Спосіб виміру параметрів швидкості течії і пристрій для його виконання
Номер патенту: 16827
Опубліковано: 29.08.1997
Автори: Даниленко Михайло Якович, Холкін Володимир Васильович, Толстошеев Олексій Петрович
Формула / Реферат
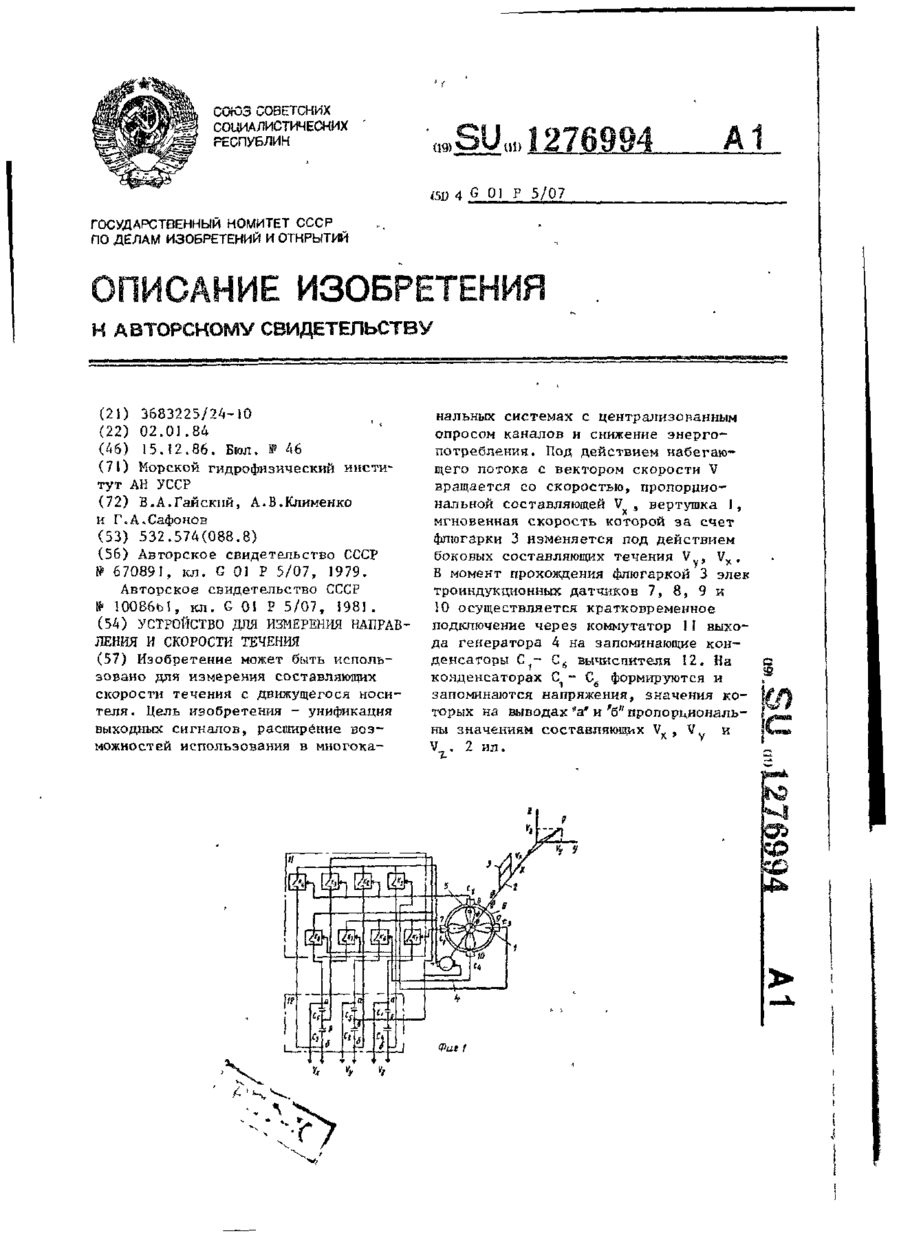
1. Способ измерения параметров скорости течения, заключающийся в приеме сигналов от вращающегося элемента, преобразовании этих сигналов в последовательность электрических импульсов и регистрации их очередности, отличающийся тем, что, с целью повышения точности измерения, вращающийся элемент последовательно облучают как минимум тремя акустическими импульсами, принимают отраженные акустические сигналы, при этом направление течения определяют путем сравнения длительности временных интервалов между каждым излученным и принятым сигналом, а скорость течения V определяют как
У=^-"•^
где ^ - количество импульсов за время <и;
1„ — длительность цикла измерения; п — количество лопастей вращающегося элемента. 2. Устройство для измерения параметров скорости течения, содержащее чувствительный элемент-импеллер, три формирователя, элемент И-НЕ, реверсивный счетчик, О-триггер, выход которого соединен с управляющим входом реверсивного счетчика, отличающееся тем, что, с целью повышения точности измерения, в него введены блок регистрации, выполненный в виде пьезоакустиче-ского преобразователя, акустическая ось которого перпендикулярна плоскостям лопастей чувствительного элемента, приемопередатчик, первый и второй выходы которого соединены с пьезоакусти-ческим преобразователем, а вход - с выходом первого формирователя и управляющим входом второго формирователя, а третий выход - с информационным входом второго формирователя, задающий генератор, второй и третий О-триггеры, дешифратор, три КЗ-триггера, второй элемент И-НЕ, при этом выход задающего генератора подключен к входам первого и третьего формирователей и первому входу первого элемента И-НЕ, второй вход которого соединен с выходом третьего формирователя, а прямой и инверсный выходы - со счетными входами второго и третьего О-триггеров соответственно, О-входы которых подключены к выходу второго формирователя, выходы второго и третьего О-триггеров соединены с первым и вторым входами дешифратора соответственно, первый выход дешифратора подключен к К-входам первого, второго и третьего КЗ-триггеров, второй, третий и четвертый выходы - к 8-вхо-дам первого, второго и третьего КЗ-триггеров, выходы которых подключены соответственно к первому, второму и третьему входам второго элемента И-НЕ, выход которого подсоединен к счетному входу реверсивного счетчика, О-вход первого О-триггера соединен с выходом второго КЗ-триггера, а С-вход - с четвертым выходом дешифратора.
