Спосіб безперервного пересування транспортного засобу з колісно-кроковим рушієм у колісно-кроковому режимі
Формула / Реферат
1. Спосіб безперервного пересування транспортного засобу з колісно-кроковим рушієм у колісно-кроковому режимі, що полягає у послідовному переміщенні коліс по опорній поверхні у фазі переносу у ведучому режимі, а потім у включенні крокового ходу коліс, який відрізняється тим, що для забезпечення стійкості колісно-крокового руху і здійснення активного і безперервного руху транспортного засобу у фазі переносу застосований рушій з колісно-кроковим важелем, кінематична схема розташованої на ньому зубчастої передачі приводу опорного колеса являє собою планетарну передачу із двома послідовно з'єднаними сателітами і забезпечує зростання швидкості обертання опорного колеса у фазі переносу, якщо передатне відношення зубців центрального колеса ![]() і периферійного сателіта
і периферійного сателіта ![]() на осі опорного колеса
на осі опорного колеса![]()
2. Спосіб за п. 1, який відрізняється тим, що для забезпечення стійкості руху колісно-кроковий важіль має два опорних колеса, з'єднаних важелем з віссю проміжного сателіта, причому положення цих важелів має бути визначеним відповідно до фаз колісно-крокового руху, так задній по ходу руху важіль у фазі переносу є опорним, а передній має можливість здійснювати вільний хід вперед відносно заднього, що дозволяє обом важелям незалежно установлюватися на дорожній поверхні будь-якої форми; у фазі крокового руху - кроковий хід здійснює передній важіль, який є опорним.
3. Спосіб за п. 1, який відрізняється тим, що для підвищення рівномірності руху в колісно-кроковому режимі відстань між передньою і задньою віссю транспортного засобу має дорівнювати пройденому шляху під час зміни фаз колісно-крокового руху.
4. Спосіб за п. 1, який відрізняється тим, що на рушії з активною фазою переносу, який працює в колісному режимі роботи, встановлюють в залежності від дорожніх умов певне і зафіксоване положення його колісно-крокових важелів: у фазі крокування при роботі з підвищеною силою тяги, у фазі переносу в умовах бездоріжжя.
Текст
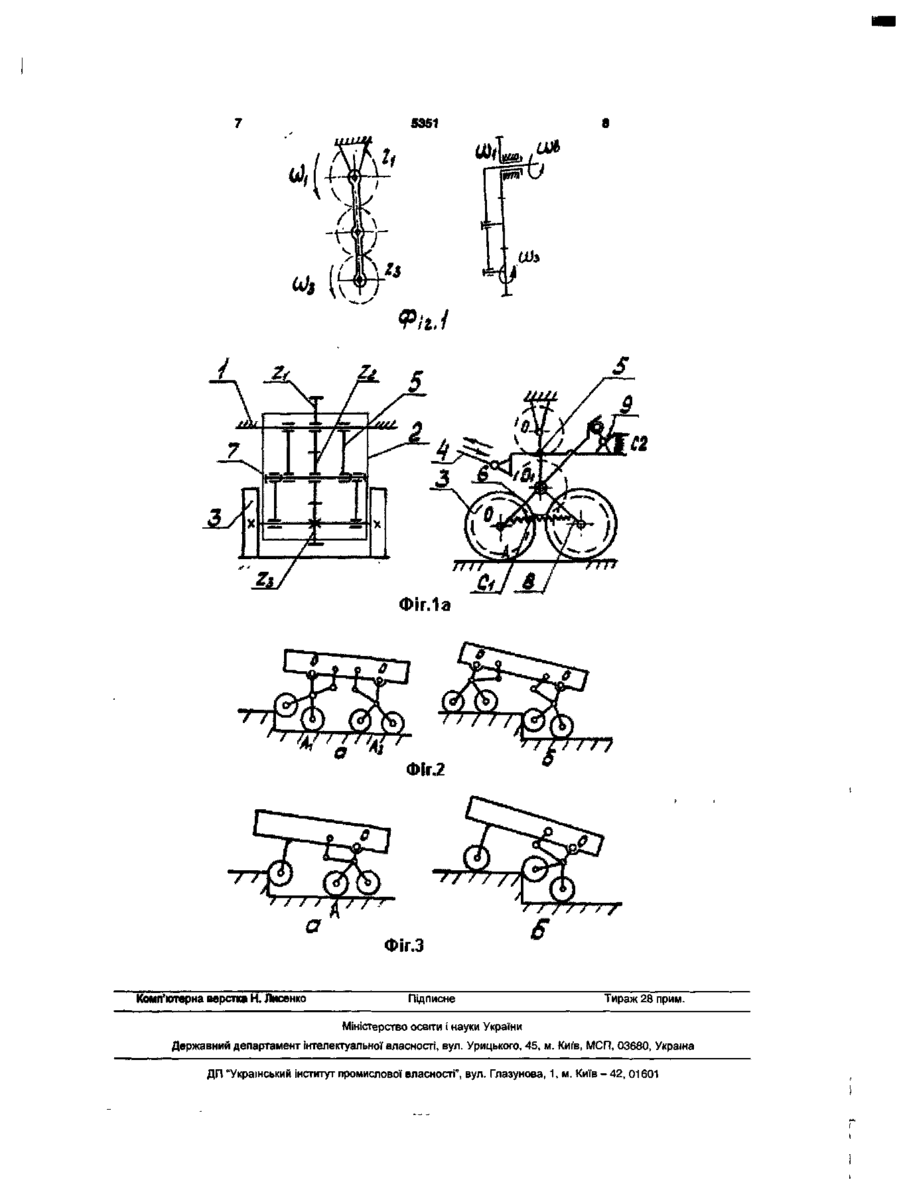
1. Спосіб безперервного пересування транспортного засобу з колісно-кроковим рушієм у колісно-кроковому режимі, що полягає у послідовному переміщенні коліс по опорній поверхні у фазі переносу у ведучому режимі, а потім у включенні крокового ходу коліс, який відрізняється тим, що для забезпечення стійкості колісно-крокового руху і здійснення активного і безперервного руху транспортного засобу у фазі переносу застосований рушій з колісно-кроковим важелем, кінематична схема розташованої на ньому зубчастої передачі приводу опорного колеса являє собою планетарну передачу із двома послідовно з'єднаними сателітами і забезпечує зростання швидкості обертання опорного колеса у фазі переносу, якщо передатне відношення зубців центрального колеса Z-| і периферійного сателіта Z 3 на осі опорного колеса (Z 3 /Z-j>1). 