Захоплювач вантажника
Номер патенту: 16160
Опубліковано: 29.08.1997
Автори: Козлинський Мирослав Петрович, Паньків Анатолій Теофілович
Формула / Реферат
Захват погрузчика, содержащий смонтированную на последнем с возможностью вертикального и горизонтального перемещений каретку с вилами и привод се горизонтального перемещения, включающий в себя силовой цилиндр, распределитель с золотником и датчик отклонения центра масс груза от продольной плоскости симметрии погрузчика, выполненный в виде по меньшей мере одного дополнительного силового цилиндра, рабочая полость которого сообщена с указанным золотником. а корпус соединен с погрузчиком, отличающийся тем, что, с целью повышения надежности, шток дополнительного цилиндра соединен с кареткой, а последняя установлена шарнирно с возможностью поворота в вертикальной поперечной плоскости.
Текст
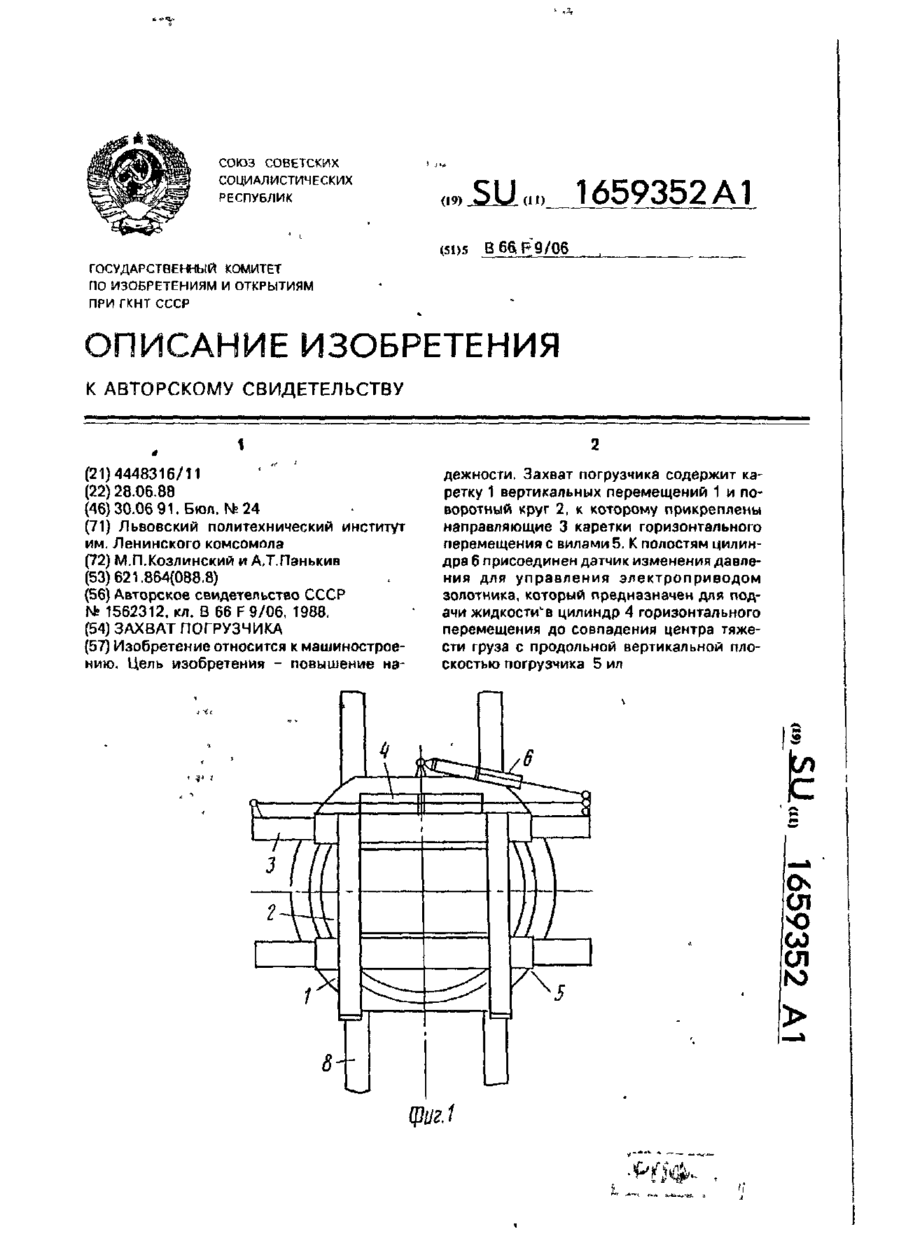
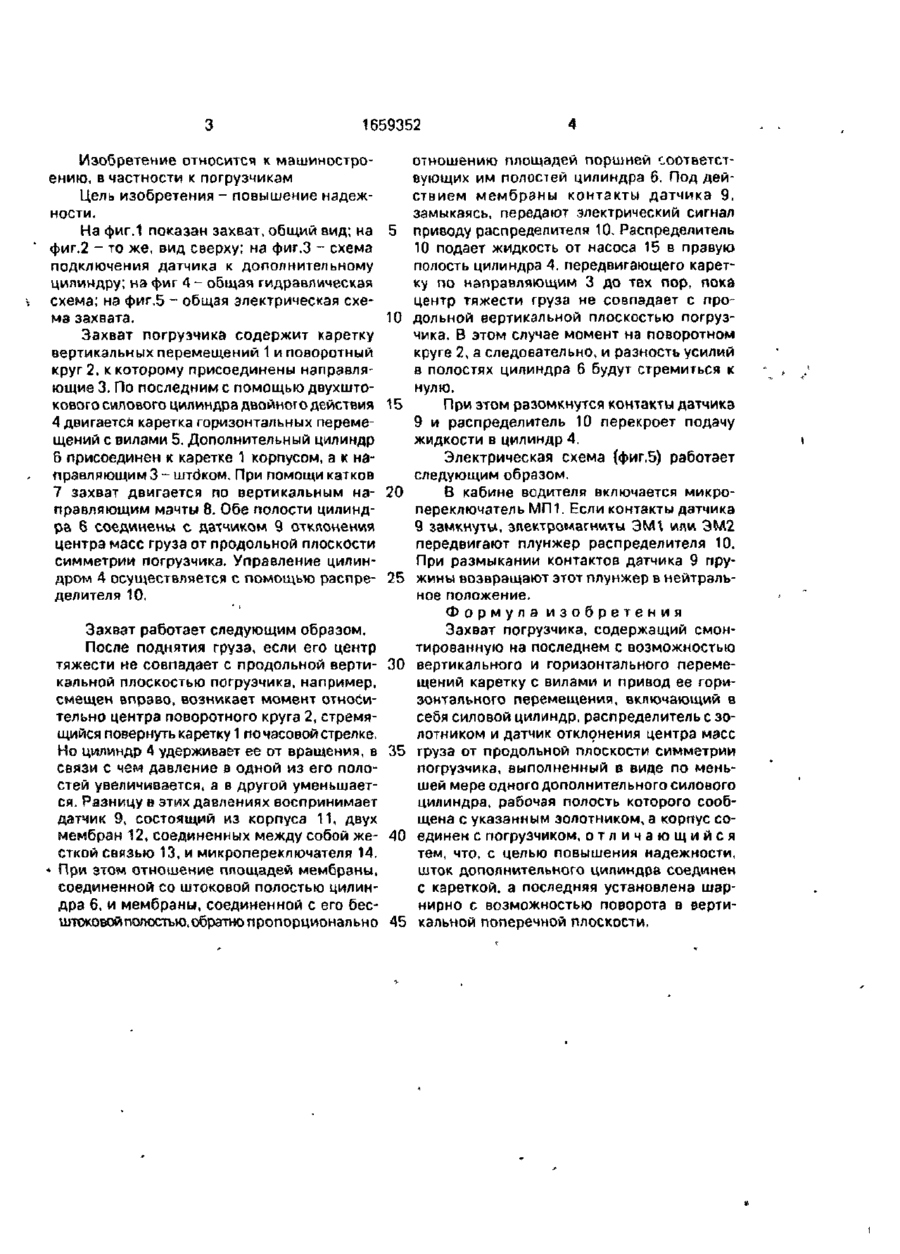
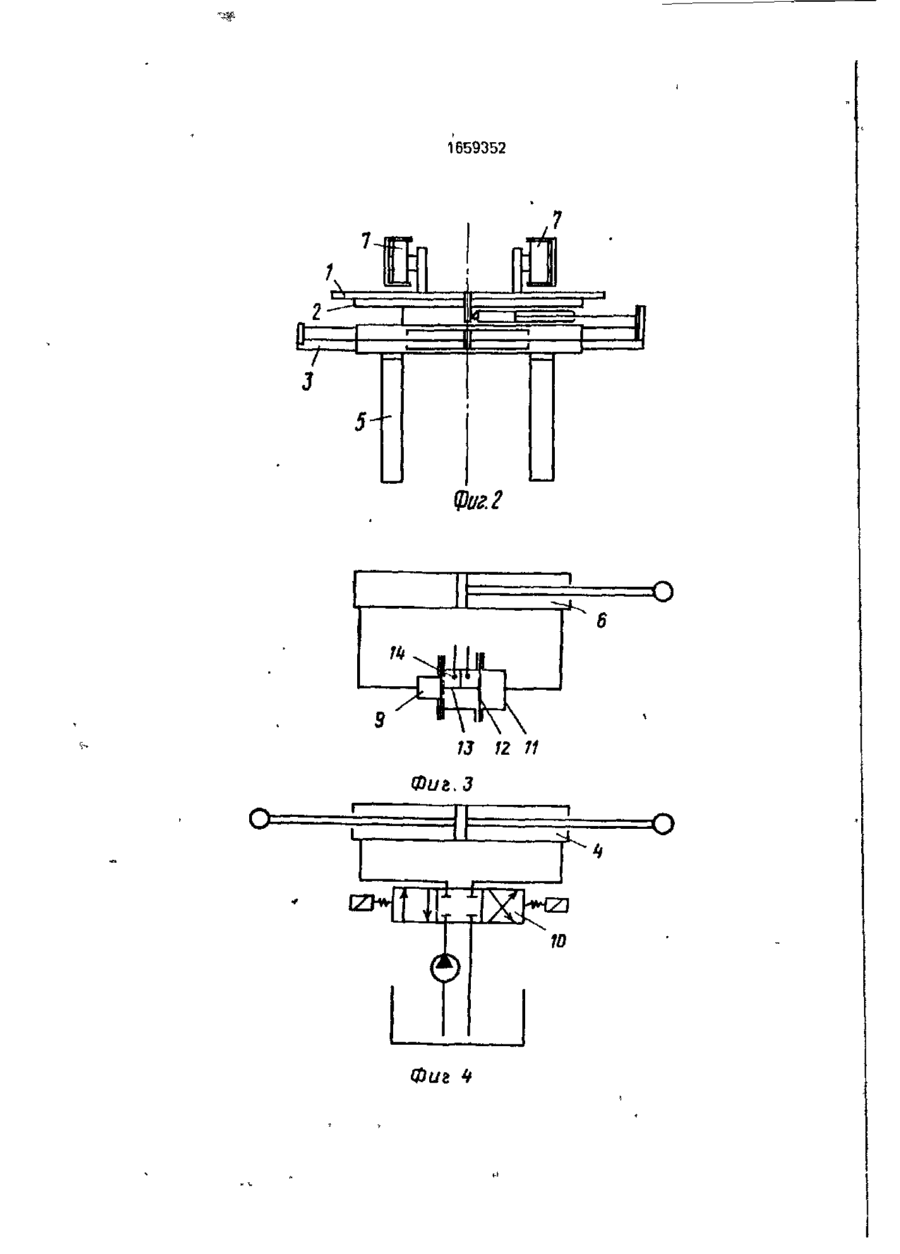
Изобретение относится к машиностроению. Цель изобретения - повышение на дежности. Захват погрузчика содержит каретку 1 вертикальных перемещений 1 и поворотный круг 2, к которому прикреплены направляющие 3 каретки горизонтального перемещения с вилами 5. К полостям цилиндра 6 присоединен