Текст
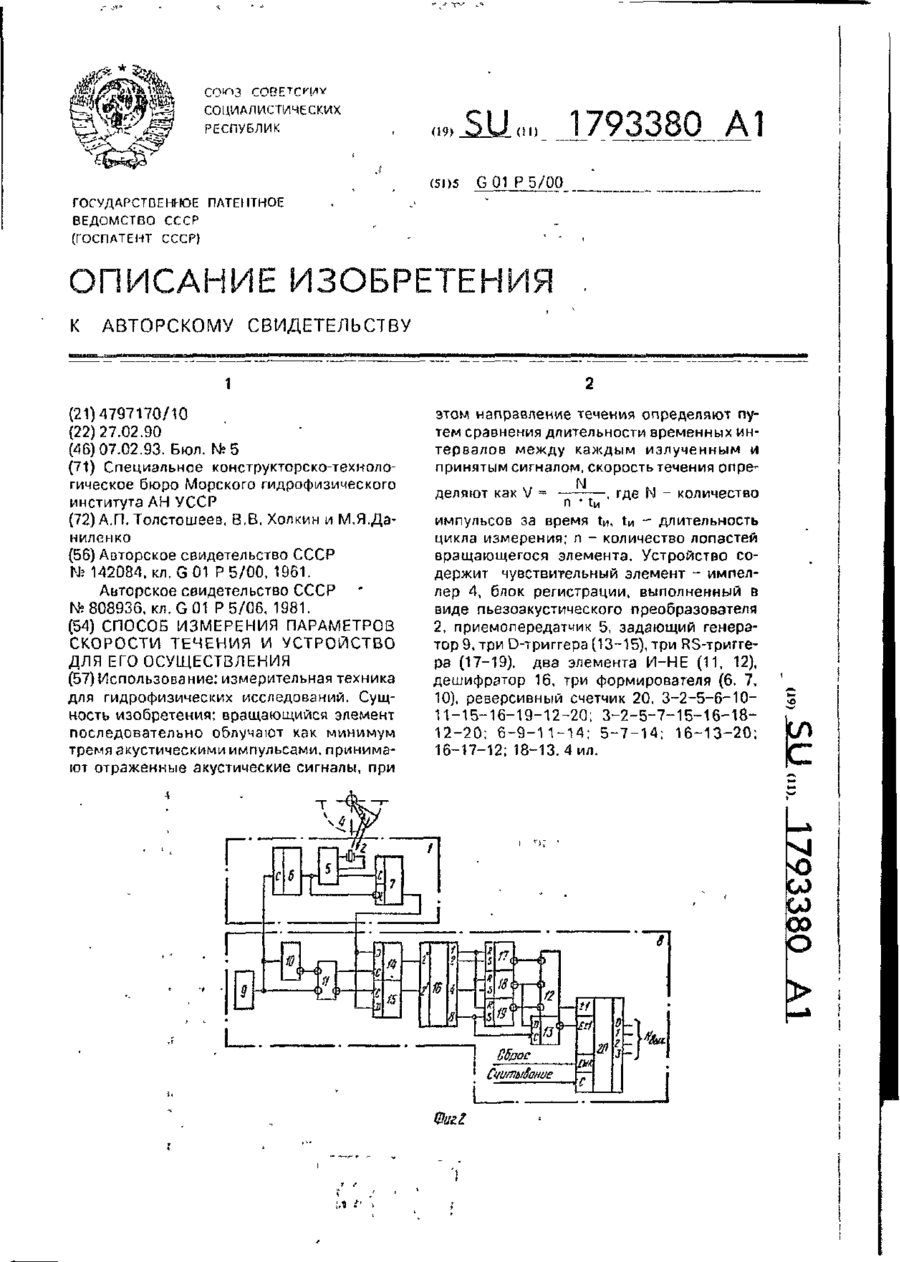
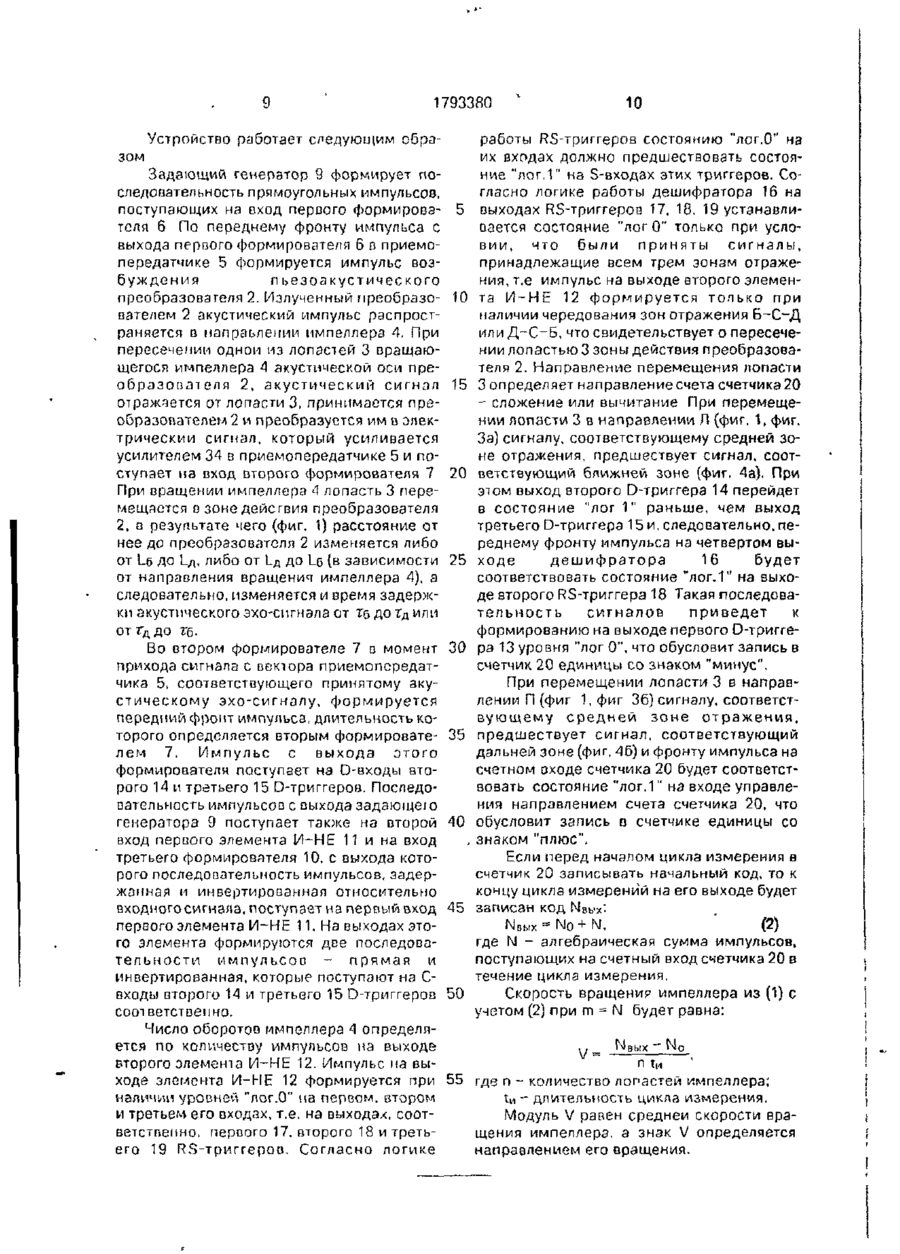
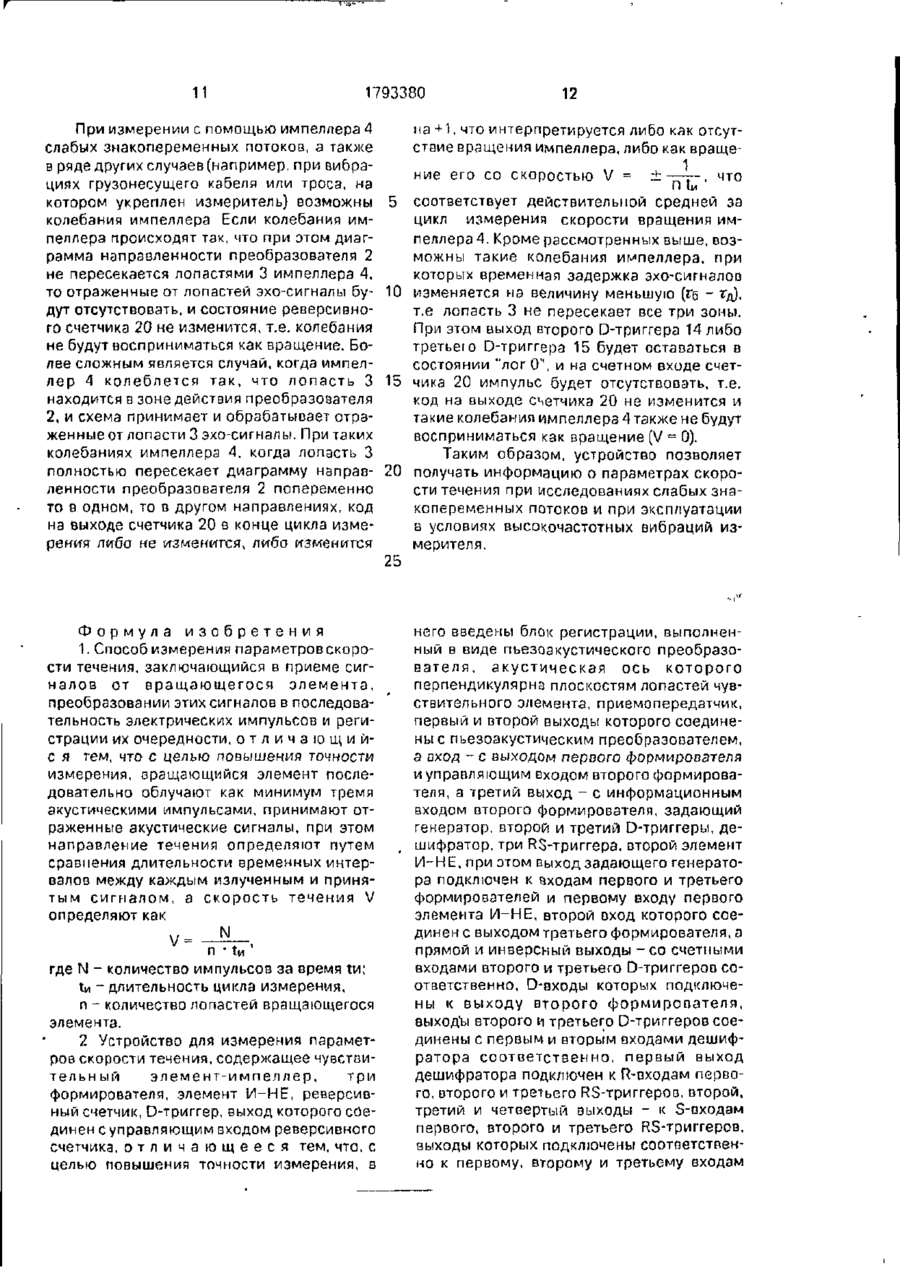
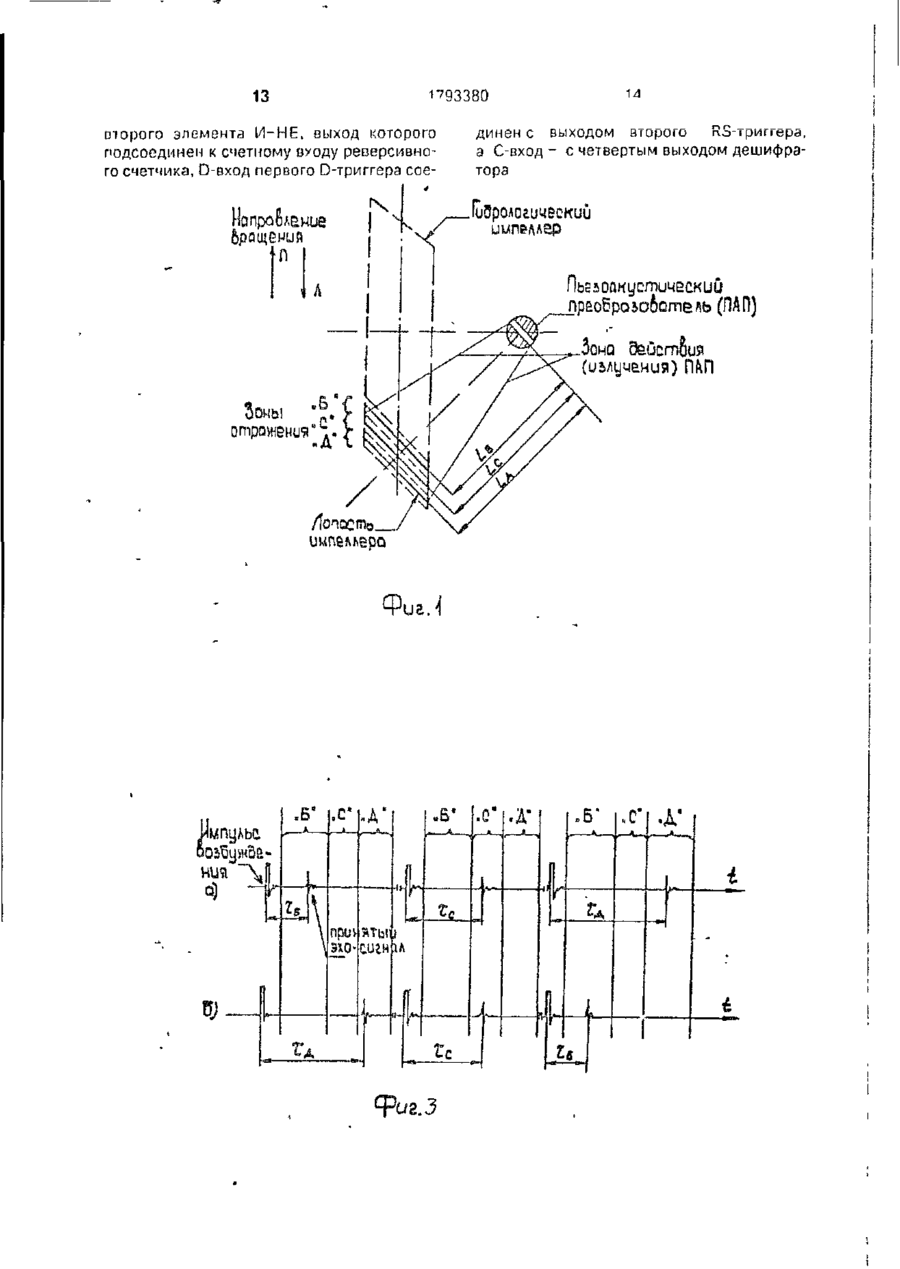
Использование: измерительная техника для гидрофизических исследований. Сущность изобретения: вращающийся элемент последовательно облучают как минимум тремя акустическими импульсами, принимают отраженные акустические сигналы, при этом направление течения определяют путем сравнения длительности временных интервалов между каждым излученным и принятым сигналом, скорость течения опреN деляют как V = где N - количество импульсов за время tM, t* - длительность цикла измерения; п - количество лопастей вращающегося элемента. Устройство содержит чувствительный элемент - импеллер 4, блок регистрации, выполненный в виде пьезоакустического преобразователя 2, приемопередатчик 5, задающий генератор 9, три D-триггера (13-15), три RS-триггера (17-19). два элемента И-НЕ (11, 12), дешифратор 16, три формирователя (6, 7, 10), реверсивный счетчик 20. 3-2-5-6-1011-15-16-19-12-20; 3-2-5-7-15-16-1812-20; 6-9-11-14; 5-7-14; 16-13-20; 16-17-12;18-13.4 ил. С/) 00 о 1793380 Изобретение относится к измерительной технике и может быть использовано для гидрофизических исследований. В настоящее время широкое распространение получили автономные цифровые измерители течения, в которых скорость и направление потока жидкости определяются путем измерения числа оборотов и направления сращения гидрологического импеллера, помещенною в поток жидкости. Известен способ измерения параметров скорости течения путем измерения скорости вращения гидрологического импеллера, реализованный в автономном приборе для записи температуры и течений в океане, заключающийся в том, что излучают световой СИГНРЛ, направленный на вращающийся диск импеллера, принимают световой сигнал, отраженный от зеркальной поверхности, сформированный на одном участке диска, и судят о скорости вращения по количеству отраженных световых сигналов, принятых фотоприемником. Этот способ позволяет повысить чувствительность при измерении скорости за счет уменьшения массы импеллера и, соответственно, постоянной времени. входом схемы ИЛИ и с R-входом дополнительного триггера, S-вход которого подключен к выходу второго формирователя и второму входу схемы ИЛИ, а выход - ко 5 второму входу дополнительной схемы И, первый вход которой соединен с третьим входом схемы ИЛИ и выходом третьего формирователя, а выход - с входом триггера индикации направления. R-вход которого Ю подключен к шине сброса, к второму входу схемы И, R-входам счетчика и выходу логической схемы однозначности, второй вход которой соединен с выходом триггера индикации направления, а первый вход подклю15 чен к выходу триггера младшего разряда счетчика, вход которого соединен с выходом схемы ИЛИ, четвертый вход которой подключен к выходу схемы И, первый вход которой соединен с шиной считывания. 20 Это устройство, как и способ, реализованный в нем, имеет недостаточную чувствительность и точность измерений, особенно при малых скоростях измеряемых турбулизированных токов, близких к порогу 25 трогания импеллера. Цель изобретения - снижение погрешности измерения в условиях знакопеременОднако получить при этом высокую точных скоростей, близких по величине к ность измерения параметров скорости не порогу трогания импеллера. удается, т.к. невозможно определить на- 30 Поставленная цель достигается тем, что правление вращения импеллера. Устройст-, в способе измерения параметров течения, во, в котором реализован данный способ заключающемся в приеме сигналов от враавтономный прибор для записи температущающегося элемента, преобразовании их в ры и течений в океане, выполненный в виде последовательность электрических импульцилиндра, внутри которого размещена ком- 35 сов и регистрации их очередности, вращаюпасная картушка, ртутный термометр, часощийся элемент последовательно облучают вой механизм, электробатареи, как минимум тремя акустическими импульосветительные лампы, фотоустройство, сами, принимает