Пристрій контролю і діагностики системи обробки цифрової інформації, що функціонує в модулярній арифметиці
Номер патенту: 24547
Опубліковано: 10.07.2007
Автори: Ілюшко Ярослав Вікторович, Краснобаєв Віктор Анатолійович, Ілюшко Віктор Михайлович, Хері Алі Абдуллах, Зефірова Ольга Володимирівна


Формула / Реферат
Пристрій контролю і діагностики системи обробки цифрової інформації, що функціонує в модулярній арифметиці, що містить блок обнуління, віднімач в модулярній арифметиці, блок аналізу, блок перетворення значення ![]() з модулярної арифметики в позиційний двійковий код, блок пам'яті, при цьому вхід блока обнуління є входом пристрою, а вихід блока обнуління підключено до входу блока аналізу та до першого входу віднімача в модулярній арифметиці, до другого входу якого підключено вхід пристрою, а вихід віднімача в модулярній арифметиці підключено до входу блока перетворення значення
з модулярної арифметики в позиційний двійковий код, блок пам'яті, при цьому вхід блока обнуління є входом пристрою, а вихід блока обнуління підключено до входу блока аналізу та до першого входу віднімача в модулярній арифметиці, до другого входу якого підключено вхід пристрою, а вихід віднімача в модулярній арифметиці підключено до входу блока перетворення значення ![]() з модулярної арифметики в позиційний двійковий код, перший вихід блока аналізу є виходом ознаки γn+1=0, який відрізняється тим, що введено перший інвертор по модулю γn+1 (де у γn+1 - значення залишку по модулю mn+1 системи залишкових класів) і другий інвертор по модулю М-1 (M = m1*m2...mn), при цьому другий вихід блока аналізу підключено до першого входу першого інвертора, до другого входу якого підключено шину константи mn+1, а вихід якого підключено до першого входу блока пам'яті, вихід якого є виходом пристрою, а вихід блока перетворення значення
з модулярної арифметики в позиційний двійковий код, перший вихід блока аналізу є виходом ознаки γn+1=0, який відрізняється тим, що введено перший інвертор по модулю γn+1 (де у γn+1 - значення залишку по модулю mn+1 системи залишкових класів) і другий інвертор по модулю М-1 (M = m1*m2...mn), при цьому другий вихід блока аналізу підключено до першого входу першого інвертора, до другого входу якого підключено шину константи mn+1, а вихід якого підключено до першого входу блока пам'яті, вихід якого є виходом пристрою, а вихід блока перетворення значення ![]() з модулярної арифметики в позиційний двійковий код підключено до першого входу другого інвертора, до другого входу якого підключено шину константи М-1, а вихід другого інвертора підключено до другого входу блока пам'яті.
з модулярної арифметики в позиційний двійковий код підключено до першого входу другого інвертора, до другого входу якого підключено шину константи М-1, а вихід другого інвертора підключено до другого входу блока пам'яті.
