Гідросистема вантажного крану
Номер патенту: 16511
Опубліковано: 29.08.1997
Автори: Лисенко Володимир Сергійович, Домрачєв Олександр Федорович, Хрущов Валерій Миколайович, Рибко Олександр Володимирович, Богданов Сергій Михайлович
Формула / Реферат
1 .Гидросистема грузового крана, содержащая і гидроцилиндр стрелы, датчик давления, подключенный к поршневой полости этого гидроцилиндра, который подсоединен к трехпознционному і гидрораспредслителю, гидромотор привода грузоподъемной лебедки, подсоединенный к второму трехпозиционному гидрораспредслителю, а , также насос к которому гидрораспределители подключены параллельно, гидробак, пульт управления с кнопочными станциями управления стрелой и лебедкой и элементами памяти, связанными с органами управления трехлинейными гидрораспределителями, систему управления, включающую логические элементы И, ИЛИ, НЕ и элемент выдержки времени, отличающаяся тем, что, с целью повышения надежности, безопасности работы, она снабжена вторым насосом, обратными клапанами, установленными на выходе первого и второго насосов, и автоматом разгрузки одного из насосов, и логическим блоком управления, датчик давления выполнен в виде реле давления, кнопочная станция управления лебедкой и датчик давления связаны с входами логического блока управления, причем выход кнопочной станции і связан с входами логического элемента И и элемента выдержки времени этого блока, а датчик давления связан с вторым входом логического элемента И этого блока, выходы этого логического элемента и элемента выдержки времени связаны с входами логического элемента ЗАПРЕТ этого блока, а выход элемента ЗАПРЕТ связан с органом управления автомата разгрузки. 2. Гидросистема по п.1, отличающаяся тем, что ; она снабжена вторым логическим блоком управления, кнопочные станции и датчик давления через і этот логический блок управления связаны с органами управления механизмами подъема груза и стрелы, в линию управления грузовой лебедкой і установлен первый логический элемент ИЛИ этого , блока, а в линию управления гидроцилиндром стрелы установлены последовательно первый логический элемент ЗАПРЕТ и второй логический і элемент ИЛИ этого блока, причем кнопочная стан-[ ция управления гидроцилиндром стрелы через пер-& вый логический элемент И, элемент выдержки времени и второй логический элемент ЗАПРЕТ этого блока связана с вторым входом первого элемента ИЛИ этого блока, датчик давления связан с входами первого, второго логических элементов И и первого логического элемента ЗАПРЕТ этого блока, при этом выход элемента выдержки времени этого блока связан с вторым входом второго логического элемента ИЛИ этого блока, причем выход первого логического элемента ИЛИ этого блока связан с ' органом управления механизма подъема груза и с