отраженные акустические электромагнитная муфта сцепления, содерсигналы, при этом направление течения опжит фотоэлектрический преобразователь с 40 ределяют путем сравнения длительности зеркальцем, укрепленным на диске рогора временных интервалов между каждым излуи фотосопрогивлением, установленный в ченным и принятым сигналом, а скорость корпусе прибора. течения V определяется как: N Это устройство обладает теми же недо\/v статками, что и способ, реализованный в 45 n • tM ' нем. где N - количество импульсов за прємя Т . и" В качестве прототипа устройства для tn - длительность цикла измерения; реализации способа выбрано устройство п - количество лопастей вращающегося для автоматического измерения скорости и элемента. направления сращения, содержащее дат- 50 Поставленная цель в устройстве для оечик числа оборотов и направления вращеализации способа достигается тем, что в ния, выполненный в виде магнитного устройство, содержащее чувствительный элемента, трех герконов, трех формироватеэлемент-импеллер, три формирователя, элелей и узла индикации скорости и направлемент И-НЕ, реверсивный счетчик, D-григния вращения, состоящего из схемы ИЛИ, 55 гер, выход которого соединен с схемы И, дополнительной схемы И. RS-тритуправляющим входом реверсивною счетчигерэ индикации направления, дополнителька, введены блок регистрации, выполненного RS-триггера. логической схемы ный в виде пьезоакустического однозначности и счетчика, причем выход преобразователя, акустическая ось которопервого формирователя соединен с первым 1793380 но возбуждающего импульса (фиг. 3), т.е. в зоне действия ПАП происходит модуляция времени распространения акустического сигнала, излученного ПАП, отраженного лопастью и принятого преобразователем, расстоянием между плоскостью лопасти и ПАП. При этом все возможные значения этого времени могут быть разделены на три группы: ближнего - Гб . среднего - г с и дальнего - Гд, которые соответствуют положениям лопасти в ближней, средней и дальней зонах отражения, обозначенных на фиг. 1 индексами Б,С, Д. При вращении импеллера перемещение каждой лопасти в зоне действия ПАП изменяет временную задержку эхосигналов либо от Гб до Гд (фиг. 2а) при вращении импеллера в одном направлении, условно показанном на фиг. 1 стрелкой с индексом Л, либо от г д до Гб (фиг. 26) при вращении в противоположном направлении (стрелка С с индексом П на фиг. 1). Перемещение импульса, соответствующего принятому эхо-сигналу, при направлении вращения Л схематично показано на фиг. За, а при направлении вращения П - на фиг. 36. Как следует из фиг. За и 36, принятые эхо-сигналы последовательно проходят три зоны. Для упрощения на фиг. 3 показано только по одному эхо-сигналу в каждой зоне. При направлении вращения Л чередование зон происходит в последовательности Б-С-Д. при направлении вращения П - в последовательности Б-С-Д. При этом количество таких чередований, зафиксированНа фиг. 1 схематически изображено пе- 35 ной за цикл измерения, будет ремещение лопасти импеллера относительсоответствовать количеству пересечений но точки отсчета, в которой расположен зоны действия ПАП, лопастями импеллера, пьезоакустический преобразователь; на и скорость вращения импеллера (об/с)опрефиг. 2 изображена структурная схема устделится по формуле: ройства для измерения параметров скоро- 4 0 V= -2!-. (1) сти течения; на фиг. 3 - временная ІЦ в диаграмма, иллюстрирующая установление где m - количество зафиксированных черепринадлежности принятых эхо-сигналов к дований; ближней, средней и дальней зонам отражеп - количество лопастей импеллера; ния; на фиг. 4 - временная диаграмма, ил- 45 Т - длительность цикла измерений, с. . И люстрирующая определение числа Направление перемещения лопасти, а оборотов и направление вращения импелследовательно, и направление вращения лера. импеллера однозначно определяется по тоСпособ реализуется следующим обраму, в какой последовательности средняя зозом. 