Спосіб повороту зображення на екрані матричного індикатора на заданий кут
Номер патенту: 12866
Опубліковано: 15.03.2006
Автори: Хейреддин Самі Важих, Тимченко Леонід Іванович, Маліночка Ольга Вікторівна, Кожем'яко Володимир Прокопович

Формула / Реферат
Спосіб повороту зображення на екрані матричного індикатора на заданий кут ![]() , який полягає у тому, що формують сигнали координат точкових елементів зображення і перетворюють їх у світлові сигнали, який відрізняється тим, що зображення повертають на елементарний кут
, який полягає у тому, що формують сигнали координат точкових елементів зображення і перетворюють їх у світлові сигнали, який відрізняється тим, що зображення повертають на елементарний кут ![]() шляхом фотоелектричного перетворення світлових сигналів у сигнали координат точкових елементів зображення за допомогою фотоелектричної матриці, поверненої щодо екрана матричного індикатора зображення на кут
шляхом фотоелектричного перетворення світлових сигналів у сигнали координат точкових елементів зображення за допомогою фотоелектричної матриці, поверненої щодо екрана матричного індикатора зображення на кут ![]() , фіксують сигнали координат точкових елементів зображення, формують імпульс кінця повороту на кут
, фіксують сигнали координат точкових елементів зображення, формують імпульс кінця повороту на кут ![]() , підсумовують згадані імпульси і при рівності кількості підсумованих імпульсів числу
, підсумовують згадані імпульси і при рівності кількості підсумованих імпульсів числу ![]() завершують поворот зображення.
завершують поворот зображення.
Текст
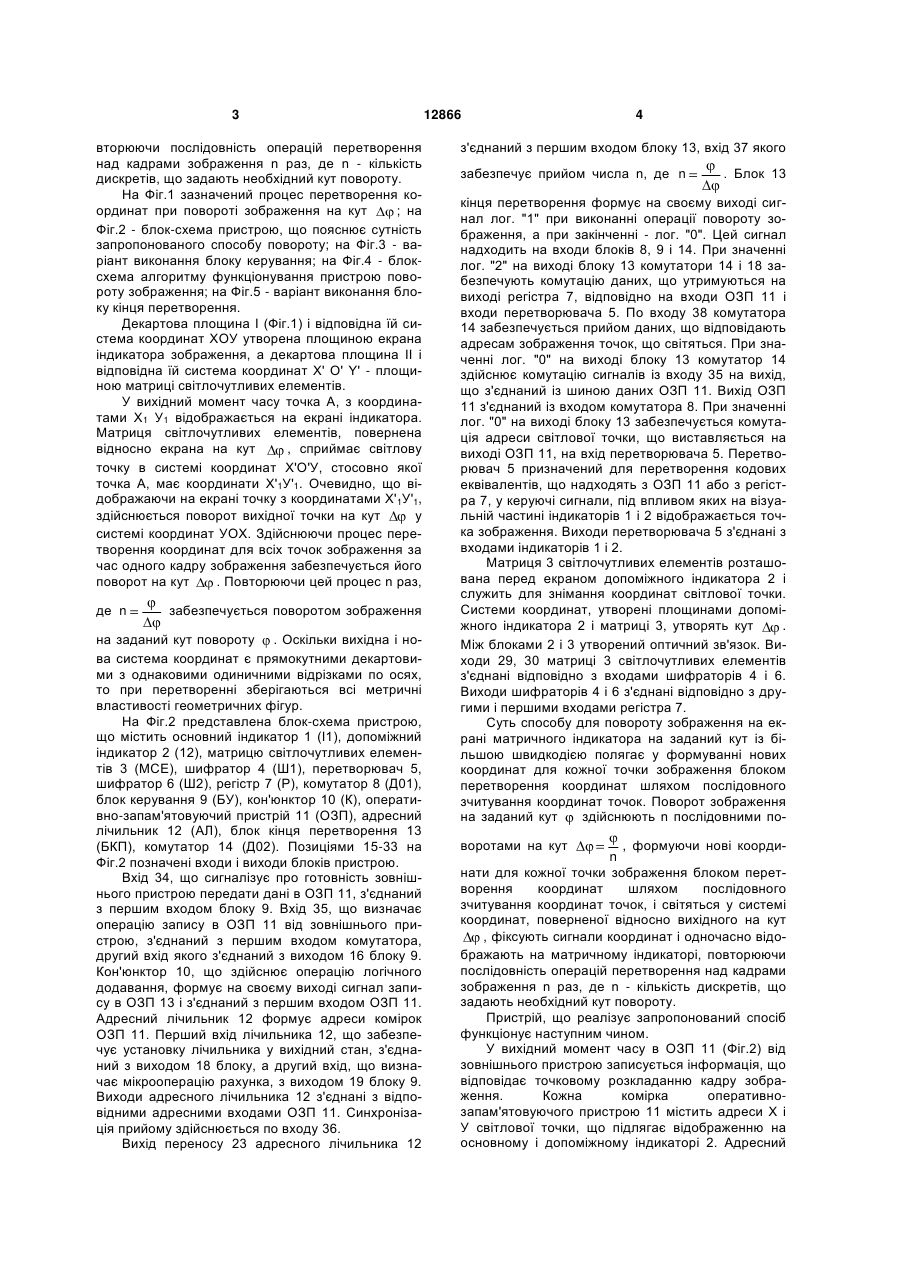
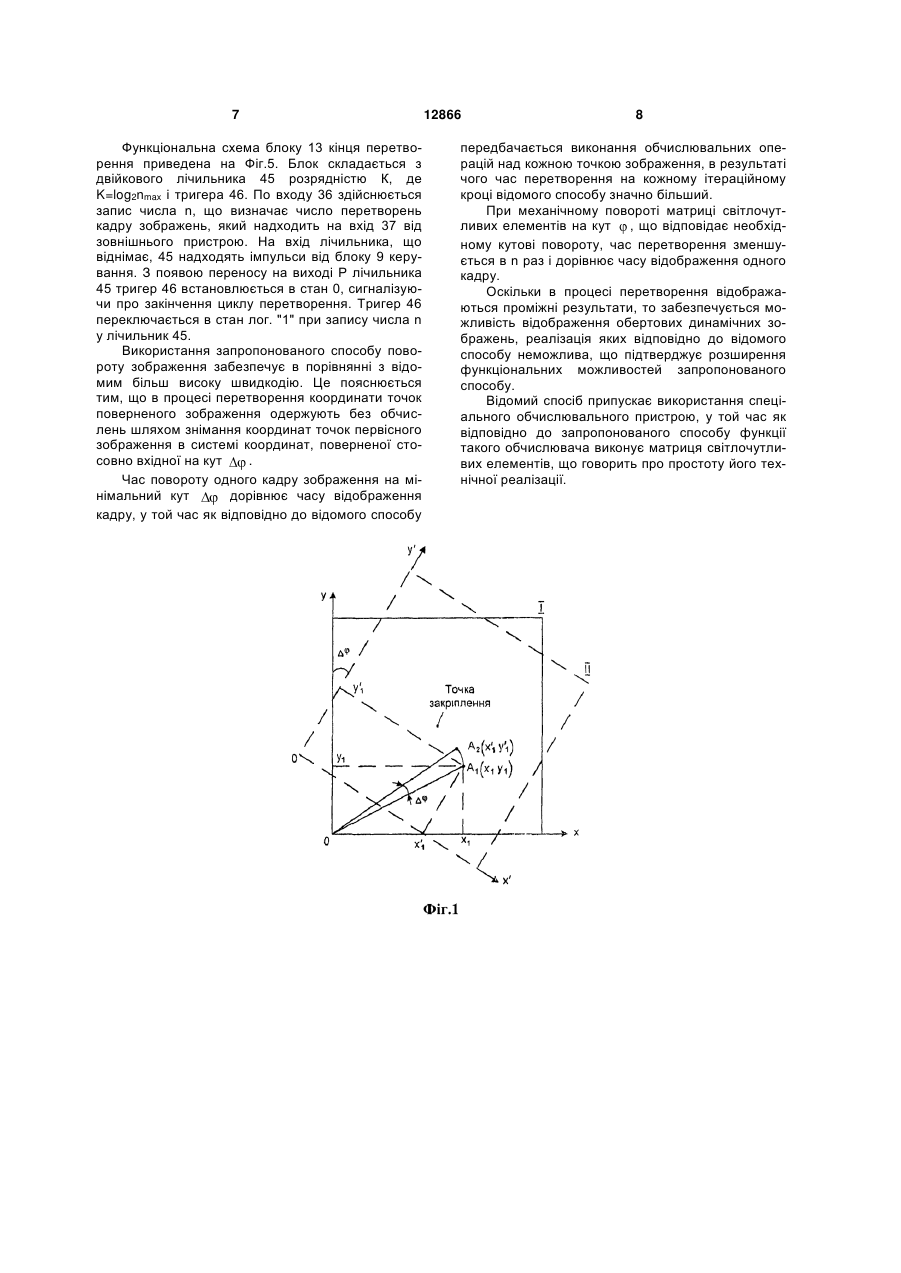
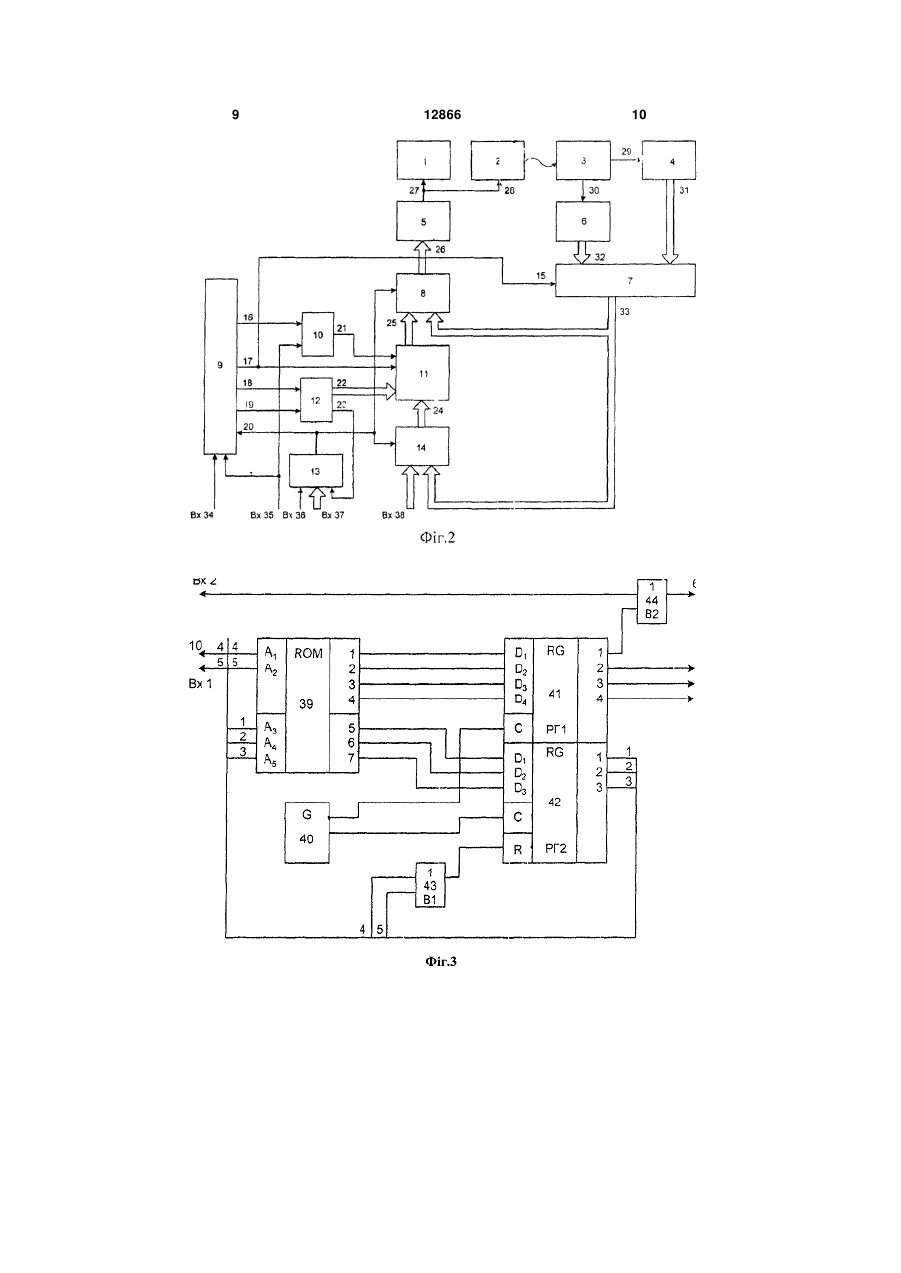
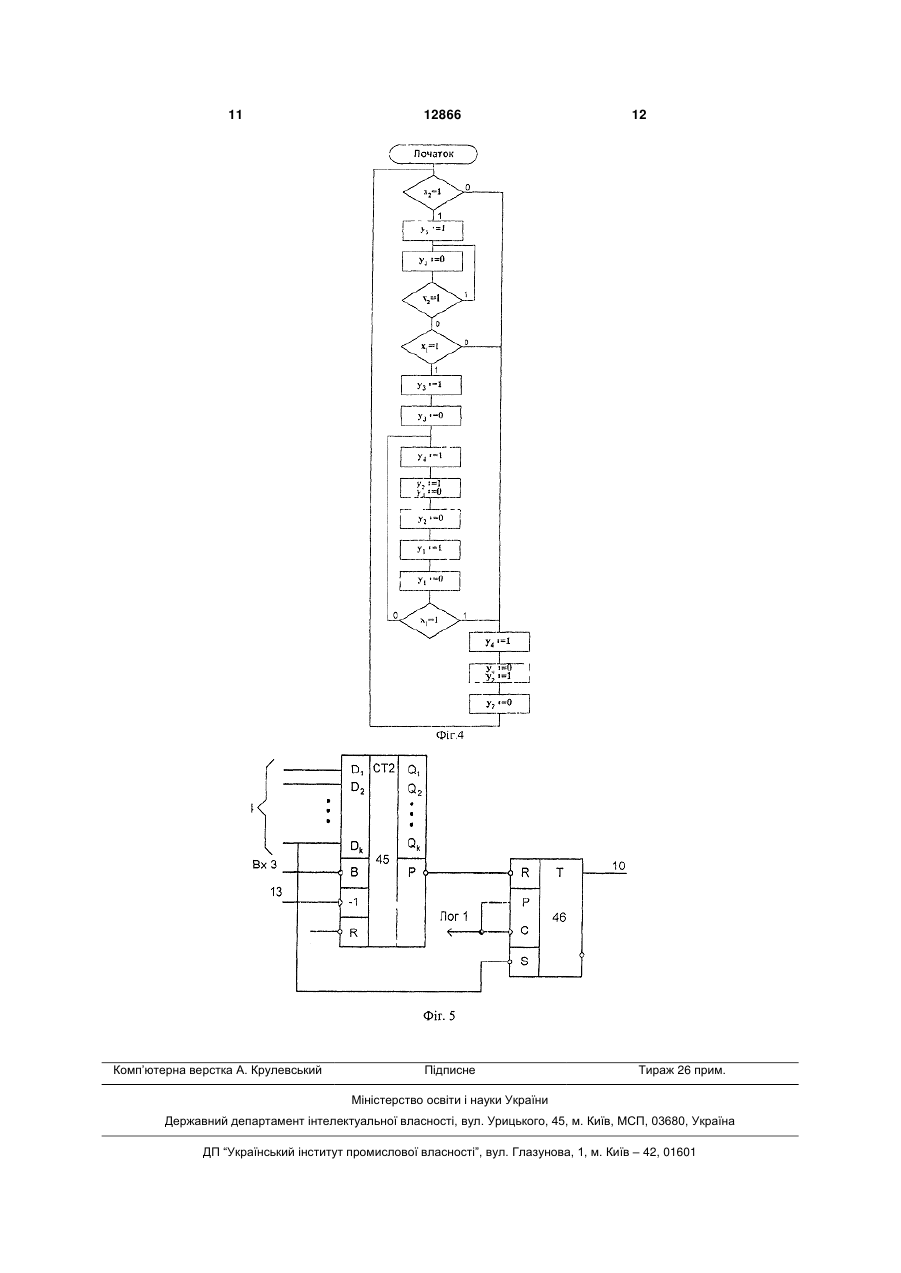
Спосіб повороту зображення на екрані матричного індикатора на заданий кут , який полягає у тому, що формують сигнали координат точкових елементів зображення і перетворюють їх у світлові сигнали, який відрізняється тим, що зображення повертають на елементарний кут шляхом фотоелектричного перетворення світлових сигналів у сигнали координат точкових елементів зображення за допомогою фотоелектричної матриці, поверненої щодо екрана матричного індикатора зображення на кут , фіксують сигнали координат точкових елементів зображення, формують імпульс кінця повороту на кут , підсумовують згадані імпульси і при рівності кількості підсумова Корисна модель відноситься до автоматики й обчислювальної техніки і може бути використана для створення пристроїв відображення інформації в різноманітних логічних, керуючих, програмних обчислювальних пристроях та системах автоматики в залізничному транспорті. Відомий спосіб повороту зображення [Функциональные элементы и устройства оптоэлектроники: Навч. посібник / В.