2. Спосіб за п.1, який відрізняється тим, що для забезпечення стійкості руху колісно-кроковий важіль має два опорних колеса, з'єднаних важе Корисна модель відноситься до способів пересування транспортних засобів високої прохідності і, зокрема, до транспортних засобів з колісно-кроковим рушієм. Відомий спосіб безперервного пересування транспортних засобів з колісно-кроковим рушієм у коліснокроковому режимі, що полягає в послідовному переміщенні коліс по опорній поверхні у фазі переносу у ведучому режимі, а потім включенні крокового ходу коліс. При цьому способі пересування у фазі переносу, якщо всі колеса здійснюють хід вперед, корпус транспортного засобу зупиняється до початку фази крокового руху. лем з віссю проміжного сателіта, причому положення цих важелів має бути визначеним відповідно до фаз колісно-крокового руху, так задній по ходу руху важіль у фазі переносу є опорним, а передній має можливість здійснювати вільний хід вперед відносно заднього, що дозволяє обом важелям незалежно установлюватися на дорожній поверхні будь-якої форми; у фазі крокового руху - кроковий хід здійснює передній важіль, який є опорним. 3. Спосіб за п.1, який відрізняється тим, що для підвищення рівномірності руху в коліснокроковому режимі відстань між передньою і задньою віссю транспортного засобу має дорівнювати пройденому шляху під час зміни фаз коліснокрокового руху. 4. Спосіб за п.1, який відрізняється тим, що на рушії з активною фазою переносу, який працює в колісному режимі роботи, встановлюють в залежності від дорожніх умов певне і зафіксоване положення його колісно-крокових важелів: у фазі крокування при роботі з підвищеною силою тяги, у фазі переносу в умовах бездоріжжя. ю со Для одержання стійкого і рівномірного руху зазначеним способом існують різни схеми роботи колісно-крокових важелів. Так, наприклад, коли колеса одного борта блоковані і роблять кроковий рух, то колеса іншого борта знаходяться у фазі переносу у ведучому режимі, або коли одне з коліс рухається вперед у ведучому режимі, то інші три рухаються в кроковому режимі в різних фазах крокування. Аналог винаходу: [Авторські свідоцтва СРСР №640897, МПК2: B62D57/02, 1979; №698830, МПК2: B62D57/02]. Недоліком цього способу пересування є те, що для забезпечення стійкості і рівномірності руху він застосований лише для спеціальних О) 5351 транспортних засобів високої прохідності, у трансмісії яких передбачений індивідуальний привод крокування на кожне з опорних коліс, число яких не менше чотирьох. Такий рушій через складність конструкції неможливо використати з доробкою трансмісії для існуючих транспортних засобів, що працюють в умовах бездоріжжя. Задача - визначити умови способу пересування транспортного засобу з одним коліснокроковим важелем, який забезпечує безперервний рух не тільки у фазі крокового руху, але і у фазі переносу. Такий колісно-кроковий важіль має бути конструктивно побудований таким чином, щоб під час ходу вперед відносно корпусу транспортного засобу (фаза переносу) компенсувалася зворотна дія - хід корпусу назад, що забезпечує безперервний колісно-кроковий рух. При ході важеля назад відбувається, як звичайно, фаза крокування. Таким вимогам вид повидає колісно-кроковий важіль з опорними приводними колесами, кінематична схема якого забезпечує у фазі переносу додаткову швидкість обертання опорних коліс. Розглянемо умови збереження сталості швидкості корпусу транспортного засобу з одним колісно-кроковим важелем з постийнообертовими опорними колесами у фазі переносу, тому що саме в цій фазі відбувається одночасно складний рух корпусу за допомогою приводних опорних коліс і рух важеля з опорними колесом вперед відносно корпусу.