Спосіб підняття затонулого об’єкта
Номер патенту: 17520
Опубліковано: 06.05.1997
Автори: Снігур Анатолій Кирилович, Бугаєнко Борис Андрійович, Галь Анатолій Феодосійович
Формула / Реферат
Способ подъема затонувшего объекта, заключающийся в приложении к последнему подъемно-тягового усилия за счет выборки тягового каната с захватом, который опускают с самоходного надводного плавсредства при помощи спуско-подъемного устройства, на лебедке которого закреплен один конец упомянутого тягового каната, другой конец которого пропущен через обводной блок захвата и закреплен, отличающийся тем, что при опускании захвата используют также дополнительное спуско-подъемные устройства, расположенные на соответствующих дополнительных надводных самоходных плавсредствах, причем, другие концы тяговых канатов спуско-подъемного устройства пропускают через соответствующие обводные блоки захвата, которые расположены на верхних концах рычагов захвата с образованием полиспастной системы и закрепляют на одном или нескольких надводных плавсредствах, заякоренных в районе залегания затонувшего объекта, при этом захват опускают в раскрытом положении, а его наведение производят при помощи канатов-проводников, сигнальных буев и контроля позиционирования захвата относительно затонувшего объекта посредством подводных телекамер и системы подводного теленаведения и гидроакустических маяков и станций, а выборку тяговых канатов спуско-подъемных устройств осуществляют работой их лебедок и хода самоходных надводных плавсредств на расходящихся курсах.
Текст
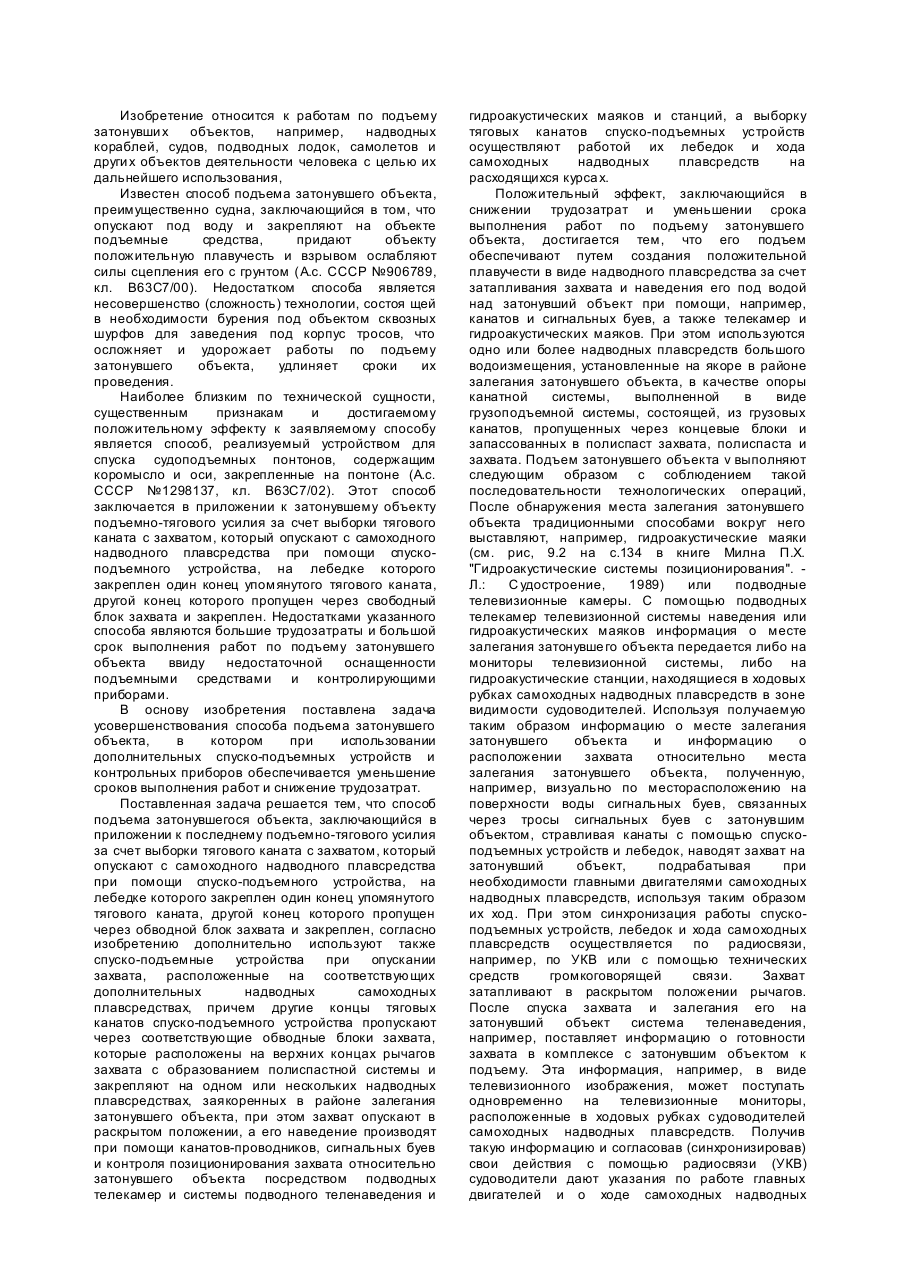
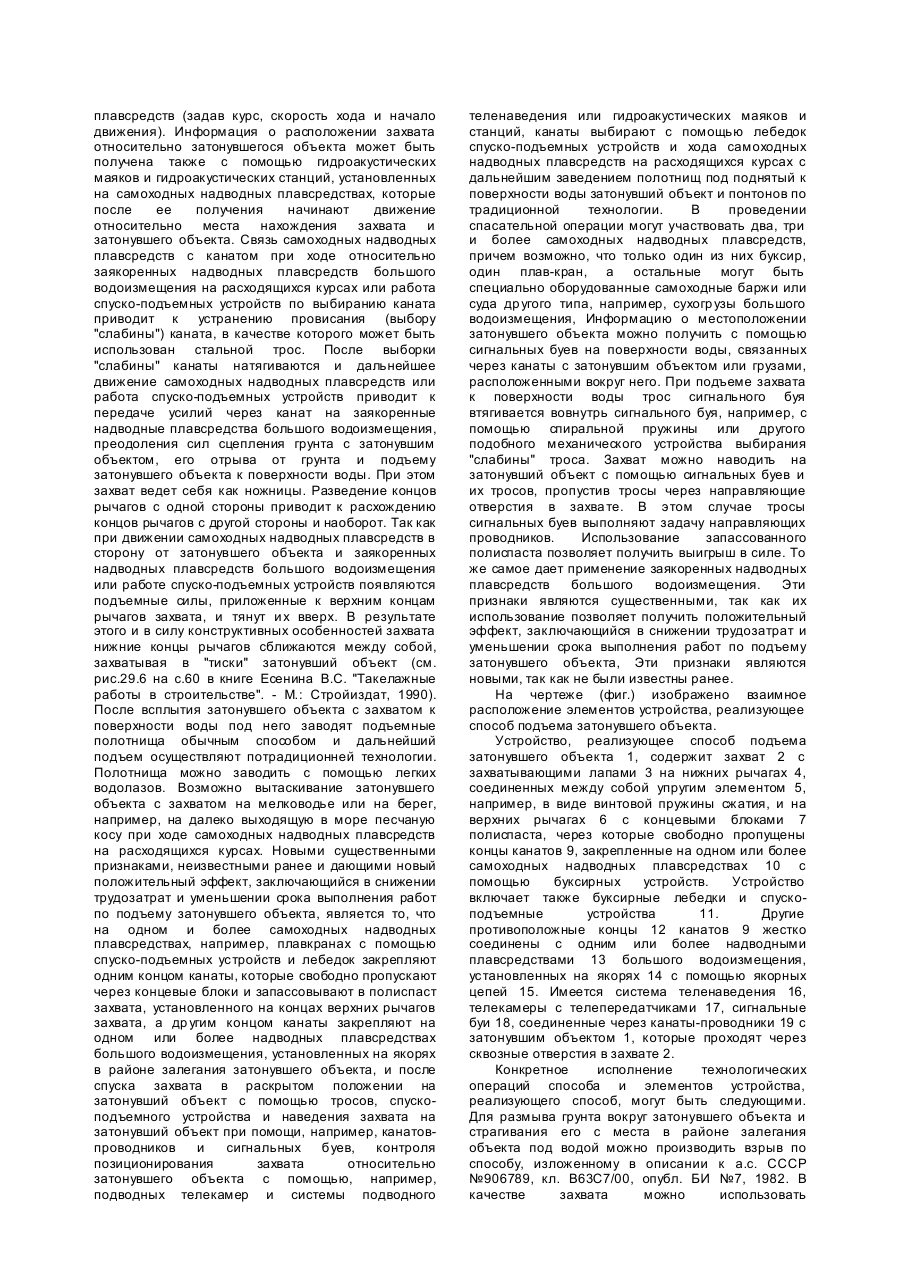
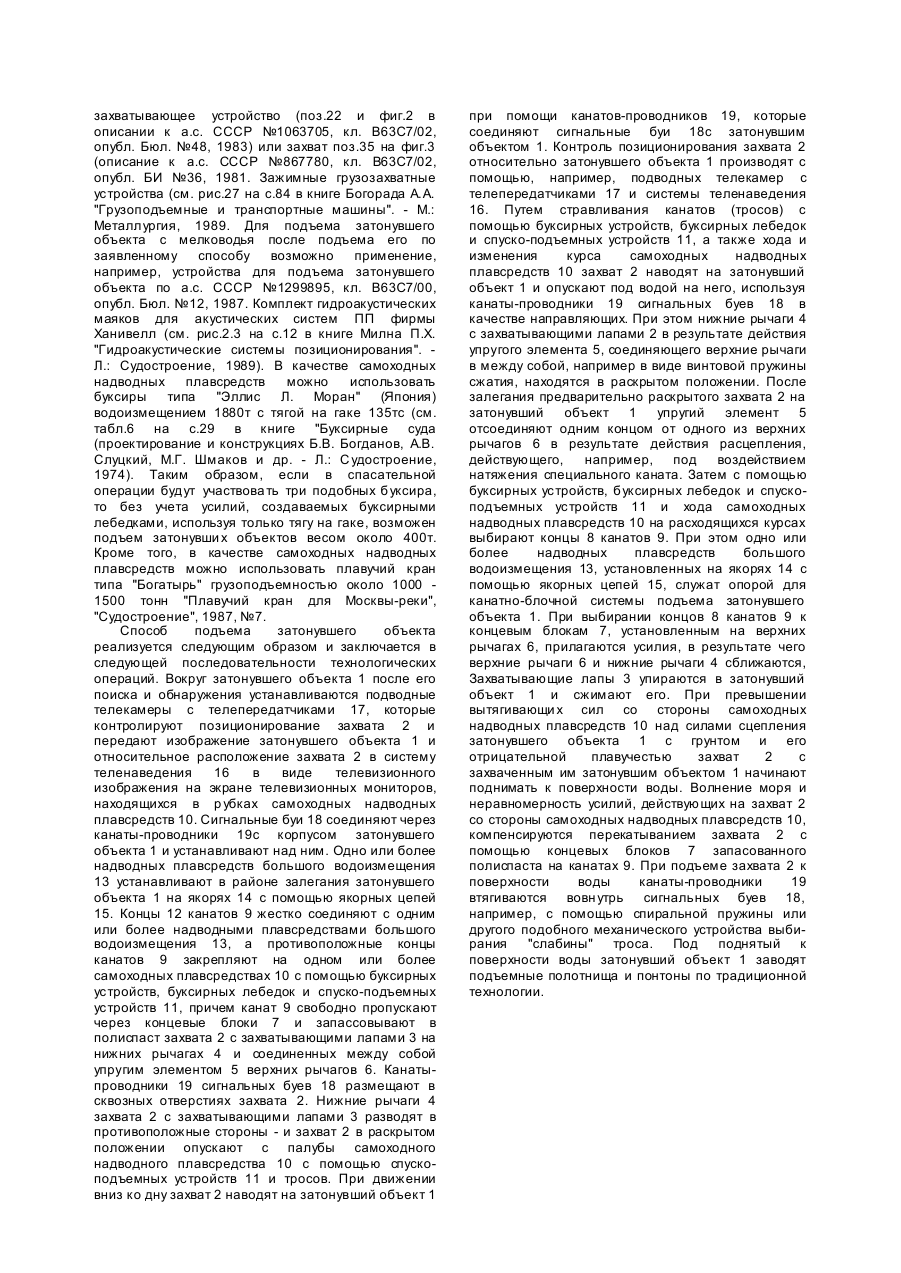
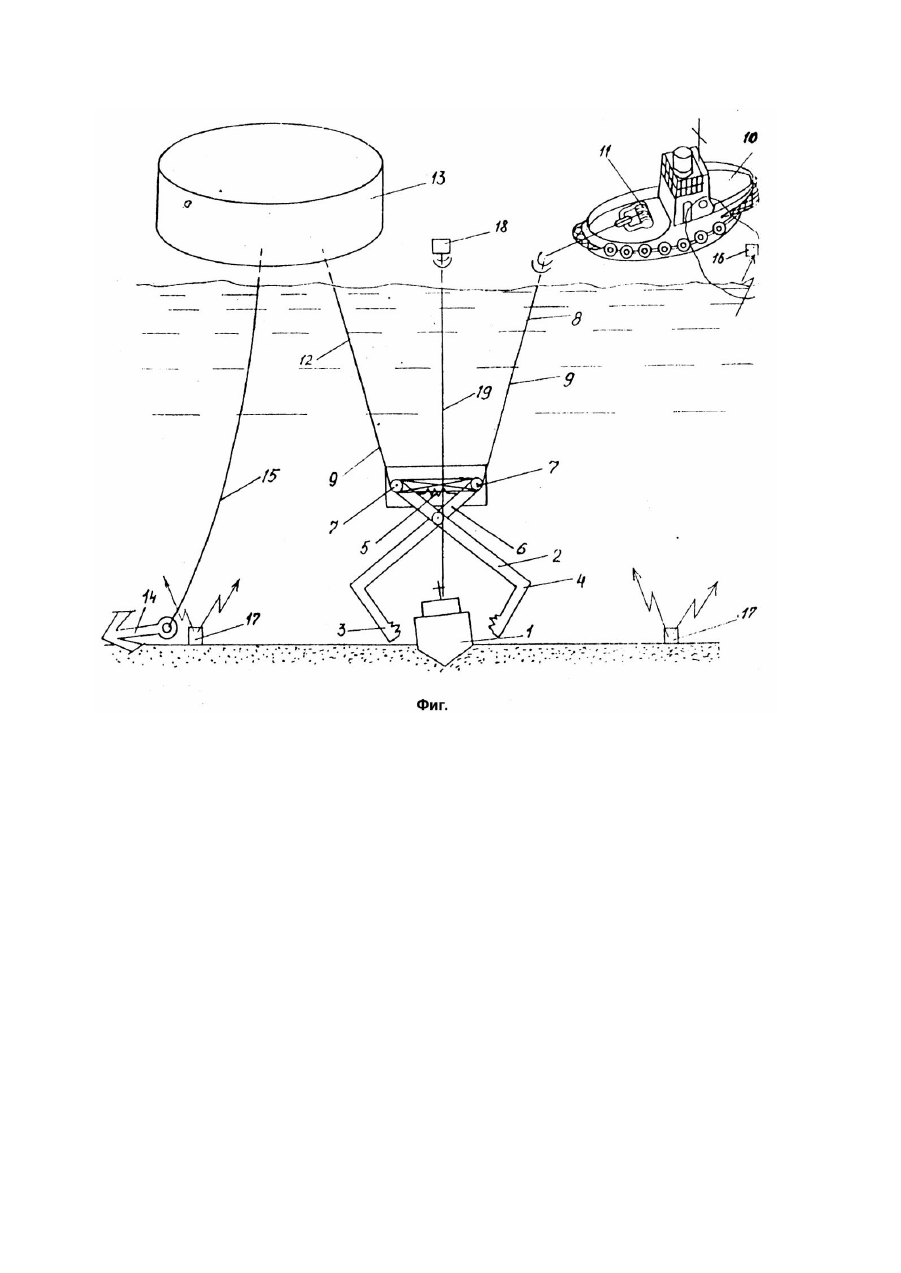
Изобретение относится к работам по подъему затонувши х объектов, например, надводных кораблей, судов, подводных лодок, самолетов и други х объектов деятельности человека с целью их дальнейшего использования, Известен способ подъема затонувшего объекта, преимущественно судна, заключающийся в том, что опускают под воду и закрепляют на объекте подъемные средства, придают объекту положительную плавучесть и взрывом ослабляют силы сцепления его с грунтом (А.с. СССР №906789, кл. B63C7/00). Недостатком способа является несовершенство (сложность) технологии, состоя щей в необходимости бурения под объектом сквозных шурфов для заведения под корпус тросов, что осложняет и удорожает работы по подъему затонувшего объекта, удлиняет сроки их проведения. Наиболее близким по технической сущности, существенным признакам и достигаемому положительному эффекту к заявляемому способу является способ, реализуемый устройством для спуска судоподъемных понтонов, содержащим коромысло и оси, закрепленные на понтоне (А.