Спосіб добування глибоководних розсипних корисних копалин та пристрій для його здійснення
Номер патенту: 17439
Опубліковано: 06.05.1997
Автори: Денисов Олексій Вікторович, Денисов Віктор Олексійович
Формула / Реферат
1. Способ добычи глубоководных россыпных полезных ископаемых, основанный на использовании придонного добывающего устройства с управляемым крылом, отличающийся тем, что погружение и удержание у дна осуществляют при буксировании за счет энергии судна-буксировщика и изменения угла атаки управляемого крыла, сбор и накопление полезных ископаемых осуществляют за счет расходования запасенной энергии перепада давления водной среды на глубине и у поверхностного океана, а разгрузку устройства проводят за счет использования электрической энергии, вырабатываемой на судне-буксировщике.
2. Устройство для добычи глубоководных россыпных полезных ископаемых, состоящее из придонного добывающего устройства и судна-буксировщика, отличающееся тем, что придонное добывающее устройство выполнено в виде модуля, составленного из батиплана и агрегата сбора, прикрепленного к батиплану с возможностью изменения длины крепления, причем на батиплане размещены системы энергообеспечения добычи и накопления полезных ископаемых, а на агрегате сбора смонтированы рабочий орган и гидродинамические рули глубины.
3. Устройство по п.2, отличающееся тем, что система энергообеспечения выполнена в виде емкости, соединенной трубопроводами через трехпозиционный клапан, гидромоторы рабочего органа и системы накопления, с окружающей средой.
4. Устройство по пп.2, 3, отличающееся тем, что система накопления выполнена в виде бункера, в верхней части которого врезан патрубок трубопровода подачи полезных ископаемых от агрегата сбора.
5. Устройство по пп.2,4, отличающееся тем, что система разгрузки выполнена в виде всасывающего патрубка, расположенного в нижней части бункера.
6. Устройство по п.2, отличающееся тем, что рабочий орган агрегата сбора выполнен в виде рамы с установленными на ней насосной системой с присоединенными в ней высоконапорным коллектором с форсунками для формирования подрезающего ножа совка из высокоэнергетических жестких струй воды и коллектором с гидромониторами на гибких патрубках.
Текст
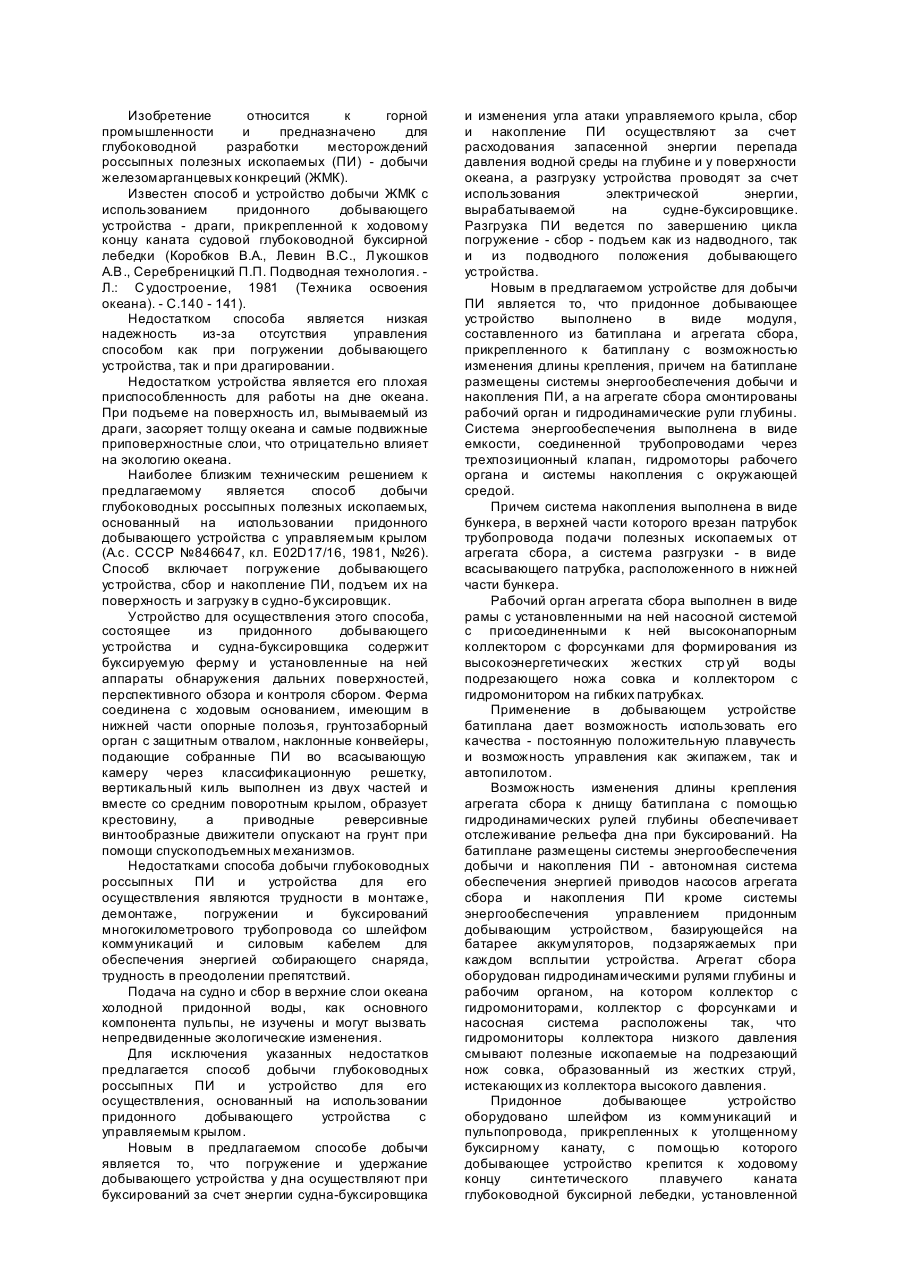
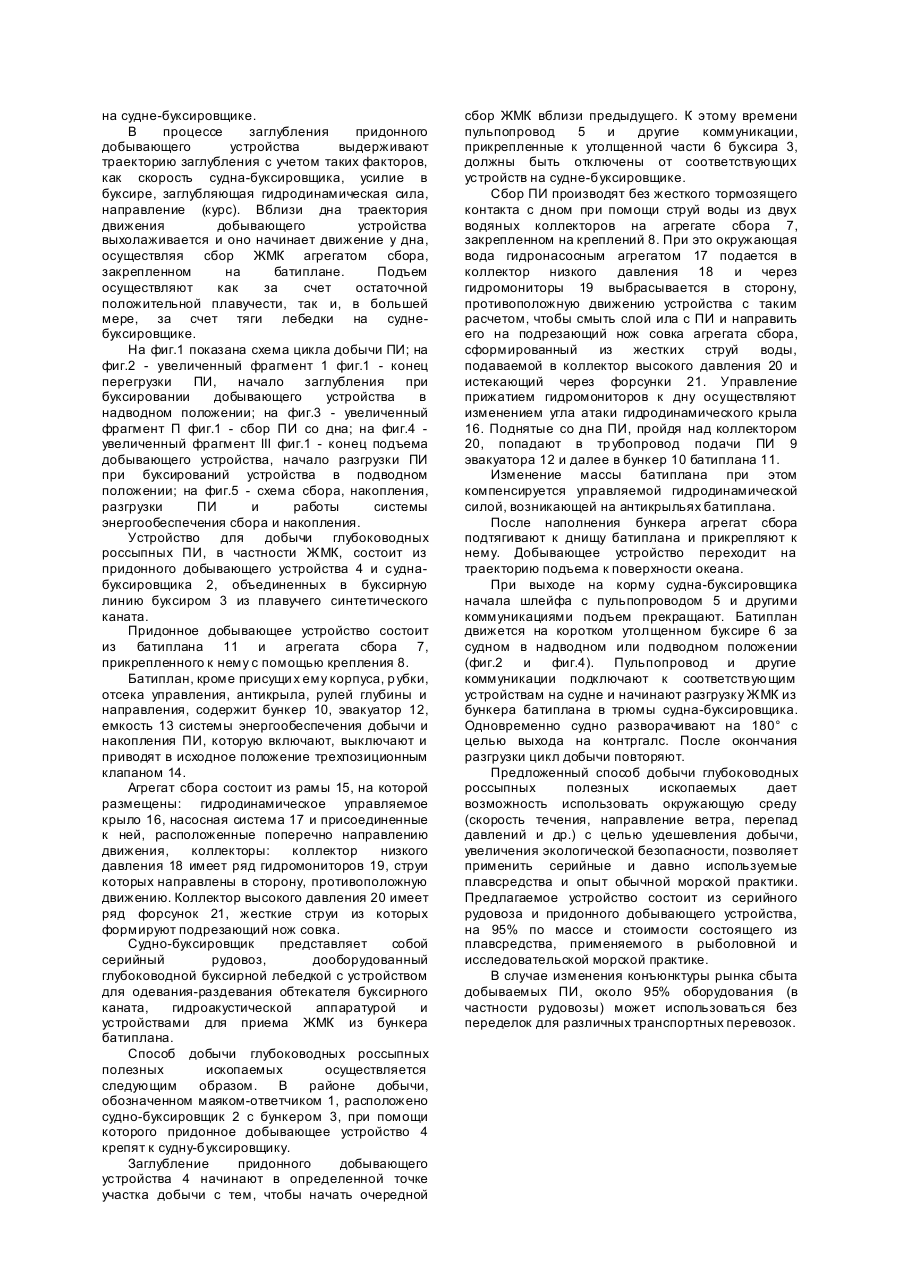
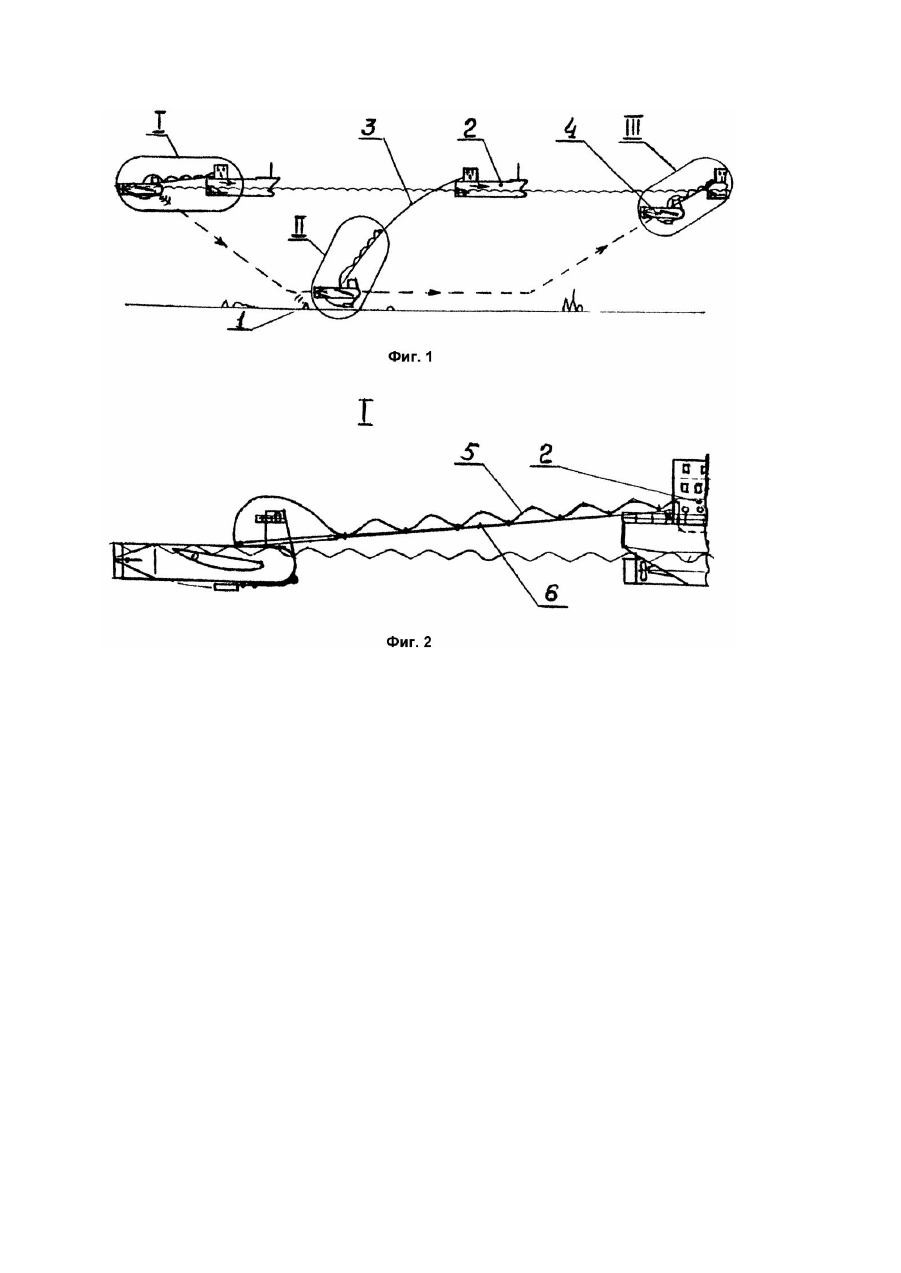
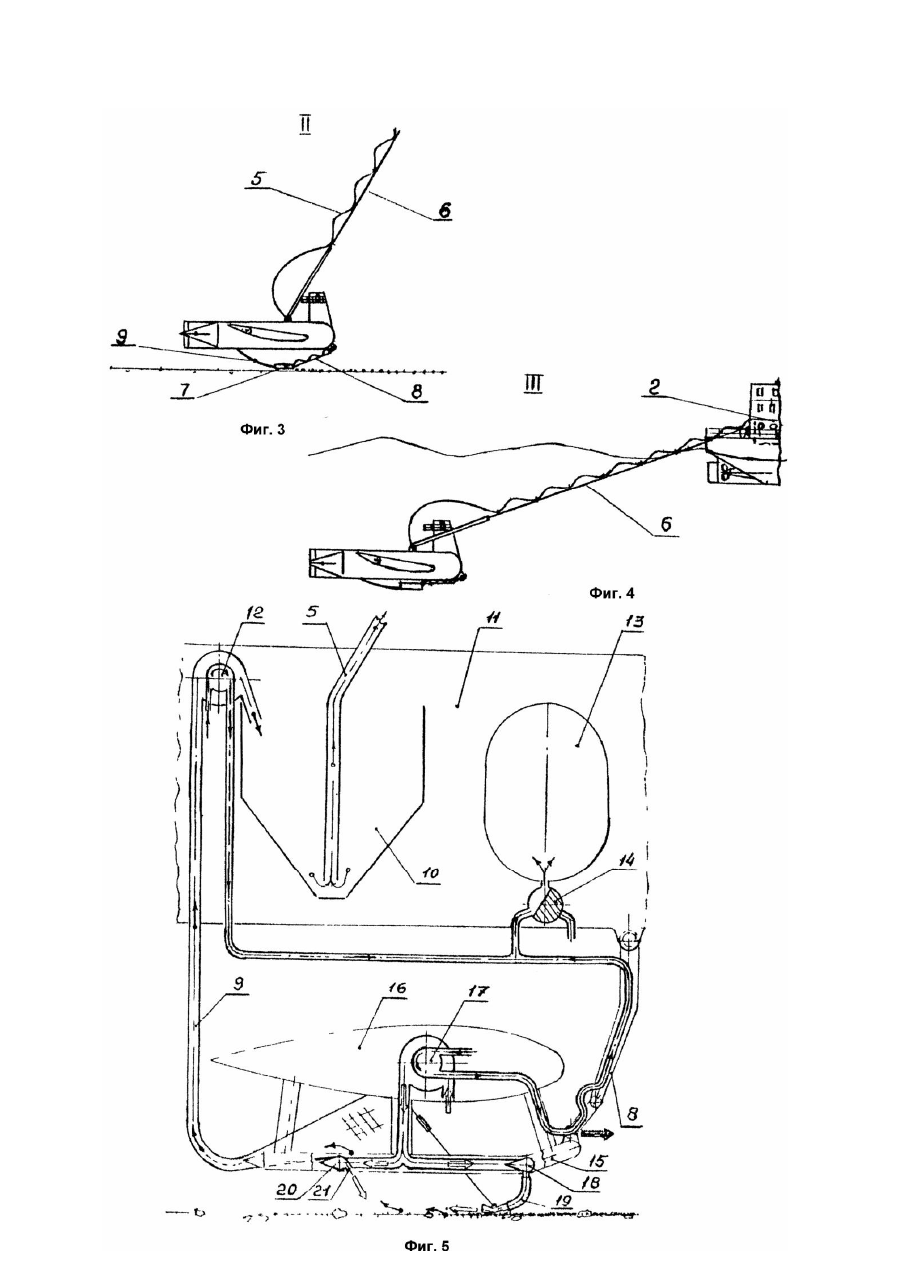