датчик изменения давления для управления электроприводом золотника, который предназначен для подачи жидкостное цилиндр 4 горизонтального перемещения до совпадения центра тяжести груза с продольной вертикальной плоскостью погрузчика 5 ил ON СЛ W СЛ ю 1659352 Изобретение относится к машиностроению, в частности к погрузчикам Цель изобретения - повышение надежности. На фиг.1 показан захват, общий вид; на фиг.2 - то же, вид сверху; на фиг.З - схема подключения датчика к дополнительному цилиндру; на фиг 4 - общая гидравлическая схема; на фиг.5 - общая электрическая схема захвата. Захват погрузчика содержит каретку вертикальных перемещений 1 и поворотный круг 2, к которому присоединены направляющие 3. По последним с помощью двухштокового силового цилиндра двойное о действия 4 двигается каретка горизонтальных перемещений с вилами 5. Дополнительный цилиндр 6 присоединен к каретке 1 корпусом, а к направляющим 3-штсіком. При помощи катков 7 захват двигается по вертикальным направляющим мачты 8. Обе полости цилиндра 6 соединены с датчиком 9 отклонения центра масс груза от продольной плоскости симметрии погрузчика. Управление цилиндром 4 осуществляется с помощью распределителя 10. 5 10 15 20 25 Захват работает следующим образом. После поднятия груза, если его центр тяжести не совпадает с продольной верти- 30 кальной плоскостью погрузчика, например, смещен вправо, возникает момент относительно центра поворотного круга 2, стремящийся повернуть каретку 1 по часовой стрелке. Но цилиндр 4 удерживает ее от вращения, в 35 связи с чем давление а одной из его полостей увеличивается, а в другой уменьшается. Разницу в этих давлениях воспринимает датчик 9, состоящий из корпуса 11, двух мембран 12, соединенных между собой же- 40 сткой связью 13, и микропереключателя 14. • При этом отношение площадей мембраны, соединенной со штоковой полостью цилиндра 6, и мембраны, соединенной с его бесштоковойполостью.обратнопропорционально 45 отношению площадей поршней соответствующих им полостей цилиндра 6. Под действием мембраны контакты датчика 9, замыкаясь, передают электрический сигнал приводу распределителя 10. Распределитель 10 подает жидкость от насоса 15 в правую полость цилиндра 4, передвигающего каретку по направляющим 3 до тех пор, пока центр тяжести груза не совпадает с продольной вертикальной плоскостью погрузчика. В этом случае момент на поворотном круге 2, а следовательно, и разность усилий в полостях цилиндра 6 будут стремиться к нулю. При этом разомкнутся контакты датчика 9 и распределитель 10 