первым блоком управления, а выход второго элемента ИЛИ второго блока управления связан с органом управления механизма подъема стрелы.
Текст
Изобретение относится к гидроприводам и системам управления для грузоподъемных машин, например для грузовых Краков. Цель изобретения — повышение надежности, безопасности работы крана Для этого на выходе насосов 6 и 25 установлены обратные клапаны 26, 27, а насос 25 снабжен автоматом разгрузки. Кнопочная станция 10 -L J-.ч. лемент ЗАПРЕТ 34 6 юча 32 связана с вторым входом первого элемента ИЛИ 18 блока 32, датчик 2 давления связан с входами первого, второго логических элементов 10 15 30 45 50 5Б И Ї6, 17 и первого логического элемента ЗАПРЕТ 33 блока 32, при эгом вычод элемента 24 выдержки времени блока 32 связал с вторым входом второго логического элемента ИЛИ 19 блока 32, причем выход первого логического элемента ИЛИ 18 этогб блока связан с органом 12 управлення механизма подъема груза и с первым блоком 29 управления, а выход второго элемента ИЛИ 19 второго блока 32 управления связан с органом 14 управления механизма подъема стрелы Логические злемеы L* ЗАПРЕТ 30, 33 и 34 состоят из логических элементов И 35, 36 и 37 и элементов НЕ 20, 21 и 22. Гидросистема грузового крана работает следующим образом. Устанавливают под требуемым углом стрелу. Для этого включают насосы 6 и 25 и для подъема стрелы нажимают кнопку «Подъем стрелы» кнопочной станции 9 пульта 8 управления. Сигнал по линии управления поступает к входам логических элементов И 16 и 36 логического блока 32 управления. Так как нагрузка на крюке отсутствует, контакты датчика 2 давления разомкнуты и сигнал равен нулю. Благодаря этому сигнал на выходах логических элементов И 16 равен нулю, НЕ 21 равен единице, И 36 ранен единице, ИЛИ 19 равен единице. Орган 14 управления переключает гидрораспределитель 3 в правую по схеме позицию. Шток гидроцилиндра I выдвигается, осуществляя подъем стрелы. При нажатии на кнопку «Стоп» сигналы в линиях управления раэн нулю, благодаря чему подъем стрелы прекращается. Если требуется осуществить опускание стрелы, нажимают кнопку «Опускание стрелы» пульта 8 управления. Сигнал по линии управления поступает к органу 13 