с. СССР №1298137, кл. B63C7/02). Этот способ заключается в приложении к затонувшему объекту подъемно-тягового усилия за счет выборки тягового каната с захватом, который опускают с самоходного надводного плавсредства при помощи спускоподъемного устройства, на лебедке которого закреплен один конец упомянутого тягового каната, другой конец которого пропущен через свободный блок захвата и закреплен. Недостатками указанного способа являются большие трудозатраты и большой срок выполнения работ по подъему затонувшего объекта ввиду недостаточной оснащенности подъемными средствами и контролирующими приборами. В основу изобретения поставлена задача усовершенствования способа подъема затонувшего объекта, в котором при использовании дополнительных спуско-подъемных устройств и контрольных приборов обеспечивается уменьшение сроков выполнения работ и снижение трудозатрат. Поставленная задача решается тем, что способ подъема затонувшегося объекта, заключающийся в приложении к последнему подъемно-тягового усилия за счет выборки тягового каната с захватом, который опускают с самоходного надводного плавсредства при помощи спуско-подъемного устройства, на лебедке которого закреплен один конец упомянутого тягового каната, другой конец которого пропущен через обводной блок захвата и закреплен, согласно изобретению дополнительно используют также спуско-подъемные устройства при опускании захвата, расположенные на соответствующих дополнительных надводных самоходных плавсредствах, причем другие концы тяговых канатов спуско-подъемного устройства пропускают через соответствующие обводные блоки захвата, которые расположены на верхних концах рычагов захвата с образованием полиспастной системы и закрепляют на одном или нескольких надводных плавсредствах, заякоренных в районе залегания затонувшего объекта, при этом захват опускают в раскрытом положении, а его наведение производят при помощи канатов-проводников, сигнальных буев и контроля позиционирования захвата относительно затонувшего объекта посредством подводных телекамер и системы подводного теленаведения и гидроакустических маяков и станций, а выборку тяговых канатов спуско-подъемных устройств осуществляют работой их лебедок и хода самоходных надводных плавсредств на расходящихся курса х. Положительный эффект, заключающийся в снижении трудозатрат и уменьшении срока выполнения работ по подъему затонувшего объекта, достигается тем, что его подъем обеспечивают путем создания положительной плавучести в виде надводного плавсредства за счет затапливания захвата и наведения его под водой над затонувший объект при помощи, например, канатов и сигнальных буев, а также телекамер и гидроакустических маяков. При этом используются одно или более надводных плавсредств большого водоизмещения, установленные на якоре в районе залегания затонувшего объекта, в качестве опоры канатной системы, выполненной в виде грузоподъемной системы, состоящей, из грузовых канатов, пропущенных через концевые блоки и запассованных в полиспаст захвата, полиспаста и захвата. Подъем затонувшего объекта v выполняют следующим образом с соблюдением такой последовательности технологических операций, После обнаружения места залегания затонувшего объекта традиционными способами вокруг него выставляют, например, гидроакустические маяки (см. рис, 9.2 на с.134 в книге Милна П.