Изобретение относится к горной промышленности и предназначено для глубоководной разработки месторождений россыпных полезных ископаемых (ПИ) - добычи железомарганцевых конкреций (ЖМК). Известен способ и устройство добычи ЖМК с использованием придонного добывающего устройства - драги, прикрепленной к ходовому концу каната судовой глубоководной буксирной лебедки (Коробков В.А., Левин B.C., Лукошков А.В., Серебреницкий П.П. Подводная технология. Л.: С удостроение, 1981 (Техника освоения океана). - С.140 - 141). Недостатком способа является низкая надежность из-за отсутствия управления способом как при погружении добывающего устройства, так и при драгировании. Недостатком устройства является его плохая приспособленность для работы на дне океана. При подъеме на поверхность ил, вымываемый из драги, засоряет толщу океана и самые подвижные приповерхностные слои, что отрицательно влияет на экологию океана. Наиболее близким техническим решением к предлагаемому является способ добычи глубоководных россыпных полезных ископаемых, основанный на использовании придонного добывающего устройства с управляемым крылом (А.с. СССР №846647, кл. E02D17/16, 1981, №26). Способ включает погружение добывающего устройства, сбор и накопление ПИ, подъем их на поверхность и загрузку в судно-буксировщик. Устройство для осуществления этого способа, состоящее из придонного добывающего устройства и судна-буксировщика содержит буксируемую ферму и установленные на ней аппараты обнаружения дальних поверхностей, перспективного обзора и контроля сбором. Ферма соединена с ходовым основанием, имеющим в нижней части опорные полозья, грунтозаборный орган с защитным отвалом, наклонные конвейеры, подающие собранные ПИ во всасывающую камеру через классификационную решетку, вертикальный киль выполнен из двух частей и вместе со средним поворотным крылом, образует крестовину, а приводные реверсивные винтообразные движители опускают на грунт при помощи спускоподъемных механизмов. Недостатками способа добычи глубоководных россыпных ПИ и устройства для его осуществления являются трудности в монтаже, демонтаже, погружении и буксирований многокилометрового трубопровода со шлейфом коммуникаций и силовым кабелем для обеспечения энергией собирающего снаряда, трудность в преодолении препятствий. Подача на судно и сбор в верхние слои океана холодной придонной воды, как основного компонента пульпы, не изучены и могут вызвать непредвиденные экологические изменения. Для исключения указанных недостатков предлагается способ добычи глубоководных россыпных ПИ и устройство для его осуществления, основанный на использовании придонного добывающего устройства с управляемым крылом. Новым в предлагаемом способе добычи является то, что погружение и удержание добывающего устройства у дна осуществляют при буксирований за счет энергии судна-буксировщика и изменения угла атаки управляемого крыла, сбор и накопление