50 на чередуется с какой-либо крайней. Из фиг. При вращении гидрологического импел3 следует, что при перемещении лопасти в лера каждая из его лопастей при перемещенаправлении Л (фиг. За) средняя зона раснии периодически попадает в зону действия полагается после ближней и перед дальней, (излучения) пьезоакустического преобразоа при перемещении в направлении П (фиг. вателя (ПАП). Перемещение лопасти в этой 55 36) - после дальней и перед ближней. Таким зоне схематично показано на фиг 1, В реобразом, чередование Б-С или С-Д однозультате такого перемещения изменяется значно свидетельствует о вращении импелрасстояние от ПАП до плоскости лопасти, а лера в направлении Л, а чередование С-Б следовательно, и изменяется время задерили Д~С - о вращении в направлении П. жки принятого ПАП эхо-сигнала относительго перпендикулярна плоскостям лопастей чувствительного элемента, приемопередатчик, первый и второй выходы которого соединены с пьезоакустическим преобразователем, а вход - с выходом пер- 5 вого формирователя и управляющим входом второго формирователя, а третий выход - с информационным входом второго формирователя, задающий генератор, второй и третий D-триггеры, дешифратор, три 10 RS-триггерэ, второй элемент И-НЕ, при этом выход задающего генератора подключен к входам первого и третьего формирователей и первому входу первого элемента И-НЕ. второй вход которого соединен с вы- 15 ходом третьего формирователя, а прямой и •инверсный выходы - со счетными входами второго и третьего D-триггеров соответственно, D-входы которых подключены к выходу второго формирователя, выходы второго и третьего D-триггеров соединены 20 с первым и вторым входами дешифратора соответственно, первый вход дешифратора подключен к R-входам первого, второго и третьего RS-триггеров, второй, третий и четвертый выходы - к S-входам первого, второ- 25 го и третьего RS-триггеров, выходы которых подключены соответственно к первому, второму и третьему входам второго элемента И-НЕ, выход которого подсоединен к счетному входу реверсивного счетчика, D-вход 30 первого D-триггера соединен с выходом второго RS-триггера, а С-вход-с четвертым выходом дешифратора. 1793380 В способе каждая единица информации о вращении импеллера сопровождается информацией о направлении перемещения попасти в момент, непосредственно предшествовавший полученной единице информации. Таким образом, каждая единица информации, полученная предлагаемым способом, представляет собой единичный вектор: модуль вектора свидетельствует о пересечении лопастью импеллера точки отсчета (акустического луча ПАП), з направление вектора - о направлении, в котором перемещалась лопасть относительно этой точки. Результат суммирования векторов за время измерения содержит информацию о средних значениях скорости и направлении вращения импеллера. При работе в условиях слабых знакопеременных потоков лопасть импеллера в течение цикла измерения может совершать колебания относительно точки отсчета. При этом возможны следующие случаи колебания импеллера: 1. Лопасти импеллера не пересекают акустического луча ПАП; 2. Лопасть импеллера пересекает акустический луч ПАП так, что отраженные эхосигналы принадлежат одной или двум зонам; 3. Лопасть импеллера полностью пересекает акустический луч ПАП попеременно в противоположных направлениях. В первом случае эхо-сигналы будут отсутствовать, и информация, полученная за время измерения, будет свидетельствовать об отсутствии вращения импеллера. Во втором случае, поскольку нет чередований всех трех зон (Б-С-Д или Б-С-Б), модуль вектора скорости будет равен нулю, что также свидетельствует об отсутствии вращения. В третьем случае пересечением лопастью акустического луча будут соответствовать единичные векторы попеременно противоположных направлений, сумма которых за время измерения будет равна либо нулю (при четном количестве колебаний), либо +1 (при нечетном количестве колебаний лопасти). 5 10 15 20 25 30 35 40 45 50 Устройство для измерения скорости и направления вращения гидрологического импеллера, реализующее предлагаемый способ измерения, содержит (фиг. 2} датчик .