Сумарна лінійна швидкість вісі колеса і точки 0 2 важеля дорівнює: Vx=Vn+Vk (1) Де: Vn - швидкість руху колеса і точки О2 важеля, що забезпечує хід важеля відносно корпусу транспортного засобу (при умові, що ведуча шестірня приводу обертання опорних коліс на корпусі зупинена). VR - лінійна швидкість колеса і точки Ог важеля, яка дорівнює швидкості руху корпусу за умови, що важіль є нерухомий відносно корпусу. V n =W n xR k ; V k =W k xR k (2) Де: Rk - радіус колеса, W n і W k - кутові швидкості колеса відповідно лінійним Vn і Vk Підставивши (2) у рівняння (1) одержуємо: W x =W n +W k (3) Таким чином, кутова швидкість опорного колеса у фазі переносу з умови збереження сталості руху має збільшуватись. Для розв'язування поставленої задачи, а також з метою побудови діючої моделі такого типу рушія, розглянемо спосіб пересування транспортного засобу з колісно - кроковим рушієм. Важіль якого і розташована на ньому зубчаста передача опорних коліс являє собою планетарну передачу 3 двома послідовно з'єднаними сателітами (Фіг.1). Для визначення кутової швидкості колеса W n розглянемо схему колісно - крокового рушія (Фіг.1) при зафіксованому колесі Z-i, що відповідає типовій схемі планетарної передачі із зафіксованим колесом на вісі обертання водила (Фіг.З). Залежність кутових швидкостей між ланками такої передачі, яка має спільну вісь обертання визначається рівнянням: W1=U13xW3+W8x(1-U13) (4) W-i, W3, W8 - кутові швидкості зубчастих коліс Z-i, Z3 водила. Ui3=Z3/Zi - передатне відношення шестірень Zb Z3. W3=W8(1-Z1/Z3) (5) Якщо W^O; Якщо Zi=Z 3 , то кутова швидкість W 3 =0 Таким чином, маємо передачу з поступово рухаючимся сателітом. Якщо Тл>Тг, \ЛЛ>0 (Фіг.1). Відповідно до означень величин у рівняннях 1, 3: W n =W 3 , якщо Wi=0 Знак величини W3 залежить від напрямку повороту водила. Стосовно до параметрів моделі рушія водило здійснює кутовий поворот на 45° вперед по ходу руху корпусу рушія і назад. Підставивши початкові дані: We=0,5Wk; Zi/Z3=1,5, взяті конструктивно з моделі рушія, в рівнянні 5 маємо: \Л^=\Л/к+0,5х0,5\Л/к=1,25Wk Таким чином, у фазі переносу швидкість обертання опорних коліс моделі коліснокрокового рушія збільшується на 25%. Планетарна передача, параметри якої Zi>Z3, може бути застосована для побудови рушія з вищезгаданим колісно-кроковим важелем. Оскільки схема з одним опорним колесом колісно-крокового важеля не забезпечує стійкості руху, то побудова моделі рушія була виконана зі схемою (Фіг.1 а) (Важелі в крайніх положеннях зображені пунктирними лініями). Відповідно схемі Фіг. 1а колісно-кроковий важіль 2 складається з двох шарнірно з'єднаних важелів 6 і 8, зведених в упор один до одного за допомогою пружини С1, приводних опорних колес 3, приводу переміщення 4, який діє на важелі за допомогою приводної ланки 5. У фазі переносу під дією приводу 4 і приводної ланки 5, важелі 6, 8 пересуваються вперед разом із своїми опорними приводними колесами і в момент, коли здійснюється контакт з упорами7, 9,повертаються навколо точки О, що є віссю 1 корпусу, на якій шарнірно установлені складові частини 5, 6, 8 колісно-крокового рушія. При цьому задній важіль 8 (із двох важелів 6 і 8, які були обидва опорними на початку фази переносу) стає опорним. Передній, по ходу руху, важіль 6, який в цей час не є опорним, може за рахунок наявності вільного руху відносно заднього опорного важеля і його приводного колеса в'їжджати на поверхню дорожньої перешкоди. Опорні колеса 3 важелів 6, 8 мають привод обертання за допомогою шестірень постійного зчеплення Zi, Z2, Z3. Приводна шестірня Zi знаходиться на корпусі транспортного засобу, а шестірні 2.г, 2.