П. Кожем'яко, Л.І. Тимченко, Г.Л. Лисенко, Ю.Ф. Кутаєв. - К.: УМК ВО, 1990, с. 193-194], який ґрунтується на тому, що із матричного індикатору (МІ) зображення повністю зсувається в буфер. Після проходження буферу зображення записується в МІ в тому напрямку, в залежності в яку сторону необхідно повернути зображення. Недоліками даного способу є низька швидкодія та складність пристрою, який його реалізує через використання буферу. Відомий спосіб повороту зображення [заявка Японії №61-221881, МКИ G06F 15/72. Опубл. 02.10.86, Изобретения стран мира, 1988, №11], оснований на зсуві рядків на значення тангенсу кута повороту та масштабування з коефіцієнтом, який дорівнює значенню косинуса кута повороту, повертають зображення на 90° та виконується попередня процедура, після цього зображення повертають на 90° з метою компенсації. Недоліками цього способу є низька швидкодія. Найбільш близьким до запропонованого спо собу є спосіб повороту зображення, [патент України №35189, МКИ G06K 9/36. Опубл. 15.03.2001, Бюл. №2, 2001 р.], оснований на формуванні сигналів координат точкових елементів зображення, зсуві рядків та стовпчиків в горизонтальному та вертикальному напрямках, де початкове зображення записують у матричний індикатор, рядки зображення зсувають по горизонтальній вісі з переносом елементів, на значення пропорційне куту повороту та номеру стовпчика, при цьому поворот зображення закінчують зсувом рядків зображення на значення кута повороту та номеру рядка з переносом елементів. Недоліками способу є низька швидкодія. В основу корисної моделі поставлена задача створення способу для повороту зображення на екрані із більшою швидкодією за рахунок формування нових координат для кожної точки зображення блоком перетворення координат шляхом послідовного зчитування координат точок. Поставлена задача досягається тим, що поворот зображення на заданий кут здійснюють n них імпульсів числу n завершують поворот послідовними поворотами на кут , формуn ючи нові координати для кожної точки зображення блоком перетворення координат шляхом послідовного зчитування координат точок, і світяться у системі координат, поверненої відносно вихідного на кут , фіксують сигнали координат і одночасно відображають на матричному індикаторі, по (19) UA (11) 12866 (13) U зображення. 