перекроет подачу жидкости в цилиндр 4. Электрическая схема (фиг.5) работает следующим образом. В кабине водителя включается микропереключатель МП1. Если контакты датчика 9 замкнуты, электромагниты ЭМ1 или ЭМ2 передвигают плунжер распределителя 10. При размыкании контактов датчика 9 пружины возвращают этот плунжер в нейтральное положение. Формула изобретения Захват погрузчика, содержащий смонтированную на последнем с возможностью вертикального и горизонтального перемещений каретку с вилами и привод ее горизонтального перемещения, включающий в себя силовой цилиндр, распределитель с золотником и датчик отклонения центра масс груза от продольной плоскости симметрии погрузчика, выполненный в виде по меньшей мере одного дополнительного силового цилиндра, рабочая полость которого сообщена с указанным золотником, а корпус соединен с погрузчиком, о т л и ч а ю щ и й с я тем, что, с целью повышения надежности, шток дополнительного цилиндра соединен с кареткой, а последняя установлена шарнирно с возможностью поворота в вертикальной поперечной плоскости. 1659352 7 Фи* 2 о tzH PKZ3 кю . Фиг Ч 1659352 МП1 Фиг-S Редактор А.Долинич Составитель В.Момот Техред М Моргентал Корректор Э.Лончакова' "Заказ 1814 Тираж 430 Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб , 4/5 Производственно-издательский комбинат "Патент", г Ужгород, уп.Гагарина, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюGrip of lift loader
