Автоматичний регулятор непрямої дії
Формула / Реферат
1. Автоматический регулятор непрямого действия, содержащий измеритель отклонения регулируемого параметра, связанный через муфту с осью качения рычага обратной связи с возможностью её вертикального перемещения, причём один конец этого рычага связан со штоком поршня гидродемпфера и с пружиной, а другой конец - с отсечным золотником, при этом цилиндр гидродемпфера установлен с возможностью вертикального перемещения и жестко соединен со штоком поршня сервомотора, кинематически связанного с регулирующим органом, а надпоршневая и подпоршневая полости цилиндра сервомртора гидравлически связаны через отсечной золотник с гидронасосом, отличающийся тем, что поршень гидродемпфера связан с корректирующей инерционной массой и снабжен обеспечивающей его Нулевую плавучесть в рабочей жидкости цилиндра гидродемпфера герметичной полостью.
2. Автоматический регулятор непрямого действия по п. 1, отличающийся тем, что шток поршня гидродемпфера снабжен продольной облегченной зубчатой рейкой, а корректирующая инерционная масса образована связанным с этой рейкой цилиндрическим зубчатым колесом, ось которого установлена на кронштейне, закрепленном на неподвижной опоре.
Текст
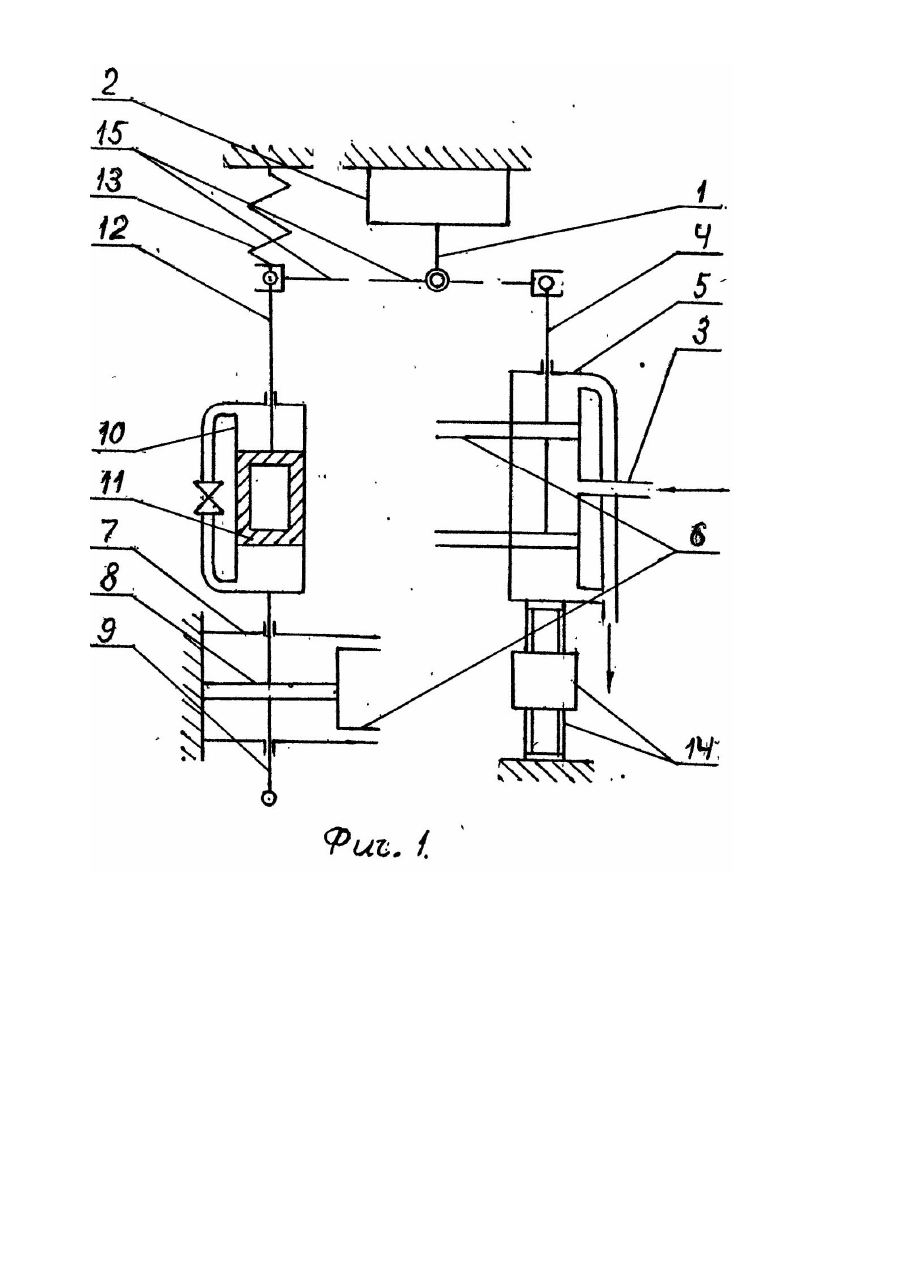
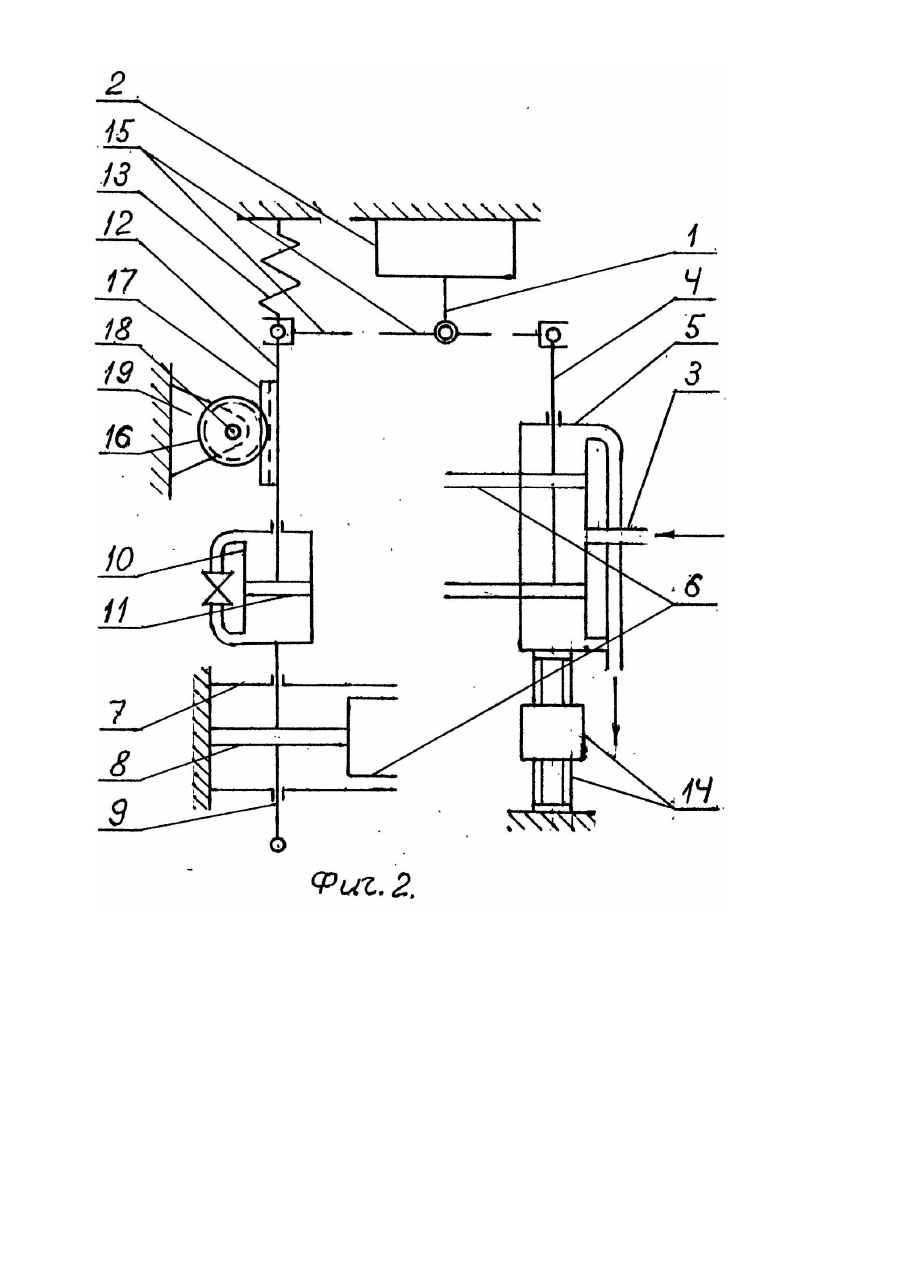
Изобретение относится к области систем автоматического регулирования различных параметров, а более конкретно - к их автоматическим регуляторам непрямого действия, снабженных изодромным устройством. Известен автоматический регулятор для регулирования расхода газа [1], в котором автоматическое регулирование по отклоненнию регу лируемого параметра и по интегра лу от отмеченного отклонения нередко не удовлетворяет требованиям, предъявляемым к показателем качества работы системы автоматического регулирования, что является весьма нежелательным. Наиболее близким по технической сущности к заявленному является обладающий регулирующими импульсами по отклонению регулируемого параметра и по интегралу от этого отклонение автоматический регулятор непрямого действия [2]. Известный автоматический регулятор имеет измеритель отклонения регулируемого параметра, который связан через муфту с осью качения рычага обратной связи с возможностью ее вертикального перемещения. Один конец этого рычага связан со штоком поршня гидродемпфера и с