3 вторюючи послідовність операцій перетворення над кадрами зображення n раз, де n - кількість дискретів, що задають необхідний кут повороту. На Фіг.1 зазначений процес перетворення координат при повороті зображення на кут ; на Фіг.2 - блок-схема пристрою, що пояснює сутність запропонованого способу повороту; на Фіг.3 - варіант виконання блоку керування; на Фіг.4 - блоксхема алгоритму функціонування пристрою повороту зображення; на Фіг.5 - варіант виконання блоку кінця перетворення. Декартова площина І (Фіг.1) і відповідна їй система координат ХОУ утворена площиною екрана індикатора зображення, а декартова площина II і відповідна їй система координат X' О' Y' - площиною матриці світлочутливих елементів. У вихідний момент часу точка А, з координатами Х1 У1 відображається на екрані індикатора. Матриця світлочутливих елементів, повернена відносно екрана на кут , сприймає світлову точку в системі координат Х'О'У, стосовно якої точка А, має координати Х'1У'1. Очевидно, що відображаючи на екрані точку з координатами Х'1У'1, здійснюється поворот вихідної точки на кут у системі координат УОХ. Здійснюючи процес перетворення координат для всіх точок зображення за час одного кадру зображення забезпечується його поворот на кут . Повторюючи цей процес n раз, де n забезпечується поворотом зображення на заданий кут повороту . Оскільки вихідна і нова система координат є прямокутними декартовими з однаковими одиничними відрізками по осях, то при перетворенні зберігаються всі метричні властивості геометричних фігур. На Фіг.2 представлена блок-схема пристрою, що містить основний індикатор 1 (I1), допоміжний індикатор 2 (12), матрицю світлочутливих елементів 3 (МСЕ), шифратор 4 (Ш1), перетворювач 5, шифратор 6 (Ш2), регістр 7 (Р), комутатор 8 (Д01), блок керування 9 (БУ), кон'юнктор 10 (К), оперативно-запам'ятовуючий пристрій 11 (ОЗП), адресний лічильник 12 (АЛ), блок кінця перетворення 13 (БКП), комутатор 14 (Д02). Позиціями 15-33 на Фіг.2 позначені входи і виходи блоків пристрою. Вхід 34, що сигналізує про готовність зовнішнього пристрою передати дані в ОЗП 11, з'єднаний з першим входом блоку 9. Вхід 35, що визначає операцію запису в ОЗП 11 від зовнішнього пристрою, з'єднаний з першим входом комутатора, другий вхід якого з'єднаний з виходом 16 блоку 9. Кон'юнктор 10, що здійснює операцію логічного додавання, формує на своєму виході сигнал запису в ОЗП 13 і з'єднаний з першим входом ОЗП 11. Адресний лічильник 