Пристрій для визначення координат тривимірної криволінійної поверхні об`єкта
Номер патенту: 25633
Опубліковано: 10.08.2007
Автори: Олефір Ганна Олексіївна, Астанін В'ячеслав Валентинович
Формула / Реферат
Пристрій для визначення координат тривимірної криволінійної поверхні об'єкта, що містить вимірювальний наконечник для здійснення контакту зі сканованою поверхнею, напрямний стрижень з рухомим відносно нього повзуном і вузол кріплення пристрою на сканованій поверхні, який відрізняється тим, що напрямний стрижень виконаний циліндричним і забезпечений засобами кріплення безпосередньо на вимірюваній ділянці поверхні, а жорстко з'єднаний з вимірювальним наконечником повзун сконструйований з можливістю здійснення обертального і прямолінійного руху відносно поздовжньої осі циліндричного напрямного стрижня по циліндричній поверхні напрямного стрижня, причому датчики обертального і прямолінійного переміщення повзуна відносно циліндричної поверхні напрямного стрижня розташовані безпосередньо на повзуні.
Текст
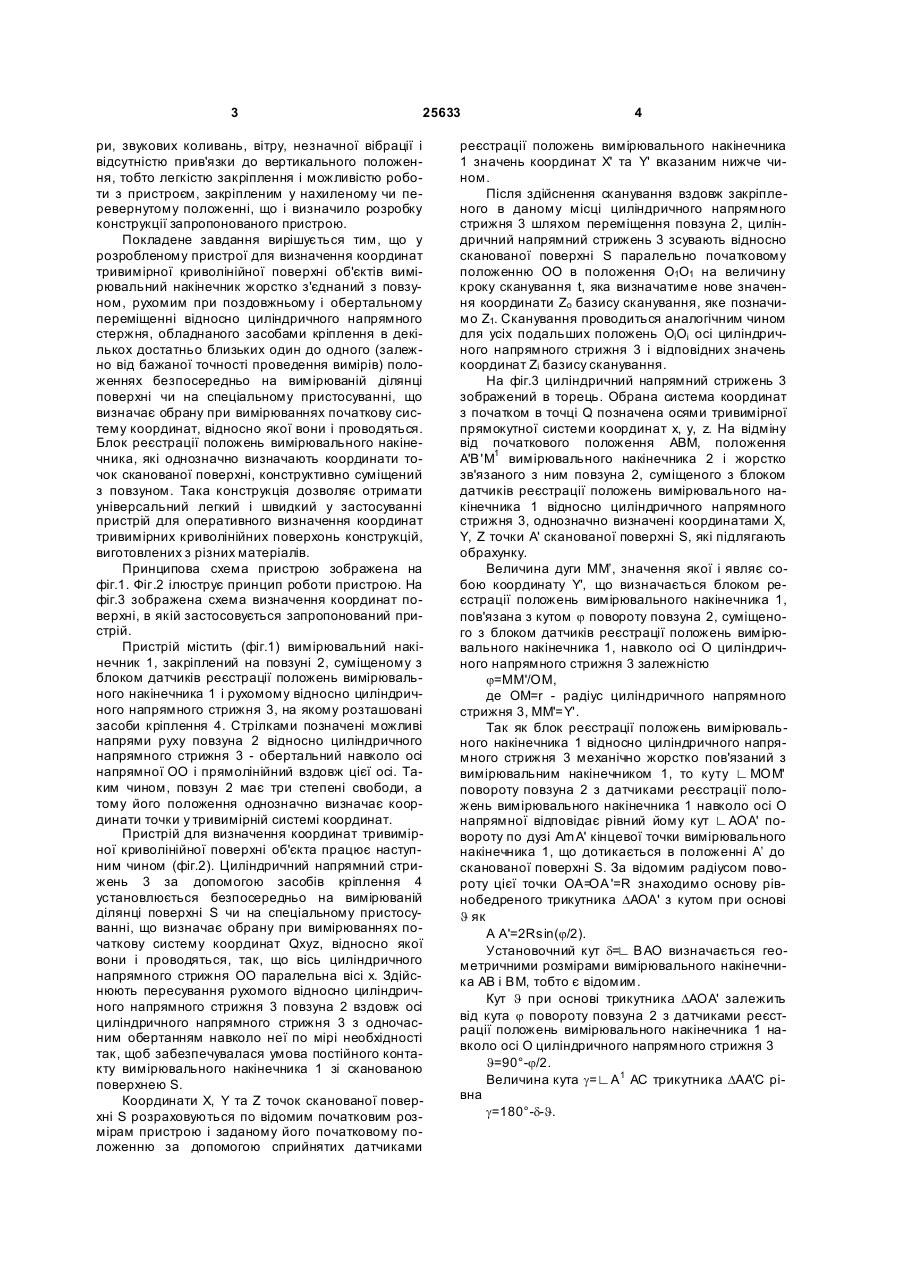
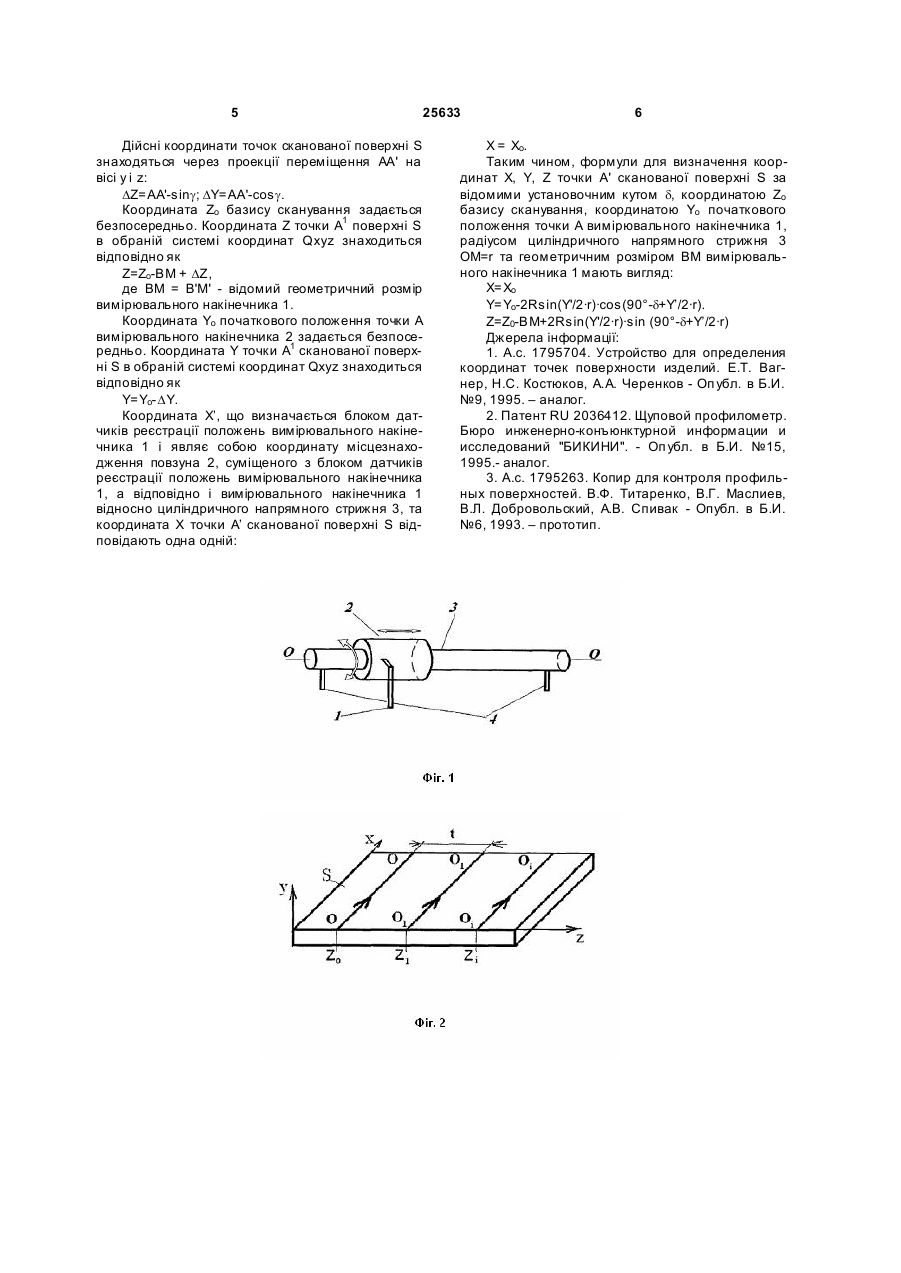
Пристрій для визначення координат тривимірної криволінійної поверхні об'єкта, що містить вимірювальний наконечник для здійснення контакту зі сканованою поверхнею, напрямний стрижень з рухомим відносно нього повзуном і вузол кріплен 3 25633 ри, звукових коливань, вітру, незначної вібрації і відсутністю прив'язки до вертикального положення, тобто легкістю закріплення і можливістю роботи з пристроєм, закріпленим у нахиленому чи перевернутому положенні, що і визначило розробку конструкції запропонованого пристрою. Покладене завдання вирішується тим, що у розробленому пристрої для визначення координат тривимірної криволінійної поверхні об'єктів вимірювальний накінечник жорстко з'єднаний з повзуном, рухомим при поздовжньому і обертальному переміщенні відносно циліндричного напрямного стержня, обладнаного засобами кріплення в декількох достатньо близьких один до одного (залежно від бажаної точності проведення вимірів) положеннях безпосередньо на вимірюваній ділянці поверхні чи на спеціальному пристосуванні, що визначає обрану при вимірюваннях початкову систему координат, відносно якої вони і проводяться. Блок реєстрації положень вимірювального накінечника, які однозначно визначають координати точок сканованої поверхні, конструктивно суміщений з повзуном. Така конструкція дозволяє отримати універсальний легкий і швидкий у застосуванні пристрій для оперативного визначення координат