Текст
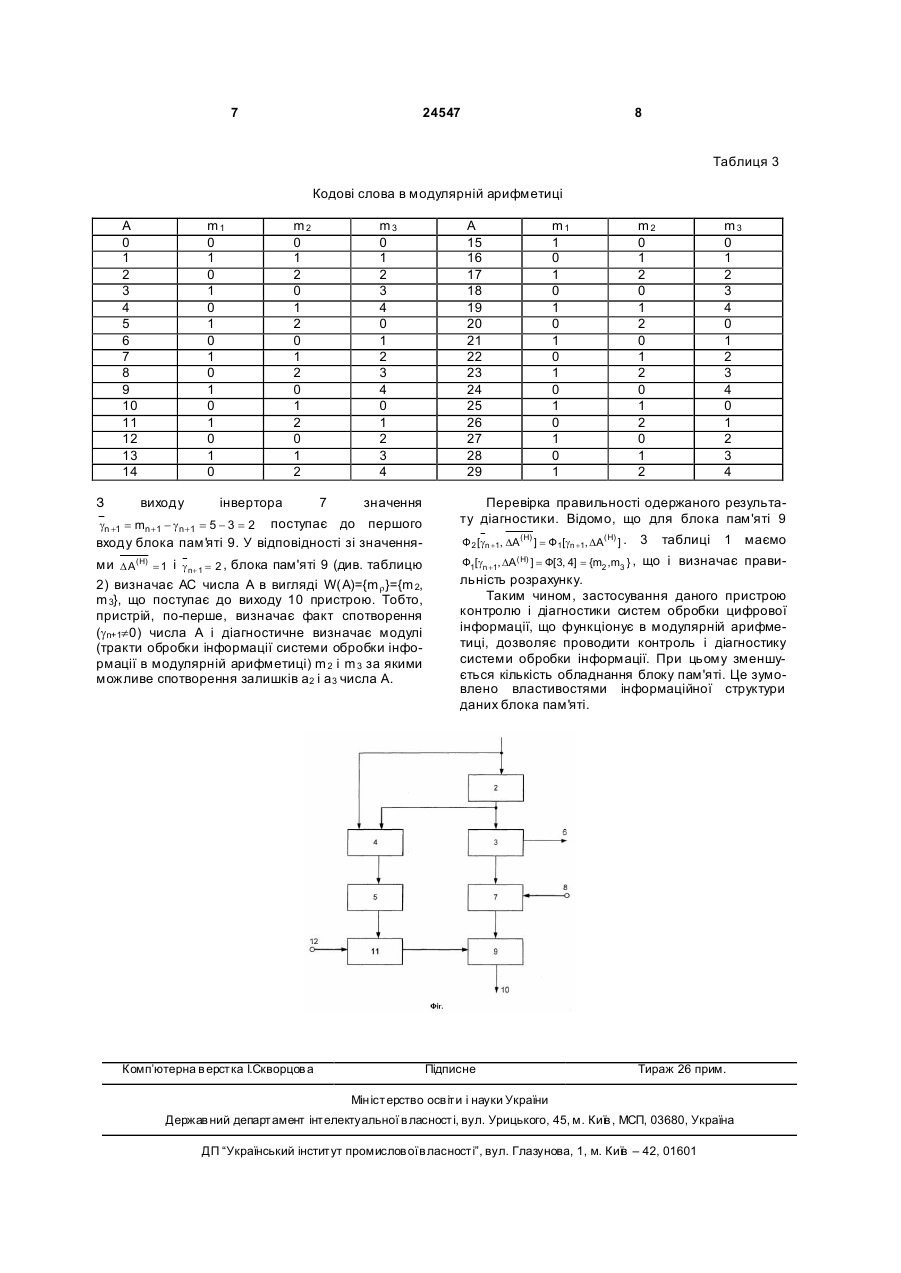
Пристрій контролю і діагностики системи обробки цифрової інформації, що функціонує в модулярній арифметиці, що містить блок обнуління, віднімач в модулярній арифметиці, блок аналізу, німача в модулярній арифметиці підключено до входу блока перетворення значення блок перетворення значення DA(H) = A - A (H) з модулярної арифметики в позиційний двійковий код, блок пам'яті, при цьому вхід блока обнуління є входом пристрою, а вихід блока обнуління підключено до входу блока аналізу та до першого входу віднімача в модулярній арифметиці, до другого входу якого підключено вхід пристрою, а вихід від чення DA(H) = A - A (H) з модулярної арифметики в позиційний двійковий код підключено до першого входу др угого інвертора, до другого входу якого підключено шину константи М-1, а ви хід другого інвертора підключено до другого входу блока пам'яті. U (13) 24547 (11) UA входом блока нулевізації, ви хід якого є входом блока аналізу, перший і другий виходи якого є відповідно виходом відсутності помилки пристрою і адресним входом блока пам'яті, вихід якого є виходом пристрою. Недолік даного аналогу - значна кількість обладнання. Найбільш близьким за технічною суттю (прототипом) до запропонованої корисної моделі є пристрій для визначення альтернативної сукупності чисел в системі залишкових класів [А.С. №1151970, МПК G 06 F 11/8], що містить блок нулевізації, блок пам'яті і блок аналізу, віднімач в модулярній арифметиці і блок перетворення значення DA(H) =A-A(H) з модулярної арифметики в позиційний двійковий код, причому вхід пристрою є входом блока нулевізації, ви хід якого є входом блока аналізу, перший і другий виходи якого є відповідно першим адресним входом блока пам'яті і виходом відсутності помилки пристрою, вихід бло (19) Корисна модель відноситься до області автоматики та обчислювальної техніки та може бути застосовано в обчислювальних системах та в системах обробки інформації, що функціонують в системі залишкових класів. Відомий пристрій для виявлення помилок в системі залишкових класів (аналог), що містить блок нулевізації, блок пам'яті констант помилок, дешифратор, перемикач, складач та групи елементів "І" [А.с. №888124, кл. G 06 F 11/08, 1980р.]. Недолік даного пристрою - значна кількість обладнання. Близьким за технічною суттю (аналогом) до запропонованої корисної моделі є пристрій для визначення альтернативної сукупності чисел в системі залишкових класів – [Акушский И.Я., Юдицкий Д.И. "Машинная арифметика в остаточних класах". - М., "Советское радио", - 1969, - С.2002002], що містить блок нулевізації, блок аналізу і блок пам'яті, причому вхід операнда пристрою є DA(H) A - A (H) з модулярної арифметики в пози= ційний двійковий код, перший вихід блока аналізу є виходом ознаки γn+1=0, який відрізняється тим, що введено перший інвертор по модулю γn+1 (де у γn+ 1 - значення залишку по модулю m n+1 системи залишкових класів) і другий інвертор по модулю М1 (M = m 1*m 2...m n), при цьому другий ви хід блока аналізу підключено до першого входу першого інвертора, до другого входу