12 формує адреси комірок ОЗП 11. Перший вхід лічильника 12, що забезпечує установку лічильника у вихідний стан, з'єднаний з виходом 18 блоку, а другий вхід, що визначає мікрооперацію рахунка, з виходом 19 блоку 9. Виходи адресного лічильника 12 з'єднані з відповідними адресними входами ОЗП 11. Синхронізація прийому здійснюється по входу 36. Вихід переносу 23 адресного лічильника 12 12866 4 з'єднаний з першим входом блоку 13, вхід 37 якого забезпечує прийом числа n, де n . Блок 13 кінця перетворення формує на своєму виході сигнал лог. "1" при виконанні операції повороту зображення, а при закінченні - лог. "0". Цей сигнал надходить на входи блоків 8, 9 і 14. При значенні лог. "2" на виході блоку 13 комутатори 14 і 18 забезпечують комутацію даних, що утримуються на виході регістра 7, відповідно на входи ОЗП 11 і входи перетворювача 5. По входу 38 комутатора 14 забезпечується прийом даних, що відповідають адресам зображення точок, що світяться. При значенні лог. "0" на виході блоку 13 комутатор 14 здійснює комутацію сигналів із входу 35 на вихід, що з'єднаний із шиною даних ОЗП 11. Вихід ОЗП 11 з'єднаний із входом комутатора 8. При значенні лог. "0" на виході блоку 13 забезпечується комутація адреси світлової точки, що виставляється на виході ОЗП 11, на вхід перетворювача 5. Перетворювач 5 призначений для перетворення кодових еквівалентів, що надходять з ОЗП 11 або з регістра 7, у керуючі сигнали, під впливом яких на візуальній частині індикаторів 1 і 2 відображається точка зображення. Виходи перетворювача 5 з'єднані з входами індикаторів 1 і 2. Матриця 3 світлочутливих елементів розташована перед екраном допоміжного індикатора 2 і служить для знімання координат світлової точки. Системи координат, утворені площинами допоміжного індикатора 2 і матриці 3, утворять кут . Між блоками 2 і 3 утворений оптичний зв'язок. Виходи 29, 30 матриці 3 світлочутливих елементів з'єднані відповідно з входами шифраторів 4 і 6. Виходи шифраторів 4 і 6 з'єднані відповідно з другими і першими входами регістра 7. Суть способу для повороту зображення на екрані матричного індикатора на заданий кут із більшою швидкодією полягає у формуванні нових координат для кожної точки зображення блоком перетворення координат шляхом послідовного зчитування координат точок. Поворот зображення на заданий кут здійснюють n послідовними поворотами на кут , формуючи нові коордиn нати для кожної точки зображення блоком перетворення координат шляхом послідовного зчитування координат точок, і світяться