Акустичний датчик швидкості течії
Формула / Реферат
Акустический датчик скорости течения, содержащий корпус, на нижнем торце которого установлено три наклонных стойки, на каждой из которых установлено по одному излучателю пье-зоакустических сигналов, три приемника акустических сигналов, отличающийся тем, что, с целью повышения точности измерения, наклонные стойки выполнены разной длины, излучатели и приемники акустических сигналов объединены в пары, при этом их излучающие и приемные поверхности совмещены в каждой паре под углом в 120 , причем пары излучатель-приемник расположены в плоскости, лежащей под углом в 45° по отношению к нормальной и поперечной осям корпуса прибора.
Текст
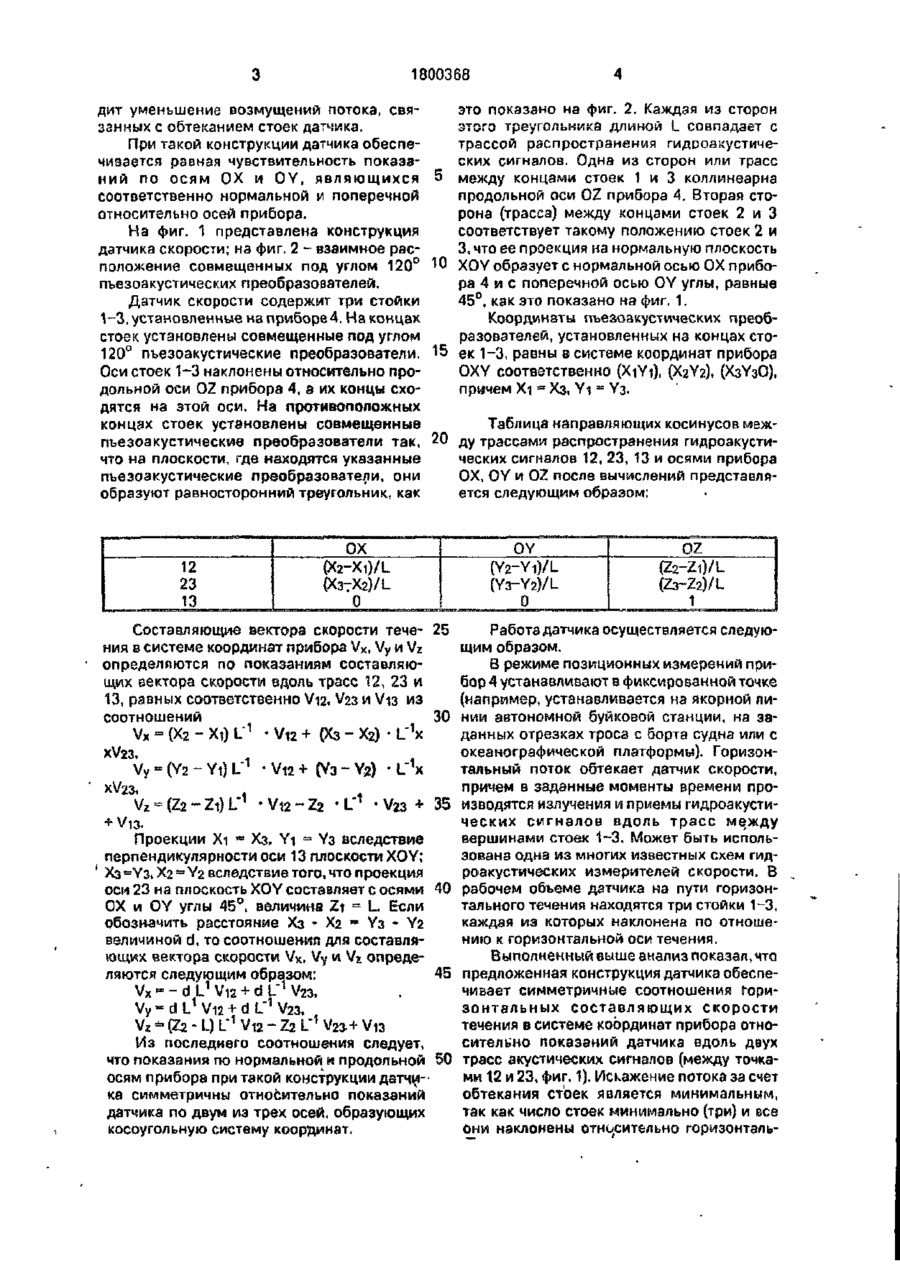
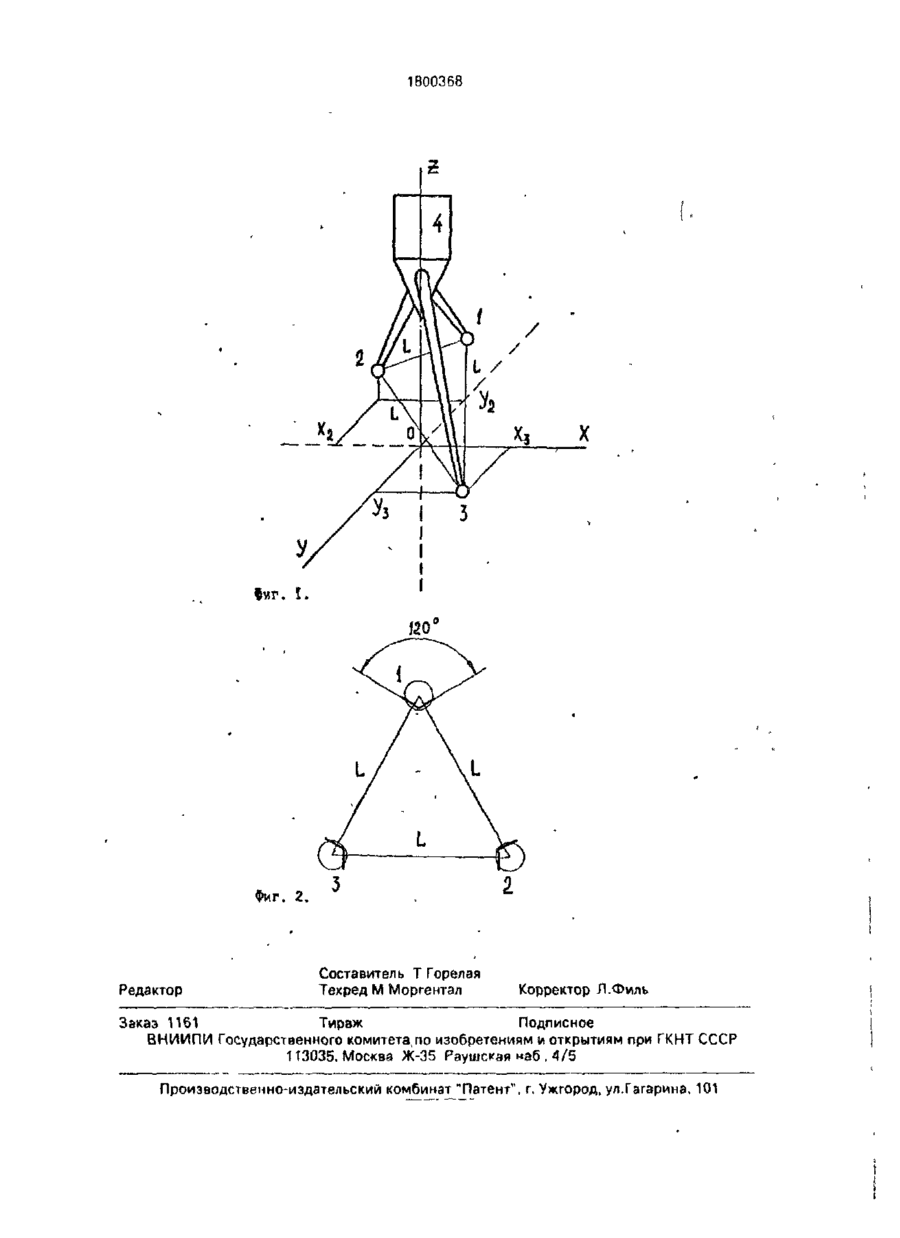
Использование, измерение скорости течения в океане, в том числе в режиме вертикального и горизонтального зондирования. Сущность изобретения: акустический датчик скорости течения содержит корпус, три наклонные стойки различной длины, три приемника и три излучателя акустических сигналов, объединенных в пары, излучающие и приемные поверхности в каждой паре совмещены под углом 120°, пары излучатель-приемник расположены s плоскости, лежащей под углом 45° по отношению к нормальной и поперечной осям корпуса прибора. 2 ил. Изобретение относится к технике измерения скорости текучих сред и может быть использовано для измерения скорости течения в океане в том числе в режиме вертикального и горизонтального зондирования, а также в позиционном режиме. Цель изобретения - повышение точности измерений скорости течения за счет уменьшения искажений поля скорости течения в рабочем объеме датчика. Поставленная цель достигается тем, что в акустическом датчике скорости течения, содержащем корпус, на нижнем конце которого установлены три наклонные стойки, на каждой из которых установлено по одному излучателю пьезоакустических сигналов, и три приемника акустических сигналов, наклонные стойки выполнены разной длины, излучатели и приемники акустических сигналов объединены в пары, при этом их излу чающие и приемные поверхности совмещены в каждой паре под углом 120°, причем пары излучатель-приемник расположены в плоскости, лежащей под углом 45° к нормальной и поперечной осям корпуса прибора. При такой конструкции в рабочем обьеме датчика находятся три наклонные стойки, что значительно меньше семи стоек в прототипе. Кроме того, все три