Пристрій для нормування похибки кута повороту крокового двигуна
Номер патенту: 19455
Опубліковано: 15.12.2006

Формула / Реферат
Пристрій для нормування похибки кута повороту крокового двигуна, що містить корпус з посадочним гніздом для досліджуваного крокового двигуна і вихідну шину, який відрізняється тим, що в нього введені мікропроцесорний контролер, який містить таймер-лічильник та енергозалежну пам'ять, перші одинадцять виходів якого підключені до одинадцятирозрядної вихідної шини, а другі десять виходів з'єднані з десятирозрядною вихідною шиною, причому блок керування, виходи якого підключені до вихідної шини, яка з'єднана із обмотками досліджуваного крокового двигуна, через одинадцятирозрядну вихідну шину підключений до мікропроцесорного контролера, фотоелектричний сенсор кута повороту, перший і третій виходи якого з'єднані з другим і першим входами мікропроцесорного контролера, D-тригер, входи якого підключені до другого і першого виходів фотоелектричного сенсора, а вихід з'єднаний із третім входом мікропроцесорного контролера, блок індикації, який через десятирозрядну вихідну шину підключений до мікропроцесорного контролера, прецизійний редуктор, що містить першу і другу шестерні, перша шестірня якого закріплена на валу досліджуваного крокового двигуна, демпферну муфту, яка закріплена на валу другої шестірні прецизійного редуктора і валу фотоелектричного сенсора.
Текст
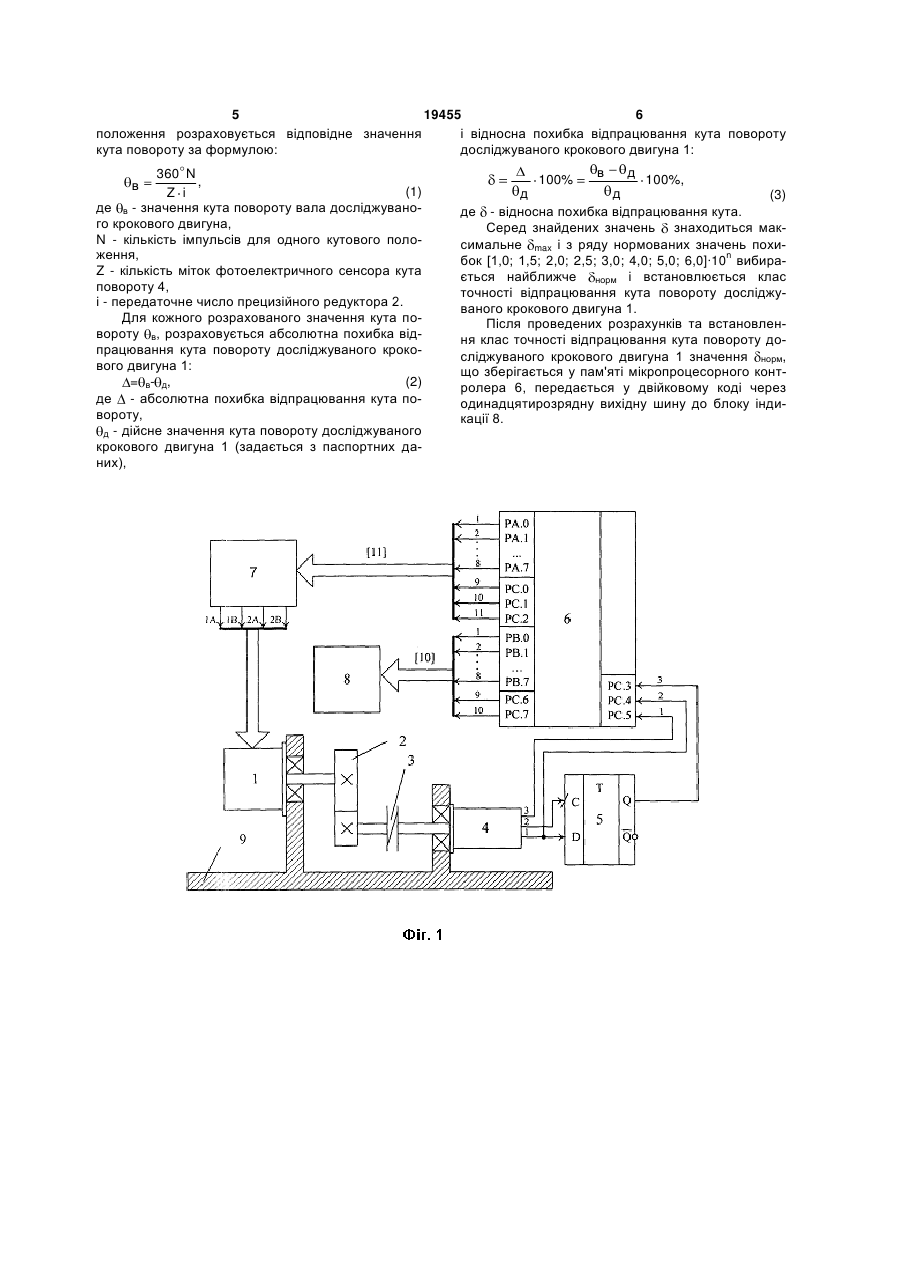
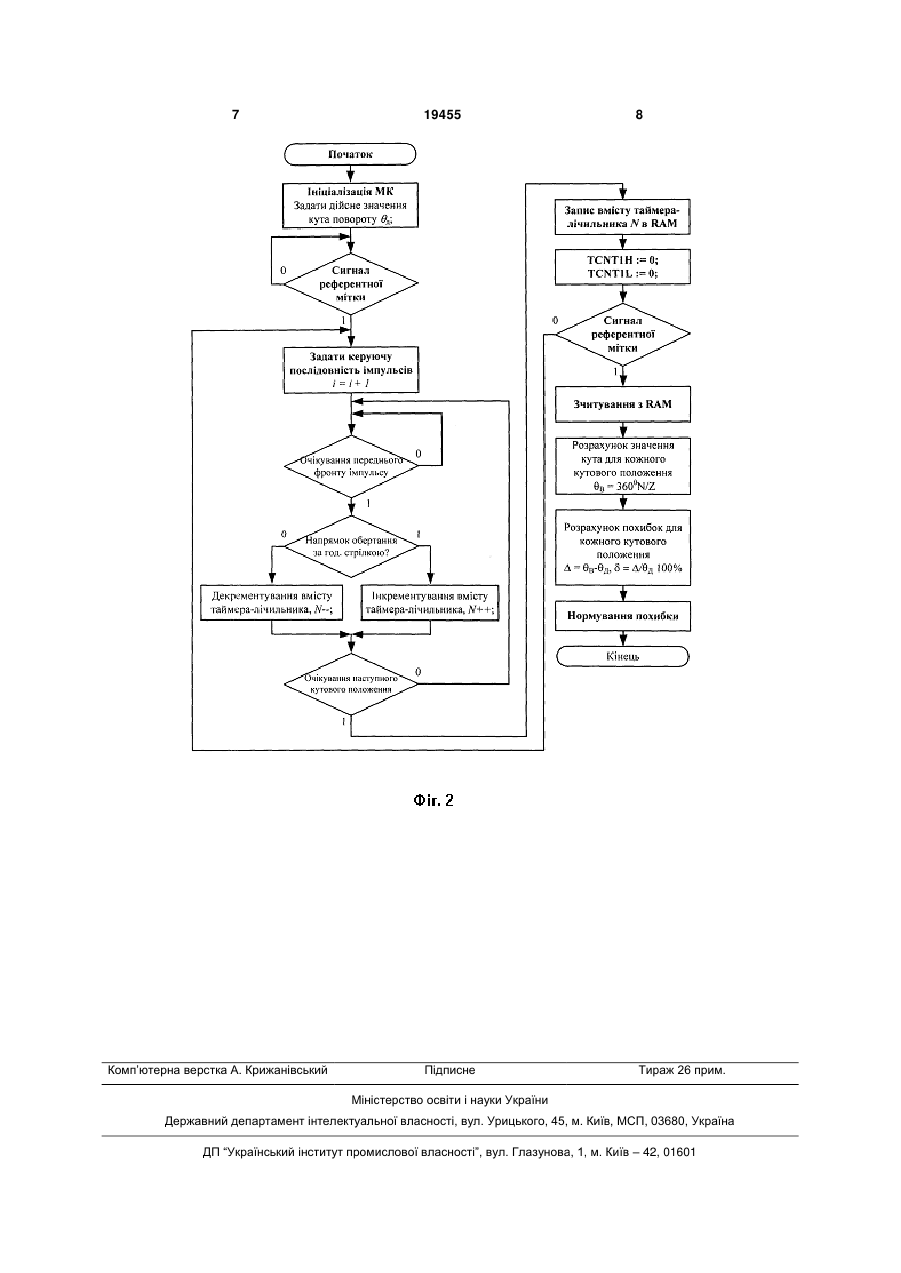
Пристрій для нормування похибки кута повороту крокового двигуна, що містить корпус з посадочним гніздом для досліджуваного крокового двигуна і вихідну шину, який відрізняється тим, що в нього введені мікропроцесорний контролер, який містить таймер-лічильник та енергозалежну пам'ять, перші одинадцять виходів якого підключені до одинадцятирозрядної вихідної шини, а другі десять виходів з'єднані з десятирозрядною вихідною шиною, причому блок керування, виходи якого 3 19455 4 цесу коливання вала досліджуваного крокового до третього входу мікропроцесорного контролера двигуна, призводить до зменшення швидкодії ви6. Прецизійний редуктор 2 містить першу і другу мірювання. Наявність електродвигуна та маховика шестерні, причому перша шестерня закріплена на збільшує момент інерції обертових елементів опивалу досліджуваного крокового двигуна 1, а друга суваного стенда, що зменшує чутливість і швидкошестерня з'єднана з демпферною муфтою 3, яка дію системи в цілому. закріплена на валу фотоелектричного сенсора 4. В основу корисної моделі поставлено задачу Пристрій працює наступним чином. Після постворення пристрою для нормування похибки кута дачі напруги на елементи 4, 5, 6, 7, 8 мікропроцеповороту крокового