у системі координат, поверненої відносно вихідного на кут , фіксують сигнали координат і одночасно відображають на матричному індикаторі, повторюючи послідовність операцій перетворення над кадрами зображення n раз, де n - кількість дискретів, що задають необхідний кут повороту. Пристрій, що реалізує запропонований спосіб функціонує наступним чином. У вихідний момент часу в ОЗП 11 (Фіг.2) від зовнішнього пристрою записується інформація, що відповідає точковому розкладанню кадру зображення. Кожна комірка оперативнозапам'ятовуючого пристрою 11 містить адреси Х і У світлової точки, що підлягає відображенню на основному і допоміжному індикаторі 2. Адресний 5 12866 лічильник 12 здійснює послідовний перебір адрес ОЗП 11. Забезпечуючи читання даних по ОЗП 11 по адресах, що задаються адресним лічильником 12, здійснюється відображення кадру зображення. При необхідності повороту зображення від зовнішнього пристрою здійснюється передача числа n, що визначає кількість дискретів, які задають необхідний кут повороту . На виході блоку 13 кінця перетворення з'являється рівень лог. "1". Точка, що світиться і відображається на індикаторах 1 і 2, сприймається матрицею 3 світлочутливих елементів, осі координат якої утворюють нову систему координат, повернену стосовно вихідній, утвореній екраном допоміжного індикатора, на кут . Двійкові коди координат Х і У світлової точки, отримані після шифрації відповідно блоками 6 і 4, запам'ятовуються по відповідному сигналі блоку 9 керування в регістрі 7. Ці координати через комутатор 8 надходять на вхід перетворювача 5, що формує керуючі сигнали, під впливом яких забезпечується відображення точки на екранах індикаторів 1 і 2. Ці ж координати через комутатор 2 надходять на шину даних ОЗП 11 і записуються в комірці, що відповідає вихідній точці зображення, тобто за адресою, що задається в даний момент часу адресним лічильником 12. Повторюючи описаний процес для всіх точок вихідного зображення, забезпечується відображення на індикаторах 1 6 і 2, поверненого на кут вихідного зображення. В ОЗП 11 зберігаються координати точок поверненого зображення, оскільки в кожному такті перетворення вихідні координати замінюються координатами поверненої на кут точки. Час повороту кадру зображення на кут визначається часом відображення вихідного кадру. Повторюючи процес повороту кадру зображення на кут n раз, забезпечується поворот вихідного зображення на кут . n Після повороту вихідного зображення на кут на виході блоку 13 з'являється рівень