якого підключено шину константи m n+1, а вихід якого підключено до першого входу блока пам'яті, вихід якого є виходом пристрою, а вихід блока перетворення зна 3 24547 ка пам'яті є інформаційним виходом пристрою, вхід і ви хід блока нулевізації є відповідно входами зменшуваного і від'ємника віднімана по модулю, вихід якого є входом блоку перетворення коду системи залишкових класів в позиційний двійковий код, вихід якого є другим адресним входом блока пам'яті. Недолік прототипу - значна кількість обладнання, що обумовлено великою кількістю обладнання блоку пам'яті. Задача корисної моделі - зменшення кількості обладнання пристрою прототипу за рахунок зменшення в два рази кількості обладнання блоку пам'яті. Поставлена задача досягається за рахунок того, що в пристрій контролю і діагностики системи обробки цифрової інформації, що функціонує в модулярній арифметиці, що містить віднімач в модулярній арифметиці, блок аналізу, блок перетворення значення DA(H) =A-A(H) з модулярної арифметики в позиційний двійковий код, блок пам'яті, вхід блока нулевізації є входом пристрою, а вихід блока нулевізації підключено до входу блока аналізу, що реалізує операцію визначення gn+1=0, або gn+1¹0, і до першого входу віднімача в модулярній арифметиці, до другого входу якого (що реалізує операцію DA(H) =A-A(H) =(а1, а2 ,...an, a n+1)-(0, 0,..., gn+1)) підключено шина входу пристрою, вихід віднімача в модулярній арифметиці підключено до входу блока перетворення значення DA(H) =A-A(H) з модулярної арифметики в позиційний двійковий код, а перший вихід блока аналізу є виходом ознаки "gn+1=0" згідно з корисною моделлю, при цьому другий вихід блока аналізу підключено до першого входу першого інвертора, до другого входу якого підключено шину константи m n+1, а вихід якого підключено до першого входу блока пам'яті, що реалізує вибір сукупності {m p} модулів за функцією { } é (H) ù W(A) = mp = Фê gn+1, DA ú ë û , вихід якого є виходом пристрою, а вихід блока пам'яті підключено до першого входу др угого інвертора, до другого входу якого підключено шину константи М-1, а ви хід другого (H) інвертора, що реалізує операцію M1 - 1 - DA , підключено до другого входу блока пам'яті. Введення вказаних ознак дозволяє значно зменшити кількість обладнання прототипу. Структура системи обробки інформації в модулярній арифметиці представляє собою n незалежних і паралельно функціонуючих трактів обробки інформації (де n - кількість інформаційних модулів модулярної арифметиці). З метою проведення контролю і діагностики системи обробки інформації в модулярній арифметиці додатково введено контрольний m n+1 модуль, тобто вводиться додатковий тракт обробки інформації за модулем m n+1. Використовуючи додаткову інформацію, за рахунок додаткового модуля m n+1, пристрій контролю і діагностики системи обробки інформації в модулярній арифметиці здійснює контроль вірогідності функціонування кожного з інформаційних , модулів mi(i = 1 n; mn+1 > mi ) . Результатом контролю системи обробки інформації є формування сигна 4 лу (gn+1¹0) "спотворення" інформації. Якщо інформація не