двигуна, в якому за рахунок сорний контролер 6 формує на своїх перших одивведення нових блоків та зв'язків між ними з'являнадцяти виходах сигнали настройки і синхронізації ється можливість підвищити точністю вимірюванблоку керування 7, який відповідно формує на своня, а забезпечення процесу вимірювання на проїй вихідній шині сигнали керування досліджуваним тязі перехідного процесу вала крокового двигуна кроковим двигуном 1 в покроковому режимі рободозволяє досягнути максимальної швидкодії. ти, обертання вала якого призводить до обертання Поставлена задача вирішується тим, що в обох шестерень прецизійного редуктора 2, що в пристрій для нормування похибки кута повороту свою чергу спричиняє обертання демпферної мукрокового двигуна, який містить корпус з посадочфти 3, яка передає механічний момент, створений ним гніздом для досліджуваного крокового двигуна досліджуваним кроковим двигуном 1, на вал фоі вихідну шину, введено мікропроцесорний контротоелектричного сенсора кута повороту 4, на перлер, перші одинадцять виходів якого підключені до шому і другому виходах якого формуються імпульодинадцяти розрядної вихідної шини, а другі деси прямокутної форми, причому сигнал на сять виходів з'єднані зі десятирозрядною вихідною першому виході відстає від сигналу другого виходу шиною, який містить таймер-лічильник та енергона ± /2 (знак + чи - залежить від напряму обертанзалежну пам'ять, блок керування, виходи якого ня вала досліджуваного крокового двигуна 1), що підключені до вихідної шини, яка з'єднана з обмотвідповідно надходять на С і D входи D-тригера 5, ками досліджуваного крокового двигуна, через на Q виході якого формується сигнал логічного одинадцяти розрядну вихідну шину підключений нуля або одиниці в залежності від знаку кута відсдо мікропроцесорного контролера, фотоелектричтавання першого виходу фотоелектричного сенсоний сенсор кута повороту, перший і третій виходи ра кута повороту 4 відносно другого, цим досягаякого з'єднані з другим і першим входами мікропється визначення напрямку обертання вала роцесорного контролера, D-тригер, С і D входи досліджуваного крокового двигуна 1 в даний моякого підключені до другого і першого виходів фомент часу. На третьому виході фотоелектричного тоелектричного сенсора, a Q вихід з'єднаний з сенсора кута повороту 4 формується сигнал ретретім входом мікропроцесорного контролера, ферентної мітки після кожного повного оберту ваблок індикації, який через десятирозрядну вихідну ла, що надходить на перший вхід мікропроцесоршину підключений до мікропроцесорного контроного контролера 6. лера, прецизійний редуктор, що містить першу і Після появи на першому вході мікропроцесордругу шестерні, перша шестерня якого закріплена ного