Спосіб побудови панорамного фотограмметричного зображення
Номер патенту: 19565
Опубліковано: 15.12.2006
Автори: Могильний Сергій Георгійович, Луньов Андрій Олександрович


Формула / Реферат
Спосіб побудови панорамного фотограмметричного зображення, що включає використання декількох знімків, виконаних з однієї точки простору шляхом повороту камери в горизонтальному і вертикальному напрямках, який відрізняється тим, що їх з'єднують в еквівалентне панорамне зображення на основі точок, розташованих в областях перекриття суміжних знімків на основі вираження:
 ,
,
де ![]() і
і ![]() - координати точок на i та j знімках відповідно;
- координати точок на i та j знімках відповідно;
![]() і
і ![]() - направляючі косинуси відповідно i та j знімків, обчислені по їх кутах повороту відносно осей панорамного знімка,
- направляючі косинуси відповідно i та j знімків, обчислені по їх кутах повороту відносно осей панорамного знімка,
причому необхідна наявність не менше однієї камери.
Текст
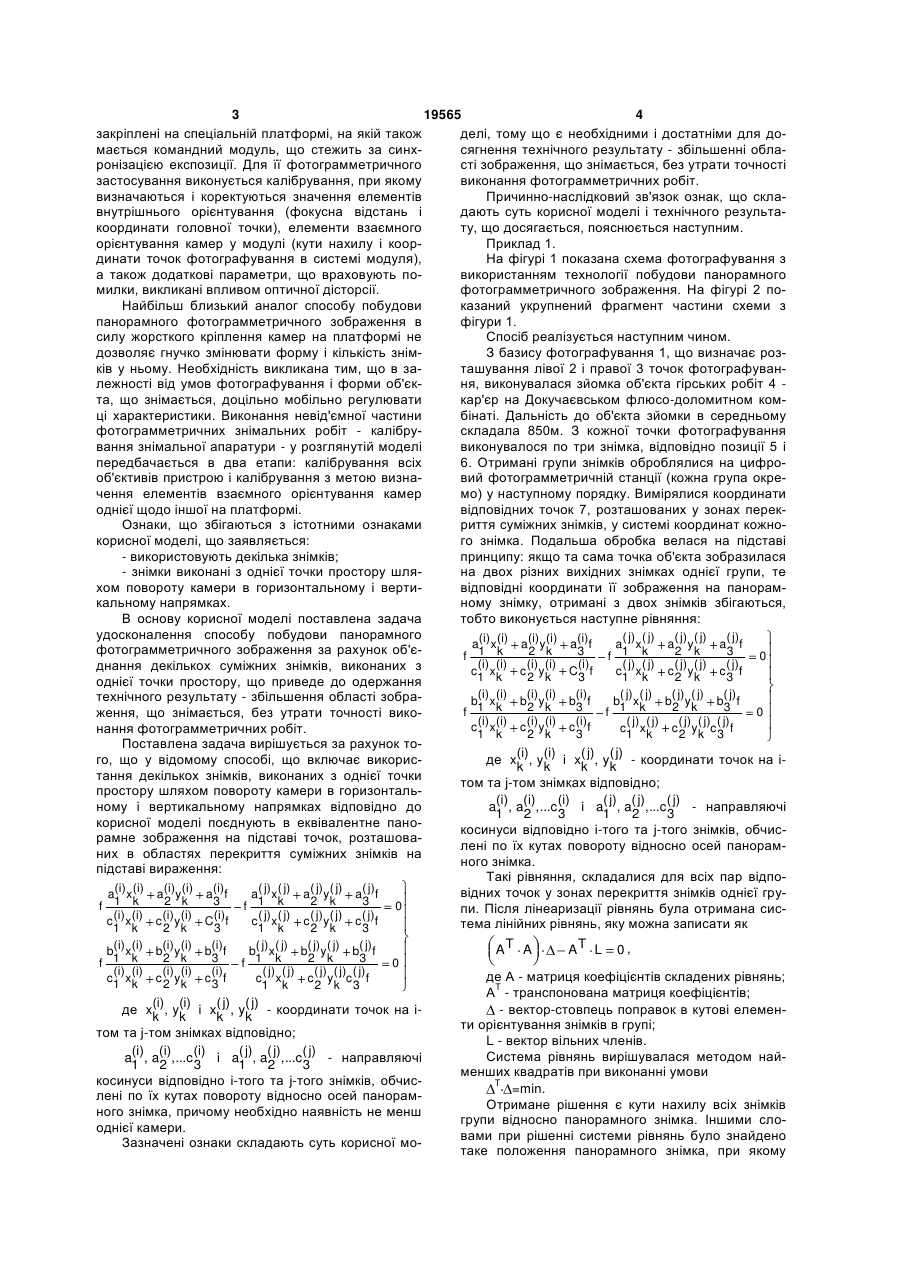
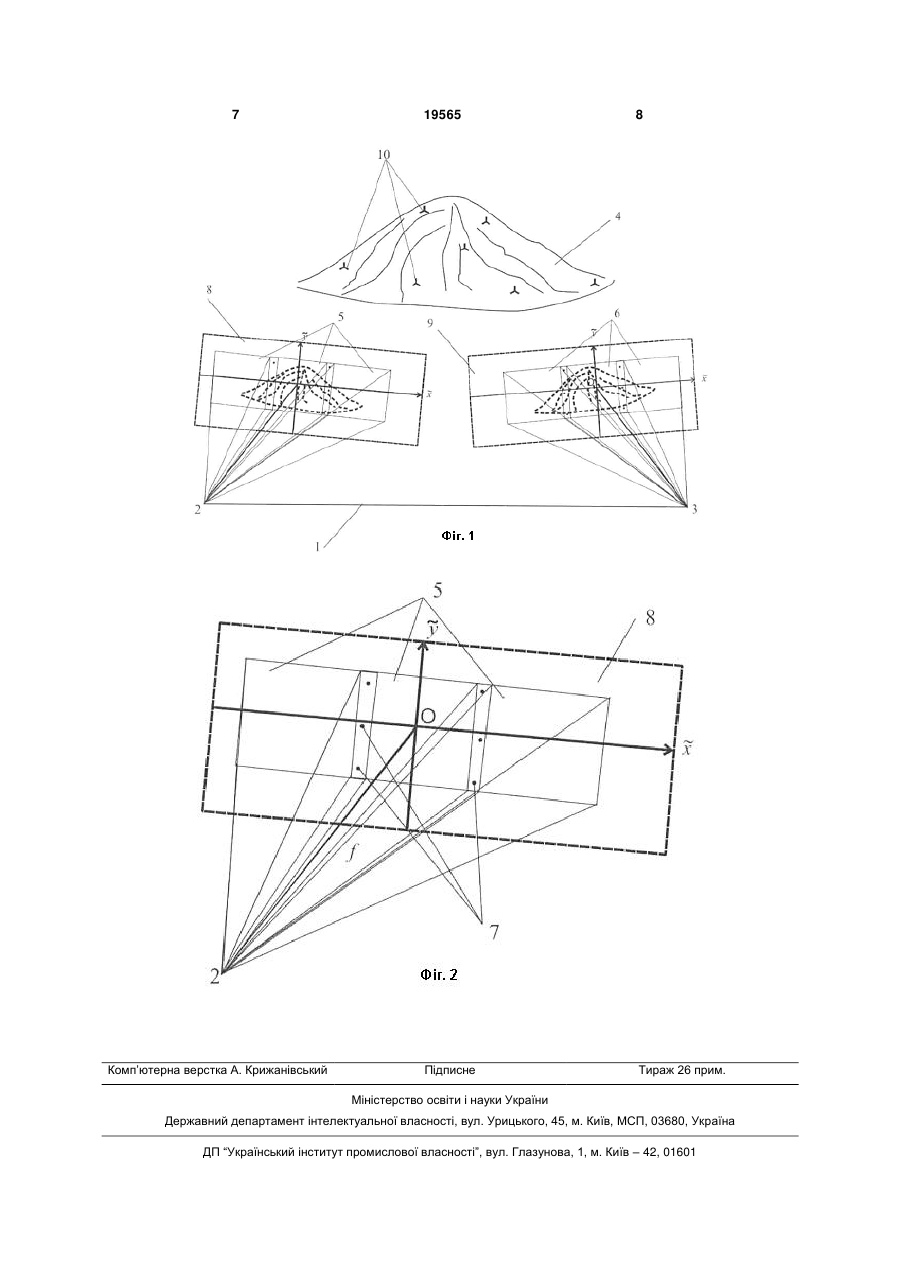
Спосіб побудови панорамного фотограмметричного зображення, що включає використання декількох знімків, виконаних з однієї точки простору шляхом повороту камери в горизонтальному і вертикальному напрямках, який відрізняється тим, що їх з'єднують в еквівалентне панорамне зображення на основі точок, розташованих в областях перекриття суміжних знімків на основі вираження: 2 3 19565 4 закріплені на спеціальній платформі, на якій також делі, тому що є необхідними і достатніми для домається командний модуль, що стежить за синхсягнення технічного результату - збільшенні обларонізацією експозиції. Для її фотограмметричного сті зображення, що знімається, без утрати точності застосування виконується калібрування, при якому виконання фотограмметричних робіт. визначаються і коректуються значення елементів Причинно-наслідковий зв'язок ознак, що склавнутрішнього орієнтування (фокусна відстань і дають суть корисної моделі і технічного результакоординати головної точки), елементи взаємного ту, що досягається, пояснюється наступним. орієнтування камер у модулі (кути нахилу і коорПриклад 1. динати точок фотографування в системі модуля), На фігурі 1 показана схема фотографування з а також додаткові параметри, що враховують повикористанням технології