Автори англійськоюKozlynskyi Myroslav Petrovych, Pankiv Anatolii Teofilovych
Назва патенту російськоюЗахват погрузчика
Автори російськоюКозлинский Мирослав Петрович, Панькив Анатолий Теофилович
МПК / Мітки
МПК: B66F 9/06
Мітки: захоплювач, вантажника
Код посилання
<a href="https://ua.patents.su/4-16160-zakhoplyuvach-vantazhnika.html" target="_blank" rel="follow" title="База патентів України">Захоплювач вантажника</a>
Захоплювач вантажника
Номер патенту: 1886
Опубліковано: 20.12.1994
Автори: Козлинський Мирослав Петрович, Прищенко Олег Васильович
МПК: B66F 9/06
Мітки: вантажника, захоплювач
Формула / Реферат:
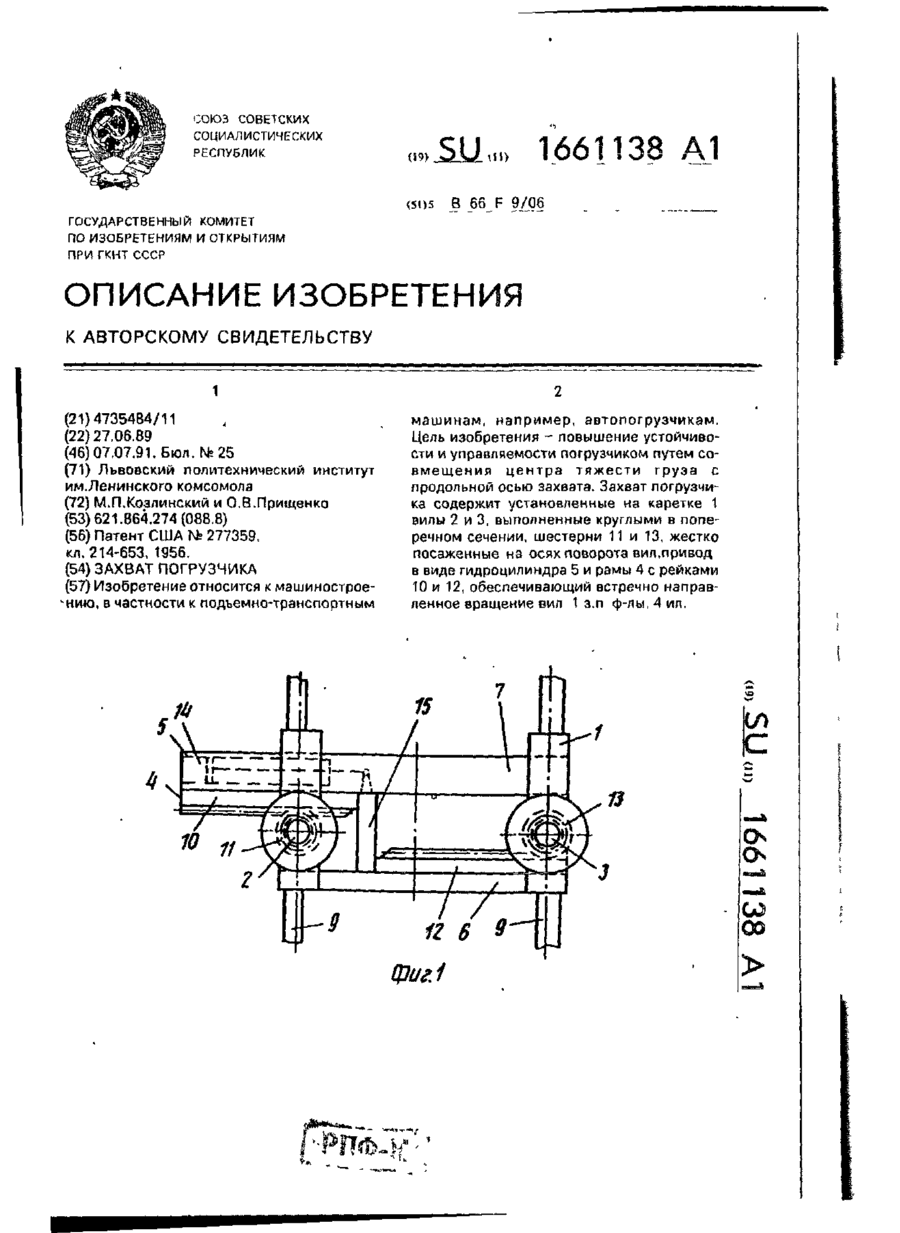
1. Захват погрузчика, содержащий пару вил круглого сечения, каждая из которых смонтирована на каретке последнего с возможностью вращения вокруг своей продольной оси, отличающийся тем, что, с целыегквышаэия устойчивости и управляемости погрузчиком путем совмещения центра тяжести груза с продольной осью захвата, вилы смонтированы с возможностью синхронного вращения приводом навстречу друг другу.2. Захват по п. 1, отличающийся тем,...