стойки являются наклонными по отношению к горизонтальному потоку при выполнении позиционных измерений или к квазивертикальному вектору скорости при зондировании, когда скорость зондирования значительно превышает скорость течения. При обтекании наклонных стоек их гидродинамическое сопротивление уменьшается пропорционально величине sin 3 а (а- угол между направлением вектора скорости и направлением оси стойки). При этом происхо со о о 00 1800368 дит уменьшение возмущений потока, связанных с обтеканием стоек датчика. При такой конструкции датчика обеспечивается равная чувствительность показаний по осям ОХ и OY, я в л я ю щ и х с я соответственно нормальной и поперечной относительно осей прибора. На фиг. 1 представлена конструкция датчика скорости; на фиг. 2 - взаимное расположение совмещенных под углом 120° пъезоакустических преобразователей. Датчик скорости содержит три стойки 1-3, установленные на приборе 4. На концах стоек установлены совмещенные под углом 120° пъезоакустические преобразователи. Оси стоек 1-3 наклонены относительно продольной оси OZ прибора 4, а их концы сходятся на этой оси. На противоположных концах стоек установлены совмещенные пьезоакустические преобразователи так, что на плоскости, где находятся указанные пьезоакустические преобразователи, они образуют равносторонний треугольник, как 12 23 13 это показано на фиг. 2. Каждая из сторон этого треугольника длиной L совпадает с трассой распространения гидроакустических сигналов. Одна из сторон или трасс 5 между концами стоек 1 и 3 коллинеарна продольной оси OZ прибора 4. Вторая сторона (трасса) между концами стоек 2 и 3 соответствует такому положению стоек 2 и 3, что ее проекция на нормальную плоскость Ю XOY образует с нормальной осью ОХ прибора 4 и с поперечной осью OY углы, равные 45°, как это показано на фиг, 1. Координаты пъезоакустических преобразователей, установленных на концах сто15 ек 1-3, равны в системе координат прибора OXY соответственно (XiYi). (X2Y2)( (X3Y3O), причем Xi ~ Хз, Yi = Y3. Таблица направляющих косинусов меж20 ду трассами распространения гидроакустических сигналов 12, 23, 13 и осями прибора OX, OY и OZ после вычислений представляется следующим образом; ОХ (X 2 -Xi)/L (X37X2)/L 0 Составляющие вектора скорости тече- 25 ния в системе координат прибора V x , Vy и Vz определяются по показаниям составляющих аектора скорости вдоль трасс 12, 23 и 13, равных соответственно V12, V23 и V13 