тривимірних криволінійних поверхонь конструкцій, виготовлених з різних матеріалів. Принципова схема пристрою зображена на фіг.1. Фіг.2 ілюструє принцип роботи пристрою. На фіг.3 зображена схема визначення координат поверхні, в якій застосовується запропонований пристрій. Пристрій містить (фіг.1) вимірювальний накінечник 1, закріплений на повзуні 2, суміщеному з блоком датчиків реєстрації положень вимірювального накінечника 1 і рухомому відносно циліндричного напрямного стрижня 3, на якому розташовані засоби кріплення 4. Стрілками позначені можливі напрями руху повзуна 2 відносно циліндричного напрямного стрижня 3 - обертальний навколо осі напрямної ОО і прямолінійний вздовж цієї осі. Таким чином, повзун 2 має три степені свободи, а тому його положення однозначно визначає координати точки у тривимірній системі координат. Пристрій для визначення координат тривимірної криволінійної поверхні об'єкта працює наступним чином (фіг.2). Циліндричний напрямний стрижень 3 за допомогою засобів кріплення 4 установлюється безпосередньо на вимірюваній ділянці поверхні S чи на спеціальному пристосуванні, що визначає обрану при вимірюваннях початкову систему координат Qxyz, відносно якої вони і проводяться, так, що вісь циліндричного напрямного стрижня ОО паралельна вісі х. Здійснюють пересування рухомого відносно циліндричного напрямного стрижня 3 повзуна 2 вздовж осі циліндричного напрямного стрижня 3 з одночасним обертанням навколо неї по мірі необхідності так, щоб забезпечувалася умова постійного контакту вимірювального накінечника 1 зі сканованою поверхнею S. Координати X, Y та Z точок сканованої поверхні S розраховуються по відомим початковим розмірам пристрою і заданому його початковому положенню за допомогою сприйнятих датчиками 4 реєстрації положень вимірювального накінечника 1 значень координат X' та Y' вказаним нижче чином. Після здійснення сканування вздовж закріпленого в даному місці циліндричного напрямного стрижня 3 шляхом переміщення повзуна 2, циліндричний напрямний стрижень 3 зсувають відносно сканованої поверхні S паралельно початковому положенню ОО в положення O1O1 на величину кроку сканування t, яка визначатиме нове значення координати Zo базису сканування, яке позначимо Z1. Сканування проводиться аналогічним чином для усіх подальших положень OiOi осі циліндричного напрямного стрижня 3 і відповідних значень координат Zi базису сканування. На фіг.3 циліндричний напрямний стрижень 3 зображений в торець. Обрана система координат з початком в