побудови панорамного милки, викликані впливом оптичної дісторсії. фотограмметричного зображення. На фігурі 2 поНайбільш близький аналог способу побудови казаний укрупнений фрагмент частини схеми з панорамного фотограмметричного зображення в фігури 1. силу жорсткого кріплення камер на платформі не Спосіб реалізується наступним чином. дозволяє гнучко змінювати форму і кількість знімЗ базису фотографування 1, що визначає розків у ньому. Необхідність викликана тим, що в заташування лівої 2 і правої 3 точок фотографуванлежності від умов фотографування і форми об'єкня, виконувалася зйомка об'єкта гірських робіт 4 та, що знімається, доцільно мобільно регулювати кар'єр на Докучаєвськом флюсо-доломитном комці характеристики. Виконання невід'ємної частини бінаті. Дальність до об'єкта зйомки в середньому фотограмметричних знімальних робіт - калібрускладала 850м. З кожної точки фотографування вання знімальної апаратури - у розглянутій моделі виконувалося по три знімка, відповідно позиції 5 і передбачається в два етапи: калібрування всіх 6. Отримані групи знімків оброблялися на цифрооб'єктивів пристрою і калібрування з метою визнавий фотограмметричній станції (кожна група окречення елементів взаємного орієнтування камер мо) у наступному порядку. Вимірялися координати однієї щодо іншої на платформі. відповідних точок 7, розташованих у зонах перекОзнаки, що збігаються з істотними ознаками риття суміжних знімків, у системі координат кожнокорисної моделі, що заявляється: го знімка. Подальша обробка велася на підставі - використовують декілька знімків; принципу: якщо та сама точка об'єкта зобразилася - знімки виконані з однієї точки простору шляна двох різних вихідних знімках однієї групи, те хом повороту камери в горизонтальному і вертивідповідні координати її зображення на панорамкальному напрямках. ному знімку, отримані з двох знімків збігаються, В основу корисної моделі поставлена задача тобто виконується наступне рівняння: удосконалення способу побудови панорамного ( j) ( j) ( j) ( j) ( j) a(i)x(i) a(i)y(i) a(i)f a x a y a f фотограмметричного зображення за рахунок об'є2 k 3 2 k 3 f 1 k f 1 k 0 ( j) ( j) ( j) ( j) ( j) днання декількох суміжних знімків, виконаних з c(i)x(i) c(i)y(i) C(i)f c x c y c f 1 k 2 k 3 1 k 2 k 3 однієї точки простору, що приведе до одержання ( j) ( j) ( j) ( j) ( j) технічного результату - збільшення області зобраb(i)x(i) b(i)y(i) b(i)f b x b y b f 2 k 3 2 k 3 f 1 k f 1 k 0 ження, що знімається, без утрати точності вико(i)x(i) c(i)y(i) c(i)f ( j) ( j) ( j) ( j) ( j) c c x c y c f нання фотограмметричних робіт. 