спотворена (gn+1=0) - сигнал "спотворення" відсутній. Результатом діагностики системи обробки інформації в модулярній арифметиці, що здійснює пристрій контролю і діагностики, є визначення всіх можливих трактів системи обробки інформації де можливе спотворення головної інформації, тобто визначається альтернативна сукупність W(A)={Mr } числа А. Сутністю корисної моделі є зменшення кількості обладнання пристрою контролю і діагностики системи обробки цифрової інформації, що функціонує в модулярній арифметиці, за рахунок суттєвого (майже в два рази) зменшення кількості логічних елементів в блоку пам'яті 9. Це зумовлено властивостями інформаційної структури даних, що містяться в блоку пам'яті 9. Властивість симетрії даних блоку пам'яті 9 відносно крапки з координаM1 + M - 1 M= 2 , де: n Õm i i =1 тою , M1=М*m n+1. Аналогічно це визначається таким чином W(A)={m p}=Ф1 [gn+1 ,DA(H) ]=Ф2{[m n+1-gn+1], [(M-1)DA(H) ]}= Ф2[ gn+1, DA( H) ] Зі збільшенням довжини розрядної сітки системи обробки інформації (збільшення величини gn+1) ефективність застосування корисної моделі значно зростає. На фігурі представлено структурну схему пристрою контролю і діагностики систем обробки цифрової інформації, що функціонує в модулярній арифметиці. Пристрій контролю і діагностики систем обробки цифрової інформації, що функціонує в модулярній арифметиці містить: 1 - вхід пристрою; 2 блок нулевізації; 3 - блок аналізу значення gn+1; 4 віднімач в модулярній арифметиці; 5 - блок перетворення значення DA(H) =A-A(H) з модулярної арифметики в позиційний двійковий код; 6 - перший вихід блоку 3 аналізу значення gn+1 (ознака gn+1=0); 7 - перший інвертор, що реалізує операцію g n + 1 = mn +1 - g n +1 , 8 - шина константи значення gn+1 (другий вхід інвертора 7); 9 - блок пам'яті (постійний запам'ятовуючий пристрій); 10 - вихід пристрою; 11 - другий інвертор, що реалізує операцію D A(H) = M - 1 - DA (H) ; 12 - шина константи значення М-1. Вхід 1 блока нулевізації 2 є входом пристрою. Вихід блока нулевізації 2 підключено до входу блока аналізу 3 і до першого входу віднімача в модулярній арифметиці 4, до другого входу якого підключено вхід 1 пристрою. Вихід віднімача в модулярній арифметиці 4 підключено до входу блока перетворення значення DA(H) =A-A(H) з модулярної арифметики в позиційний двійковий код 5. Перший 6 вихід блока аналізу 3 є виходом сигналу ознаки "gn+1=0". Другий вихід блока аналізу 3 підключено до першого входу першого 7 інвертора, до другого входу якого підключено шину 8 константи gn+1, а вихід першого 7 інвертора підключено до першого входу блока пам'яті 9, вихід 10 якого є вихід пристрою. Вихід блока перетворення значення DA(H) =A-A(H) з модулярної арифметики в позиційний двійковий код 5 підключено до першого входу другого 11 інвертора, до другого входу якого під 5 24547 ключено шину 12 константи М-1. Вихід другого 11 інвертора підключено до другого входу блока пам'яті 9. Пристрій функціонує наступним чином. На вхід 1 пристрою подається число А=(а1, а2 ,....,аn , аn+1), що представлено в модулярній арифметиці за модулями m 1, m 2,...,m n,m