ПИ осуществляют за счет расходования запасенной энергии перепада давления водной среды на глубине и у поверхности океана, а разгрузку устройства проводят за счет использования электрической энергии, вырабатываемой на судне-буксировщике. Разгрузка ПИ ведется по завершению цикла погружение - сбор - подъем как из надводного, так и из подводного положения добывающего устройства. Новым в предлагаемом устройстве для добычи ПИ является то, что придонное добывающее устройство выполнено в виде модуля, составленного из батиплана и агрегата сбора, прикрепленного к батиплану с возможностью изменения длины крепления, причем на батиплане размещены системы энергообеспечения добычи и накопления ПИ, а на агрегате сбора смонтированы рабочий орган и гидродинамические рули глубины. Система энергообеспечения выполнена в виде емкости, соединенной трубопроводами через трехпозиционный клапан, гидромоторы рабочего органа и системы накопления с окружающей средой. Причем система накопления выполнена в виде бункера, в верхней части которого врезан патрубок трубопровода подачи полезных ископаемых от агрегата сбора, а система разгрузки - в виде всасывающего патрубка, расположенного в нижней части бункера. Рабочий орган агрегата сбора выполнен в виде рамы с установленными на ней насосной системой с присоединенными к ней высоконапорным коллектором с форсунками для формирования из высокоэнергетических жестких стр уй воды подрезающего ножа совка и коллектором с гидромонитором на гибких патрубках. Применение в добывающем устройстве батиплана дает возможность использовать его качества - постоянную положительную плавучесть и возможность управления как экипажем, так и автопилотом. Возможность изменения длины крепления агрегата сбора к днищу батиплана с помощью гидродинамических рулей глубины обеспечивает отслеживание рельефа дна при буксирований. На батиплане размещены системы энергообеспечения добычи и накопления ПИ - автономная система обеспечения энергией приводов насосов агрегата сбора и накопления ПИ кроме системы энергообеспечения управлением придонным добывающим устройством, базирующейся на батарее аккумуляторов, подзаряжаемых при каждом всплытии устройства. Агрегат сбора оборудован гидродинамическими рулями глубины и рабочим органом, на котором коллектор с гидромониторами, коллектор с форсунками и насосная система расположены так, что гидромониторы коллектора низкого давления смывают полезные ископаемые на подрезающий нож совка, образованный из жестких струй, истекающих из коллектора высокого давления. Придонное добывающее устройство оборудовано шлейфом из коммуникаций и пульпопровода, прикрепленных к утолщенному