из соотношений 30 -1 (Х2 - Xi) L"1 • V12 + (Хз - Х2) • -1. ' x L XV23. V y - (Y2 - Y1) L~1 • V12 + (Уз L"1x XV23, -1 '1 V2 - (Z2 - Zt) L V12 - Z2 • L'1 • V23 +35 + V13. Проекции Xi • X3, Yt « Y3 вследствие » перпендикулярности оси 13 плоскости XOY; Хз *=Y3, X2=Y2 вследствие того, что проекция оси 23 на плоскость XOY составляет с осями 40 ОХ и OY углы 45°, величина Zi = L. Если обозначить расстояние Хз - Хг = Уз - Уг величиной d, то соотношения для составляющих вектора скорости V x , Vy и Vz опреде45 ляются следующим образом: OY (Y 2 -Yi)/L (Y3-Y2)/L 0 OZ (Z 2 -Zi)/L (Z3~Z2)/L 1 Работа датчика осуществляется следующим образом. В режиме позиционных измерений прибор 4 устанавливают в фиксированной точке (например, устанавливается на якорной линим автономной буйковой станции, на заданных отрезках троса с борта судна или с океанографической платформы). Горизонтальный поток обтекает датчик скорости, причем в заданные моменты времени производятся излучения и приемы гидроакустических с и г н а л о в вдоль трасс между вершинами стоек 1-3. Может быть использована одна из многих известных схем гидроакустических измерителей скорости. В рабочем объеме датчика на пути горизонтального течения находятся три стойки 1-3, каждая из которых наклонена по отношению к горизонтальной оси течения. Выполненный выше анализ показал, что предложенная конструкция датчика обеспе1 1 чивает симметричные соотношения горизонтальных составляющих скорости 1 1 течения в системе координат прибора отноVz - (Z2 - L) L" V12 - Z2 I" V23.+ V13 сительно показаний датчика вдоль двух Из последнего соотношения следует, что показания по нормальной и продольной 50 трасс акустических сигналов (между точками 12 и 23, фиг. 1). Искажение потока за счет осям прибора при такой конструкции датчиобтекания стоек является минимальным, ка симметричны относительно показаний так как число стоек минимально (три) и все датчика по двум из трех осей, образующих они наклонены относительно горизонталькосоугольную систему координат. 1800368 ного течения (если, например, наклон стоек к горизонтальной плоскости равен 45°, гидродинамическое сопротивление каждой из них составляет 35 % от сопротивления нормального обтекания цилиндрической стой- 5 ки, которое используется в известных конструкциях). За счет этого обеспечивается повышение достоверности измерения составляющих горизонтального вектора скорости, 10 В режиме зондирования (вертикального