скорости и направления вращения, состоя- 55 щий из пьезоакустического преобразователя 2, акустическая ось которого перпендикулярна плоскости лопастей 3 импеллера 4, приемопередатчика 5, первого 6 8 и второго 7 формирователей и узел обработки сигналов 8, состоящий из задающего генератора 9- третьего формирователя 10, первого 11 и второго 12 элементов И-НЕ. первого 13, второго 14 и третьего 15 D-триггеров, дешифратора 16. первого 17, второго 18 и третьего 19 RS-триггеров и реверсивного счетчика 20. Выход задающего генератора 9 подключен к входу первого формирователя 6, выход которого соединен с управляющим входом второго формирователя 7 и входом приемопередатчика 5, между первым и вторым выходами которого подключен пьезоакустический преобразователь 2, акустически связанный с лопастями 3 импеллера 4, а третий выход приемопередатчика 5 подключен к информационному входу второго формирователя 7, выход которого соединен с D-входом второго 14 и третьего 15 D-триггероо. С-входы которых соединены с прямым и инверсным выходами первого элемента И-НЕ 11, соответственно, второй вход которого подключен к выходу третьего формирователя 10, вход которого и первый вход первого элемента И-НЕ 11 соединены с выходом задающего генератора 9. Выходы второго 13 и третьего 15 D-триггеров соединены соответственно с первым и вторым входами дешифратора 16, первый выход которого соединен с R-входами первого 17, второго 18 и третьего 19 RS-триггеров. а второй, третий и четвертый выходы подключены соответственно к S-пходам первого 17, второго 18 и третьего 19 RS-триггеров, Первый, второй и третий входы второго VI элемента И-НЕ соединены, соответственно, с выходами первого 17, второго 18 и третьего 19 RS-триггероа, а выход второго 12 элемента И-НЕ подключен к счетному входу реверсивного счетчика 20, управляющий вход (вход управления паправлением счета), которою соединен с выходом первого D-триггора 13, D-ізход которого подключен к выходу второго RSтриггсра 18, С-вход - к четвертому выходу дешифратора 16, а пходы установки пуля и тактовый реверсивного счетчика 20 подключены, соответственно, к шинам "сброс" и "считывание". Выходы реверсивного счетчика 20 являются выходами устройства. Лопасти 3 импеллера 4 должны быть выполнены из материала, удовлетворяющего условиям: рм См > /За' Св. где ри, рп - плотиосгь материала лопастей 3 и воды соответственно; См, Св ~ скорости звука а материале лопастей 3 и воде соответственно. 1793380 зом Устройство работает следующим обра Задающий генератор 9 формирует последовательность прямоугольных импульсов, поступающих на вход первого формировэ- 5 толп 6 По переднему фронту импульса с выхода первого формирователя 6 о приемопередатчике 5 формируется импульс возбуждения пьезоакустичес кого преобразователя 2. Излученный преобразо- 10 вателем 2 акустический импульс распространяется в направлении импеллера 4. При пересечении одной из лопастей 3 вращающегося импеллера 4 акустической оси преобразователя 2, акустический сигнал 15 отражается от лопасти 3, принимается преобразопатеяем 2 и преобразуется им в электрический сигнал, который усиливается усилителем 34 в приемопередатчике 5 и поступает на вход второго формирователя 7 20 При вращении импеллера 4 лопасть 3 перемещается в зоне действия преобразователя 2, о результате чего (фиг. 1) расстояние от нее до преобразователя 2 изменяется либо от L6 до 1_д, либо от Lq до 1G {в зависимости 25 _ от направления вращения импеллера 4), а следовательно, изменяется и время задержки акустического эхо-сигнала от Тб до г д или от г д до Тб. Во втором формирователе 7 о момент 30 прихода сигнала с векюра приемопередатчика 5, соответствующего принятому акустическому эхо-сигналу, формируется передний фронт импульса, длительность которого определяется вторым формировате- 35 лем 7. Импульс с выхода отого формирователя поступает на О-входы второго 14 и третьего 15 D-триггеров. Последовательность импульсов с выхода задающею генератора 9 поступает также на второй 40 вход первого элемента И-НЕ 11 и на вход третьего формирователя 10, с выхода которого последовательность импульсов, задержанная и инвертированная относительно входногосигнэла, поступает на первый вход 45 первого элемента И-НЕ 11. На выходах этого элемента формируются две последовательности и м п у л ь с о о - прямая и инвертированная, которые поступают нз Свходы второго 14 и третьего 15 D-триггеров 50 соответственно. 