Х. "Гидроакустические системы позиционирования". Л.: С удостроение, 1989) или подводные телевизионные камеры. С помощью подводных телекамер телевизионной системы наведения или гидроакустических маяков информация о месте залегания затонувше го объекта передается либо на мониторы телевизионной системы, либо на гидроакустические станции, находящиеся в ходовых рубках самоходных надводных плавсредств в зоне видимости судоводителей. Используя получаемую таким образом информацию о месте залегания затонувшего объекта и информацию о расположении захвата относительно места залегания затонувшего объекта, полученную, например, визуально по месторасположению на поверхности воды сигнальных буев, связанных через тросы сигнальных буев с затонувшим объектом, стравливая канаты с помощью спускоподъемных устройств и лебедок, наводят захват на затонувший объект, подрабатывая при необходимости главными двигателями самоходных надводных плавсредств, используя таким образом их ход. При этом синхронизация работы спускоподъемных устройств, лебедок и хода самоходных плавсредств осуществляется по радиосвязи, например, по УКВ или с помощью технических средств громкоговорящей связи. Захват затапливают в раскрытом положении рычагов. После спуска захвата и залегания его на затонувший объект система теленаведения, например, поставляет информацию о готовности захвата в комплексе с затонувшим объектом к подъему. Эта информация, например, в виде телевизионного изображения, может поступать одновременно на телевизионные мониторы, расположенные в ходовых рубках судоводителей самоходных надводных плавсредств. Получив такую информацию и согласовав (синхронизировав) свои действия с помощью радиосвязи (УКВ) судоводители дают указания по работе главных двигателей и о ходе самоходных надводных плавсредств (задав курс, скорость хода и начало движения). Информация о расположении захвата относительно затонувшегося объекта может быть получена также с помощью гидроакустических маяков и гидроакустических станций, установленных на самоходных надводных плавсредствах, которые после ее получения начинают движение относительно места нахождения захвата и затонувшего объекта. Связь самоходных надводных плавсредств с канатом при ходе относительно заякоренных надводных плавсредств большого водоизмещения на расходящихся курсах или работа спуско-подъемных устройств по выбиранию каната приводит к устранению провисания (выбору "слабины") каната, в качестве которого может быть использован стальной трос. После выборки "слабины" канаты натягиваются и дальнейшее движение самоходных надводных плавсредств или работа спуско-подъемных устройств приводит к передаче усилий через канат на заякоренные надводные плавсредства большого водоизмещения, преодоления сил сцепления грунта с затонувшим объектом, его отрыва от грунта и подъему затонувшего объекта к поверхности воды. При этом захват ведет себя как ножницы. Разведение концов рычагов с одной стороны приводит к расхождению концов рычагов с другой стороны и наоборот. Так