г - на шарнірних висях важелів коліснокрокового рушія. При цьому, при ході вперед, коли ланка 5 під дією приводу 4 повертається навколо точки О, шестірня Z2 обертаючись навколо шестірні Zi одержує додаткову швидкість 5 5351 обертання, яка передається через шестірні Z3 на опорні колеса Таким чином, при ході рушія вперед відносно корпусу, опорні колеса здобувають додаткове обертання, що забезпечує стійкий, безперервний рух корпусу транспортного засобу у фазі переносу Повний хід колісно-крокового важеля складається з ходу важелів 6, 8 на відстані від упору 9 при ході вперед до положення максимального натягу пружини С2 при ході назад, що приводить до підйому точки Оі і відриву опорного колеса важеля 8 від опорної поверхні При цьому колеса обох важелів є опорними В положеннях, коли упор 9 має контакт з ланкою5, важелі блокуються і рухаються далі до кінця ходу, як єдиний складений важіль Якщо, наприклад, важіль 6 досягає упору 9, блокується з ланкою 5, то далі важелі рухаються з поворотом навколо точки О Взаємодія важеля 6 з упором 7 має місце, якщо важіль підіймається вверх при в'їзді на поверхню дорожньої перешкоди значної височини На випадок, коли рух корпусу вперед неможливий завдяки пороговій дорожній перешкоді, то колісно-кроковий рушій, встановлений на задній ВІСІ транспортного засобу, діє у фазі крокового руху як складений важіль ОА (Фіг 1а), а корпус повертається відносно точки О важеля разом з підйомом передніх коліс вгору Продовження в'їзду на поверхню перешкоди відбувається за допомогою опорних приводних коліс Розглянемо схеми переїзду дорожніх перешкод в колісно-кроковому режим» коліснокроковим рушієм (Фіг 1а), встановленим на транспортний засіб за різними монтажними варіантами його розташування І варіант Спосіб переїзду дорожньої перешкоди транспортним засобом з вище згаданим рушієм в колісно-кроковому режимі, який встановлений замість передньої і задньої пари колес Схема переїзду дорожньої перешкоди передніми і задніми колесами цього рушія показана на Фіг 2а, 26 ВІДПОВІДНО Висновок В'їзд на поверхню дорожньої перешкоди значної височини передніми або задніми колесами рушія має починатися з фази переносу Таким чином, кривошип приводу переміщення 4 має здійснювати дискретний рух, фіксований у положенні фаз переносу і крокування, але безперервний рух кривошипу є також можливий при певній ПОСЛІДОВНОСТІ фаз роботи рушія Для безперервного руху необхідно, щоб відстань між передньою і задньою віссю транспортного засобу була такою, щоб після в'їзду на поверхню перешкоди передніми колесами (який триває від початку фази переносу до фази крокового руху), одразу ж починався би в'їзд задніми колесами у фазі переносу L M i=W s xR k xT (6) Де (_ААІ - відстань між передньою та задньою віссю транспортного засобу, W L - Кутова швидкість обертання опорних коліс у фазі переносу, Rk - радіус опорного колеса, Т - період часу від початку фази переносу до фази крокового руху II варіант спосіб переїзду дорожньої перешкоди транспортним засобом з цим же рушієм у колісно-кроковому режимі, який установлений замість задньої пари коліс (при цьому передні колеса є неприводними) Схема переїзду дорожньої перешкоди передніми колесами показана на Фіг За, а задніми колесами - колесами рушія - на Фіг 36 При цьому умови, що приведени в рівняннях 1, 6 також мають місце При роботі у колісному режимі кривошип приводу переміщення 4 має бути зафіксований у положенні ВІДПОВІДНО або фазі крокового руху, або фазі переносу При цьому, якщо зафіксовано положення ВІДПОВІДНО фазі крокового руху, то важіль 6 має можливість здійснювати хід вперед, деформуючи