буксирному канату, с помощью которого добывающее устройство крепится к ходовому концу синтетического плавучего каната глубоководной буксирной лебедки, установленной на судне-буксировщике. В процессе заглубления придонного добывающего устройства выдерживают траекторию заглубления с учетом таких факторов, как скорость судна-буксировщика, усилие в буксире, заглубляющая гидродинамическая сила, направление (курс). Вблизи дна траектория движения добывающего устройства выхолаживается и оно начинает движение у дна, осуществляя сбор ЖМК агрегатом сбора, закрепленном на батиплане. Подъем осуществляют как за счет остаточной положительной плавучести, так и, в большей мере, за счет тяги лебедки на суднебуксировщике. На фиг.1 показана схема цикла добычи ПИ; на фиг.2 - увеличенный фрагмент 1 фиг.1 - конец перегрузки ПИ, начало заглубления при буксировании добывающего устройства в надводном положении; на фиг.3 - увеличенный фрагмент П фиг.1 - сбор ПИ со дна; на фиг.4 увеличенный фрагмент III фиг.1 - конец подъема добывающего устройства, начало разгрузки ПИ при буксирований устройства в подводном положении; на фиг.5 - схема сбора, накопления, разгрузки ПИ и работы системы энергообеспечения сбора и накопления. Устройство для добычи глубоководных россыпных ПИ, в частности ЖМК, состоит из придонного добывающего устройства 4 и суднабуксировщика 2, объединенных в буксирную линию буксиром 3 из плавучего синтетического каната. Придонное добывающее устройство состоит из батиплана 11 и агрегата сбора 7, прикрепленного к нему с помощью крепления 8. Батиплан, кроме присущи х ему корпуса, р убки, отсека управления, антикрыла, рулей глубины и направления, содержит бункер 10, эвакуатор 12, емкость 13 системы энергообеспечения добычи и накопления ПИ, которую включают, выключают и приводят в исходное положение трехпозиционным клапаном 14. Агрегат сбора состоит из рамы 15, на которой размещены: гидродинамическое управляемое крыло 16, насосная система 17 и присоединенные к ней, расположенные поперечно направлению движения, коллекторы: коллектор низкого давления 18 имеет ряд гидромониторов 19, струи которых направлены в сторону, противоположную движению. Коллектор высокого давления 20 имеет ряд форсунок 21, жесткие струи из которых формируют подрезающий нож совка. Судно-буксировщик представляет собой серийный рудовоз, дооборудованный глубоководной буксирной лебедкой с устройством для одевания-раздевания обтекателя буксирного каната, гидроакустической аппаратурой и устройствами для приема ЖМК из бункера батиплана. Способ добычи глубоководных россыпных полезных ископаемых осуществляется следующим образом. В районе