контролера 6 сигналу референтної мітки з на валу досліджуваного крокового двигуна, демптретього виходу фотоелектричного сенсора кута ферну муфту, яка закріплена на валу другої шесповороту 4 і появи на його перших одинадцяти терні прецизійного редуктора і валу фотоелектривиходах наступних імпульсів синхронізації блоку чного сенсора. керування 7, відбувається процес підрахунку імпуНа Фіг.1 подана структурна схема пристрою льсів, що надходять на другий вхід мікропроцесодля нормування похибки кута повороту крокового рного контролера 6 з першого виходу фотоелектдвигуна, на Фіг.2 представлено алгоритм роботи ричного сенсора кута повороту 4, шляхом пристрою для нормування похибки кута повороту інкрементування або декрементування вмісту його крокового двигуна. таймера-лічильника в залежності від сигналу на На Фіг.1 представлено: 1 - досліджуваний кройого третьому вході, що надходить з Q виходу D ковий двигун, 2 - прецизійний редуктор, 3 - демптригера 5, після формування на його перших одиферна муфта, 4 - фотоелектричний сенсор кута надцяти виходах наступних імпульсів синхронізації повороту, 5 - D-тригер, 6 - мікропроцесорний контблоку керування 7, вміст таймера-лічильника зберолер, 7 - блок керування, 8 - блок індикації, 9 рігається у енергозалежну пам'ять мікропроцесоркорпус. При цьому мікропроцесорний контролер 6, ного контролера 6 і обнуляється, на цьому заверперші одинадцять виходів якого з'єднані з одинадшується процес підрахунку імпульсів для даного цятирозрядною вихідною шиною, що підключена стійкого кутового положення. Підрахунок імпульсів, до блоку керування 7, виходи якого з'єднані з вихіщо надходять на другий вхід мікропроцесорного дною шиною, що підключена до обмоток досліконтролера 6 з першого виходу фотоелектричного джуваного крокового двигуна 1, що закріплений на сенсора кута повороту 4, повторюється після кожкорпусі 9, а другі десять виходів з'єднані зі десятиного формування на його перших одинадцяти вирозрядною вихідною шиною, що підключена до ходах наступних імпульсів синхронізації блоку кеблоку індикації 8. Перший і третій виходи фотоерування 7 для кожного наступного стійкого лектричного сенсора кута повороту 4, що закріпкутового положення, і остаточно завершується лений на корпусі 9, підключені до другого і першопісля появи на першому вході мікропроцесорного го входів мікропроцесорного контролера 6, а контролера 6 сигналу референтної мітки з третьоперший і другий виходи з'єднані відповідно з С і D го виходу фотоелектричного сенсора кута поворовходами D-тригера 5, Q вихід якого підключений ту 4. Після цього для кожного стійкого кутового 5 19455 6 положення розраховується відповідне значення і відносна похибка відпрацювання кута повороту кута