n+1. З виходу 1 число А поступає до входу блока нулевізації 2 та на вхід віднімача в модулярній арифметиці 4. З виходу блока нулевізації 2 нулевізоване число A(H) =(0, 0,...,0, gn+1) поступає до входу блока аналізу 3 та до іншого входу віднімача в модулярній арифметиці 4. Блок аналізу 3 аналізує значення gn+1: якщо gn+1=0, то на виході 6 з'являється сигнал ознаки "gn+1=0" , що відповідає ознаці відсутності помилок; якщо "gn+1¹0", то значення gn+1 поступає на вхід інвертора 7 до другого входу 8 якого подається значення m n+1. З ви ходу інвертора 7 значення g n +1 = mn +1 - g n +1 в унітарному коді поступає до першого входу блока пам'яті 9. З виходу віднімача в модулярній арифметиці 4 значення DA(H) =ADA(H) =[а1,а2 ,...аn,(аn+1-g n+1)mod m n+1] поступає до входу блоку 5, з ви ходу якого по шині 12 поступає значення (М-1). З ви ходу інвертора 11 значення D А (Н) = M - 1 - D A (H) в унітарному коді поступає до 6 задано значеннями gn+1 та DА (Н ) , визначається сукупність модулів W(A)={m r } за якими можлива помилка, тобто альтернативна сукупність W(A) числа А, що поступає до ви ходу 10 пристрою. Приклад реалізації операції знаходження альтернативної сукупності W(A)={m r }. Нехай задана система модулів: m 1=2, m 2=3, m 3=m n+1=5, М=2×3=6 і М1=2×3×5=30. В цьому випадку повний блок пам'я ті має наступний вигляд (таблиця 1). Нехай на вхід 1 поступає операнд А=(0, 1, 2). Блок нулевізації 2, використовує константу нулевизації К=(0, 1, 4), перетворює операнд А до виду А(H) =А-К =(0, 1, 2)-(0, 1, 4)=(0, 0, 3), де gn+1=3. На вхід блоку 4 поступає число А=(0, 1, 2) та А(H) =(0, 0, 3), а до входу блоку 5 поступає значення A(H) =AA(H) =(0, 1, 2)-(0, 0, 3)=(0, 1, 4). З виходу блоку 5 значення чотири (DА(H) =(0, 1, 4), див. таблицю 3), поступає до входу інвертора 11, з виходу якого значення DA (H ) = M = 1 - 4 = 6 - 1 - 4 = 1 поступає до другого входу блока пам'яті 9. До входу блоку 3 поступає значення DА(H) =(0,0,3). Так, як gn+1=3¹0, на вході 6 сигнал ознаки відсутності помилок відсутній, тобто вхідний операнд А спотворено і має помилки за деякими модулями {m p}. другого входу блока пам'яті 9, де за адресою, що Таблиця 1 Повний блок пам'я ті БПМ 9 gn+1 DА(H) 1 m3 m3 m3 m3 m 2, m 3 m 2, m 3 0 1 2 3 4 5 2 m 2, m 3 m 2, m 3 m 2, m 3 m 1, m 2, m 3 m 1, m 3 m 1, m 3 3 m 1.m 3 m 2.m 3 m 1.m 2, m 3 m 2.m 3 m 2.m 3 m 2.m 3 4 m 2.m 3 m 2.m 3 m3 m3 m3 m3 Скорочений блок БПМ 9 має вигляд таблиці 2. Таблиця 2 Скорочений блок пам'яті БПМ 9 gn+1 DA( H ) 0 1 2 3 4 5 1 m3 m3 m3 m 3, m 2,m 3 m 2, m 3 В таблиці 3 представлено кодові слова в модулярній арифметиці. 2 m 2, m 3 m 2, m 3 m 2, m 3 m 1, m 2, m 3 m 1, m 3, m 1, m 3 7 24547 8 Таблиця 3 Кодові слова в модулярній арифметиці А 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 З m1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 m2 0 1 2 0 1 2 0 1 2 0 1 2 0 1 2 m3 0 1 2 3 4 0 1 2 3 4 0 1 2 3 4 виходу А 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 m1 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 m2 0 1 2 0 1 2 0 1 2 0 1 2 0 1 2 m3 0 1 2 3 4 0 1 2 3 4 0 1 2 3 4 інвертора 7 значення поступає до першого входу блока пам'яті 9. У відповідності зі значення Перевірка правильності одержаного результату діагностики. Відомо, що для блока пам'яті 9 ( H) ( H) Ф 2 [gn +1, DA ] = Ф 1[gn +1, DA ] . 