двома послідовно з'єднаними сателітами при співвідношенні кількості зубців центрального колеса Z1 і периферійного сателіта Z3-(Z1/Z3>1), причому пружини, які визначають вихідне положення важелів, встановлюють у двох фіксованих положеннях, що відповідають двом режимам роботи рушія: колісно-кроковому при діючому приводі переміщення важелів, і режиму переїзду дорожніх перешкод, порогових, який відбувається автоматично за рахунок дії зростаючого при переїзді моменту обертання опорно 3 засобів високої прохідності, у трансмісії яких передбачений складний індивідуальний привод крокування на кожне з опорних коліс, число яких не менше чотирьох. Спосіб пересування за типом рушія з коліснокроковим важелем, що містить зубчату передачу приводу опорного колеса, яка за кінематичною схемою являє собою планетарну передачу з двома послідовно з'єднаними сателітами і опорним колесом на вісі периферійного сателіту, або ж зі складеним важелем з подвоєними периферійними сателітами і опорними колесами забезпечує активний рух у фазі переносу навіть при одному колісно-кроковому важелі. Аналог корисної моделі [пат. України на корисну модель №5351, МПК7: B62D57/02, 2005 (3)]. Але цей спосіб пересування має недолік, який полягає в тому, що при переїзді дорожніх перешкод значної висоти, а також порогових, необхідно забезпечити певний порядок зміни фаз роботи рушія, що в складних умовах дорожнього руху може бути незручним. В колісно-кроковому режимі роботи, якщо стан дорожньої поверхні не забезпечує надійного зчеплення опорних коліс з дорогою, привод обертання опорного колеса крокового важеля, щоб запобігти буксування, має бути відключеним, а саме колесо зблоковане з важелем. Задача - удосконалити спосіб коліснокрокового руху рушія з активною фазою переносу, забезпечивши переїзд дорожніх перешкод значної висоти, (порогових) незалежно від фаз роботи рушія, а також забезпечити з метою зменшення буксування коліс в умовах руху по дорожній поверхні з малим коефіцієнтом зчеплення можливість роботи рушія з відключеним приводом обертання опорного колеса крокового важеля, а саме колесо має бути зблоковане з важелем. Такий рушій, конструкція якого забезпечує вище означенні технічні вимоги, може бути застосований як до транспортних засобів так і до ходових механізмів, пристроїв, роботів. Для розв'язання поставленої задачі розглянемо спосіб пересування транспортного засобу з колісно-кроковим рушієм 2, (Фіг.3, 4), що складається з двох однакових, з'єднаних шарнірно з корпусом важелів 5, 6, кожен з яких містить зубчасту передачу приводу опорного колеса 3 за типом планетарної передачі з двома послідовно з'єднаними сателітами, причому співвідношення кількості зубців центрального колеса Z1 і периферійного сателіту Z3 - більше одиниці (Z1/Z3>1). Принципово можливо, щоб два однакових важеля рушія з активною дією у фазі переносу (Фіг.3, 4) були врівноважені пружинами, встановленими на корпусі транспортного засобу, таким чином, що передній, по ходу руху, важіль 5 (в режимі переїзду дорожніх перешкод) за допомогою дії пружини С2 був встановлений з відривом опорного колеса від дорожньої поверхні і використовувався лише при в'їзді на поверхню дорожньої перешкоди, а задній 6 - за рахунок збільшення при переїзді сили тяги на його опорному ведучому колесі здійснював би рух вперед разом із переднім важелем 5 відносно т.О - точки їх шарнірного з'єднання з корпусом. Режим переїзду дорожніх перешкод встановлю 13492 4 ється при повороті важеля режиму роботи - 7 у положення II, (Фіг.3, 4). При цьому умова рівноваги заднього важеля з опорним ведучим колесом відносно т.О корпусу. M0 0 ; М0-М1-М2=0 (1) де: М0 - момент від сили тяги на опорному колесі; М1 - момент від сили натяжіння пружини С3; М2 - момент від дії опорної реакції на ведучому колесі. М0 Pт 0 ; Рт - сила тяги на ведучому колесі; 0 - плече дії сили Рт відносно т.О. М1 F3 l3 F2 l2 ; F2, F3 - сила натяжіння пружини С2, С3; F2 C2 X2 , F3 C3 X3 ; l2, l3 - плече дії сили F2, F3 відносно т.О; Х2, X3 - деформація пружини C2, С3; C2, С3 - жорсткість пружини. M2 P0 l1 - момент від дії опорної реакції на колесі заднього важеля. Знак рівняння у виразі (1) зберігається за умовою сталості величин М0, М1, М2, що відповідає руху транспортного засобу по рівній дорожній поверхні. При переїзді дорожньої перешкоди сила тяги Рт на ведучому опорному колесі збільшується, умова рівноваги (1) порушується: за рахунок збільшення моменту М0 (2) М0' М1'+M2' При цьому відбувається рух заднього опорного важеля, який супроводжується збільшенням сили F3 - натяжіння пружини С3, і відповідно зростанням величини моменту М1. Момент М2 навпаки зменшується за рахунок зменшення довжини плеча l1. Рух заднього опорного важеля вперед триває, або до положення рівноваги складових величин рівняння (1), або до упору важеля в корпус. При цьому опорне ведуче колесо наближається до центру ваги транспортного засобу, полегшуючи поворот корпусу при в'їзді на поверхню дорожньої перешкоди колесами передньої вісі. Максимальна висота дорожньої перешкоди через яку здійснюється переїзд визначається відповідно до довжини відстані lk між опорними колесами переднього і заднього важеля: h lk / cos (3)