1 k 2 k 3 1 k 2 k 3 Поставлена задача вирішується за рахунок то(i), y(i) і x( j), y( j) - координати точок на iде x го, що у відомому способі, що включає викорисk k k k тання декількох знімків, виконаних з однієї точки том та j-том знімках відповідно; простору шляхом повороту камери в горизонталь( j) ( j) ( j) ному і вертикальному напрямках відповідно до - направляючі a(i), a(i),...c(i) і a , a ,...c 1 2 3 1 2 3 корисної моделі поєднують в еквівалентне панокосинуси відповідно i-того та j-того знімків, обчисрамне зображення на підставі точок, розташовалені по їх кутах повороту відносно осей панорамних в областях перекриття суміжних знімків на ного знімка. підставі вираження: Такі рівняння, складалися для всіх пар відпо( j) ( j) ( j) ( j) ( j) відних точок у зонах перекриття знімків однієї груa(i)x(i) a(i)y(i) a(i)f a x a y a f 2 k 3 2 k 3 f 1 k f 1 k 0 пи. Після лінеаризації рівнянь була отримана сис(i)x(i) c(i)y(i) C(i)f ( j) ( j) ( j) ( j) ( j) c c x c y c f тема лінійних рівнянь, яку можна записати як 1 k 2 k 3 1 k 2 k 3 ( j) ( j) ( j) ( j) ( j) (i)x(i) b(i)y(i) b(i)f AT A AT L 0 , b b x b y b f 2 k 3 2 k 3 f 1 k f 1 k 0 ( j) ( j) ( j) ( j) ( j) де А - матриця коефіцієнтів складених рівнянь; c(i)x(i) c(i)y(i) c(i)f c x c y c f 1 k 2 k 3 1 k 2 k 3 АT - транспонована матриця коефіцієнтів; (i), y(i) і x( j), y( j) - координати точок на i- вектор-стовпець поправок в кутові елеменде x k k k k ти орієнтування знімків в групі; том та j-том знімках відповідно; L - вектор вільних членів. ( j) ( j) ( j) Система рівнянь вирішувалася методом най- направляючі a(i), a(i),...c(i) і a , a ,...c 1 2 3 1 2 3 менших квадратів при виконанні умови косинуси відповідно i-того та j-того знімків, обчисT =min. лені по їх кутах повороту відносно осей панорамОтримане рішення є кути нахилу всіх знімків ного знімка, причому необхідно наявність не менш групи відносно панорамного знімка. Іншими слооднієї камери. вами при рішенні системи рівнянь було знайдено Зазначені ознаки складають суть корисної мотаке положення панорамного знімка, при якому 5 19565 6 кути нахилу