управлечия. Гидрораспределитель 3 переключается R левую по схеме позицию Рабочая жид кость от насосов 6 и 25 поступает в штоковую голость гидроцилиндра !, который осуществляет опускание стрелы После этого опускают крюк. Оператор нажимает кнопку «Опускание груза» на пульте & упрагления, сигнал по линии управления поступает к органу 11 управления. Гидрорасгфеделйтель 5 переключается в левую по схеме позицию, благодаря чему гидромотор 4 через редуктор вращает барабан грузовой лебедки и осуществляется опускание крюка Далее закрепляют на крюке груз и нажимают кнопку «Подъем груза» на пульте управления. Сигнал по линии управления поступает к логическому элементу ИЛИ 18 логического блока 32. С выхода этого элемента сигнал поступает к органу 12 управлений. Гидрораспределитель 5 переключается в правую по схеме позицию. Рабочая жидкость от насосов 6 и 25 поступает к п-дромотору А, который начинает і 5896'З наматывать трос на барабан грузовой лебедки, пока не повысится давление в поршневой полости гидроцилиндра 1 стрелы О/^сг-ременно сигнал поступает на входы логического элемента И 15 и элемента 23 выдержки времени логического блока 29 управления. подачи насосов 6 и 25, который был описль выше, а гидрораспределитель 3 находится чоц действием пружин в средней по схеме Через время І2 настройки элемента 36 выдержки времени сигнал подается на входы логических элементов НЕ 22 и И 17. Под Если вес груза, закрепленного на крюке, действием пружин гидрораспределитель 5 незначителен, то на выходе датчика 2 давпереключается в среднюю по схеме позицию, ления сигнал равен нулю, на выходах логиа гидромотор 4 останавливается. Одновреческих элекччюв И 15 и 35 сигналы также менно, так как имеются сигналы, орган 14 равны нулю, ягтомат 28 разгрузки не разуправления переключает гидрораспределигружает насос 25 от давленья и подъем груза тель 3 в правую по схеме позицию и осуосуществляется при подводе к гидромотору 4 ществляется дальнейший подъем груза месуммарной подачи насосов б и 25. ханизмом подъема стрелы. Если же вес груза таков, что замыкаются Дроссели с обратными клапанами обесконтакты датчика 2 дгзления, го сигнал печивают заданные скорости движения при поступает на второй вход логического элеподъеме, опускании стрелы и опускании грумента И 15, сигнал подводится к входу логиза. Гидрозамок предотвращает самопроизческого элемента И 35. Так как на выходе вольное опускание стрелы при нейтральном элемента 23 выдержки времени сигнал поположении