3 таблиці 1 маємо ми D A( H) = 1 і g n+ 1 = 2 , блока пам'яті 9 (див. таблицю 2) визначає АС числа А в вигляді W(A)={m r }={m 2, m 3}, що поступає до виходу 10 пристрою. Тобто, пристрій, по-перше, визначає факт спотворення (gn+1¹0) числа А і діагностичне визначає модулі (тракти обробки інформації системи обробки інформації в модулярній арифметиці) m 2 і m 3 за якими можливе спотворення залишків а2 і а3 числа А. Ф1[gn +1, DA( H) ]= Ф[3, 4] = {m2 ,m3 } , що і визначає правильність розрахунку. Таким чином, застосування даного пристрою контролю і діагностики систем обробки цифрової інформації, що функціонує в модулярній арифметиці, дозволяє проводити контроль і діагностику системи обробки інформації. При цьому зменшується кількість обладнання блоку пам'яті. Це зумовлено властивостями інформаційної структури даних блока пам'яті. = mn+1 - g n+1 5 - 3 2 gn +1 = = Комп’ютерна в ерстка І.Скворцов а Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for monitoring system for processing digital information with performing operations of modulo arithmetic
Автори англійськоюIliushko Viktor Mykhailovych, Heri Ali Abdullakh, Khery Ali Abdullah, Krasnobaiev Viktor Anatoliiovych, Zefirova Olha Volodymyrivna
Назва патенту російськоюУстройство для контроля системы обработки цифровой информации с выполнением операций арифметики
Автори російськоюИлюшко Виктор Михайлович, Хери Али Абдуллах, Краснобаев Виктор Анатольевич, Зефирова Ольга Владимировна
МПК / Мітки
МПК: G06F 11/08
Мітки: цифрової, арифметиці, функціонує, контролю, пристрій, модулярній, обробки, діагностики, системі, інформації
Код посилання
<a href="https://ua.patents.su/4-24547-pristrijj-kontrolyu-i-diagnostiki-sistemi-obrobki-cifrovo-informaci-shho-funkcionueh-v-modulyarnijj-arifmetici.html" target="_blank" rel="follow" title="База патентів України">Пристрій контролю і діагностики системи обробки цифрової інформації, що функціонує в модулярній арифметиці</a>
Пристрій для визначення середньої потужності перешкод, діючих у каналі передачі інформації широкосмугової інформаційної системи
Номер патенту: 21997
Опубліковано: 10.04.2007
Автори: Литвин Олександр Степанович, Слесаренко Сергій Сергійович, Кобак Микола Миколайович, Верещак Валерій Павлович
МПК: H04B 7/00
Мітки: каналі, інформаційної, перешкод, пристрій, потужності, діючих, середньої, широкосмугової, передачі, системі, визначення, інформації
Формула / Реферат:
Пристрій для визначення середньої потужності перешкод, діючих у каналі передачі інформації широкосмугової інформаційної системи, що містить перемножувач, вхід якого є входом пристрою, лінію затримки, послідовно включені перший суматор та перший квадратор, накопичувач, який відрізняється тим, що в нього введено перший підсилювач, вхід і вихід якого відповідно підключені до виходу перемножувача та входу першого суматора, послідовно з'єднані...