как при движении самоходных надводных плавсредств в сторону от затонувшего объекта и заякоренных надводных плавсредств большого водоизмещения или работе спуско-подъемных устройств появляются подъемные силы, приложенные к верхним концам рычагов захвата, и тянут и х вверх. В результате этого и в силу конструктивных особенностей захвата нижние концы рычагов сближаются между собой, захватывая в "тиски" затонувший объект (см. рис.29.6 на с.60 в книге Есенина B.C. "Такелажные работы в строительстве". - М.: Стройиздат, 1990). После всплытия затонувшего объекта с захватом к поверхности воды под него заводят подъемные полотнища обычным способом и дальнейший подъем осуществляют потрадиционней технологии. Полотнища можно заводить с помощью легких водолазов. Возможно вытаскивание затонувшего объекта с захватом на мелководье или на берег, например, на далеко выходящую в море песчаную косу при ходе самоходных надводных плавсредств на расходящихся курсах. Новыми существенными признаками, неизвестными ранее и дающими новый положительный эффект, заключающийся в снижении трудозатрат и уменьшении срока выполнения работ по подъему затонувшего объекта, является то, что на одном и более самоходных надводных плавсредствах, например, плавкранах с помощью спуско-подъемных устройств и лебедок закрепляют одним концом канаты, которые свободно пропускают через концевые блоки и запассовывают в полиспаст захвата, установленного на концах верхних рычагов захвата, а др угим концом канаты закрепляют на одном или более надводных плавсредствах большого водоизмещения, установленных на якорях в районе залегания затонувшего объекта, и после спуска захвата в раскрытом положении на затонувший объект с помощью тросов, спускоподъемного устройства и наведения захвата на затонувший объект при помощи, например, канатовпроводников и сигнальных буев, контроля позиционирования захвата относительно затонувшего объекта с помощью, например, подводных телекамер и системы подводного теленаведения или гидроакустических маяков и станций, канаты выбирают с помощью лебедок спуско-подъемных устройств и хода самоходных надводных плавсредств на расходящихся курсах с дальнейшим заведением полотнищ под поднятый к поверхности воды затонувший объект и понтонов по традиционной технологии. В проведении спасательной операции могут участвовать два, три и более самоходных надводных плавсредств, причем возможно, что только один из них буксир, один плав-кран, а остальные могут быть специально оборудованные самоходные баржи или суда др угого типа, например, сухогр узы большого водоизмещения, Информацию о местоположении затонувшего объекта можно получить с помощью сигнальных буев на поверхности воды, связанных через канаты с затонувшим объектом или грузами, расположенными вокруг него. При подъеме захвата к поверхности воды трос сигнального буя втягивается вовнутрь сигнального буя, например, с помощью спиральной пружины или другого подобного механического устройства выбирания "слабины" троса. Захват можно наводить на