или горизонтального) прибор движется в потоке со скоростью, направленной вдоль продольной оси OZ, причем эта скорость обычно превышает естественную скорость 15 течения, которая измеряется датчиком. Если результирующий вектор скорости (движения прибора и естественного течения) совпадает с приборной осью OZ, объем датчика является открытым, а сопротивление 20 торцевой части корпуса прибора 4 радикально уменьшается приданием ему гидродинамически обтекаемой формы. Стойки наклонены относительно вектора скорости, за счет чего их сопротивление относительно 25 невелико, а их число в рабочем объеме минимально (три), что в 2,33 раза меньше, чем в прототипе. При появлении нормальных по отношению к вектору скорости движения прибора 30 4 составляющих вектора скорости, вызванных естественным течением, результирующий вектор скорости может в общем случае произвольно ориентироваться относительно стоек. При этом возможна ситуация уве- 35 личения угла между результирующим вектором скорости и одной из стоек и возрастание ее гидродинамического сопротивления, причем соответствующие углы относительно двух других стоек будут 40 • 6 уменьшаться и их сопротивление будет падзть. Зз счет этого общий уровень возмущений потока в рабочем объеме датчика увеличиваться не будет при любом произвольном изменении угла между результирующим вектором скорости м продольной осью прибора OZ. В режиме зондирования, как и в позиционном режиме, обеспечиваются минимальные возмущения потока в рабочем объеме датчика и за счет этого повышается достоверность его показаний. Таким образом, конструкция акустического датчика скорости течения вносит минимальные возмущения в поле скорости в его рабочем обьеме за счет минимального числа стоек с пъезоакустическими преобразователями и их наклонного расположения по отношению к вектору скорости течения как в позиционном режиме использования датчика, так и в режиме зондирования. За счет этого обеспечивается повышение точности измерений скорости течения. Формула изобретения Акустический датчик скорости течения, содержащий корпус, на нижнем торце которого установлено три наклонных стойки, на каждой из которых установлено по одному излучателю пъезозкустических сигналов, три приемника акустических сигналов, о т л и ч а ю щ и й с я тем, что, с целью повышения точности измерения, наклонные стойки выполнены разной длины, излучатели и приемники акустических сигналов объединены в пары, при этом их излучающие и приемные поверхности совмещены в каждой паре под углом в 120°, причем пары излучатель-приемник расположены в плоскости, лежащей под углом в 45° по отношению к нормальной и поперечной осям корпуса прибора. 