10 работы RS-триггеров состоянию "лог.0" на их входах должно предшествовать состояние "лог.1" на S-входэх этих триггеров. Согласно логике работы дешифратора 16 на выходах RS-триггеров 17, 18, 19 устанавливается состояние "лог 0" только при условии, что были приняты сигналы, принадлежащие всем трем зонам отражения, т.е импульс на выходе второго элемента И-НЕ 12 формируется только при наличии чередования зон отражения Б-С-Д или Д-С-Б, что свидетельствует о пересечении лопастью 3 зоны действия преобразователя 2. Направление перемещения лопасти 3 определяет направление счета счетчика 20 - сложение или вычитание При перемещении лопасти 3 в направлении Л (фиг. 1, фиг. За) сигналу, соответствующему средней зоне отражения, предшествует сигнал, соответствующий ближней зоне (фиг. 4а). При этом выход второго D-триггера 14 перейдет в состояние "лог 1" раньше, чем выход третьего D-триггера 15 и, следовательно, переднему фронту импульса на четвертом выходе дешифратора 16 будет соответствовать состояние "лог.1" на выходе второго RS-триггера 18 Такая последовательность сигналов приведет к формированию на выходе первого D-триггера 13 уровня "лог 0", что обусловит запись в счетчик 20 единицы со знаком "минус". При перемещении лопасти 3 в направлении П (фиг 1,фиг 36) сигналу, соответствующему средней зоне отражения, предшествует сигнал, соответствующий дальней зоне (фиг. 46) и фронту импульса на счетном сходе счетчика 20 будет соответствовать состояние "лог.1" на входе управления направлением счета счетчика 20, что обусловит запись в счетчике единицы со знаком "плюс". Если перед началом цикла измерения в счетчик 20 записывать начальный код, то к концу цикла измерений на его выходе будет записан код Ыъы%: NBbrx = No + N, (2) где N - алгебраическая сумма импульсов, поступающих нз счетный вход счетчика 20 в течение цикла измерения. Скорость вращенир импеллера из (1) с учетом (2) при m = N будет равна: Число оборотов импеллера 4 определяется по количеству импульсов на выходе второго элемента І/1-НЕ 12. Импульс на выходе элемента И-НЕ 12 формируется при 55 где п - количество лопастей импеллера; наличии уровней "лог.0" па первом, втором ivt -~ длительность цикла измерения. и третьем его входах, т.е. на выходах, соотМодуль V равен средней скорости враветственно, первого 17. второго 18 и третьщения импеллера, а знак V определяется его 19 RS-триггероо. Согласно логике направлением его вращения. 11 1793380 При измерении с помощью импеллера 4 слабых знакопеременных потоков, а также в ряде других случаев (например, при вибрациях грузонесущего кабеля или троса, на котором укреплен измеритель} возможны колебания импеллера Если колебания импеллера происходят так, что при этом диаграмма направленности преобразователя 2 не пересекается лопастями 3 импеллера 4, то отраженные от лопастей эхо-сигналы будут отсутствовать, и состояние реверсивного счетчика 20 не изменится, т.е. колебания не будут восприниматься как вращение. Более сложным является случай, когда импеллер 4 колеблется так, что лопасть 3 находится в зоне действия преобразователя 2, и схема принимает и обрабатывает отраженные от лопасти 3 эхо-сигналы. При таких колебаниях импеллера 4, когда лопасть 3 полностью пересекает диаграмму направленности преобразователя 2 попеременно то в одном, то в другом направлениях, код на выходе счетчика 20 в конце цикла измерения либо не изменится, либо изменится на +1, что интерпретируется либо как отсутствие вращения импеллера, либо как враще1 ние его со скоростью V = ± — г - , что 5 П ' Ти ' где N - количество импульсов за время т.и; ти - длительность цикла измерения, . п - количество лопастей вращающегося элемента. 