пружиной, а другой конец - с отсечным золотником. При этом цилиндр гидродемпфера установлен с возможностью вертикального перемещения и жестко соединен со штоком поршня сервомотора (кинематически связанного с регулирующим органом). Надпоршневая и подпоршневая полости цилиндра сервомотора гидравлически связаны через отсечной золотник с гидронасосом. Существенной особенностью рассматриваемого автоматического регулятора является то, что масса поршня и штока гидродемпфера весьма незначительна и поэтому практически не оказывает влияния на процесс автоматического регулирования. Следовательно, дифференциальное уравнение динамики гидродемпфера с пружиной в качестве гибкой обратной связи, определяющей свойства автоматического регулятора непрямого действия здесь представляется выражением: где Toe - постоянная времени гидродемпфера с пружиной, значение которой пропорци-онально величине гидравлического сопротивления; U и у - относительные перемещения соответственно штока демпфера и штока сервомотора; Кос ~ коэффициент усиления гидродемпфера. Несмотря на то, что конструкция известного автоматического регулятора в настоящее время доведена до высокого совершенства, нередко встречаются системы автоматического регулирования с таким регулятором, качество работы которых (в отношении точности регулирования) нуждается в существенном повышении. Задачей настоящего изобретения является усовершенствование конструкции автоматического регулятора непрямого действия, обеспечивающее повышение точности автоматического регулирования путем уменьшения колебаний регулируемого параметра и ускорения переходных процессов. В первом варианте изобретения решение поставленной задачи состоит в том, что поршень гидродемпфера связан с корректирующей инерционной массой и снабжен обеспечивающей его нулевую плавучесть в рабочей жидкости цилиндра гидродемпфера герметичной полостью. Во втором варианте изобретения решение задачи состоит в том. что шток поршня гидродемпфера снабжен продольной облегченной зубчатой рейкой, а корректирующая инерционная масса образована связанным с этой рейкой цилиндрическим зубчатым колесом, ось которого установлена на кронштейне, закрепленном на неподвижной опоре. Исходя из изложенного и положений теоретической механики, в обоих вариантах влияние силы тяжести корректирующей инерционной массы на процесс автоматического