1800368 Фиг. 2. Редактор Составитель Т Горелая Техред М Моргентал Корректор Л.Филь Заказ 1161 Тираж Подписное ВНИИПИ Государственного комитета, по изобретениям и открытиям при ГКНТ СССР 113035. Москва Ж-35 Раушская маб , 4/5 Производственно-издательский комбинат "Патент", г. Ужгород, ул.Гагарина, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюAcoustic indicator of flow velocity
Автори англійськоюKushnir Volodymyr Moiseiovych
Назва патенту російськоюАкустический датчик скорости течения
Автори російськоюКушнир Владимир Моисеевич
МПК / Мітки
МПК: G01P 5/00
Мітки: течії, датчик, акустичний, швидкості
Код посилання
<a href="https://ua.patents.su/4-16826-akustichnijj-datchik-shvidkosti-techi.html" target="_blank" rel="follow" title="База патентів України">Акустичний датчик швидкості течії</a>
Акустичний вимірювач швидкості течії
Номер патенту: 14174
Опубліковано: 25.04.1997
Автори: Кушнір Володимир Мойсейович, Колтаков Юрій Миколайович
МПК: B81B 7/00
Мітки: швидкості, вимірювач, акустичний, течії
Формула / Реферат:
Акустический измеритель скорости течения, содержащий первый акустический преобразователь, выход которого соединен через первый приемник с первым входом второй схемы И, а через первый передатчик с выходом первой схемы ИЛИ, с входом первого счетчика и с С-входом первого D-триггера, выход которого подключен к второму входу третьей схемы И, первый вход которой соединен с вторым входом четвертой схемы И и с выходом генератора опорной частоты,...
Пристрій для виміру напряму і швидкості течії
Номер патенту: 14177
Опубліковано: 25.04.1997
Автори: Гайскій Віталій Олександрович, Кліменко Олександр Вікторович, Сафонов Георгій Олександрович
МПК: G01P 5/02
Мітки: виміру, пристрій, течії, швидкості, напряму
Формула / Реферат:
Устройство для измерения направления и скорости течения, содержащее установленную в неподвижной раме пропеллерную вертушку, в одной лопасти которой закреплен постоянный магнит, флюгарку, расположенную на одной оси с вертушкой и лежащую в одной плоскости с постоянным магнитом, четыре индукционных датчика, установленных на раме попарно в вертикальной и горизонтальной плоскостях симметрично оси вертушки, соединенных через коммутатор с...