гидрораспределителч 3. Предохявляется лишь через время і\, то автомат 2Я 2G ранительный клапан и автомат 28 разгрузки разгрузки соединяет напорную гидролинию защищают систему от перегрузки. насоса 25 с гидробаком 7 в момент начала подъема груза грузовой лебедкой. ОсуществГакЕ-ш образом предлагаемое техническое ляется плавное трогакие с места и подъем решение позволяет осуществить подъем гругруза с начальной малой скоростью. Через за путем автоматического последовательвремя t\ появляется сигнал и отключается ного включения нескольких скоростей двиразгрузка насоса 25, благодаря чему сумжения грузовой лебедки, что увеличивает марная подачд насосов 6 и 25 подводится плавность подъема, а следовательно, привок гидромотору 4, осуществляя дальнейшее дит к увеличению надежности, безопасности плавное увеличение скорости подъема груза. работы крана, увеличению производительЕсли гидромотор 4 выполнен регулируе-^ь-м, ности работы за счет возможного увеличения например регулируемым по давлению, то максимальной скорости подъема груза. Реон обеспечивает дополнительное регулировашение позволяет расширить эксплуатационние скорости движения в зависимости от ные возможности крана за счет обеспечения веса груза, а следовательно, еще большую возможности подъема груза механизмом плавность движения. подъема стрелы. При этом в автоматическом Остановка и опускание груза обеспечи- 35 цикле вначале обеспечивается подъем груза вается при нажатии кнопок «Стоп» и «Опуснри нескольких скоростях движения, а затем кание груза» на пульте 8 управления При подъем груза механизмом подъема стрелы этом в линию управления поступают соответпри остановленной грузовой лебедке, что ствующие сигналы увеличивает надежность и безопасность работы крана Если требуется осуществить подъем груза механизмом подъема стрелы, то нажи- 40 мают кнопку «Подъем стрелы» пульта 8 упФормула изобретения равления. Если вес груза невелик, то на выходе датчика 2 давления отсутствует сигнал 1. Гидросистема грузового крана, содери работа механизма подъема стрелы осужащая гидроцилиндр стрелы, датчик давлеществляется гак же, как это было описано ния, подключенный к поршневой полости выше. этого гидроцилиндра, который подсоединен Если же вес груза значителен, на выходе к трех позиционному гидоорасиг>е делителю, датчика 2 давления вырабатывается сигнал, гкдромотор привода грузоподъемной лебедкоторый поступает на входы логических элеки, подсоединенный к второму трехпо?.