Обладання для кріплення противаги до рами вантажника
Номер патенту: 3834
Опубліковано: 27.12.1994
Автори: Хомяк Роман Семенович, Покотило Анатолій Михайлович
МПК: B66F 9/06
Мітки: вантажника, рами, противаги, кріплення, обладання
Формула / Реферат:
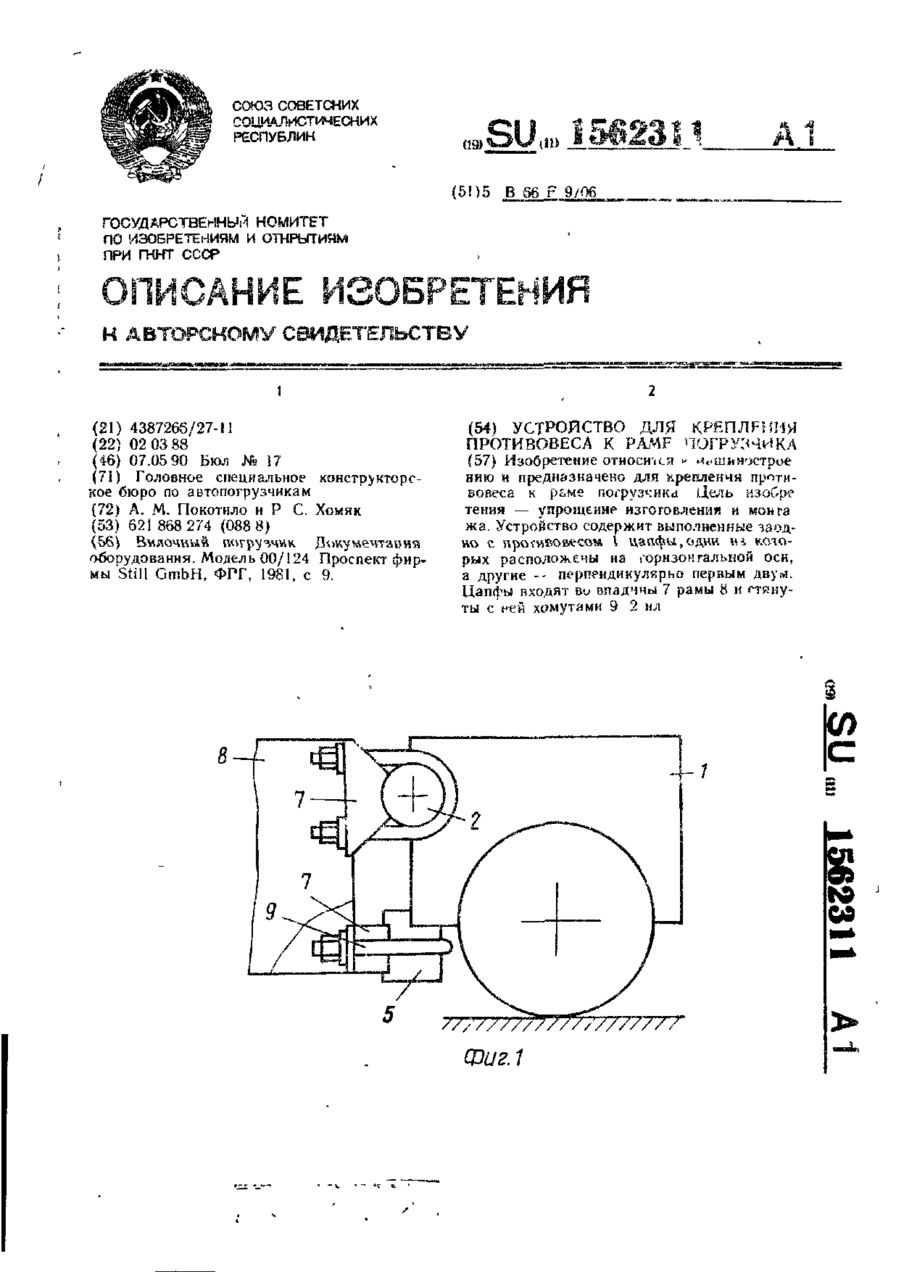
Устройство для крепления противовеса к раме погрузчика, содержащее резьбовые элементы, устанавливаемые с возможностью взаимодействия с отверстиями, которые выполнены в раме, отличающееся тем, что, с целью упрощения изготовления и монтажа, оно снабжено по меньшей мере двумя выполненными на наружных поверхностях противовеса несоосными цапфами, оси которых расположены в вертикальной поперечной плоскости с возможностью взаимодействия с...
