Радіолокаційний пристрій для визначення дальності та швидкості цілі
Номер патенту: 3925
Опубліковано: 27.12.1994
Автори: Гладиш Фелікс Леонідович, Шермаревич Владлен Георгієвич, Кравцов Володимир Геннадєвич, Гегечкорі Сергій Олексійович, Невгасимий Олександр Федорович
Формула / Реферат
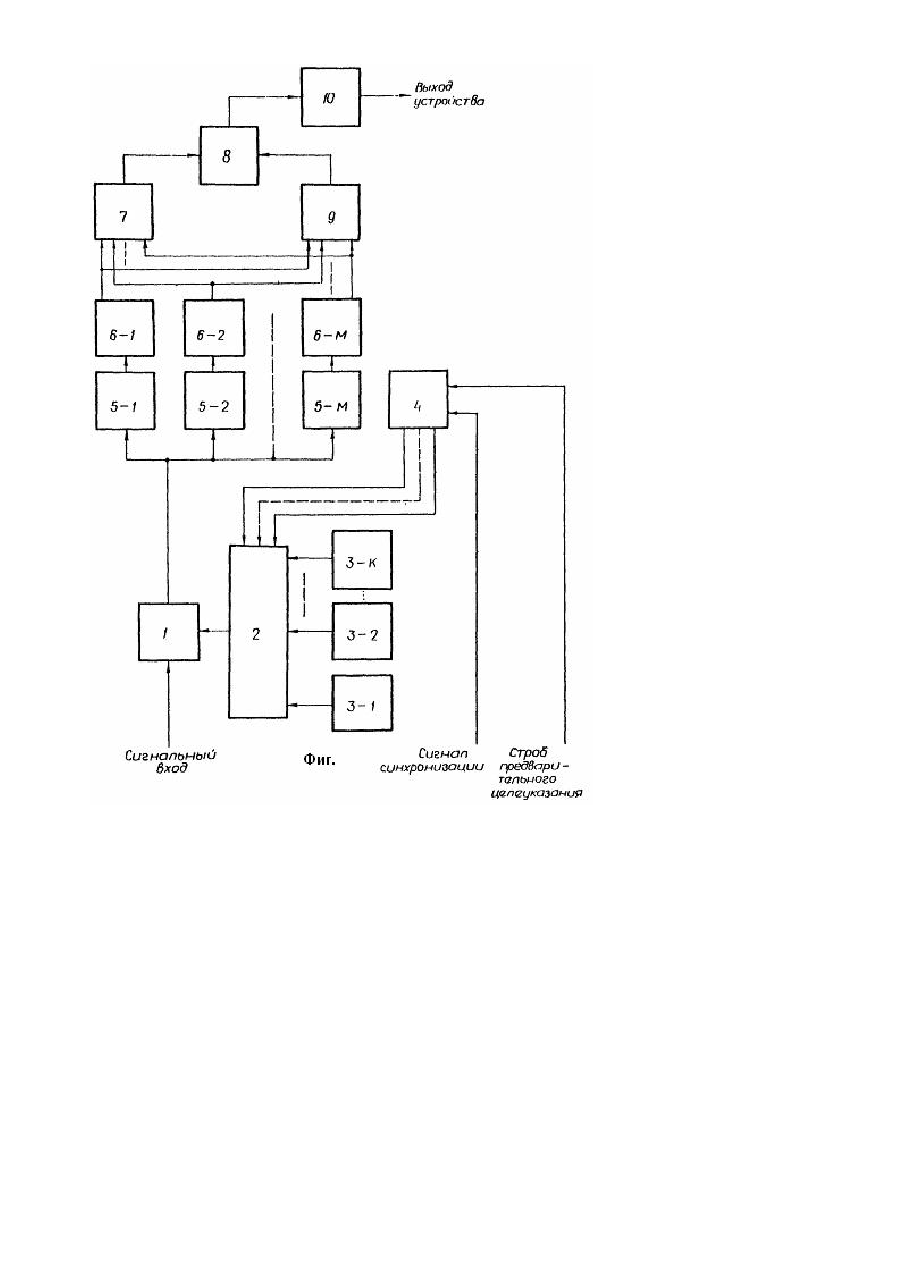
Радиолокационное устройство для определения дальности и скорости цели, содержащее смеситель, первый выход которого является сигнальным входом устройства, вычислитель дальности и скорости цели, выход которого является выходом устройства, отличающееся тем, что введены К гетеродинов, где К= 2, 3,....коммутатор. К сигнальных входов которого соединены с выходами К гетеродинов соответственно, а выход коммутатора подключен к второму входу смесителя, дешифратор, первый вход которого является входом строба предварительного целеуказания, второй вход - входом сигнала синхронизации, а К выходов соединены с управляющими входами коммутатора соответственно, последовательно включенные М-входовой взвешивающий сумматор, где М=2, 3..., и функциональный делитель, выход которого соединен с входом вычислителя дальности и скорости, М-входовой сумматор, выход которого подключен к второму входу функционального делителя, Μ звеньев, каждое из которых состоит из последовательно соединенных полосового усилителя и амплитудного детектора, входы полосовых усилителей всех звеньев подключены к выходу смесителя, выходы амплитудных детекторов всех звеньев соединены с входами М-входового взвешивающего сумматора и М-входового сумматора соответственно.
Текст
Изобретение относится к области радиолокации и может быть использовано для создания радиолокационных (РЛ) устройств, работающи х в составе систем, предназначенных для сопровождения высокоподвижных целей. Известны РЛ устройства, использующие в качестве зондирующего сигнала симметричный линейночастотный модулированный (СЛЧМ) сигнал [1]. В данных РЛ устройства х обработка отраженного от цели сигнала для измерения дальности и скорости цели производится путем частотного сравнения прямого и отраженного СЛЧМ сигналов с последующим анализом диапазона частот биений. При этом для обеспечения однозначного определения дальности и скорости при выполнении требований по энергетике (обеспечение необходимого состояния соотношения сигнал/шум) проводится разбиение полученного диапазона частот биений на N частотных каналов. При работе такого РЛ устройства с использованием данных строба предварительного целеуказания производится последовательное или параллельное измерение в части частотных каналов, например, с помощью частотомера частот биений, пропорциональных дальности и скорости цели. Известно, что для диапазона дальностей порядка десяти километров значение диапазона частот биений составляет десятки мГц. Таким образом, с учетом значений полос пропускания частотных каналов, определяемых, с одной стороны, допустимыми аппаратурными затратами и, с другой стороны, реализуемыми значениями добротностей резонансных контуров, допустимое значение разрешения двух целей составит не менее нескольких сот метров, что ухудшает процесс сопровождения и в некоторых случаях может привести к его срыву. Кроме того, данные РЛ устройства являются нетехнологичными с точки зрения допустимых величин массогабаритных