пружину Сг Таким чином, при роботі з підвищеною силою тяги важіль 6 завдяки ди приводу обертання його опорного колеса здійснює хід вперед, а приводне колесо важеля 8 поступово стає на опорну поверхню, сприймаючи силу тяги, що покращує умови зчеплення приводних коліс важелів 6, 8,з дорогою Таким чином, застосування рушія з активною фазою переносу у колісно - кроковому режимі має бути корисним для транспортних засобів, що працюють в умовах бездоріжжя Якщо рушій працює у колісному режимі роботи, то кривошип зафіксований у положенні ВІДПОВІДНО фазі переносу, то маємо режим підвищеної прохідності, а у фазі крокового руху - режим з підвищеною силою тяги Приклад конкретного виконання З метою перевірки поставленої задачі - удосконалення рушія, який має здійснювати активний рух транспортного засобу в фазі переносу було зроблено діючий макет за схемою Фіг 1 і монтажним варіантом Фіг 3 При цьому опорні колеса переднього и заднього важелів 6 і 8 були подвоєними, а між ними знаходилась шестірня Z3 Передаточне число шестірень Z-i/Z2=1, Z3/Z3=1,5 Колеса переднього важеля 6 заходять проміж колес важеля 8 на відстань, яка дорівнює половині радіуса колеса Всі опорні колеса мають діаметр 60мм Відстань між переднім неприводним колесом і опорним колесом важеля 6 дорівнює 140мм Було здійснено в'їзд передніми і задніми колесами макету на поверхню дорожньої перешкоди височиною 35мм у колісно-кроковому режимі з безперервним обертанням кривошипу привода переміщення В'їзд на поверхню перешкоди передніми колесами макету здійснювався з затримкою руху під час підйому передньої частини корпусу вверх у фазі крокового руху В'їзд на поверхню перешкоди задніми колесами - опорними колесами важелів рушія - починався у фазі переносу і був, практично, безперервним 5351 г =п Фіг.іа Фіг.2 //7 Фіг.3 Комп'ютерна верстка Н. Лисенко Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул. Глазунова, 1, м. Київ - 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of continuous displacement of vehicle with wheel-walking mover in wheel-walking mode
Автори англійськоюShtompel Mykola Mykolaiovych
Назва патенту російськоюСпособ непрерывного передвижения транспортного средства с колесно-шаговым движителем в колесно-шаговом режиме
Автори російськоюШтомпель Николай Николаевич
МПК / Мітки
МПК: B62D 57/00
Мітки: режимі, колісно-кроковим, засобу, рушієм, безперервного, спосіб, колісно-кроковому, транспортного, пересування
Код посилання
<a href="https://ua.patents.su/4-5351-sposib-bezperervnogo-peresuvannya-transportnogo-zasobu-z-kolisno-krokovim-rushiehm-u-kolisno-krokovomu-rezhimi.html" target="_blank" rel="follow" title="База патентів України">Спосіб безперервного пересування транспортного засобу з колісно-кроковим рушієм у колісно-кроковому режимі</a>
Спосіб пересування транспортного засобу та двигун для його здійснення
Номер патенту: 51692
Опубліковано: 16.12.2002
Автор: Дешко Ігор Віталійович
МПК: F03G 3/00
Мітки: спосіб, транспортного, засобу, здійснення, пересування, двигун
Формула / Реферат:
1. Спосіб пересування транспортного засобу, що полягає у перетворюванні впливу інерційних мас в односпрямоване пересування транспортного засобу шляхом взаємодії інерційних мас, які рухаються, з інерційними елементами, що встановлені на корпусі, який відрізняється тим, що інерційні маси переміщують примусово в системі відліку обертових інерційних елементів.2. Двигун для пересування транспортного засобу, який містить корпус, зв'язаний з...