Зондуючий комплекс профілю швидкості течії
Номер патенту: 14172
Опубліковано: 25.04.1997
Автори: Колтаков Юрій Миколайович, Кушнір Володимир Моісейович
МПК: G01P 5/00
Мітки: течії, профілю, швидкості, зондуючий, комплекс
Формула / Реферат:
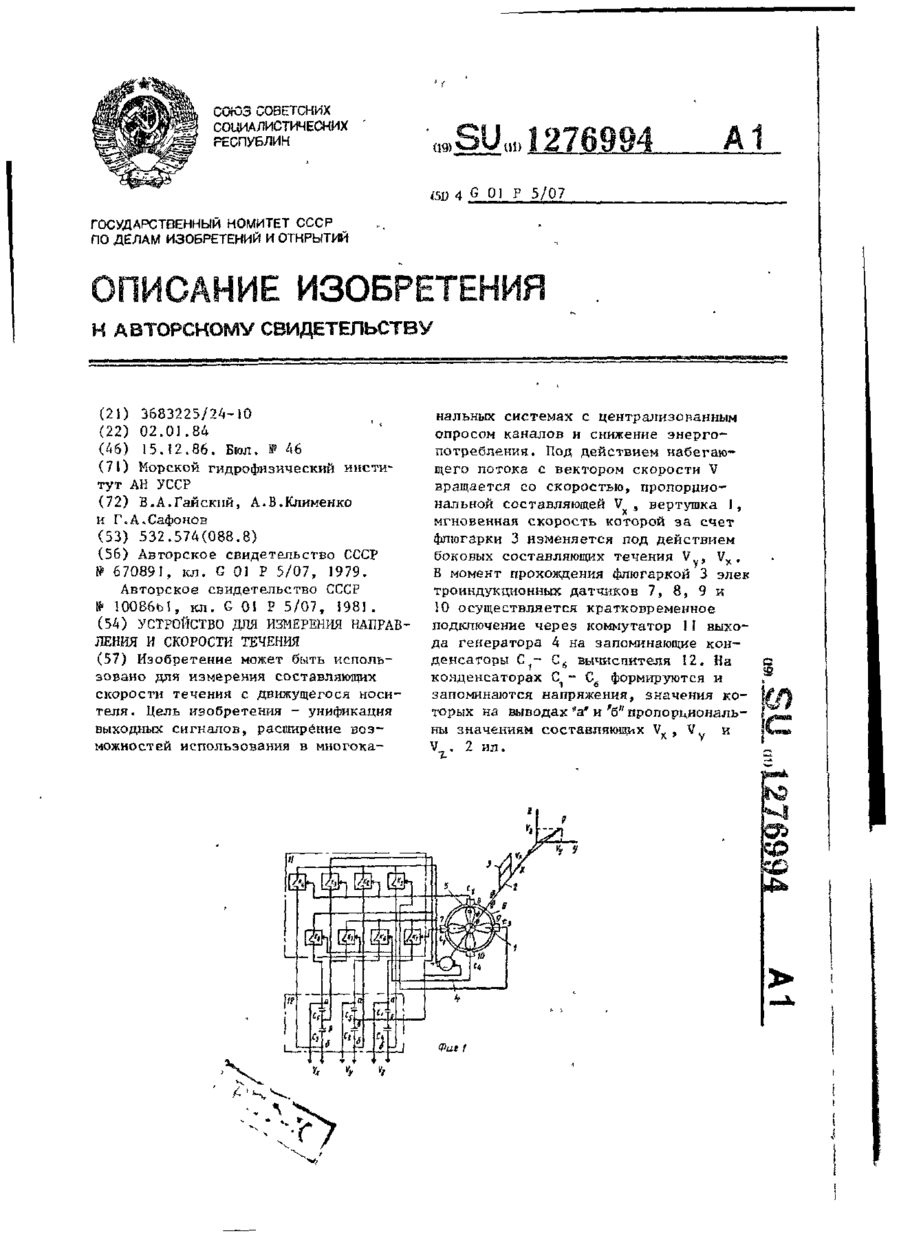
Зондирующий комплекс профиля скоростей течения, содержащий корпус, измеритель гидростатического давления, выход которого соединен с входом коммутатора каналов, два акустических измерителя скорости течения, измерительные базы которых ориентированы перпендикулярно продольной оси корпуса, а парные выходы соединены соответственно со входами коммутатора каналов измеритель угла азимута, подключенный к входу коммутатора, выход которого через...
Термоелектричний датчик швидкості потоку
Номер патенту: 1294
Опубліковано: 25.03.1994
Автори: Потапчук Галина Миколаївна, Чекурін Василь Феодосійович, Стельмах Олег Богданович, Варшава Славомир Степанович
МПК: G01P 5/10
Мітки: потоку, термоелектричний, датчик, швидкості
Формула / Реферат:
Термоэлектрический датчик скорости потока, содержащий терморезистор, включенный в измерительную схему, защитный экран и источник тока, отличающийся тем, что в него введены ограничительный резисторный вольтметр постоянного тока с параллельно подключенным к нему конденсатором, причем вольтметр постоянного тока последовательно соединен в ограничительным резистором и терморезистором, при этом защитный экран выполнен в виде цилиндрического...
Датчик кутової швидкості

Номер патенту: 17753
Опубліковано: 20.05.1997
Автори: Кухарчук Василь Васильович, Поджаренко Андрій Володимирович, Кулаков Павло Ігоревич, Поджаренко Володимир Олександрович, Гоменюк Анатолій Сергійович
МПК: G01P 3/42
Мітки: кутової, швидкості, датчик
Формула / Реферат:
Датчик угловой скорости, содержащий источник света, модулятор светового потока в виде диска, в котором выполнены прозрачные и непрозрачные элементы равной угловой ширины, линейный фотоприемник, диафрагму, установленную перед фотоприемником, отличающийся тем, что в него введен второй фотоприемник, сдвинутый относительно первого по отношению к центру модулятора на угол, который в полтора раза больше угловой ширины прозрачных и непрозрачных...
Попередній патент: Багатоканальна телевимірювальна система
Наступний патент: Спосіб виміру параметрів швидкості течії і пристрій для його виконання
Випадковий патент: Будівельний елемент чернишова