Пристрій для виявлення збоїв багатоканальної синхронізованої цифрової системи
Номер патенту: 65372
Опубліковано: 15.03.2004
Автори: Бандура Іван Миколайович, Китайчук Ігор Євгенович, Симонов Володимир Федорович
МПК: G06F 11/16, G06F 11/14
Мітки: пристрій, синхронізованої, збоїв, цифрової, багатоканальної, системі, виявлення
Формула / Реферат:
Пристрій для виявлення збоїв багатоканальної синхронізованої цифрової системи, який містить n каналів, причому кожен канал містить перший і другий мажоритарні елементи, генератор імпульсів, перший, другий, третій, четвертий тригери, перший і другий елементи І, перший, другий, третій входи імпульсів контролю, які підключені до першого мажоритарного елемента, перший, другий входи формування стробу запису, що підключені до другого мажоритарного...
Пристрій для обробки інформації мультипроцесорної системи
Номер патенту: 5007
Опубліковано: 28.12.1994
Автор: Коссовський Владіслав Георгійович
МПК: G06F 15/00, G06F 15/76
Мітки: обробки, мультипроцесорної, інформації, системі, пристрій
Формула / Реферат:
Устройство для обработки информации мультипроцессорной системы, содержащее процессор, блок оперативной памяти, блок памяти команд, первый блок управления и входной регистр, отличающееся тем, что, с целью повышения быстродействия, оно содержит второй блок управления, блок памяти признаков, блок памяти готовых сегментов, блок памяти готовых результатов, блок памяти адресов, селектор адреса, селектор команд, блок модификации признаков, блок...
Модуль для цифрової обробки текстової інформації
Номер патенту: 24588
Опубліковано: 04.08.1998
Автори: Чікіна Валентина Олексіївна, Журавок Олена Володимирівна, Шабанов-Кушнаренко Юрій Петрович
МПК: H03M 13/00, H03M 7/00
Мітки: обробки, цифрової, текстової, модуль, інформації
Формула / Реферат:
Модуль для цифровой обработки текстовой информации, содержащий первый функциональный блок, состоящий из двух обратимых блоков конъюнкции и одного обратимого блока дизъюнкции, первых, вторых и третьих групп входов и выходов первого и второго обратимых блоков конъюнкции, третьи группы выходов подключены соответственно к первой и второй группам входов обратимого блока дизъюнкции и третьей группы входов обратимого блока дизъюнкции, первой, второй...
Пристрій обробки інформації
Номер патенту: 62894
Опубліковано: 15.12.2003
Автори: Кошовий Микола Дмитрович, Світличний Олександр Володимирович, Дергачов Володимир Андрійович, Сенько Валерій Євгенович
МПК: G06F 7/38, G06F 15/00
Мітки: пристрій, обробки, інформації
Формула / Реферат:
Пристрій обробки інформації містить шість входів, вихід пристрою, два елементи І, елемент АБО, мультиплексор, причому перший вхід пристрою з'єднаний з першим адресним входом мультиплексора, четвертий вхід пристрою з'єднаний з першим входом першого елемента І, перший вхід мультиплексора з'єднаний з логічним нулем, який відрізняється тим, що має третій елемент І, другий і третій елементи АБО, причому другий вхід пристрою з'єднаний з другим...
Попередній патент: Відцентрово-пневматичний сепаратор
Наступний патент: Спосіб визначення вгодованості веслоноса
Випадковий патент: Робоче обладнання для реконструкції трубопроводів