затонувший объект с помощью сигнальных буев и их тросов, пропустив тросы через направляющие отверстия в захва те. В этом случае тросы сигнальных буев выполняют задачу направляющих проводников. Использование запассованного полиспаста позволяет получить выигрыш в силе. То же самое дает применение заякоренных надводных плавсредств большого водоизмещения. Эти признаки являются существенными, так как их использование позволяет получить положительный эффект, заключающийся в снижении трудозатрат и уменьшении срока выполнения работ по подъему затонувшего объекта, Эти признаки являются новыми, так как не были известны ранее. На чертеже (фиг.) изображено взаимное расположение элементов устройства, реализующее способ подъема затонувшего объекта. Устройство, реализующее способ подъема затонувшего объекта 1, содержит захват 2 с захватывающими лапами 3 на нижних рычагах 4, соединенных между собой упругим элементом 5, например, в виде винтовой пружины сжатия, и на верхних рычагах 6 с концевыми блоками 7 полиспаста, через которые свободно пропущены концы канатов 9, закрепленные на одном или более самоходных надводных плавсредствах 10 с помощью буксирных устройств. Устройство включает также буксирные лебедки и спускоподъемные устройства 11. Другие противоположные концы 12 канатов 9 жестко соединены с одним или более надводными плавсредствами 13 большого водоизмещения, установленных на якорях 14 с помощью якорных цепей 15. Имеется система теленаведения 16, телекамеры с телепередатчиками 17, сигнальные буи 18, соединенные через канаты-проводники 19 с затонувшим объектом 1, которые проходят через сквозные отверстия в захвате 2. Конкретное исполнение технологических операций способа и элементов устройства, реализующего способ, могут быть следующими. Для размыва грунта вокруг затонувшего объекта и страгивания его с места в районе залегания объекта под водой можно производить взрыв по способу, изложенному в описании к а.с. СССР №906789, кл. B63C7/00, опубл. БИ №7, 1982. В качестве захвата можно использовать захватывающее устройство (поз.22 и фиг.2 в описании к а.с. СССР №1063705, кл. B63C7/02, опубл. Бюл. №48, 1983) или захват поз.35 на фиг.3 (описание к а.с. СССР №867780, кл. B63C7/02, опубл. БИ №36, 1981. Зажимные грузозахватные устройства (см. рис.27 на с.84 в книге Богорада А.А. "Грузоподъемные и транспортные машины". - М.: Металлургия, 1989. Для подъема затонувшего объекта с мелководья после подъема его по заявленному способу возможно применение, например, устройства для подъема затонувшего объекта по а.с. СССР №1299895, кл. B63C7/00, опубл. Бюл. №12, 1987. Комплект гидроакустических маяков для акустических систем ПП фирмы Ханивелл (см. рис.2.3 на с.12 в книге Милна П.Х. "Гидроакустические системы позиционирования". Л.: Судостроение, 1989). В качестве самоходных надводных плавсредств можно использовать буксиры типа "Эллис Л. Моран" (Япония) водоизмещением 1880т с тягой на гаке 135тс (см. табл.6 на с.29 в книге "Буксирные суда (проектирование и конструкциях Б.В. Богданов, А.