точці Q позначена осями тривимірної прямокутної системи координат х, у, z. На відміну від початкового положення АВМ, положення А'В'М1 вимірювального накінечника 2 і жорстко зв'язаного з ним повзуна 2, суміщеного з блоком датчиків реєстрації положень вимірювального накінечника 1 відносно циліндричного напрямного стрижня 3, однозначно визначені координатами X, Y, Z точки А' сканованої поверхні S, які підлягають обрахунку. Величина дуги MM’, значення якої і являє собою координату Y', що визначається блоком реєстрації положень вимірювального накінечника 1, пов'язана з кутом j повороту повзуна 2, суміщеного з блоком датчиків реєстрації положень вимірювального накінечника 1, навколо осі О циліндричного напрямного стрижня 3 залежністю j=MM'/ОМ, де ОМ=r - радіус циліндричного напрямного стрижня 3, MM'=Y'. Так як блок реєстрації положень вимірювального накінечника 1 відносно циліндричного напрямного стрижня 3 механічно жорстко пов'язаний з вимірювальним накінечником 1, то куту ∟ MOM' повороту повзуна 2 з датчиками реєстрації положень вимірювального накінечника 1 навколо осі О напрямної відповідає рівний йому кут ∟AOA' повороту по дузі АmА' кінцевої точки вимірювального накінечника 1, що дотикається в положенні А’ до сканованої поверхні S. За відомим радіусом повороту цієї точки ОА=ОА '=R знаходимо основу рівнобедреного трикутника DАОА' з кутом при основі J як А А'=2Rsin(j/2). Установочний кут d=∟ BAO визначається геометричними розмірами вимірювального накінечника АВ і ВМ, тобто є відомим. Кут J при основі трикутника DАОА' залежить від кута j повороту повзуна 2 з датчиками реєстрації положень вимірювального накінечника 1 навколо осі О циліндричного напрямного стрижня 3 J=90°-j/2. Величина кута g=∟А1 АС трикутника DАА'С рівна g=180°-d-J. 5 25633 Дійсні координати точок сканованої поверхні S знаходяться через проекції переміщення АА' на вісі у і z: DZ=AA'-sing; DY=AA'-cosg. Координата Zo базису сканування задається безпосередньо. Координата Z точки А1 поверхні S в обраній системі координат Qxyz знаходиться відповідно як Z=Zo-BM + DZ, де ВМ = В'М' - відомий геометричний розмір вимірювального накінечника 1. Координата Yo початкового положення точки А вимірювального накінечника 2 задається безпосередньо. Координата Y точки А1 сканованої поверхні S в обраній системі координат Qxyz знаходиться відповідно як Y=Yo-DY. Координата X’, що визначається блоком датчиків реєстрації положень вимірювального накінечника 1 і являє собою координату місцезнаходження повзуна 