лог. "0", після чого здійснюється регенерація зображення, координати точок якого записані після перетворення в ОЗП 11. Допоміжний індикатор 2 повторює інформацію основного індикатора і виконується значно менших розмірів у порівнянні з основним. Можливе розміщення матриці світлочутливих елементів безпосередньо перед основним індикатором. У цьому випадку допоміжний індикатор зі схеми виключається, але при цьому необхідно забезпечити прозорість світлочутливої матриці. Один з можливих варіантів реалізації, блоку 9 керування приведений на Фіг.3. Необхідні для керування функціонуванням пристрою керуючі й умовні сигнали приведені в табл. 1. Таблиця 1 Номер зв'язку 16 17 18 19 20 Bx. 34 Позначення зв'язку У1 У2 У3 У4 X1 Х2 Найменування сигналу Запис в ОЗУ Читання з ОЗУ Скидання AC AC-AC+1 Сигнал кінця перетворення Сигнал готовності зовнішнього пристрою Алгоритм формування пропонованого пристрою приведений на Фіг.4. Вміст постійного запам'ятовуючого пристрою (ПЗП) блоку 9 керування, складений відповідно до алгоритму функціонування, приведений в табл. 2. Таблиця 2 А 0 0 0 1 1 1 1 1 1 0 0 0 Адреса A 0 0 0 0 0 0 0 0 0 1 1 1 A 0 1 0 0 1 0 0 1 0 0 1 0 A 0 0 1 0 0 1 0 0 1 0 0 1 ПЗП A 0 0 0 0 0 0 1 1 1 0 0 0 1 0 0 0 0 0 0 0 1 0 0 0 0 Блок 9 керування, представлений на Фіг.3 складається з ПЗП 39, генератора 40 тактових 2 0 1 0 0 0 0 0 0 0 0 0 0 Вміст 3 0 0 0 1 0 0 0 0 0 1 0 0 4 1 0 0 0 0 1 0 0 0 0 0 0 5 1 0 0 1 0 1 1 0 0 1 0 0 ПЗП 6 0 1 0 0 1 I 0 1 0 0 1 1 7 0 0 0 0 0 0 1 1 0 0 0 0 імпульсів, двох регістрів 41 і 42 і елементів АБО 43 і 44. 7 Функціональна схема блоку 13 кінця перетворення приведена на Фіг.5. Блок складається з двійкового лічильника 45 розрядністю К, де K=log2nmax і тригера 46. По входу 36 здійснюється запис числа n, що визначає число перетворень кадру зображень, який надходить на вхід 37 від зовнішнього пристрою. На вхід лічильника, що віднімає, 45 надходять імпульси від блоку 9 керування. З появою переносу на виході Р лічильника 45 тригер 46 встановлюється в стан 0, сигналізуючи про закінчення циклу перетворення. Тригер 46 переключається в стан лог. "1" при запису числа n у лічильник 45. Використання запропонованого способу повороту зображення забезпечує в порівнянні з відомим більш високу швидкодію. Це пояснюється тим, що в процесі перетворення координати точок поверненого зображення одержують без обчислень шляхом знімання координат точок первісного зображення в системі координат, поверненої стосовно вхідної на кут . Час повороту одного кадру