В. Слуцкий, М.Г. Шмаков и др. - Л.: С удостроение, 1974). Таким образом, если в спасательной операции будут участвова ть три подобных буксира, то без учета усилий, создаваемых буксирными лебедками, используя только тягу на гаке, возможен подъем затонувши х объектов весом около 400т. Кроме того, в качестве самоходных надводных плавсредств можно использовать плавучий кран типа "Богатырь" грузоподъемностью около 1000 1500 тонн "Плавучий кран для Москвы-реки", "Судостроение", 1987, №7. Способ подъема затонувшего объекта реализуется следующим образом и заключается в следующей последовательности технологических операций. Вокруг затонувшего объекта 1 после его поиска и обнаружения устанавливаются подводные телекамеры с телепередатчиками 17, которые контролируют позиционирование захвата 2 и передают изображение затонувшего объекта 1 и относительное расположение захвата 2 в систему теленаведения 16 в виде телевизионного изображения на экране телевизионных мониторов, находящихся в р убках самоходных надводных плавсредств 10. Сигнальные буи 18 соединяют через канаты-проводники 19с корпусом затонувшего объекта 1 и устанавливают над ним. Одно или более надводных плавсредств большого водоизмещения 13 устанавливают в районе залегания затонувшего объекта 1 на якорях 14 с помощью якорных цепей 15. Концы 12 канатов 9 жестко соединяют с одним или более надводными плавсредствами большого водоизмещения 13, а противоположные концы канатов 9 закрепляют на одном или более самоходных плавсредствах 10 с помощью буксирных устройств, буксирных лебедок и спуско-подъемных устройств 11, причем канат 9 свободно пропускают через концевые блоки 7 и запассовывают в полиспаст захвата 2 с захватывающими лапами 3 на нижних рычагах 4 и соединенных между собой упругим элементом 5 верхних рычагов 6. Канатыпроводники 19 сигнальных буев 18 размещают в сквозных отверстиях захвата 2. Нижние рычаги 4 захвата 2 с захватывающими лапами 3 разводят в противоположные стороны - и захват 2 в раскрытом положении опускают с палубы самоходного надводного плавсредства 10 с помощью спускоподъемных устройств 11 и тросов. При движении вниз ко дну захват 2 наводят на затонувший объект 1 при помощи канатов-проводников 19, которые соединяют сигнальные буи 18с затонувшим объектом 1. Контроль позиционирования захвата 2 относительно затонувшего объекта 1 производят с помощью, например, подводных телекамер с телепередатчиками 17 и системы теленаведения 16. Путем стравливания канатов (тросов) с помощью буксирных устройств, буксирных лебедок и спуско-подъемных устройств 11, а также хода и изменения курса самоходных надводных плавсредств 10 захват 2 наводят на затонувший объект 1 и опускают под водой на него, используя канаты-проводники 19 сигнальных буев 18 в качестве направляющих. При этом нижние рычаги 4 с захватывающими лапами 2 в результате действия упругого элемента 5, соединяющего верхние рычаги в между собой, например в виде винтовой пружины сжатия, находятся в раскрытом положении. После залегания предварительно