2 Устройство ДЛИ измерения параметров скорости течения, содержащее чувстоительный элемент-импеллер, три формирователя, элемент И-НЕ, реверсивный счетчик, D-триггер, выход которого соединен с управляющим входом реверсивного счетчика, о т л и ч а ю щ е е с я тем, что, с целью повышения точности измерения, в П Т_ц соответствует действительной средней за цикл измерения скорости вращения импеллера 4. Кроме рассмотренных выше, возможны такие колебания импеллера, при которых временная задержка эхо-сигналов 10 изменяется на величину меньшую (Гб - Гд), т.е лопасть 3 не пересекает все три зоны. При этом выход второго D-триггера 14 либо третьего D-триггера 15 будет оставаться в состоянии "лог 0", и на счетном входе счет15 чика 20 импульс будет отсутствовать, т.е. код на выходе сметчика 20 не изменится и такие колебания импеллера 4 также не будут восприниматься как вращение (V = 0). Таким образом, устройство позволяет 20 получать информацию о параметрах скорости течения при исследованиях слабых знакопеременных потоков и при эксплуатации в условиях высокочастотных вибраций измерителя. 25 Формула изобретения 1. Способ измерения параметровскорости течения, заключающийся в приеме сигналов от вращающегося элемента, преобразовании этих сигналов в последовательность электрических импульсов и регистрации их очередности, о т л и ч а ю щ и й с я тем, что с целью повышения точности измерения, вращающийся элемент последовательно облучают как минимум тремя акустическими импульсами, принимают отраженные акустические сигналы, при этом направление течения определяют путем сравнения длительности временных интервалов между каждым излученным и принятым сигналом, а скорость течения V определяют как V 12 него введены блок регистрации, выполненный в виде пьезоакустического преобразователя, акустическая ось которого перпендикулярна плоскостям лопастей чувствительного элемента, приемопередатчик, первый и второй выходы которого соединены с пьезоакустическим преобразователем, а оход - с выходом первого формирователя и управляющим входом второго формирователя, а третий выход - с информационным входом второго формирователя, задающий генератор, второй и третий D-триггеры, дешифратор, три RS-триггера, второй элемент И-НЕ, при этом выход задающего генератора подключен к йходам первого и третьего формирователей и первому входу первого элемента И-НЕ, второй вход которого соединен с выходом третьего формирователя, а прямой и инверсный выходы - со счетными входами второго и третьего D-триггеров соответственно, D-входы которых подключены к выходу второго формирователя, выходы второго и третьего D-триггеров соединены с первым и вторым входами дешифратора соответственно, первый выход дешифратора подключен к R-пходам первого, второго и третьего RS-триггеров, второй, третий и четвертый выходы - к S-входам первого, второго и третьего RS-триггеров, выходы которых подключены соответственно к первому, второму и третьему входам 13 14 оіорого элемента И-НЕ. выход которого подсоединен к счетному входу реверсивного счетчика, D-вход первого D-триггера сое динен с выходом второго г\о-триггера, а С-вход - с четвертым выходом дешифратора аэрологический праоБроьоботвль (ПАП) Зона (иьлуч&ния) ПАП •о" .К -А" cipuv йтыи 510- сигн и Б' т. -А и Фс/г.3 -С 1793380 Б ЄА Б,С А ІЗ С А Д Ш Ш Д Л н у-Р П П ДСБ Редактор Б. Федотов АСБ С6 Составитель И. Кочуровэ Техред М Моргентал Корректор 3. Сзлко Заказ 502 Тираж . Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж 35, Раушская наб., 4/5 Производственно-издательский комбинат "Патент", г. Ужгород, ул.Гагарина, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measurement of parameters of flow velocity and appliance for its implementation
Автори англійськоюTolstosheiev Oleksii Petrovych, Kholkin Volodymyr Vasyliovych, Danylenko Mykhailo Yakovych
Назва патенту російськоюСпособ измерения параметров скорости течения и устройство для его исполнения
Автори російськоюТолстошеев Алексей Петрович, Холкин Владимир Васильевич, Даниленко Михаил Яковлевич
МПК / Мітки
МПК: G01P 5/00