всіх знімків групи щодо нього були фотографування і кути нахилу кожного панорамномінімальними. По отриманих кутах нахилу знімків у го знімка в геодезичній системі координат (у сисгрупі на підставі алгоритму зворотного трансфортемі координат жорстких пунктів). Це дало можлимування будувалося кінцеве панорамне зобравість оцінити точність сформованих панорамних ження. Тобто для кожного пікселя на панорамному зображень. зображенні знаходилося його колірне значення на Приклад 2. вихідних знімках. Для другої групи знімків був виПри фотографуванні об'єкта гірських робіт 4 конаний такий же набір операцій. У підсумку викобуло досить виконати по трьох знімка з кожної точнання процесу обробки було отримано два паноки для його повного покриття. Для дослідження рамних зображення 8 і 9, відповідно для лівої 3 і точності панорамних зображень у залежності від правої 4 точок фотографування. Подальша обробкількості вхідних у них знімків було виконане нака велася зі стереопарою - двома панорамними ступне. З кожної точки фотографування було знязображеннями. У системі координат кожного з них то по 25 знімків. Обробка виконувалася аналогічно вимірялися координати опорних точок 10 - жорстко приведеної в прикладі 1 схемі. Мірою точності визакріплені на поверхні об'єкта, що знімається, пунступало фактичне відхилення координат опорних кти, геодезичні координати яких визначені заздапунктів від координат цих же пунктів, переобчислегідь з достатньою точністю. Для отриманих вилених у геодезичну систему після виміру на паномірів складалися рівняння коллінеарності. Після рамнім зображенні. Для оцінки в більшості викориїхньої лінеаризації була отримана система рівстовувалися точки, що потрапили на краї нянь, рішення якої було виконано параметричним панорамних зображень. Результати оцінки точносспособом на підставі методу найменших квадраті показані в таблиці 1. тів. У результаті були отримані координати точок Таблиця 1 Залежність точності координат на панорамному зображенні від кількості використовуваних знімків Знімків по горизон- Знімків по верти- Фактич. відхил. на краю талі калі панор. знімка 1 2 3 4 № 1 2 2 9-12 см 2 3 2 до 15 см 3 2 3 до 14 см 4 3 3 до 16см 5 4 4 30-40 см 6 5 5 не більш 2 м Таким чином, у результаті ведення наземної фотограмметричної зйомки за допомогою запропонованого способу можна скоротити