раскрытого захвата 2 на затонувший объект 1 упругий элемент 5 отсоединяют одним концом от одного из верхних рычагов 6 в результате действия расцепления, действующего, например, под воздействием натяжения специального каната. Затем с помощью буксирных устройств, буксирных лебедок и спускоподъемных устройств 11 и хода самоходных надводных плавсредств 10 на расходящихся курсах выбирают концы 8 канатов 9. При этом одно или более надводных плавсредств большого водоизмещения 13, установленных на якорях 14 с помощью якорных цепей 15, служат опорой для канатно-блочной системы подъема затонувшего объекта 1. При выбирании концов 8 канатов 9 к концевым блокам 7, установленным на верхних рычагах 6, прилагаются усилия, в результате чего верхние рычаги 6 и нижние рычаги 4 сближаются, Захватывающие лапы 3 упираются в затонувший объект 1 и сжимают его. При превышении вытягивающи х сил со стороны самоходных надводных плавсредств 10 над силами сцепления затонувшего объекта 1 с грунтом и его отрицательной плавучестью захват 2 с захваченным им затонувшим объектом 1 начинают поднимать к поверхности воды. Волнение моря и неравномерность усилий, действующих на захват 2 со стороны самоходных надводных плавсредств 10, компенсируются перекатыванием захвата 2 с помощью концевых блоков 7 запасованного полиспаста на канатах 9. При подъеме захвата 2 к поверхности воды канаты-проводники 19 втягиваются вовн утрь сигнальных буев 18, например, с помощью спиральной пружины или другого подобного механического устройства выбирания "слабины" троса. Под поднятый к поверхности воды затонувший объект 1 заводят подъемные полотнища и понтоны по традиционной технологии.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of lifting of sunken object
Автори англійськоюBuhaienko Borys Andriiovych, Hal Anatolii Feodosiiovych, Snihur Anatolii Kyrylovych
Назва патенту російськоюСпособ подъема затонувшего объекта
Автори російськоюБугаенко Борис Андреевич, Галь Анатолий Феодосьевич, Снигур Анатолий Кириллович
МПК / Мітки
Мітки: об'єкта, спосіб, затонулого, підняття
Код посилання
<a href="https://ua.patents.su/4-17520-sposib-pidnyattya-zatonulogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Спосіб підняття затонулого об’єкта</a>
Спосіб перевантаження діамагнітних вантажів та пристрій для його здійснення
Номер патенту: 11256
Опубліковано: 25.12.1996
Автори: Нунупаров Сергій Мартинович, Орлов Ігорь Борісовіч, Збаращенко Віталій Стефановіч, Іонін Сергей Петрович, Венско Олег Ігоревич, Олевич Павло Васильович
МПК: B66C 1/00
Мітки: пристрій, перевантаження, діамагнітних, вантажів, здійснення, спосіб
Формула / Реферат:
(57) 1. Способ перегрузки диамагнитных грузов с применением захвата на постоянных магнитах, заключающийся в том, что захват наводят на груз, подают импульс тока в катушку управления магнитом захвата, транспортируют груз вместе с захватом грузоподъемным средством и освобождают груз путем подачи импульса тока обратной полярности, отличающийся тем, что перед наведением захвата на грузе устанавливают грузонесущее средство с магнитом в центральной...