Мітки: течії, параметрів, пристрій, спосіб, виміру, виконання, швидкості
Код посилання
<a href="https://ua.patents.su/8-16827-sposib-vimiru-parametriv-shvidkosti-techi-i-pristrijj-dlya-jjogo-vikonannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб виміру параметрів швидкості течії і пристрій для його виконання</a>
Пристрій для виміру напряму і швидкості течії
Номер патенту: 14177
Опубліковано: 25.04.1997
Автори: Кліменко Олександр Вікторович, Гайскій Віталій Олександрович, Сафонов Георгій Олександрович
МПК: G01P 5/02
Мітки: виміру, пристрій, швидкості, течії, напряму
Формула / Реферат:
Устройство для измерения направления и скорости течения, содержащее установленную в неподвижной раме пропеллерную вертушку, в одной лопасти которой закреплен постоянный магнит, флюгарку, расположенную на одной оси с вертушкой и лежащую в одной плоскости с постоянным магнитом, четыре индукционных датчика, установленных на раме попарно в вертикальной и горизонтальной плоскостях симметрично оси вертушки, соединенных через коммутатор с...
Сигналізатор граничної швидкості обертання валу
Номер патенту: 1333
Опубліковано: 25.03.1994
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: G01P 3/42
Мітки: валу, граничної, сигналізатор, швидкості, обертання
Формула / Реферат:
Сигнализатор предельной скорости вращения вала, содержащий первый формирователь импульсов, сигнализатор, коммутатор, переключатель, генератор тактовых импульсов, программный блок, первый и второй счетчики импульсов, формирователь запрещающего сигнала, второй формирователь, первый триггер, второй триггер и первый и второй элементы И, причем вход первого формирователя импульсов соединен с входом устройства, а выход — с входом сигнализатора...
Спосіб виміру швидкості звуку і пристрій для його виконання
Номер патенту: 14170
Опубліковано: 25.04.1997
Автори: Бабій Маргарита Василівна, Бабій Владлен Іванович
МПК: G01F 1/66, G01N 29/07, G01H 5/00, G01H 9/00
Мітки: спосіб, звуку, швидкості, пристрій, виконання, виміру
Формула / Реферат:
1. Способ измерения скорости звука, заключающийся в том, что излучают акустические импульсы в исследуемую среду и регистрируют время прохождения ими заданного расстояния, по которому определяют скорость звука, отличающийся тем, что, с целью повышения точности, регистрацию времени прохождения акустических импульсов осуществляют по моментам изменения фазы световой волны сфокусированного когерентного излучения, перпендикулярного направлению...
Акустичний вимірювач швидкості течії
Номер патенту: 14174
Опубліковано: 25.04.1997
Автори: Колтаков Юрій Миколайович, Кушнір Володимир Мойсейович
МПК: B81B 7/00
Мітки: акустичний, вимірювач, швидкості, течії
Формула / Реферат:
Акустический измеритель скорости течения, содержащий первый акустический преобразователь, выход которого соединен через первый приемник с первым входом второй схемы И, а через первый передатчик с выходом первой схемы ИЛИ, с входом первого счетчика и с С-входом первого D-триггера, выход которого подключен к второму входу третьей схемы И, первый вход которой соединен с вторым входом четвертой схемы И и с выходом генератора опорной частоты,...
Багатоканальний сигнатурний аналізатор

Номер патенту: 6922
Опубліковано: 31.03.1995
Автори: Дяченко Олег Миколайович, Журавель Олександр Павлович
МПК: G06F 11/00
Мітки: аналізатор, багатоканальний, сигнатурний
Текст:
...о е д и н е н с п р я м ы м выходом последнего разряда первого счетчика, инверсный выход последнего разряда которого соединен со вторым входом элемента ИЛИ и с тактовым входом первого триггера, инверсный выход которого соединен с первым выходом третьего элемента И, второй вход которого соединен с выходом элемента ИЛИ, выход третьего элемента И соединен с тактовым входом второго триггера, вторым входом первого элемента И и входом элемента...
Попередній патент: Акустичний датчик швидкості течії
Наступний патент: Піноутворююча сполука для вилучення рідини з забою свердловини
Випадковий патент: Штам м-25 рrоріоnовастеrіuм sнеrмаnіі імв в-7002 продуцент вітаміну в-12