иментов И 16 и 17 и НЕ 21 логического блоj ионному гидрооаспределителю, а также ка 32 управления. Далее сигнал поступает насос, к которому гидрораспределители подна входы логического элемента И 37 и элеключены параллельно, гидробак, пульт упмента 24 выдержки времени. В нзчзльный равления с кнопочными станциями управлемомент сигналы равны нулю Сигнал с выхония стоелой А лгбедкой и элементами памяти, да логического элемента ИЛИ 18 логическосвязанными с органами управления трехлиго блока 32 управления поступает к органейными гидрораспределителями, систему ну І2 управления гидрораспределителя 5 55 управления, включающую логические элеи ка вход логического блока 29, благодаря менты И, ИЛИ, НЕ и элемент выдержки чем./ осуществляется подъем груза грузорой временя, отличающаяся тем, что, с целью лебедкой в режиме подвода к гидромотору 4 повышения надежности, безопасности рабополачи сначала насоса б, а затем суммарной ты, она снабжена вторым насосом, обрат 1689673 S лен первый логический элемент ИЛИ это г о ными клапанами, установленными на выходе блока, а в линию управлечия гидроцилиндпервого и второго насосов, и автоматом разром стрелы установлены последовательно грузки одного из насосов, и логическим блопервый логический элемент ЗАПРЕТ и втиком управления, датчик давления выполнен рой логический элемент ИЛИ этого блока, в виде реле давления, кнопочная станция причем кнопочная станция управления гид управления лебедкой и датчик давления роцилиндром стрелы через первый логичесвязаны с входами логического блока упский элемент И, элемент выдержки времени равления, причем выход кнопочной станции и второй логический элемент ЗАПРЕТ этого связан с входами логического элемента И блока связана с вторым входом первого элеи элемента выдержки времени этого блока, мента ИЛИ этого блока, датчик давления а датчик давления связан с вторым входом связан с входами первого, второго логичелогического элемента И этого блока, выходы ских элементов И и первого логического этого логического элемента и элемента выэлемента ЗАПРЕТ этого блока, при этом держки времени связаны с входами логичевыход элемента выдержки времени этого ского элемента ЗАПРЕТ этого блока, а выблока связан с вторым входом второго лоход элемента ЗАПРЕТ связан с органом 15 гического элемента ИЛИ этого блока, приуправления автомата разгрузки чем выход первого логического элемента 2 Гидросистема по п 1, отличающаяся ИЛИ этого блока связан с органом управтем, что она снабжена вторым логическим ления