характеристик, а также большого объема настроечно-регулировочных работ в процессе изготовления и эксплуатации, так как требуют в диапазоне частот биений реализации сотен частотных каналов и такого же количества измерителей частоты. Известно РЛ устройство со следящим приемом [2], в котором анализ частот биений осуществляется либо перестройкой следящего фильтра в пределах диапазона частот биений, либо сверткой диапазона частот биений в пределах полосы одного фильтра с помощью следящего гетеродина. Это устройство выбрано в качестве прототипа. Оно содержит смеситель, первый вход которого является сигнальным входом устройства, следя щий гетеродин, усилитель промежуточной частоты (УПЧ), вычислитель дальности и скорости цели, выход которого является выходом устройства, управитель частоты и схему частотной автоподстройки (ЧАП). На вход смесителя поступают сигналы диапазона частот биений. На управитель частоты поступает строб предварительного целеуказания, в соответствии со значением которого управитель частоты производится начальную установку частоты следящего гетеродина и осуществляет перестройку частоты в пределах части диапазона частот биений, определяемой суммарной погрешностью измерения дальности и скорости строба предварительного целеуказания. При попадании преобразованной частоты биений, пропорциональной дальности и скорости цели, в полосу пропускания УПЧ, происходит захват и слежение схемы ЧАП за частотой биений. При этом подстройка следящего гетеродина производится с помощью управителя частоты, на вход которого поступает сигнал рассогласования с выхода схемы ЧАП. В вычислителе дальности и скорости цели производится пересчет амплитудных и частотны х данных параметров дальности и скорости в соответствующую размерность значений дальности - метры, и скорости - метры в секунду. Темп выдачи данных о дальности и скорости цели такого РЛ устройства определяется временем перестройки следящего гетеродина, постоянной времени узкополосного УПЧ и постоянной времени схемы ЧАП, что в сумме составит не меньше нескольких сот миллисекунд, что не дает возможности сопровождать высокоподвижные цели. Разрешающая способность РЛ устройства со следящим гетеродином будет определяться суммарной погрешностью определения дальности и скорости цели строба предварительного целеуказания, которая с учетом реально достижимых значений точности определения дальности и скорости цели - несколько десятков метров и порядка 100 м/с, соответственно дает значение разрешающей способности порядка 500...1000 м. Задачей изобретения является такое усовершенствование радиолокационного устройства для определения дальности и скорости цели, которое позволило бы отказаться от инерционной схемы частотной автоподстройки, не требует дополнительной подстройки следящего гетеродина и позволило бы расширить полосу пропускания преобразованных частот, что соответственно обеспечило бы повышение темпа выдачи данных о дальности и скорости цели и повышение разрешающей способности РЛ устройства. Задача решается тем, что в радиолокационное устройство для определения дальности и скорости цели, содержащее смеситель, первый вход которого является сигнальным входом устройства, вычислитель дальности и скорости цели, выход которого является выходом устройства, введены К