Автоматичний магнітний захоплювач
Номер патенту: 1836
Опубліковано: 20.12.1994
Автори: Козлов Михайло Іванович, Гершенкрой Володимир Леонідович, Гордієнко Микола Іванович
МПК: B66C 1/00
Мітки: захоплювач, автоматичний, магнітний
Формула / Реферат:
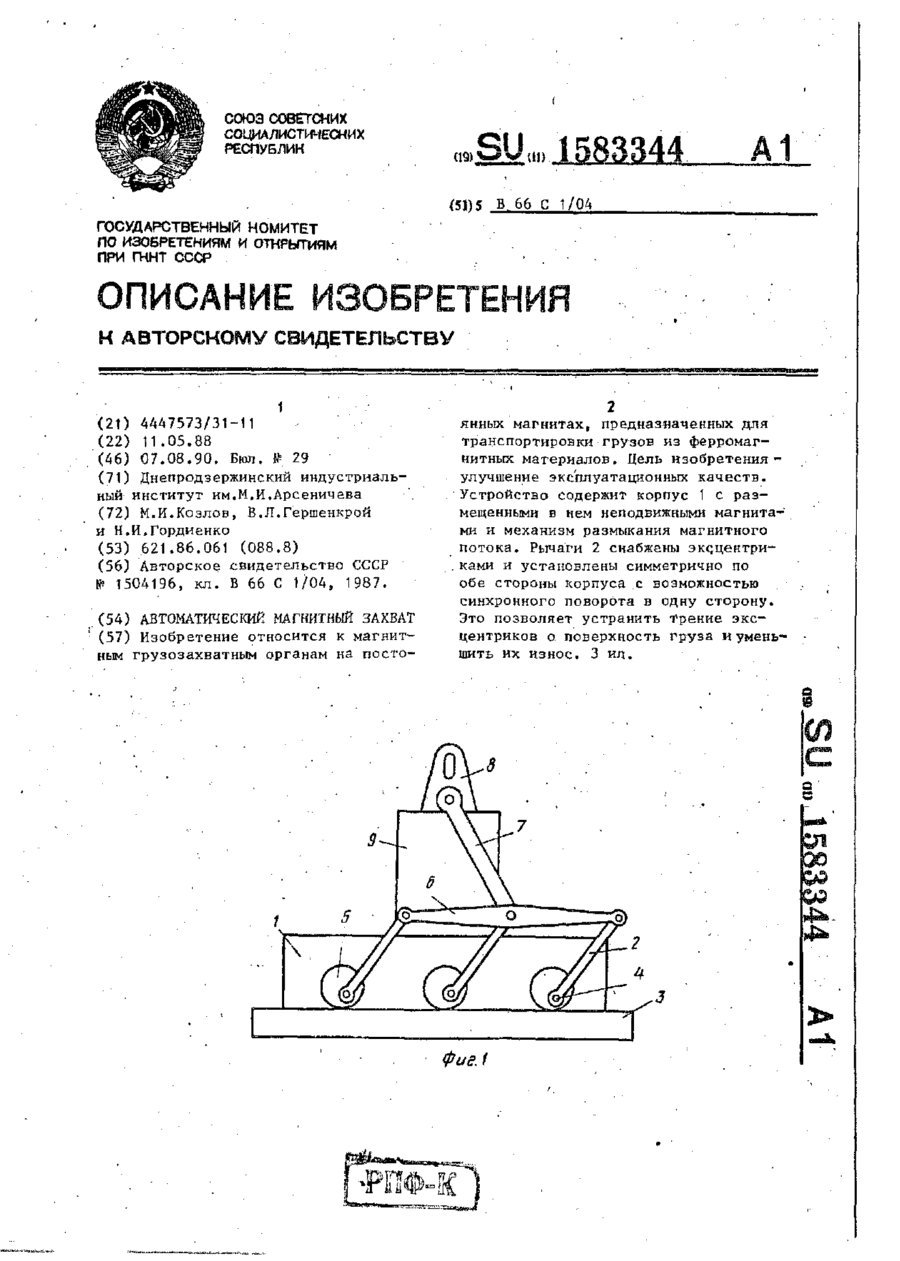
Автоматический магнитный захват, содержащий навешиваемый на крюк крана посредством серьги ползун четырехтактного механизма фиксации, корпус с размещенными в нем постоянными магнитами и механизм отрыва, включающий шарнирно закрепленные на противоположных сторонах корпуса отжимные элементы, кинематически соединенные с ползуном четырехтактного механизма фиксации, отличающийся тем, что, с целью повышения эксплуатационных качеств, отжимные...