регулирования исключено. При этом динамика гидродемпфера с пружиной в отличие от выражения (1) описывается диффе-оенииальным УПЯЯНЙНИРМ" где Ти - постоянная времени в связи с использованием отмеченной корректирующей инерционной массы. Согласно уравнению (2) следует, что при использовании корректирующей инерционной массы автоматический регулятор непрямого действия приобретает дополнительный третий регулирующий импульс - по производной первого порядка от отклонения регулируемого параметра, который, как известно, при переходных процессах весьма эффективно гасит колебания регулируемого параметра и убыстряет переходный процесс. На фиг. 1 представлен первый вариант принципиальной конструктивной схемы предлагаемого автоматического регулятора непрямого действия. Последний содержит имеющую возможность вертикального перемещения муфту 1 измерителя 2 отклонений регулируемого параметра, связанное трубопроводом 3 с питаемым гидронасосом снабженное отсечным золотником 4 и втулкой 5 с вертикальными продольными осями управляющее потоками рабочей жидкости устройство, связанный трубопроводами Б с управляющим устройством сервомотор, цилиндр 7 которого, имея вертикальную продольную ось, жестко связан с неподвижной 'опорой, а поршень 8, разделяя цилиндр на надпоршневую и подпоршневую полости, жестко связан со штоком 9, нижний конец которого кинематически связан с регулирующим органом, а верхний конец жестко связан с цилиндром 10 гидродемпфера. Поршень 11 гидродемпфера связан с корректирующей инерционной массой и снабжен обеспечивающей его нулевую плавучесть в рабочей жидкости цилиндра герметичной полости. Шток 12 гидродемп-фера нижним концом жестко и соосно связан с имеющим герметичную полость поршнем, а верхним концом через пружину 13 связан с неподвижной опорой. Настройка автоматического регулятора осуществляет* ся гаечно-винтовым механизмом 14, связывающим втулку 5 с опорой. Как и в известном автоматическом регуляторе, рычаг обратной связи 15 через ось качения связан с муфтой 1 измерителя 2. При этом один конец этого рычага кинематически связан со штоком поршня гидродемпфера и с пружиной 13. а другой конец -с отсечным золотником. На фиг. 2 представлен второй вариант принципиальной конструктивной схемы предлагаемого автоматического регулятора. Отличительной особенностью этой схемы есть то, что здесь в качестве корректирующей