добычи, обозначенном маяком-ответчиком 1, расположено судно-буксировщик 2 с бункером 3, при помощи которого придонное добывающее устройство 4 крепят к судну-буксировщику. Заглубление придонного добывающего устройства 4 начинают в определенной точке участка добычи с тем, чтобы начать очередной сбор ЖМК вблизи предыдущего. К этому времени пульпопровод 5 и другие коммуникации, прикрепленные к утолщенной части 6 буксира 3, должны быть отключены от соответствующих устройств на судне-буксировщике. Сбор ПИ производят без жесткого тормозящего контакта с дном при помощи струй воды из двух водяных коллекторов на агрегате сбора 7, закрепленном на креплений 8. При это окружающая вода гидронасосным агрегатом 17 подается в коллектор низкого давления 18 и через гидромониторы 19 выбрасывается в сторону, противоположную движению устройства с таким расчетом, чтобы смыть слой ила с ПИ и направить его на подрезающий нож совка агрегата сбора, сформированный из жестких струй воды, подаваемой в коллектор высокого давления 20 и истекающий через форсунки 21. Управление прижатием гидромониторов к дну осуществляют изменением угла атаки гидродинамического крыла 16. Поднятые со дна ПИ, пройдя над коллектором 20, попадают в тр убопровод подачи ПИ 9 эвакуатора 12 и далее в бункер 10 батиплана 11. Изменение массы батиплана при этом компенсируется управляемой гидродинамической силой, возникающей на антикрыльях батиплана. После наполнения бункера агрегат сбора подтягивают к днищу батиплана и прикрепляют к нему. Добывающее устройство переходит на траекторию подъема к поверхности океана. При выходе на корму судна-буксировщика начала шлейфа с пульпопроводом 5 и другими коммуникациями подъем прекращают. Батиплан движется на коротком утолщенном буксире 6 за судном в надводном или подводном положении (фиг.2 и фиг.4). Пульпопровод и другие коммуникации подключают к соответствующим устройствам на судне и начинают разгрузку ЖМК из бункера батиплана в трюмы судна-буксировщика. Одновременно судно разворачивают на 180° с целью выхода на контргалс. После окончания разгрузки цикл добычи повторяют. Предложенный способ добычи глубоководных россыпных полезных ископаемых дает возможность использовать окружающую среду (скорость течения, направление ветра, перепад давлений и др.) с целью удешевления добычи, увеличения экологической безопасности, позволяет применить серийные и давно используемые плавсредства и опыт обычной морской практики. Предлагаемое устройство состоит из серийного рудовоза и придонного добывающего устройства, на 95% по массе и стоимости состоящего из плавсредства, применяемого в рыболовной и исследовательской морской практике. В случае изменения конъюнктуры рынка сбыта добываемых ПИ, около 95% оборудования (в частности рудовозы) может использоваться без переделок для различных транспортных перевозок.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for extraction of deep-water placer deposits of minerals and appliance for its implementation