гетеродинов, где К=2, 3,..., коммутатор, К сигнальных входов которого соединены с выходами К гетеродинов соответственно, а выход коммутатора подключен к второму входу смесителя, дешифратор, первый вход которого является входом строба предварительного целеуказания, второй вход - входом сигнала синхронизации, а К выходов соединены с управляющими входами коммутаторами соответственно, последовательно включенные М-входовой взвешивающий сумматор, где М=2,3,..., и функциональный делитель, выход которого соединен со входом вычислителя дальности и скорости, М-входовой сумматор, выход которого подключен к второму входу функционального делителя, Μ звеньев, каждое из которых состоит из последовательно соединенных полосового усилителя и амплитудного детектора, входы полосовых усилителей всех звеньев подключены к выходу смесителя, выходы амплитудных детекторов всех звеньев соединены со входами Μ - входового взвешивающего сумматора и Μ - входового сумматора соответственно. Разрешающая способность РЛ устройства определяется полосой пропускания одного полосового усилителя из состава М-звеньев, что с учетом значений этой полости - несколько десятков кГц, дает значение разрешения несколько десятков метров, т.е. разрешающая способность заявленного объекта в несколько раз выше, чем в прототипе. Повышение темпа выдачи данных о дальности и скорости цели достигается за счета исключения ЧАП, которая имеет большую постоянную времени, а измерение преобразованных частот биений производят в суммарной полосе частот Μ звеньев без дополнительной подстройки частоты следящего гетеродина. Таким образом, темп выдачи данных о дальности и скорости цели на порядок выше, чем в прототипе. На чертеже представлена схема функциональная РЛ устройства. Устройство содержит смеситель 1, первый вход которого является сигнальным входом устройства, коммутатор 2, К сигнальных входов которого соединены с выходами К гетеродинов 3, выход коммутатора 2 подключен к второму входу смесителя 1, дешифратор 4, первый вход которого является входом строба предварительного целеуказания, второй вход - входом сигнала синхронизации, а К выходов соединены с управляющими входами коммутатора 2 соответственно, Μ звеньев, каждое из которых состоит из последовательно соединенных полосового усилителя 5 и амплитудного детектора 6, входы полосовых усилителей 5 все х звеньев подключены к выходу смесителя 1, последовательно включенные Μ - входовой сумматор 7, где Μ = 2, 3,..., и функциональный делитель 8, Μ - входовой сумматор 9, выход которого подключен к второму входу функционального делителя 8, выходы амплитудных детекторов 6 всех звеньев соединены со входами М-входового взвешивающего сумматора 7 и, М-входового сумматора 9 соответственно, вычислитель дальности и скорости цели 10, вход которого соединен с выходом функционального делителя 8, а выход вычислителя 10 дальности и скорости цели является выходом РЛ устройства. РЛ устройство работает следующим образом. На сигнальный вход смесителя 1 поступают сигналы диапазона частот биений. В смесителе 1 они смешиваются с сигналом одного из К гетеродинов 3 таким образом, что на выходе смесителя 1 преобразованные сигналы диапазона частот биений попадают в полосу частот полосовых усилителей 5. Подключение необходимого гетеродина