инерционной массы используется цилиндрическое зубчатое колесо 16, которое находится в зацеплении со связанной со штоком 12 продольной Облегченной зубчатой рейкой 17. При этом ось вращения 18 этого колеса установлена на кронштейне 19, закрепленном на неподвижной опоре. В обеих конструктивных схемах сила тяжести используемой корректирующей инерционной массы не воздействует на пружину 13. Поэтому последняя при автоматическом регулировании в отличие от прототипа под* вергаєте» главным образом двум благоприятным силовым воздействиям - в связи с гидравлическим сопротивлением гидродемпфера и в связи с инерционностью корректирующей инерционной массы (поршня 11 на фиг. 1 и з убчатого колеса 16 на фиг. 2). Автоматический регулятор работает следующим образом. В случае установившегося значения регулируемого параметра на заданном гаечно-винтовым механизмом 14 режиме кинематически связанные между собой рычагом обратной связи 15 золотник 4, муфта 1 измерителя 2, шток 12 и поршень 11 всегда находятся в одном положении. При этом пружина 13 не нагружена, а золотник 4 находится в равновесном положении относительно втулки 5. Положение же цилиндра 10 гидродемпфера, поршня 8 и связанного со штоком 9 регулирующего органа определяется значением нагрузки регулируемого объекта. При переходных процессах автоматический регулятор (фиг. 1 и 2) работает как совокупность одновременно работающих регуляторов непрямого действия: а) общеизвестного основного пропорционально-интегрального регулятора; б) дополнительного дифференциального регулятора, воспринимающим элементом которого является корректирующая инерционная масса, а выходом - дополнительное перемещение связанного со штоком 9 регулирующего органа, представляющего собой регулирующий импульс по производной от отклонения регулируемого параметра. При этом наличие такой производной в законе регулирования благоприятно форсирует действие регуляторе на участке возрастания отклонения регулируемого параметра и тормозит действие регулятора на участке уменьшения отклонения регулируемой величины. Положительным результатом является и то, что в связи с использованием корректирующей инерционной массы с отмеченной "невесомостью" ort продолжает быть работоспособным и при невертикальности параллельных между собой продольных осей муфты 1 управляющего золотникового устройства гидродемпфера.