2, суміщеного з блоком датчиків реєстрації положень вимірювального накінечника 1, а відповідно і вимірювального накінечника 1 відносно циліндричного напрямного стрижня 3, та координата X точки А’ сканованої поверхні S відповідають одна одній: 6 Х = Хo. Таким чином, формули для визначення координат X, Y, Z точки А' сканованої поверхні S за відомими установочним кутом d, координатою Zo базису сканування, координатою Yo початкового положення точки А вимірювального накінечника 1, радіусом циліндричного напрямного стрижня 3 ОМ=r та геометричним розміром ВМ вимірювального накінечника 1 мають вигляд: X=Xo Y=Yo-2Rsin(Y'/2·r)·cos(90°-d+Y’/2·r). Z=Z0-ВМ+2Rsin(Y'/2·r)·sin (90°-d+Y’/2·r) Джерела інформації: 1. А.с. 1795704. Устройство для определения координат точек поверхности изделий. Е.Т. Вагнер, Н.С. Костюков, А.А. Черенков - Оп убл. в Б.И. №9, 1995. – аналог. 2. Патент RU 2036412. Щуповой профилометр. Бюро инженерно-конъюнктурной информации и исследований "БИКИНИ". - Оп убл. в Б.И. №15, 1995.- аналог. 3. А.с. 1795263. Копир для контроля профильных поверхностей. В.Ф. Титаренко, В.Г. Маслиев, В.Л. Добровольский, А.В. Спивак - Опубл. в Б.И. №6, 1993. – прототип. 7 Комп’ютерна в ерстка Г. Паяльніков 25633 8 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for determining the coordinates of the points of the three-dimensional curved surface of an object
Автори англійськоюOlefir Hanna Oleksiivna
Назва патенту російськоюУстройство для определения координат точек трехмерной криволинейной поверхности объекта
Автори російськоюОлефир Анна Алексеевна
МПК / Мітки
МПК: G01B 5/30
Мітки: об'єкта, координат, тривимірної, криволінійної, пристрій, визначення, поверхні
Код посилання
<a href="https://ua.patents.su/4-25633-pristrijj-dlya-viznachennya-koordinat-trivimirno-krivolinijjno-poverkhni-obehkta.html" target="_blank" rel="follow" title="База патентів України">Пристрій для визначення координат тривимірної криволінійної поверхні об`єкта</a>
Спосіб визначення координат точок поверхні манекена
Номер патенту: 63491
Опубліковано: 15.01.2004
Автори: Славінська Алла Людвігівна, Михайловський Юрій Броніславович, Мица Вікторія Василівна
МПК: A41H 1/00
Мітки: манекена, поверхні, визначення, точок, спосіб, координат
Формула / Реферат:
Спосіб визначення координат точок поверхні манекена, який здійснюється за допомогою градуйованої платформи з манекеном, що обертається, приводів для обертання манекена та переміщення вертикального стержня, механізму фіксування координат точок, який відрізняється тим, що координати точок поверхні манекена - кут повороту манекена, величина переміщення вертикального стержня з механізмом ролика, відстань від поверхні манекена до осі обертання...