зображення на мінімальний кут дорівнює часу відображення кадру, у той час як відповідно до відомого способу 12866 8 передбачається виконання обчислювальних операцій над кожною точкою зображення, в результаті чого час перетворення на кожному ітераційному кроці відомого способу значно більший. При механічному повороті матриці світлочутливих елементів на кут , що відповідає необхідному кутові повороту, час перетворення зменшується в n раз і дорівнює часу відображення одного кадру. Оскільки в процесі перетворення відображаються проміжні результати, то забезпечується можливість відображення обертових динамічних зображень, реалізація яких відповідно до відомого способу неможлива, що підтверджує розширення функціональних можливостей запропонованого способу. Відомий спосіб припускає використання спеціального обчислювального пристрою, у той час як відповідно до запропонованого способу функції такого обчислювача виконує матриця світлочутливих елементів, що говорить про простоту його технічної реалізації. 9 12866 10 11 Комп’ютерна верстка А. Крулевський 12866 Підписне 12 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for rotating image at a matrix display screen at a specified angle
Автори англійськоюKozhemiako Volodymyr Prokopovych, Tymchenko Leonid Ivanovych
Назва патенту російськоюСпособ поворота изображения на экране матричного индикатора на заданный угол
Автори російськоюКожемяко Владимир Прокофьевич, Тымченко Леонид Иванович
МПК / Мітки
Мітки: екрані, матричного, зображення, кут, заданій, спосіб, індикатора, повороту
Код посилання
<a href="https://ua.patents.su/6-12866-sposib-povorotu-zobrazhennya-na-ekrani-matrichnogo-indikatora-na-zadanijj-kut.html" target="_blank" rel="follow" title="База патентів України">Спосіб повороту зображення на екрані матричного індикатора на заданий кут</a>
Спосіб повороту вікна зображення та пристрій для його реалізації
Номер патенту: 33248
Опубліковано: 15.02.2001
Автор: Романюк Олександр Никифорович
МПК: G09G 1/16
Мітки: зображення, вікна, повороту, пристрій, спосіб, реалізації
Текст:
...(З.Л. Рабинович, В.А. Рама,наускас. Типовые операции в вычислительных машинах. К.» Техніка, 1980, с 215-216 - аналог). Спосіб має низьку швидкодію, яка обумовлена тим, що нові координати однієї точки зображення обчислюються послідовно для обох координат за п тактів, що складе загальний час обчислень, рівний тривалості 2-п тактів, а також апаратна складність реалізації даного способу, яка заключаемся в необхідності спеціального...