ДивитисяДодаткова інформація
Назва патенту англійськоюAutomatic indirect-acting regulator
Автори англійськоюMuzychuk Fedir Maksymovych
Назва патенту російськоюАвтоматический регулятор непрямого действия
Автори російськоюМузичук Федор Максимович
МПК / Мітки
Мітки: дії, непрямо, автоматичний, регулятор
Код посилання
<a href="https://ua.patents.su/4-1714-avtomatichnijj-regulyator-nepryamo-di.html" target="_blank" rel="follow" title="База патентів України">Автоматичний регулятор непрямої дії</a>
Пропорційно-диференційований регулятор музичука
Номер патенту: 271
Опубліковано: 30.04.1993
Автор: Музичук Федір Максимович
МПК: G05B 11/00
Мітки: музичука, пропорційно-диференційований, регулятор
Формула / Реферат:
Пропорционально - дифференцирующий регулятор, содержащий измеритель отклонения регулируемого параметра, муфта которого механически связана с осью качания суммирующего рычага с возможностью ее вертикального перемещения, причем один конец этого рычага соединен со штоком поршня катаракта и с пружиной, которая соединена со штоком поршня сервомотора, кинематически связанного с регулирующим органом, а второй конец суммирующего рычага соединен...
Хмельницька система автоматичного регулювання кутової швидкості теплової турбіни
Номер патенту: 836
Опубліковано: 15.12.1993
Автор: Музичук Федір Максимович
МПК: G05D 13/00
Мітки: швидкості, система, теплової, кутової, турбіни, автоматичного, хмельницька, регулювання
Формула / Реферат:
Хмельницкая система автоматического регулирования угловой скорости тепловой турбины, содержащая датчик угловой скорости, выполненный в виде подпружиненного центробежного механизма с грузами и соосной пружине муфтой, гидравлический цилиндрический поршневой серводвигатель с управляющим золотником и силовым штоком, гидравлическое цилиндрически-поршневое изодромное устройство, корпус-цилиндр которого, заполненный рабочей жидкостью, жестко связан...
Регулятор витрат
Номер патенту: 382
Опубліковано: 30.04.1993
Автор: Чекмасов Анатолій Васильович
МПК: G05D 7/00
Формула / Реферат:
Регулятор расхода, содержащий корпус с входным и выходным каналами, сообщенными через дросселирующую щель, и размещенный в корпусе поршень, нагруженный пружиной, расположенной в надпоршневой полости, причем выходной канал соединен через дроссель с надпоршневой полостью и потребителем, отличающийся тем, что, с целью упрощения и повышения точности регулятора, поршень выполнен с постоянным по его длине диаметром, внутренние поверхности...
Тернопільський всережимний гідравлічний регулятор частоти обертання двигуна внутрішнього згоряння
Номер патенту: 887
Опубліковано: 15.12.1993
Автор: Музичук Федір Максимович
МПК: F02D 1/00
Мітки: обертання, двигуна, всережимний, частоти, тернопільський, гідравлічний, згоряння, регулятор, внутрішнього
Формула / Реферат:
1. Тернопольский всережимный гидравлический регулятор частоты вращения двигателя внутреннего сгорания, содержащий орган управления, гидравлический насос, исполнительный гидроцилиндр с поршнем и штоком, связанным с органом дозирования, и дроссель с регулирующей иглой, входом и выходом, при этом выход насоса одновременно соединен с рабочей полостью исполнительного гидроцилиндра и входом дросселя, выход которого подключен к сливной магистрали, а...