кількість точок фотографування і при цьому цілком покрити знімками об'єкт, що знімається. Використання панорамних знімків дозволяє виконувати зйомку при Примітка 5 Висока точність, але незначне збільшення кута поля зору Схема придатна для зйомки горизонтально витягнутих об'єктів Схема придатна для зйомки вертикально витягнутих об'єктів Максимальний розмір кута поля зору в обох напрямках. Оптимальне значення співвідношення кута поля зору і точності координат Невисока точність при великому куті поля зору, може застосовуватися для таких видів робіт, де не потрібна висока точність. Великі значення помилок. В геодезичному і маркшейдерському виробництві застосовуватися не може. максимальному значенні фокусної відстані камери, тобто, коли вплив помилок, викликаних оптичною дісторсією об'єктива, стає мінімальним. Скорочення кількості точок фотографування дозволяє в камеральних умовах скоротити необхідний час для їхньої математичної обробки. 7 Комп’ютерна верстка А. Крижанівський 19565 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for forming a panoramic photogrammetric picture
Автори англійськоюLuniov Andrii Oleksandrovych, Mohylnyi Serhii Heorhiiovych
Назва патенту російськоюСпособ создания панорамного фотограмметрического изображения
Автори російськоюЛунев Андрей Александрович, Могильный Сергей Георгиевич
МПК / Мітки
МПК: G03B 37/00
Мітки: фотограмметричного, зображення, побудови, панорамного, спосіб
Код посилання
<a href="https://ua.patents.su/4-19565-sposib-pobudovi-panoramnogo-fotogrammetrichnogo-zobrazhennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб побудови панорамного фотограмметричного зображення</a>
Спосіб повороту вікна зображення та пристрій для його реалізації
Номер патенту: 33248
Опубліковано: 15.02.2001
Автор: Романюк Олександр Никифорович
МПК: G09G 1/16
Мітки: повороту, вікна, пристрій, реалізації, спосіб, зображення
Текст:
...(З.Л. Рабинович, В.А. Рама,наускас. Типовые операции в вычислительных машинах. К.» Техніка, 1980, с 215-216 - аналог). Спосіб має низьку швидкодію, яка обумовлена тим, що нові координати однієї точки зображення обчислюються послідовно для обох координат за п тактів, що складе загальний час обчислень, рівний тривалості 2-п тактів, а також апаратна складність реалізації даного способу, яка заключаемся в необхідності спеціального...