Автори англійськоюDenysov Viktor Oleksiiovych, Denysov Oleksii Viktorovych
Назва патенту російськоюСпособ добычи глубоководных рассыпных полезных ископаемых и устройство для его осуществления
Автори російськоюДенисов Виктор Алексеевич, Денисов Алексей Викторович
МПК / Мітки
МПК: E21C 50/00
Мітки: здійснення, пристрій, копалин, добування, спосіб, глибоководних, розсипних, корисних
Код посилання
<a href="https://ua.patents.su/4-17439-sposib-dobuvannya-glibokovodnikh-rozsipnikh-korisnikh-kopalin-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб добування глибоководних розсипних корисних копалин та пристрій для його здійснення</a>
Установка для добування твердих корисних копалин з дна глибоководних водоймищ
Номер патенту: 14728
Опубліковано: 04.02.1997
Автори: Локтіонов Віктор Петрович, Зіборов Альберт Петрович, Варич Гліб Михайлович, Вольфсон Адольф Абрамович
МПК: E21C 50/00
Мітки: корисних, добування, твердих, глибоководних, копалин, установка, водоймищ, дна
Формула / Реферат:
1. Установка для добычи твердых полезных ископаемых со дна глубоководных водоемов, содержащая плавсредство с трубопроводной системой подъема, на нижнем конце которой размещен донный блок, соединенный с агрегатом сбора гибким трубопроводом, имеющий возможность перемещения вдоль трубного става с помощью гибкой связи, соединенной с плавсредством, отличающаяся тем, что она снабжена жесткой опорной платформой, смонтированной на концевой секции...
Спосіб відсадки корисних копалин та відсадувальна машина для його здійснення
Номер патенту: 13508
Опубліковано: 25.04.1997
Автори: Учитель Сергій Олександрович, Івченко Кім Давидович, Руль Олександр Сергійович, Тарасенко Валентин Лукіч, Білодаров Іван Васильйович
МПК: B03B 5/12
Мітки: копалин, відсадки, відсадувальна, спосіб, корисних, здійснення, машина
Формула / Реферат:
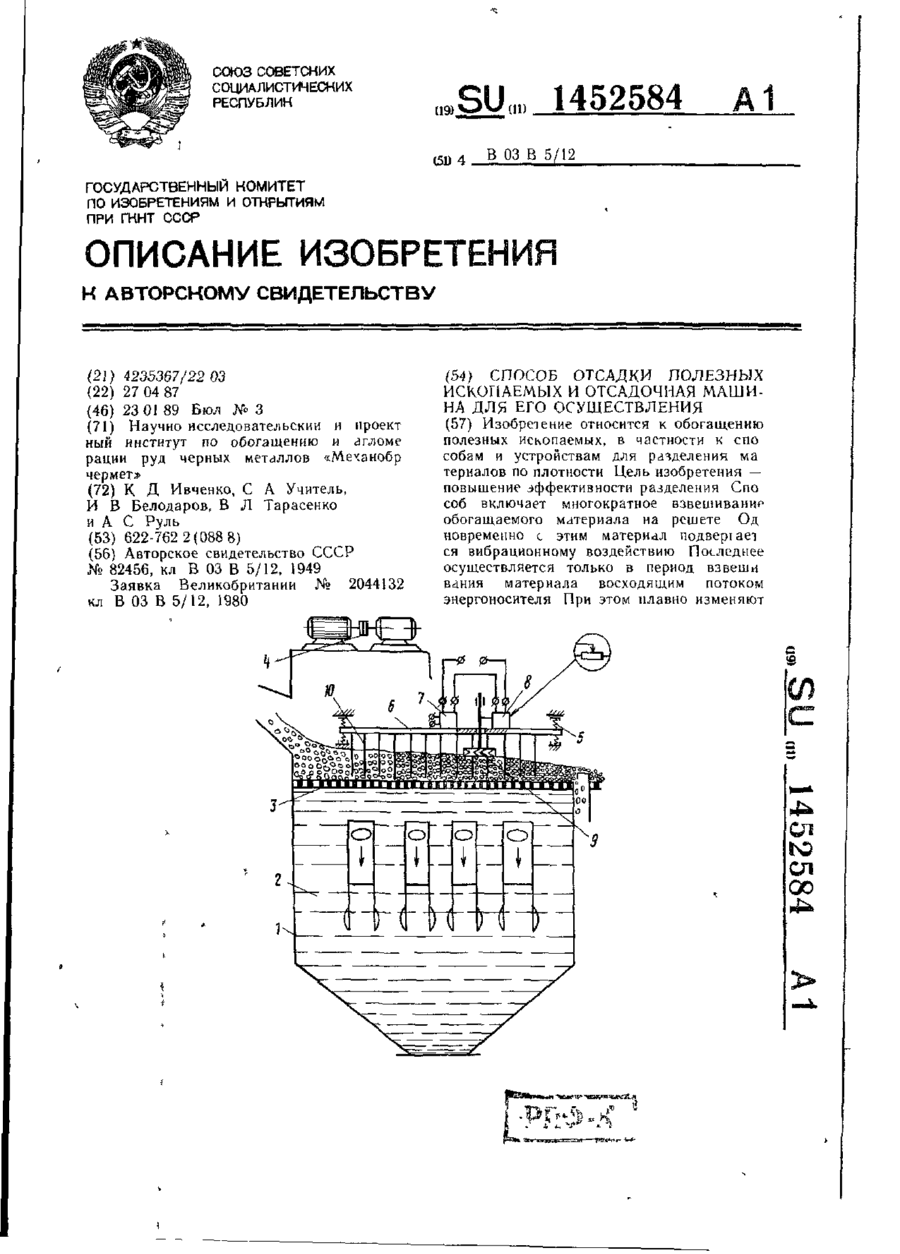
1. Способ отсадки полезных ископаемых, включающий подачу обогащаемого материала на решето, многократное взвешивание его потоком энергоносителя с одновременным вибрационным воздействием на материал, перемещение материала потоком энергоносителя в направлении разгрузки, послойную разгрузку готовых продуктов, отличающийся тем, что, с целью повышения эффективности разделения материала, вибрационное воздействие на материал осуществляют только в...