Спосіб повороту зображення зі збереженням об’єму інформації
Номер патенту: 35189
Опубліковано: 15.03.2001
Автори: Лисенко Геннадій Леонідович, Карпунь Вячеслав Анатолійович, Суприган Віталій Анатолійович
МПК: G06F 15/76, G06K 9/36
Мітки: зображення, об'єму, спосіб, інформації, повороту, збереженням
Формула / Реферат:
Спосіб повороту зображення зі збереженням об'єму інформації, який полягає в формуванні сигналів координат точкових елементів зображення, зсуві рядків та стовпчиків в горизонтальному та вертикальному напрямках, який відрізняється тим, що початкове зображення записують в матричний індикатор, після чого рядки зображення зсувають по горизонтальній вісі з переносом елементів, на значення пропорційне куту повороту та номеру рядка, а стовпчики...
Механізм повороту стола на заданий кут
Номер патенту: 18799
Опубліковано: 25.12.1997
Автори: Перель Світлана Петрівна, Перель Петро Ізраілевич
МПК: F16H 21/00
Мітки: заданій, кут, стола, повороту, механізм
Формула / Реферат:
1. Механизм поворота стола на заданный угол, содержащий основание, привод, шарнирно установленный на основании, стол, связанный с приводом при помощи оси и установленный на основании с возможностью поворота вокруг нее, ведущее звено, шарнирно соединенное с приводом и одним концом шарнирно связанное с основанием, ведомое звено, одним концом шарнирно связанное с осью поворота стола, а другим - шарнирно связанное со свободным концом ведущего...
Пристрій для повороту зображень на екрані растрового графічного дисплею
Номер патенту: 21438
Опубліковано: 02.12.1997
Автори: Зорі Сергій Анатолійович, Башков Євген Олександрович
МПК: G06F 15/00, G06K 9/36
Мітки: растрового, пристрій, дисплею, екрані, графічного, повороту, зображень
Формула / Реферат:
Устройство для поворота изображения на экране растрового графического индикатора, содержащее первый регистр, информационный вход которого соединен с первой входной шиной устройства, второй коммутатор, вход которого соединен с информационным выходом первого регистра, третий коммутатор, вход которого соединен со второй входной шиной устройства, четвертый счетчик, пятый преобразователь, шестой растровый графический индикатор, седьмой блок...
Модуль пристрою для відтворення зображення на великому екрані
Номер патенту: 14808
Опубліковано: 18.02.1997
Автори: Бойван Анатолій Васильович, Дорощенков Генадій Дмитрович, Кожем'яко Володимир Прокопович
МПК: H04N 5/66
Мітки: модуль, екрані, великому, пристрою, відтворення, зображення
Формула / Реферат:
1. Модуль устройства для воспроизведения изображения на большом экране, содержащий два блока памяти и блок отображения в виде матрицы, анодные и катодные входы которой подключены соответственно к выходам блока анодной и блока катодной развертки, отличающийся тем, что он дополнительно содержит два контроллера блоков памяти, коммутатор - мультиплексор и блок тактовых и управляющих сигналов, тактовый выход которого подключен к тактовым входам...
Попередній патент: Інтегральний світлодіод
Наступний патент: Антифрикційний композиційний матеріал “триболіт”
Випадковий патент: Різальний інструмент