осуществляется с помощью коммутатора 2 по командам дешифратора 4 в зависимости от данных строба предварительного целеуказания с учетом того, что на восходящем и нисходящем полупериодах частотной, модуляции частоты биений, пропорциональные скорости цели, в первом случае суммируются, а во втором - вычитаются. Для синхронизации работы дешифратора 4 с началом излучения СЛЧМ сигнала передатчиком и учета полупериода частотной модуляции используется сигнал синхронизации, следующий с частотой, равной удвоенной частоте модуляции зондирующего СЛЧМ сигнала. Количество дискретных гетеродинных частот (количество гетеродинов) определяется, с одной стороны, значениями частот биений, а с другой стороны, суммарной погрешностью определения дальности и скорости цели строба предварительного целеуказания. Преобразованные сигналы диапазона частот биений с выхода смесителя 1 выделяются набором из Μ звеньев, каждое из которых состоит из последовательно соединенных полосового усилителя 5 и амплитудного детектора 6. При этом, полосы пропускания полосовых усилителей из состава Μ звеньев пересекаются на определенном уровне (так соседние пересекаются, например, на уровне 3 дБ), их амплитудно-частотные характеристики (АЧХ) идентичны, а полоса пропускания одного полосового усилителя определяется необходимым значением точности определения частот биений, пропорциональных дальности и скорости цели (точность составляет не менее 1/10 ширины полосы пропускания одного частотного звена, если соотношение сигнал/шум больше или равно 20). Таким образом, разнос между любыми двумя последовательными частотами К гетеродинов 3, а также суммарная полоса Μ определяются суммарной погрешностью определения дальности и скорости строба предварительного целеуказания. С учетом заданных значений этой погрешности величина суммарной полосы пропускания Μ звеньев составит несколько сот кГц. При Μ = 5 полоса пропускания одного полосового усилителя из состава Μ звеньев составит несколько десятков кГц. Сигналы с выходом Μ звеньев поступают на вход Μ - входового взвешивающего сумматора 7 и М-входового сумматора 9, где происходит суммирование амплитуд сигналов частот биений с коэффициентами, определяемыми номерами Μ звеньев, и производится просто суммирование амплитуд сигналов частот биений соответственно. В функциональном делителе 8 производится деление первой суммы на вторую. Результат делений представляет собой математическое ожидание дискретного распределения вероятностей измеряемых частот биений Μ звеньев, оптимальной оценкой которого является сумма вида: M f= åf m × bm m =1 где f - оцениваемая частота биений; fm - номер звена (весовой коэффициент); am bm = - дискретное распределение вероятностей; M åa m K =1 am - амплитуда сигнала частот биений в звене; M åa k - сумма амплитуд сигналов частот биений в Μ звеньях. K =1 Таким образом на выходе функционального делителя 8 получаем значение преобразованной суммы или разности (в зависимости от полуволны частотной модуляции) частот биений, пропорциональных скорости цели. Затем этот преобразованный сигнал поступает в вычислитель 10 дальности и скорости, где производится пересчет амплитудных и частотных данных параметров дальности и скорости в соответствующую размерность значений дальности - метры, и скорости - метры в секунду.