механизма подъема груза и с первым блоком управления, кнопочные станции и блоком управления, а выход второго эледатчик давления через этот лоїический блок управления связаны с органами управления 20 мента ИЛИ второго блока управления связан с органом управления механизма подъмеханизмами подъема груза и стрелы, в лиема стрелы. нию управления грузовой лебедкой установ Составитель Ю Ломахин Редактор С Кулакова Техред А Кравчук Корректор Н Ревская Заказ 3801 Тираж Подписное ВНИИПИ Государственного комитета по изобретениям и открьтиям при І КНТ СССР 113035, Москва, Ж —35, Раушская наб , д 4/5 Производственно-издательский комбинат «Патент», г Ужгород, ул Гагарина 101
ДивитисяДодаткова інформація
Назва патенту англійськоюHydraulic system of cargo crane
Автори англійськоюDomrachev Oleksandr Fedorovych, Lysenko Volodymyr Serhiiovych, Bohdanov Serhii Mykhailovych, Rybko Oleksandr Volodymyrovych, Khruschov Valerii Mykolaiovych
Назва патенту російськоюГидросистема грузового крана
Автори російськоюДомрачев Александр Федорович, Лысенко Владимир Сергеевич, Богданов Сергей Михайлович, Рыбко Александр Владимирович, Хрущов Валерий Николаевич
МПК / Мітки
МПК: B66C 23/00, F15B 11/00
Мітки: вантажного, крану, гідросистема
Код посилання
<a href="https://ua.patents.su/4-16511-gidrosistema-vantazhnogo-kranu.html" target="_blank" rel="follow" title="База патентів України">Гідросистема вантажного крану</a>
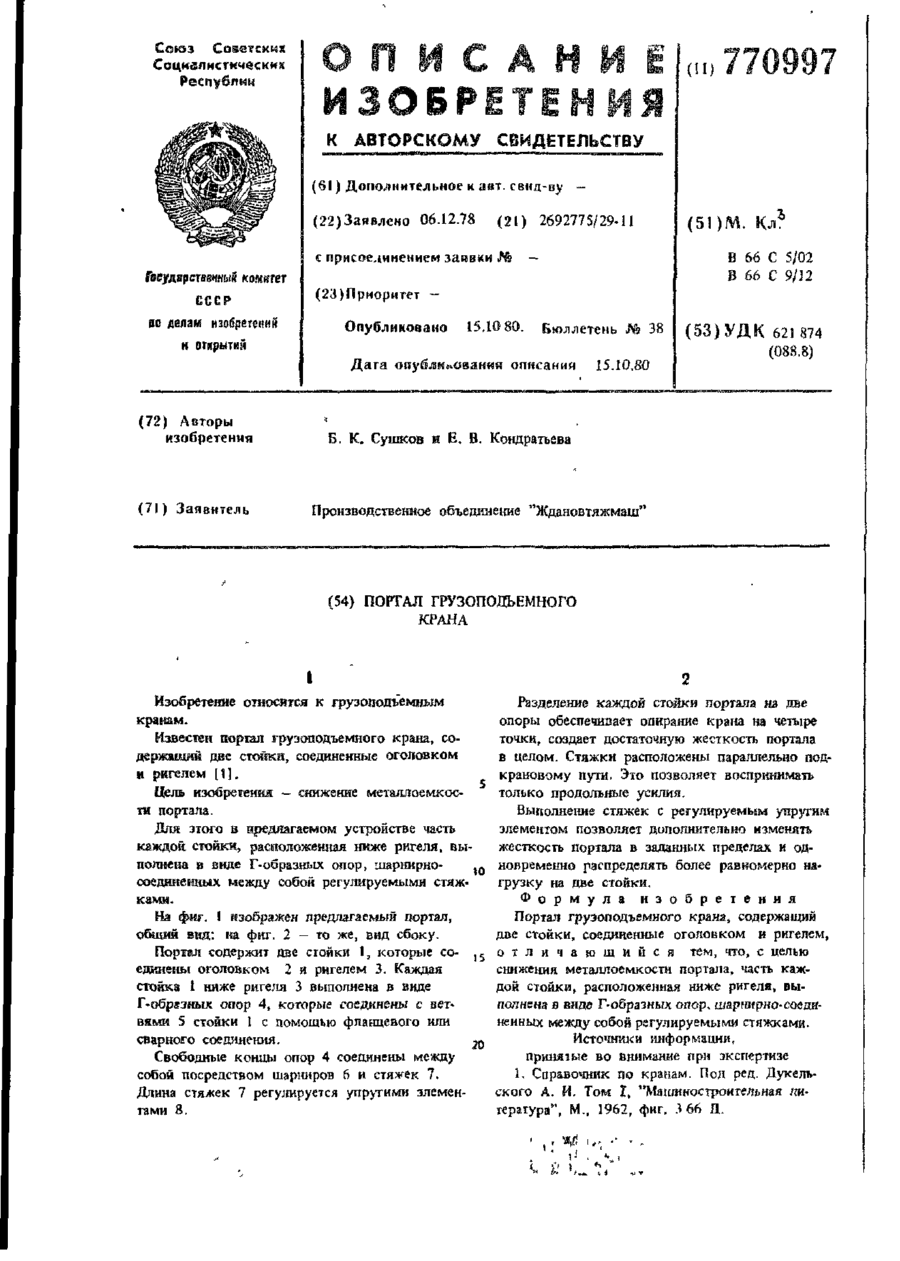
Портал вантажного крану
Номер патенту: 5186
Опубліковано: 28.12.1994
Автори: Сушко Броніслав Константінович, Кондратьева Елізавета Владімірівна
Мітки: крану, вантажного, портал
Формула / Реферат:
Портал грузоподъемного крана, содержащий две стойки, соединенные оголовком и ригелем, отличающийся тем, что, с целью снижения металлоемкости портала, часть каждой стойки, расположенная ниже ригеля, выполнена в виде Г-образных опор, шарнирно-соединенных между собой регулируемыми стяжками.
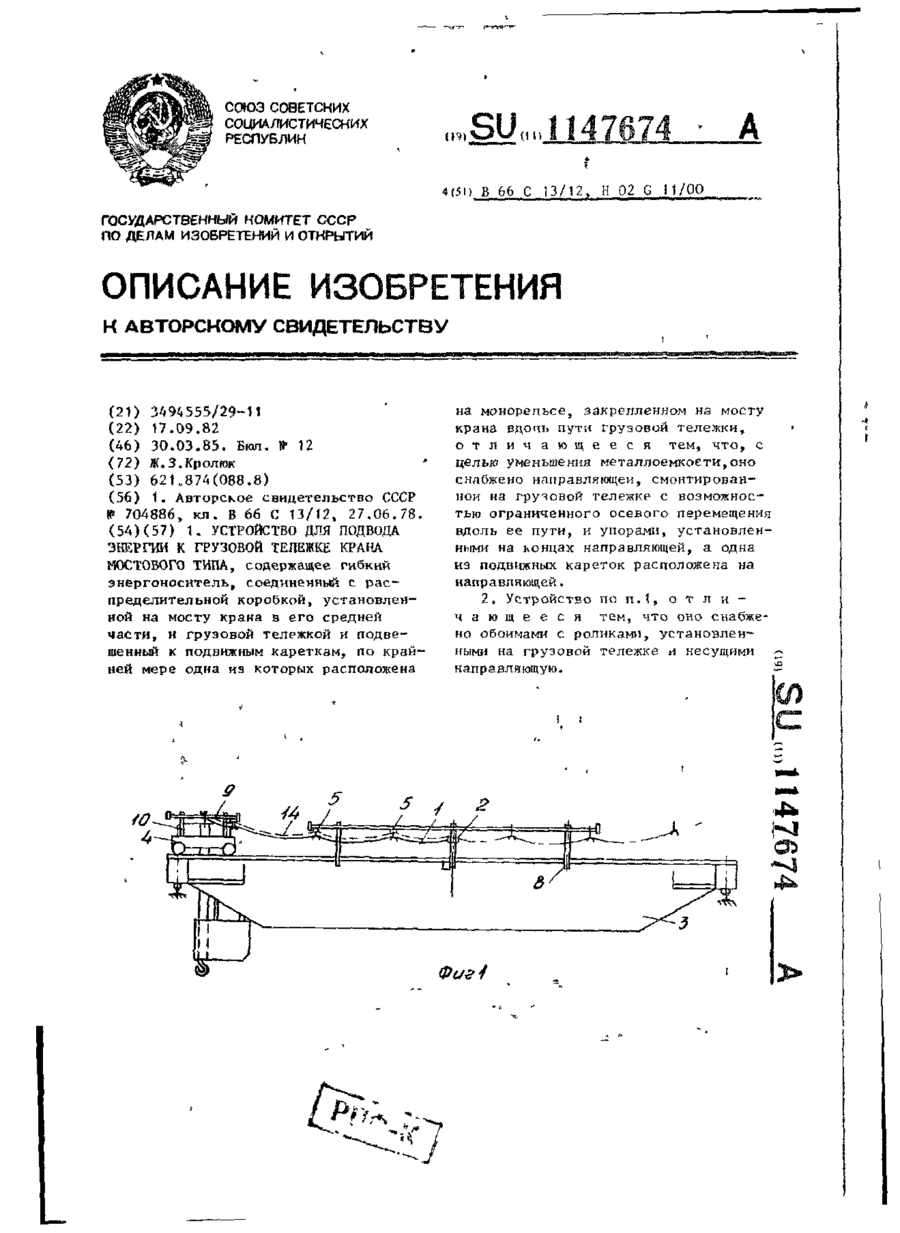
Пристрій для підводу енергії до вантажного візка крану мостового типу
Номер патенту: 4504
Опубліковано: 27.12.1994
Автор: Кролюк Жорж Захарович
МПК: B66C 13/00, H02G 11/00
Мітки: крану, візка, типу, енергії, вантажного, пристрій, мостового, підводу
Формула / Реферат:
1. Устройство для подвода энергии к грузовой тележке крана мостового типа, содержащее гибкий энергоноситель, соединенный с распределительной коробкой, установленной на мосту крана в его средней части, и грузовой тележкой и подвешенный к подвижным кареткам, по крайней мере одна из которых расположена на монорельсе, закрепленном на мосту крана вдоль пути грузовой тележки, отличающееся тем, что, с целью уменьшения металлоемкости, оно...