Штирьовий захват до навантажувача
Номер патенту: 3759
Опубліковано: 27.12.1994
Автор: Рахманов Микола Миколайович
МПК: B66F 9/18
Мітки: навантажувача, штирьовий, захват
Формула / Реферат:
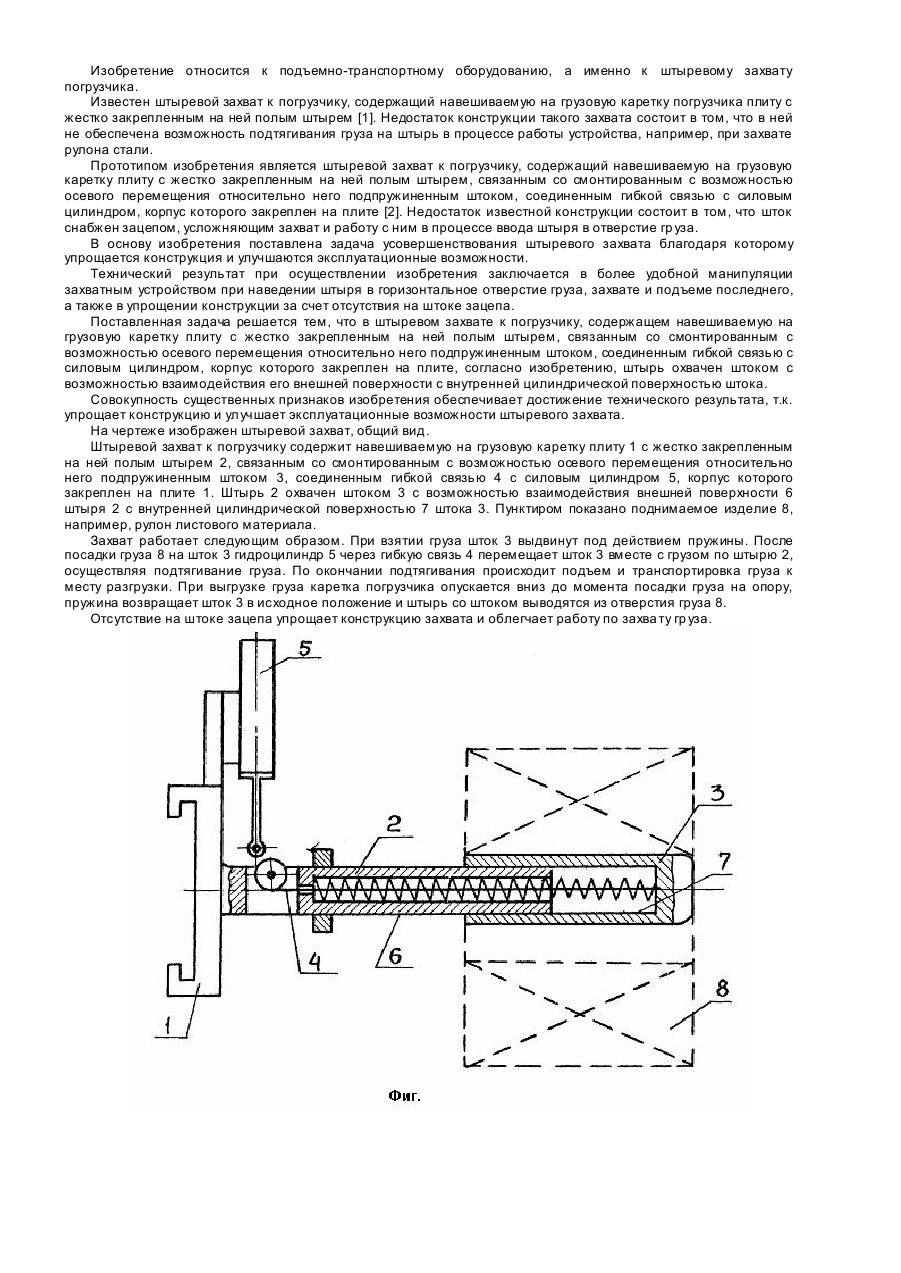
Штыревой захват к погрузчику, содержащий навешиваемую на грузовую каретку плиту с жестко закрепленным на ней полым штырем, связанным со смонтированным с возможностью осевого перемещения относительно него подпружиненным штоком, соединенным гибкой связью с силовым цилиндром, корпус которого закреплен на плите, отличающийся тем, что штырь охвачен указанным штоком с возможностью взаимодействия его внешней поверхности с внутренней цилиндрической...
Вила вантажника

Номер патенту: 986
Опубліковано: 30.12.1993
Автори: Маякін Андрій Васильович, Поляков Володимир Миколайович, Парайко Михайло Петрович, Попович Іван Григорович, Сироішко Іван Іванович, Філєвіч Станіслав Анатольович, Немировський Іван Петрович, Куцигін Володимир Дмитрович, Махнін Владлен Семенович, Ліханській Владлен Сергійович
МПК: B66F 9/06
Мітки: вантажника, вила
Формула / Реферат:
формула изобретения1. Вилы погрузчика, состоящие из горизонтального и вертикального участков, выполненных в поперечном сечении П-образными с полкой и стенками постоянной толщины, и сопрягающего их участка, отличающиеся тем, что, с целью повышения долговечности и снижения металлоемкости, сопрягающий участок выполнен прямоугольного поперечного сечения, высота которого больше толщины полки на остальных участках и выполнена увеличивающейся...
Попередній патент: Прилад для побудови аксонометричних зображень
Наступний патент: Пристрій для одержання каліброваних значень девіації частоти
Випадковий патент: Спосіб прискорення росту волосся за індріксоном