Пристрій для підняття коренеклубнеплодів

Номер патенту: 17379
Опубліковано: 15.04.1997
Автори: Верхола Леонід Арнольдович, Заєць Юрій Олександрович, Ємець Руслан Ярославович
МПК: B60P 1/00
Мітки: пристрій, коренеклубнеплодів, підняття
Формула / Реферат:
1. Устройство подъема корнеклубнеплодов, включающее скребковый конвейер с загрузочным бункером, состоящий из двух замкнутых тяговых цепей с закрепленными сплошными скребками, размещенными внутри желоба, установленного на станине, охватывающими концевую приводную звездочку, которая связана с приводом и натяжным устройством, отличающееся тем, что в устройстве сплошные скребки выполнены в виде изогнутой поверхности, имеющей ребра жесткости и...
Механізм підняття і повороту стебел льнозбирального комбайну
Номер патенту: 12601
Опубліковано: 28.02.1997
Автори: Горбовий Артур Юліанович, Сушко Іван Ількович, Хайліс Гедаль Абрамович, Бітов Віктор Васильович, Семерак Степан Володимирович
МПК: A01D 45/06
Мітки: повороту, механізм, стебел, льнозбирального, підняття, комбайну
Формула / Реферат:
Механизм подъема и поворота стеблей льноуборочного комбайна, содержащий установленные на раме подбирающий стебли рабочий орган, транспортер с полуперекрещивающимся ремнем с пальцами, отличающийся тем, что подбирающий стебли рабочий орган шарнирно установлен на дополнительной раме и выполнен в виде горизонтального транспортера, вал переднего шкива которого снабжен опорным колесом, а вдоль рабочей ветви транспортера с полуперекрешивающимся...
Система для піднімання затонулих об’єктів
Номер патенту: 10022
Опубліковано: 30.09.1996
Автор: Кунгурцев Юрій Миколайович
Мітки: об'єктів, система, піднімання, затонулих
Формула / Реферат:
1. Система для подъема затонувших объектов, включающая узел захвата со средством наведения на затонувший объект, опускаемый на объект понтон и средство продувки понтона газом, отличающаяся тем, что узел захвата выполнен в виде шарнирно соединенных в ряд арочных рамок, расположенных с возможностью охвата с боков затонувшего объекта, на стойках которых смонтированы подпружиненные защелки и снизу шарнирно прикреплены оппозитно расположенные...
Пристрій для піднімання об’єкту, що затонув
Номер патенту: 6979
Опубліковано: 31.03.1995
Автор: Сарний Азріель Іцкович
МПК: B63C 7/10
Мітки: затонув, пристрій, об'єкту, піднімання
Формула / Реферат:
(57) Устройство для подъема затонувшего объекта, содержащее, по крайней мере, од но грузоподъемное средство, выполненное в виде эластичной надувной оболочки с узлом крепления к затонувшему объекту и управляемым клапаном для поддержания равенства давления внутри оболочки с гидростатическим давлением, которая размещена внутри силовой сетки, при этом внутренняя полость оболочки магистрально сообщена с источником газа, расположенным на надводном...
Попередній патент: Борона гнучка обертова
Наступний патент: Машина для розмітки дорожного покриття
Випадковий патент: Котушка запалювання для двигуна внутрішнього згорання