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of continuous movement of transport facility with wheel-step propeller in the wheel-step mode
Автори англійськоюShtompel Mykola Mykolaiovych
Назва патенту російськоюСпособ непрерывного передвижения транспортного средства с колесно-шаговым движителем в колесно-шаговом режиме
Автори російськоюШтомпель Николай Николаевич
МПК / Мітки
МПК: B62D 57/00
Мітки: транспортного, пересування, рушієм, режимі, безперервного, колісно-кроковому, колісно-кроковим, засобу, спосіб
Код посилання
<a href="https://ua.patents.su/4-13492-sposib-bezperervnogo-peresuvannya-transportnogo-zasobu-z-kolisno-krokovim-rushiehm-u-kolisno-krokovomu-rezhimi.html" target="_blank" rel="follow" title="База патентів України">Спосіб безперервного пересування транспортного засобу з колісно-кроковим рушієм у колісно-кроковому режимі</a>
Спосіб безперервного пересування транспортного засобу з колісно-кроковим рушієм у колісно-кроковому режимі
Номер патенту: 5351
Опубліковано: 15.03.2005
Автор: Штомпель Микола Миколайович
МПК: B62D 57/00
Мітки: транспортного, режимі, колісно-кроковому, рушієм, спосіб, колісно-кроковим, засобу, пересування, безперервного
Формула / Реферат:
1. Спосіб безперервного пересування транспортного засобу з колісно-кроковим рушієм у колісно-кроковому режимі, що полягає у послідовному переміщенні коліс по опорній поверхні у фазі переносу у ведучому режимі, а потім у включенні крокового ходу коліс, який відрізняється тим, що для забезпечення стійкості колісно-крокового руху і здійснення активного і безперервного руху транспортного засобу у фазі переносу застосований рушій з...
Спосіб пересування транспортного засобу та двигун для його здійснення
Номер патенту: 51692
Опубліковано: 16.12.2002
Автор: Дешко Ігор Віталійович
МПК: F03G 3/00
Мітки: пересування, засобу, спосіб, транспортного, здійснення, двигун
Формула / Реферат:
1. Спосіб пересування транспортного засобу, що полягає у перетворюванні впливу інерційних мас в односпрямоване пересування транспортного засобу шляхом взаємодії інерційних мас, які рухаються, з інерційними елементами, що встановлені на корпусі, який відрізняється тим, що інерційні маси переміщують примусово в системі відліку обертових інерційних елементів.2. Двигун для пересування транспортного засобу, який містить корпус, зв'язаний з...
Упор для капота транспортного засобу
Номер патенту: 72652
Опубліковано: 15.03.2005
Автор: Кін Ерік Алберт
МПК: B62D 25/10
Мітки: засобу, капота, упор, транспортного
Формула / Реферат:
1. Упор (14) для капота (10) транспортного засобу, до якого капот (10) приєднано з можливістю повороту відносно осі обертання, що містить:перший важіль (16), що має один кінець, приєднаний до транспортного засобу з можливістю повороту відносно осі обертання, і другий кінець,другий важіль (30), що має один кінець, з'єднаний з другим кінцем першого важеля (16) з можливістю обертання, і другий кінець,підіймальний стержень...
Рухомий буй з плавцевим рушієм
Номер патенту: 44208
Опубліковано: 15.01.2002
Автори: Майстер Валентин Іванович, Мороз Володимир Василійович, Поліщук Сергій Володимирович, Бабенко Віктор Віталійович, Коробов Віталій Ілліч
МПК: B63H 1/36
Мітки: рушієм, рухомий, плавцевим, буй
Формула / Реферат:
Рухомий буй з плавцевим рушієм, який відрізняється тим, що містить корпус буя, у якому розташований електродвигун поворотного типу з фігурним важелем, розміщеним в порожнині та з'єднаним з ковпаком, в якому також розміщений електродвигун поворотного типу, на вихідному валу якого закріплений важіль з електродвигуном коливального руху, стеблом та плавцевим рушієм.
Ходова частина транспортного засобу

Номер патенту: 56349
Опубліковано: 15.05.2003
Автори: Пономарьов Євген Павлович, Устименко Євген Іванович
МПК: B62D 55/08
Мітки: засобу, частина, транспортного, ходова
Формула / Реферат:
1. Ходова частина транспортного засобу, яка має пружну підвіску у вигляді опорного котка, встановленого на нижній осі важеля, що хитається відносно верхньої осі, розташованої в корпусі транспортного засобу, та пристрій блокування підвіски, що містить в собі штангу, шарнірно з'єднану одним кінцем з важелем, а другим - жорстко з кронштейном, закріпленим на корпусі транспортного засобу, яка відрізняється тим, що штанга та кронштейн виконані...
Попередній патент: Пристрій для діагностування несправностей технічних об`єктів
Наступний патент: П’єзоелектричний перетворювач механічних величин
Випадковий патент: Спосіб визначення пероксомоносульфату методом вольтамперометрії