повороту за формулою: досліджуваного крокового двигуна 1: N в д 360 100% 100%, , в (1) Z i д д (3) де в - значення кута повороту вала досліджуваноде - відносна похибка відпрацювання кута. го крокового двигуна, Серед знайдених значень знаходиться макN - кількість імпульсів для одного кутового полосимальне max і з ряду нормованих значень похиження, бок [1,0; 1,5; 2,0; 2,5; 3,0; 4,0; 5,0; 6,0]·10n вибираZ - кількість міток фотоелектричного сенсора кута ється найближче норм і встановлюється клас повороту 4, точності відпрацювання кута повороту досліджуі - передаточне число прецизійного редуктора 2. ваного крокового двигуна 1. Для кожного розрахованого значення кута поПісля проведених розрахунків та встановленвороту в, розраховується абсолютна похибка відня клас точності відпрацювання кута повороту допрацювання кута повороту досліджуваного крокосліджуваного крокового двигуна 1 значення норм, вого двигуна 1: що зберігається у пам'яті мікропроцесорного конт= в- д, (2) ролера 6, передається у двійковому коді через де - абсолютна похибка відпрацювання кута поодинадцятирозрядну вихідну шину до блоку індивороту, кації 8. д - дійсне значення кута повороту досліджуваного крокового двигуна 1 (задається з паспортних даних), 7 Комп’ютерна верстка А. Крижанівський 19455 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for determining the error of the rotation angle of a step motor
Автори англійськоюKukharchuk Vasyl Vasyliovych, Usov Viktor Vasyliovych
Назва патенту російськоюУстройство для определения погрешности угла поворота шагового электродвигателя
Автори російськоюКухарчук Василий Васильевич, Усов Виктор Васильевич
МПК / Мітки
МПК: G01B 11/26
Мітки: пристрій, повороту, двигуна, похибки, крокового, кута, нормування
Код посилання
<a href="https://ua.patents.su/4-19455-pristrijj-dlya-normuvannya-pokhibki-kuta-povorotu-krokovogo-dviguna.html" target="_blank" rel="follow" title="База патентів України">Пристрій для нормування похибки кута повороту крокового двигуна</a>
Пристрій для перетворення коду кута повороту вала в число імпульсів
Номер патенту: 6677
Опубліковано: 16.05.2005
Автор: Ніколенко Сергій Іванович
МПК: G08C 19/00
Мітки: повороту, число, імпульсів, перетворення, вала, кута, пристрій, коду
Формула / Реферат:
Пристрій для перетворення коду кута повороту вала в число імпульсів, що містить перетворювач кут-код, виходи якого через формувач з'єднані з одними входами перших схем І, другі входи перших схем І підключені до перших виходів програмного блока, другий вихід якого підключений до входу перетворювача кут-код, треті входи перших схем І з'єднані з виходом лічильника, вхід якого підключений до других виходів програмного блока, виходи перших схем І...