Система для регулювання тиску рідинного або газового середовища, що транспортується по трубопроводу
Номер патенту: 1713
Опубліковано: 25.10.1994
Автори: Музичук Федір Максимович, Музичук Антон Максимович
МПК: G05D 16/00
Мітки: система, рідинного, тиску, середовища, транспортується, газового, регулювання, трубопроводу
Формула / Реферат:
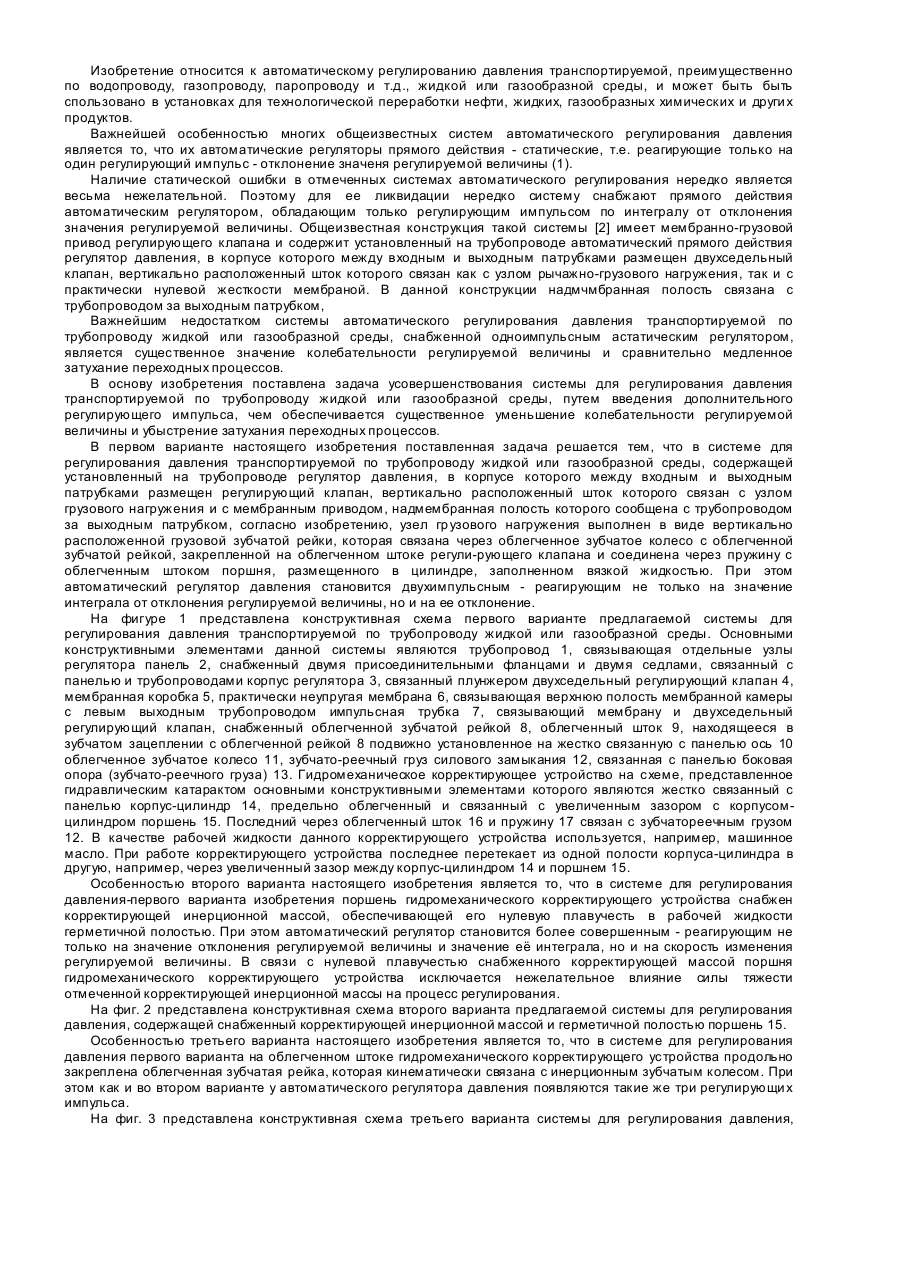
1. Система для регулирования давления транспортируемой по трубопроводу жидкой или газообразной среды, содержащая установленный на трубопроводе регулятор давления, в корпусе которого между входным и выходным патрубками размещен регулирующий клапан, вертикально расположенный шток которого связан с узлом грузового нагружения и с мембранным приводом, надмембранная полость которого сообщена с трубопроводом за выходным патрубком, отличающаяся тем,...
Попередній патент: Система для регулювання тиску рідинного або газового середовища, що транспортується по трубопроводу
Наступний патент: Телефонний номеронабирач
Випадковий патент: Спосіб диференційної діагностики остеоартрозу