Установка для видобутку корисних копалин з дна моря
Номер патенту: 1734
Опубліковано: 25.10.1994
Автор: Симоненко Олександр Федорович
МПК: E21B 43/01
Мітки: дна, корисних, копалин, видобутку, моря, установка
Формула / Реферат:
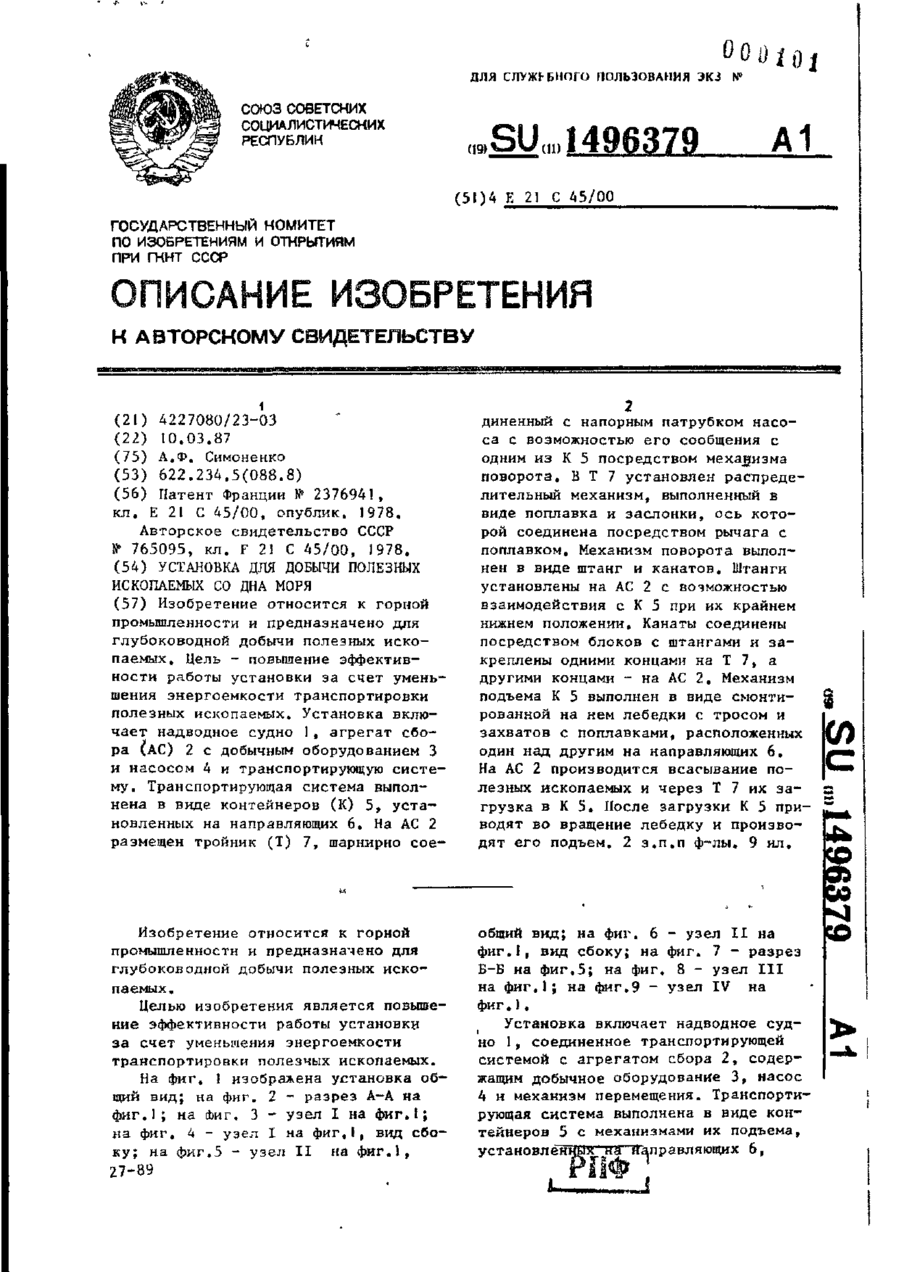
1. Установка для добычи полезных ископаемых со дна моря, включающая надводное судно, соединенное транспортирующей системой с агрегатом сбора, содержащим добычное оборудование, насос и механизм перемещения, отличающаяся тем, что, с целью повышения эффективности работы установки за счет уменьшения энергоемкости транспортировки полезных ископаемых, транспортирующая система выполнена в виде контейнеров с механизмами их подъема, посредством...