Підвіска колеса транспортного засобу
Номер патенту: 38986
Опубліковано: 15.01.2004
Автори: Марчук Микола Михайлович, Ніколайчук Валерій Васильович, Ніколайчук Василь Михайлович
МПК: B60G 11/32
Мітки: підвіска, транспортного, колеса, засобу
Формула / Реферат:
1. Підвіска колеса транспортного засобу, що містить жорстко з'єднаний з віссю колеса важіль, що закріплений кінцями через торсіонний пружний елемент і пружину розтягу на рамі транспортного засобу, пружину стиску, шарнірно закріплену верхнім кінцем на рамі транспортного засобу, а нижнім кінцем через вушко - на середній частині важеля, яка відрізняється тим, що торсіонний пружний елемент являє собою торсіон, одним кінцем приєднаний за...
Спосіб визначення положення центра ваги колісного транспортного засобу і пристрій для його здійснення
Номер патенту: 69620
Опубліковано: 15.09.2004
Автори: Плешкановський Олег Валентинович, Денис Василь Володимирович, Козлинський Мирослав Петрович, Мальнов Сергій Іванович
МПК: B60C 23/00
Мітки: положення, центра, визначення, здійснення, пристрій, колісного, спосіб, транспортного, ваги, засобу
Формула / Реферат:
1. Спосіб визначення положення центра ваги колісного транспортного засобу, що включає визначення тиску повітря в шинах, його порівняння з розрахунковим, який відрізняється тим, що визначають тиск повітря в кожній шині коліс, визначають величини вертикальних навантажень на кожне із коліс, за якими визначають положення центра ваги колісного транспортного засобу в горизонтальній площині.2. Пристрій для визначення положення центра ваги...
Пристрій для змащування гребенів коліс рейкового транспортного засобу
Номер патенту: 67221
Опубліковано: 15.06.2004
Автори: Голубенко Олександр Леонідович, Осенін Юрій Іванович, Марченко Дмитро Миколайович, Мушкаєв Ярослав Володимирович