Пристрій для визначення координат рухомого випромінюючого об’єкта
Номер патенту: 46245
Опубліковано: 15.11.2004
Автори: Тітов Валерій Сергійович, Радченко Октябрина Антонівна, Стеріополо Євген Анатолійович, Чигирин Олег Трохимович, Остапов Анатолій Олександрович
Мітки: об'єкта, визначення, пристрій, координат, рухомого, випромінюючого
Формула / Реферат:
Пристрій для визначення координат рухомого випромінюючого об'єкта, що складається із апаратури ведучого та веденого приймальних пунктів, причому апаратура ведучого приймального пункту містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, перший блок обчислення відстані, датчик швидкості, датчик курсу, пристрій індикації, в якому перший вхід антени через привід антени сполучений з першим виходом...
Система для визначення координат та швидкості рухомого об’єкта
Номер патенту: 69200
Опубліковано: 16.08.2004
Автори: Савченко Віталій Анатолійович, Кравченко Юрій Васильович, Мосов Сергій Петрович, Машков Олег Альбертович
МПК: G01S 5/02
Мітки: рухомого, об'єкта, система, визначення, координат, швидкості
Формула / Реферат:
Система для визначення координат та швидкості рухомого об'єкта, що містить приймач радіонавігаційних сигналів, встановлений на рухомому об'єкті, та мережу випромінювачів радіонавігаційних сигналів, встановлених на навігаційних космічних апаратах, яка відрізняється тим, що система додатково містить радіонавігаційну станцію, встановлену на літальному апараті, яка включає приймач, блок обробки та випромінювач радіонавігаційних сигналів.
Спосіб визначення планових координат точок на земній поверхні
Номер патенту: 64097
Опубліковано: 15.03.2005
Автори: Романишин Ігор Богданович, Шевченко Тарас Георгійович, Третяк Корнилій Романович, Голубінка Юрій Ігорович
МПК: G01C 5/00
Мітки: поверхні, земній, планових, спосіб, координат, визначення, точок
Формула / Реферат:
1. Спосіб обеззаражування овочів, фруктів та ягід в якому, почергово, спочатку ведуть промивання овочів, фруктів та ягід у негативно електроактивованій воді (католіті) з окислювально-відновлювальним потенціалом (-480) мВ, потім ведуть замочування овочів. фруктів та ягід у позитивно електроактивованій воді (аноліті) з окислювально-відновлювальним потенціалом (+1140) мВ, який відрізняється тим, що промивання овочів, фруктів та ягід ведуть у...