ДивитисяДодаткова інформація
Назва патенту англійськоюRadar device for determination of range and velocity of target
Автори англійськоюHladysh Felix\ks Leonidovych, Hehechkori Serhii Oleksiiovych, Kravtsov Volodymyr Hennadiiovych, Shermarevych Vladlen Heorhiiovych
Назва патенту російськоюРадиолокационное устройство для определения дальности и скорости цели
Автори російськоюГладиш Феликс Леонидович, Гегечкори Сергей Алексеевич, Кравцов Владимир Геннадиевич, Шермаревич Владлен Георгиевич
МПК / Мітки
МПК: G01S 13/00
Мітки: дальності, цілі, швидкості, визначення, радіолокаційний, пристрій
Код посилання
<a href="https://ua.patents.su/3-3925-radiolokacijjnijj-pristrijj-dlya-viznachennya-dalnosti-ta-shvidkosti-cili.html" target="_blank" rel="follow" title="База патентів України">Радіолокаційний пристрій для визначення дальності та швидкості цілі</a>
Спосіб визначення дальності
Номер патенту: 3056
Опубліковано: 26.12.1994
Автори: Глазков Леонід Олександрович, Скрипник Юрій Олексійович, Квашньов Юрій Олександрович
МПК: G01S 13/12
Мітки: спосіб, визначення, дальності
Формула / Реферат:
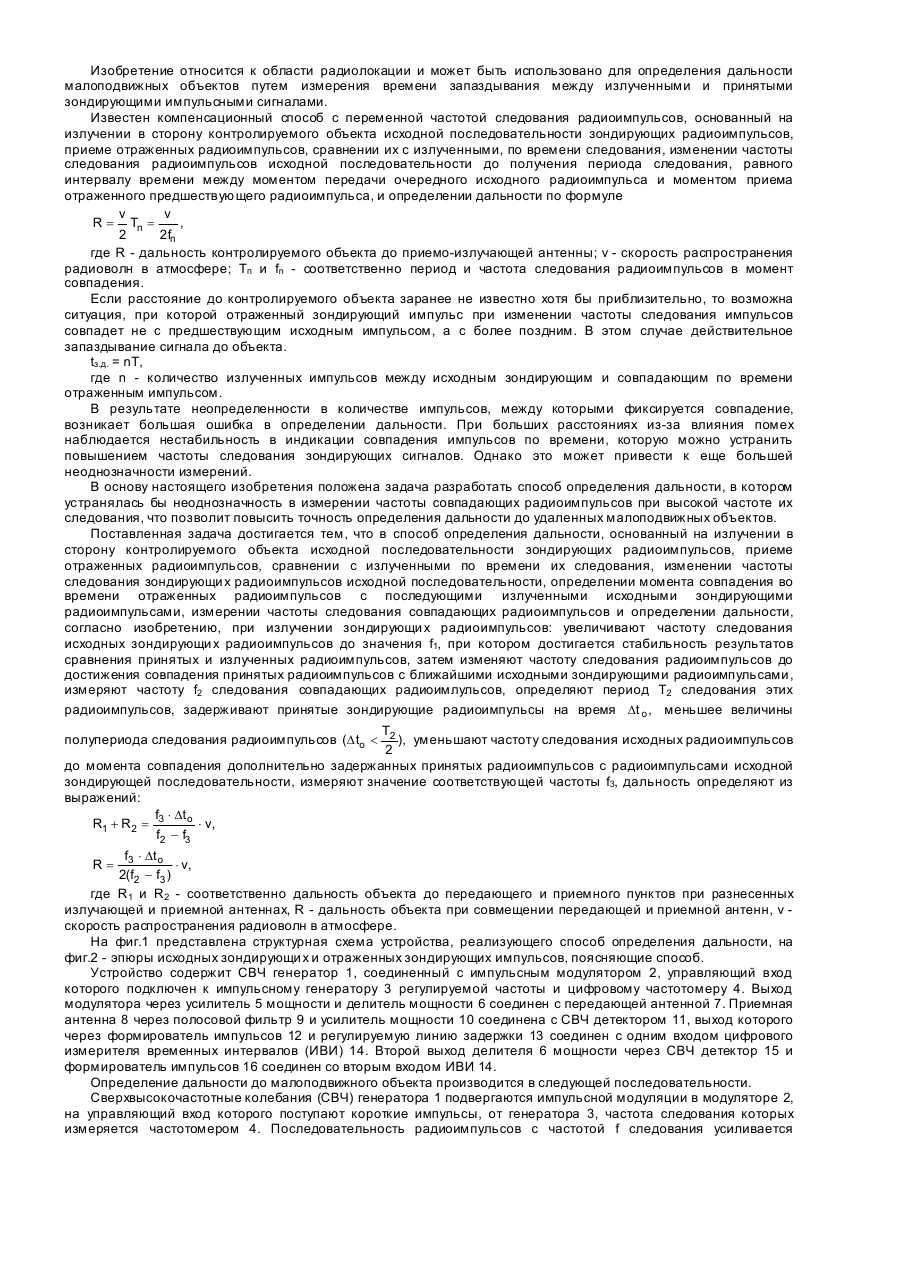
Способ определения дальности, основанный на излучении в сторону контролируемого объекта исходной последовательности зондирующих радиоимпульсов, приеме отраженных радиоимпульсов, сравнении с излученными по времени их следования, изменении частоты следования зондирующих радиоимпульсов исходной последовательности, определении момента совпадения во времени отраженных радиоимпульсов с последующими излученными исходными зондирующими...