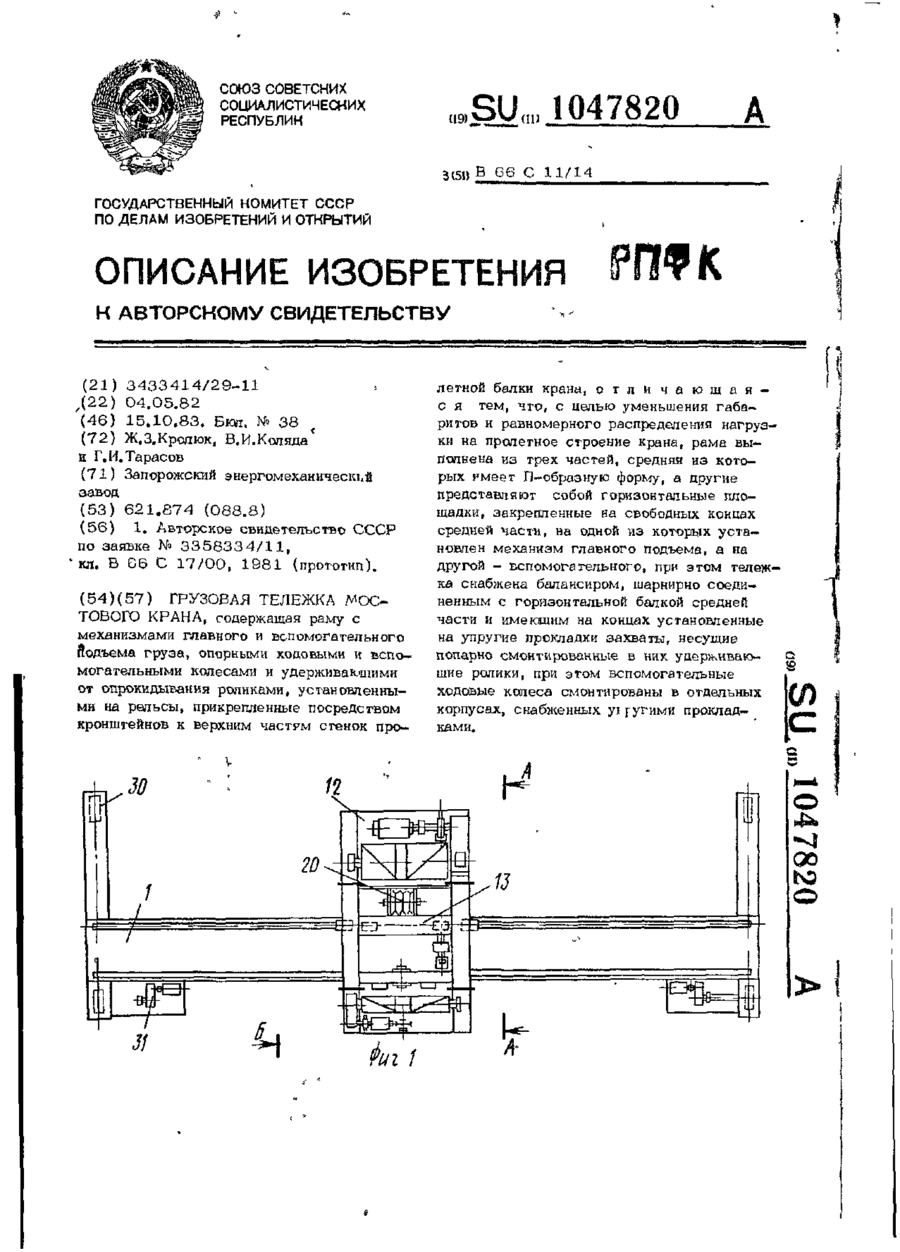
Вантажний візок мостового крану
Номер патенту: 4502
Опубліковано: 27.12.1994
Автори: Тарасов Геннадій Іванович, Кролюк Жорж Захарович, Коляда Володимир Іванович
МПК: B66C 11/00
Мітки: вантажний, візок, мостового, крану
Формула / Реферат:
Грузовая тележка мостового крана, содержащая раму с механизмами главного и вспомогательного подъема груза, опорными ходовыми и вспомогательными колесами и удерживающими от опрокидывания роликами, установленными на рельсы, прикрепленные посредством кронштейнов к верхним частям стенок пролетной балки крана, отличающаяся тем, что, с целью уменьшения габаритов и равномерного распределения нагрузки на пролетное строение крана, рама выполнена из...
Пристрій для захисту перетворювача
Номер патенту: 8219
Опубліковано: 29.03.1996
Автори: Кражан Віктор Степанович, Гончаренко Віктор Костянтинович, Сидоренко Володимир Олексійович
Мітки: пристрій, захисту, перетворювача
Формула / Реферат:
Устройство для защиты преобразователя, снабженного системой импульсно-фазового у правления, содержащее в каждом плече преобразователя датчик включенного состояния вентилей, соединенный с первым входом логического элемента И, причем выходы всех элементов И через элемент ИЛИ подключены к исполнительному органу защиты, отличающееся тем, что, с целью упрощения и повышения надежности, оно снабжено блоком селекции для каждого плеча...
Консольний візок мостового однобалочного крану
Номер патенту: 4505
Опубліковано: 27.12.1994
Автор: Кролюк Жорж Захарович
МПК: B66C 17/00
Мітки: однобалочного, візок, крану, мостового, консольний
Формула / Реферат:
1. Консольная тележка мостового однобалочного крана, содержащая смонтированные на раме ходовые колеса для опирання на ходовой рельс моста крана, упорные ролики для взаимодействия с нижней поверхностью головки другого рельса моста крана и механизмы главного и вспомогательного подъемов с нарезными барабанами, их приводами и грузовыми канатными подвесками, отличающаяся тем, что, с целью повышения надежности путем уменьшения нагрузки на...
Попередній патент: Спосіб випробування зразків на згиб
Наступний патент: Пристрій з тунельним переходом
Випадковий патент: Надвисокочастотний діелектричний матеріал на основі титанату барію неодиму