Пристрій для визначення просторового зміщення зображення об’єкту по відношенню до еталону зображення
Номер патенту: 30433
Опубліковано: 15.11.2000
Автори: Рожков Сергій Олександрович, Бражник Олександр Михайлович, Тернова Тетяна Іванівна, Тимофеєв Констянтин Васильович, Храпливий Анатолій Петрович
Мітки: відношенню, пристрій, зміщення, зображення, визначення, просторового, еталону, об'єкту
Формула / Реферат:
1. Пристрій для визначення просторового зміщення зображення об'єкту по відношенню до еталону зображення, що містить послідовно розташовані прилад для знімання інформації, прилад для зберігання еталону, перетворювач Фур'є і прилад для обчислення кореляційної функції, відрізняючий тим, що він додатково містить два смугових фільтра, входи яких електрично зв'язані з перетворювачем сигналу зображення і сигналу еталону відповідно, а виходи...
Спосіб повороту зображення на екрані матричного індикатора на заданий кут
Номер патенту: 12866
Опубліковано: 15.03.2006
Автори: Маліночка Ольга Вікторівна, Хейреддин Самі Важих, Кожем'яко Володимир Прокопович, Тимченко Леонід Іванович
Мітки: повороту, кут, екрані, матричного, заданій, індикатора, зображення, спосіб
Формула / Реферат:
Спосіб повороту зображення на екрані матричного індикатора на заданий кут , який полягає у тому, що формують сигнали координат точкових елементів зображення і перетворюють їх у світлові сигнали, який відрізняється тим, що зображення повертають на елементарний кут шляхом фотоелектричного перетворення...
Спосіб отримання зображення вологого анатомічного препарату для демонстрації
Номер патенту: 10080
Опубліковано: 15.11.2005
Автори: Гайдар Еліна Йосипівна, Цибаровська Марта Миколаївна, Ільїн Ігор Іванович
МПК: A61M 5/00, G01N 33/00
Мітки: анатомічного, препарату, зображення, отримання, спосіб, демонстрації, вологого
Формула / Реферат:
Спосіб отримання зображення вологого анатомічного препарату для демонстрації, що включає його фотографування, який відрізняється тим, що здійснюють фотографування цифровим фотоапаратом, після чого отриману інформацію у вигляді файла уводять у комп'ютер та копіюють на жорсткий диск, отриманий знімок обробляють за графічною програмою, друкують отримане зображення на спеціальну плівку для кодограми та демонструють кодограму на екран.
Спосіб повороту зображення зі збереженням об’єму інформації
Номер патенту: 35189
Опубліковано: 15.03.2001
Автори: Лисенко Геннадій Леонідович, Суприган Віталій Анатолійович, Карпунь Вячеслав Анатолійович
МПК: G06F 15/76, G06K 9/36
Мітки: збереженням, інформації, об'єму, повороту, спосіб, зображення
Формула / Реферат:
Спосіб повороту зображення зі збереженням об'єму інформації, який полягає в формуванні сигналів координат точкових елементів зображення, зсуві рядків та стовпчиків в горизонтальному та вертикальному напрямках, який відрізняється тим, що початкове зображення записують в матричний індикатор, після чого рядки зображення зсувають по горизонтальній вісі з переносом елементів, на значення пропорційне куту повороту та номеру рядка, а стовпчики...
Попередній патент: Спосіб заміщення дефекту трубчастої кістки
Наступний патент: Система подачі палива для двигуна
Випадковий патент: Спосіб консервативного внутрішньозубного лікування міжкореневого періодонтиту багатокореневого зуба