Спосіб відсадки корисних копалин
Номер патенту: 13501
Опубліковано: 25.04.1997
Автори: Івченко Кім Давидович, Лободіна Зоя Володимирівна, Учитель Сергій Олександрович, Тимофійова Марія Харитонівна
МПК: B03B 5/24
Мітки: спосіб, корисних, відсадки, копалин
Формула / Реферат:
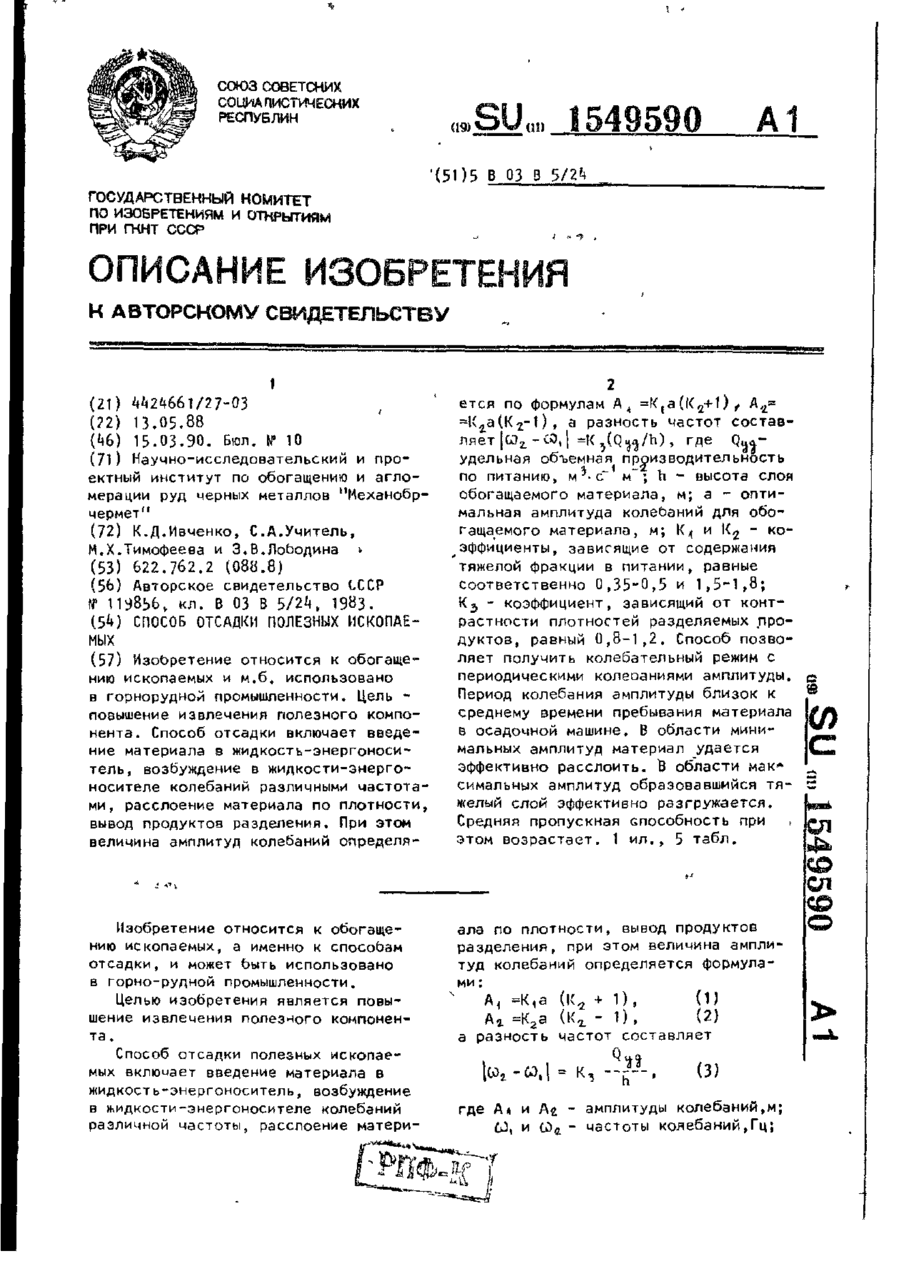
Способ отсадки полезных ископаемых, включающий введение материалов в жидкость-энергоноситель, возбуждение в жидкости-энергоносителе колебаний различной частоты, вывод продуктов разделения, отличающийся тем, что, с целью повышения извлечения полезного компонента, колебания возбуждают с амплитудами, величина которых определяется формуламиA1 = K1a(K2+1),А2 = К2а(К3-1), при частотах, разность которых...
Спосіб пилепридушення при розробленні корисних копалин
Номер патенту: 14234
Опубліковано: 25.04.1997
Автори: Миколаїва Генрієта Генриховна, Левертов Михайло Григорович, Любарський Борис Семенович, Валуконіс Генрікас Юозович
МПК: E21F 5/02
Мітки: копалин, розробленні, пилепридушення, корисних, спосіб
Формула / Реферат:
1. Способ пылеподавления при разработке полезных ископаемых, включающий подачу в зону пылеобразования гидрата галоидированного углеводорода, отличающийся тем, что, с целью повышения эффективности пылеподавления, в качестве галоидированного углеводорода используют дифторхлорбромметан.2. Способ по п. 1, отличающийся тем, что используют смесь гидрата дифторхлорбромметана с водой в виде гидратного шлама.
Попередній патент: Спосіб одержання біогумусу
Наступний патент: Пристрій для одержання заготовок стабільної маси на машинах безперервного лиття заготовок
Випадковий патент: Пристрій для полегшення запуску двигуна внутрішнього згорання