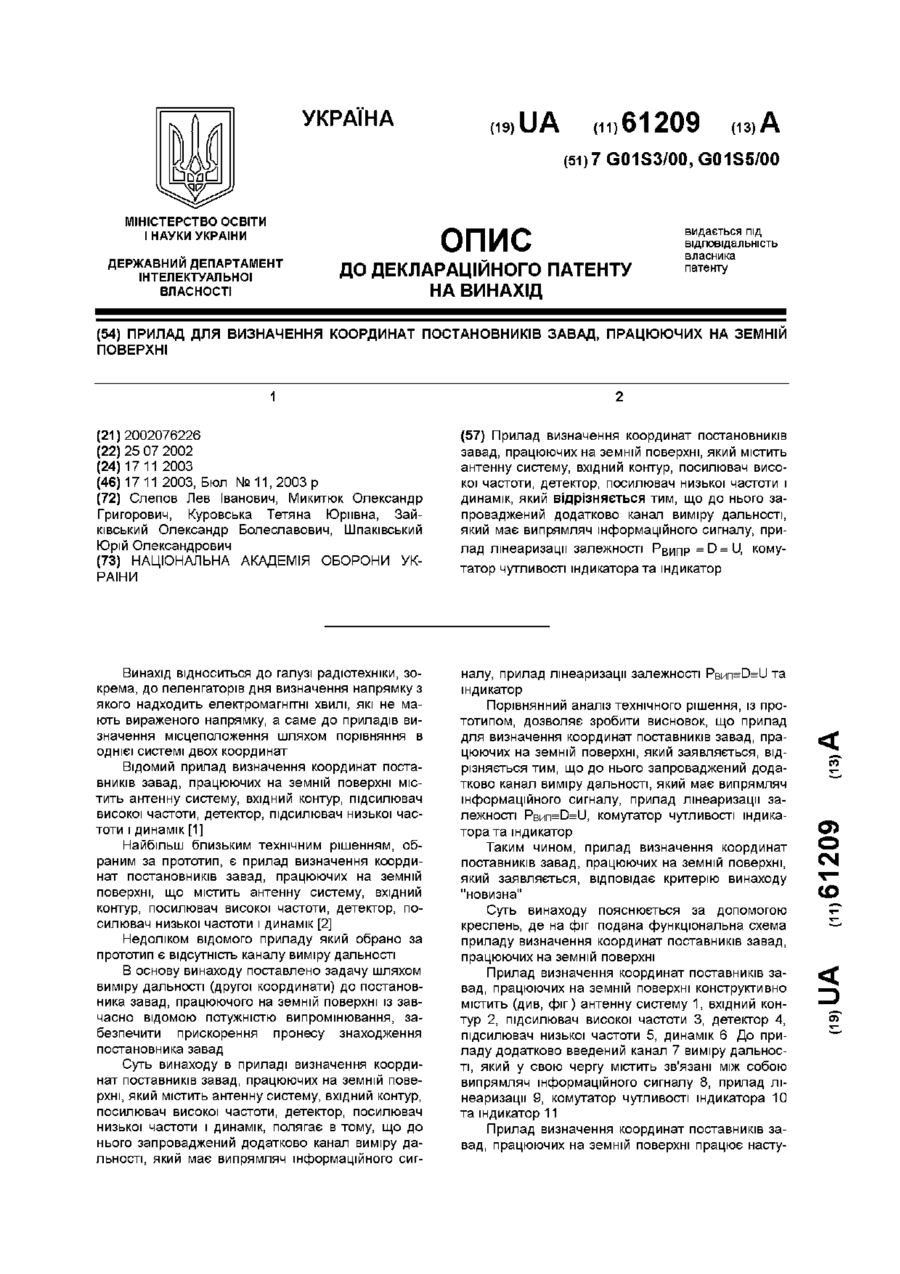
Прилад для визначення координат постановників завад, працюючих на земній поверхні
Номер патенту: 61209
Опубліковано: 17.11.2003
Автори: Слепов Лев Іванович, Микитюк Олександр Григорович, Куровська Тетяна Юріївна, Шпаківський Юрій Олександрович, Зайківський Олександр Болеславович
Мітки: прилад, земній, координат, завад, поверхні, визначення, працюючих, постановників
Формула / Реферат:
Прилад для визначення координат постановників завад, які працюють на земній поверхні, що містить антенну систему, вхідний контур, підсилювач високої частоти, детектор, підсилювач низької частоти і динамік, який відрізняється тим, що він додатково містить канал виміру дальності, який має випрямляч інформаційного сигналу, прилад лінеаризації залежності комутатор чутливості...
Попередній патент: Пристрій для подрібнення пластикових пляшок
Наступний патент: Перетворювач несинусоїдального струму
Випадковий патент: Спосіб захисту кімберлітових кар'єрів від підземних вод