МПК: B61K 3/00
Мітки: транспортного, гребенів, рейкового, пристрій, засобу, змащування, коліс
Формула / Реферат:
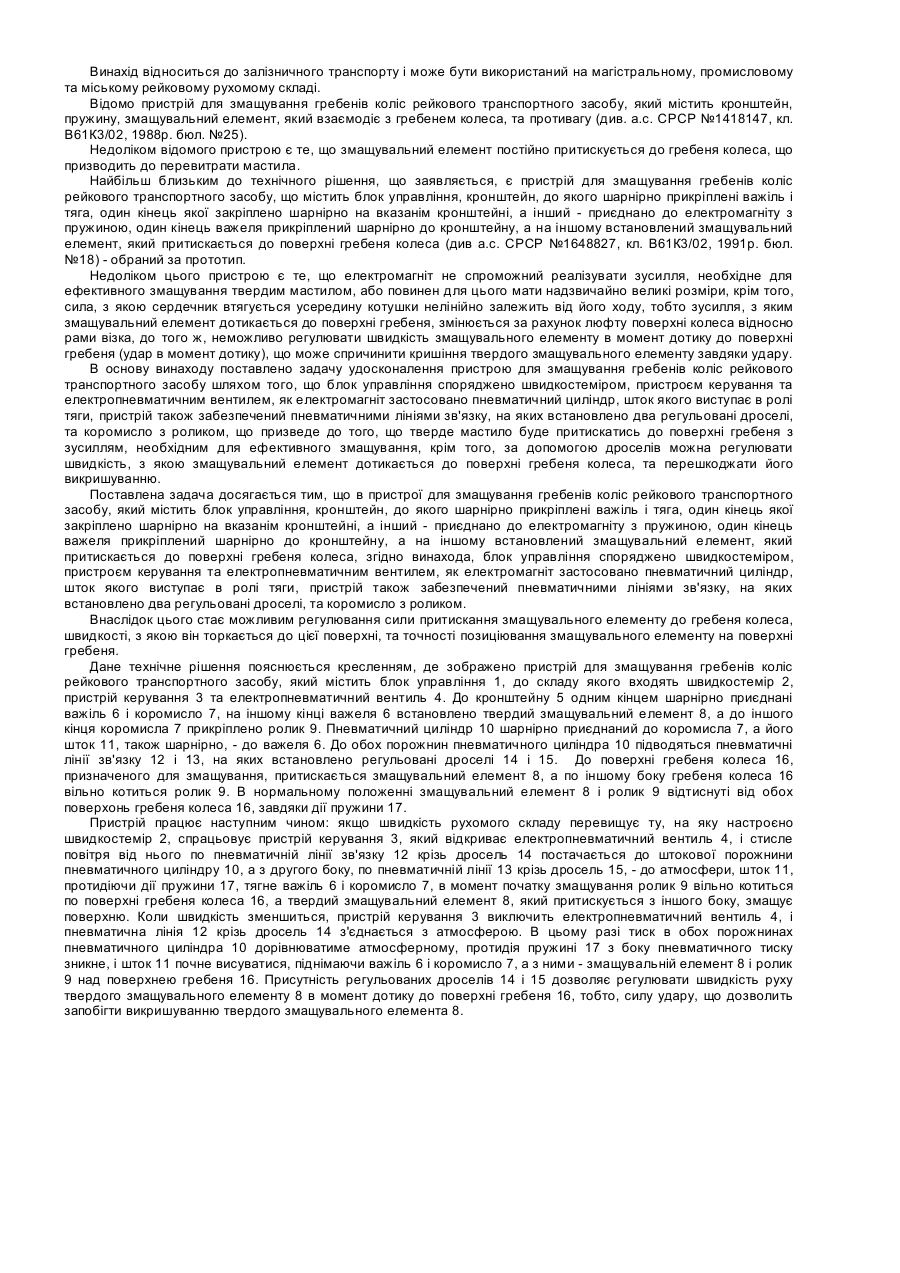
Пристрій для змащування гребенів коліс рейкового транспортного засобу, що містить блок управління, кронштейн, до якого шарнірно прикріплені важіль і тяга, один кінець якої закріплено шарнірно на вказанім кронштейні, а інший - приєднано до електромагніта з пружиною, один кінець важеля прикріплений шарнірно до кронштейна, а на іншому встановлений змащувальний елемент, який притискається до поверхні гребеня колеса, який відрізняється тим, що...
Пристрій для змащування гребенів коліс рейкового транспортного засобу
Номер патенту: 67231
Опубліковано: 15.06.2004
Автори: Мушкаєв Ярослав Володимирович, Голубенко Олександр Леонідович, Осенін Юрій Іванович, Марченко Дмитро Миколайович
МПК: B61K 3/00
Мітки: змащування, засобу, пристрій, гребенів, транспортного, коліс, рейкового
Формула / Реферат:
Пристрій для змащування гребенів коліс рейкового транспортного засобу, що містить блок управління, кронштейн, до якого шарнірно прикріплені важіль і тяга, один кінець якої закріплено шарнірно на вказанім кронштейні, а інший приєднано до електромагніта з пружиною, один кінець важеля прикріплений шарнірно до кронштейна, а на іншому встановлений змащувальний елемент, який притискається до поверхні гребеня колеса, який відрізняється тим, що блок...
Попередній патент: Спосіб прогнозування захворювань пародонта у хворих із поєднаними лицьовою і легкою черепно-мозковою травмами
Наступний патент: Пружна муфта інженера скуби і.с.
Випадковий патент: Прищеплений олефіновий полімер у вигляді частинок, що використовується як агент суміщення, і спосіб його одержання