Пристрій для вимірювання швидкості переміщення
Номер патенту: 2063
Опубліковано: 20.12.1994
Автор: Ярославцев Михайло Іванович
МПК: G01P 3/42
Мітки: переміщення, вимірювання, швидкості, пристрій
Формула / Реферат:
1. Устройство для измерения скорости перемещения, содержащее генератор эталонной частоты, делитель частоты и последовательно соединительные блок питания, фазовращатель, компаратор, многоканальный распределитель импульсов, многоканальный формирователь опорных импульсов, многовходовую логическую схему и блок осреднения, выход генератора эталонной частоты соединен с дополнительным входом многоканального формирователя опорных импульсов,...
Сигналізатор граничної швидкості обертання валу
Номер патенту: 1333
Опубліковано: 25.03.1994
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: G01P 3/42
Мітки: швидкості, обертання, валу, граничної, сигналізатор
Формула / Реферат:
Сигнализатор предельной скорости вращения вала, содержащий первый формирователь импульсов, сигнализатор, коммутатор, переключатель, генератор тактовых импульсов, программный блок, первый и второй счетчики импульсов, формирователь запрещающего сигнала, второй формирователь, первый триггер, второй триггер и первый и второй элементы И, причем вход первого формирователя импульсов соединен с входом устройства, а выход — с входом сигнализатора...
Перетворювач швидкості переміщення в код
Номер патенту: 3223
Опубліковано: 26.12.1994
Автори: Данілов Ніколай Алєксєєвіч, Брезе Євген Юрійович
МПК: H03M 1/50
Мітки: переміщення, перетворювач, швидкості, код
Формула / Реферат:
Преобразователь скорости перемещения в код, содержащий последовательно соединенные генератор импульсов, блок питания, фазовращатель, кинематический вход которого является входом преобразователя, и формировать фазовых импульсов, синхронизатор, первый вход которого соединен с выходом генератора импульсов, и счетчик, отличающийся тем, что в него введены регистр, формирователь прерываний и вычислитель, причем выход генератора импульсов соединен...
Пристрій для автоматичного визначення часу фільтрування
Номер патенту: 101
Опубліковано: 30.04.1993
Автор: Воробйов Євгеній Ігоревич
МПК: B01D 37/00
Мітки: пристрій, фільтрування, визначення, автоматичного, часу
Формула / Реферат:
Ф о р м у л а и з о б р е т е н и я Устройство для автоматического определения времени фильтрования, содержащее расходомер, установленный на выходном продуктопроводе, интегратор, вход которого связан с выходом расходомера, сумматор, выход которого соединен через нулевое реле с запорным органом на входе фильтра, и блок умножения, первый вход которого связан с выходом блока нелинейности, а выход — с первым входом сумматора, второй вход...
Попередній патент: Спосіб термострумового тренування інтегральної схеми
Наступний патент: Пристрій для стерилизації води
Випадковий патент: Спосіб відновлення втраченої коронки зуба у собак