Слідкуючий перетворювач кута повороту вала в код

Номер патенту: 3149
Опубліковано: 15.10.2004
Автор: Ніколенко Сергій Іванович
МПК: G08C 19/00, H03M 1/64
Мітки: вала, повороту, кута, перетворювач, слідкуючий, код
Формула / Реферат:
Слідкуючий перетворювач кута повороту вала в код, що містить синусно-косинусний датчик кута, виходи якого з'єднані з першими входами блоків множення, виходи яких підключені до входів блока віднімання, вихід якого підключений до входу компаратора і входу блока перетворення амплітуди напруги у послідовний код, вихід якого з'єднаний з лічильним входом реверсивного лічильника, який через блок синусно-косинусного перетворення коду підключений до...
Перетворювач кута повороту вала в код
Номер патенту: 50217
Опубліковано: 15.10.2002
Автор: Ніколенко Сергій Іванович
МПК: H03M 1/64
Мітки: перетворювач, кута, повороту, код, вала
Формула / Реферат:
Перетворювач кута повороту вала в код, що містить фазообертач, вхід і вихід якого через перший і другий нуль компаратори відповідно підключені до входів тригера, вихід тригера і вихід генератора імпульсів підключені до входів першого елемента І, вихід якого підключений до інформаційного входу лічильника, виходи розрядів лічильника підключені до інформаційних входів першого регістра, шину живлення, підключену до входу фазообертача, який...
Перетворювач кута повороту вала в код
Номер патенту: 50224
Опубліковано: 15.10.2002
Автор: Ніколенко Сергій Іванович
МПК: H03M 1/64
Мітки: повороту, код, вала, перетворювач, кута
Формула / Реферат:
Перетворювач кута повороту вала в код, що містить фазообертач, вихід якого з’єднаний з входом першого нуль-компаратора, другий нуль-компаратор, послідовно з’єднані генератор імпульсів, подільник частоти, формувач напруги живлення фазообертача, вихід якого з’єднаний з одним входом першого елемента І, другий вхід якого підключений до виходу генератора імпульсів, а вихід з’єднаний з інформаційним входом лічильника, вихід якого з’єднаний з...
Привід покажчика кута повороту

Номер патенту: 51820
Опубліковано: 16.12.2002
Автори: Андрус Сергій Григорович, Гутніченко Євген Опанасович
МПК: F41A 27/00
Мітки: привід, кута, повороту, покажчика
Формула / Реферат:
1. Привід покажчика кута повороту, що містить вал, з'єднаний з валом покажчика конічною передачею, а з механізмом повороту - через циліндричну шестірню, який відрізняється тим, що циліндрична шестірня виконана розрізною двовінцевою, причому перший вінець установлений з можливістю осьового переміщення відносно вала, а другий - з можливістю осьового і кутового переміщення відносно вала, на якому розміщена пружина кручення осьової дії, при цьому...
Попередній патент: Установка для напаювання пакетом стрічок
Наступний патент: Спосіб профілактики і комплексного лікування гострого гнійного обструктивного пієлонефриту
Випадковий патент: Комбінація декоративної кришки і закупорювального ковпачка