Спосіб визначення планових координат точок на земній поверхні
Номер патенту: 64097
Опубліковано: 15.03.2005
Автори: Голубінка Юрій Ігорович, Шевченко Тарас Георгійович, Романишин Ігор Богданович, Третяк Корнилій Романович
Формула / Реферат
1. Спосіб обеззаражування овочів, фруктів та ягід в якому, почергово, спочатку ведуть промивання овочів, фруктів та ягід у негативно електроактивованій воді (католіті) з окислювально-відновлювальним потенціалом (-480) мВ, потім ведуть замочування овочів. фруктів та ягід у позитивно електроактивованій воді (аноліті) з окислювально-відновлювальним потенціалом (+1140) мВ, який відрізняється тим, що промивання овочів, фруктів та ягід ведуть у негативно електроактивованій воді (католіті) з рН 9,0 - 11,5 та окислювально-відновлювальним потенціалом (-400) - (-870) мВ, потім замочування овочів, фруктів та ягід ведуть у позитивно електроактивованій воді (аноліті) з рН 2,0-8,5, окислювально-відновлювальним потенціалом (+1300) - (+300) мВ та вмістом активного хлору 0,02 - 0,06%, при чому аноліт та католіт вводять порціонне у наперед заданих режимах.
2. Спосіб обеззаражування овочів, фруктів та ягід згідно п.1, який відрізняється тим, що вимірюють інтенсивність зниження активності розчину і встановлюють об'єм порцій і частоту введення в залежності від інтенсивності зниження поточних показників параметрів розчину.
3. Спосіб обеззаражування овочів, фруктів та ягід, згідно п. 1 і 2, який відрізняється тим, що аноліт вводять порціонне на протязі усього терміну зберігання овочів, фруктів та ягід.
Текст
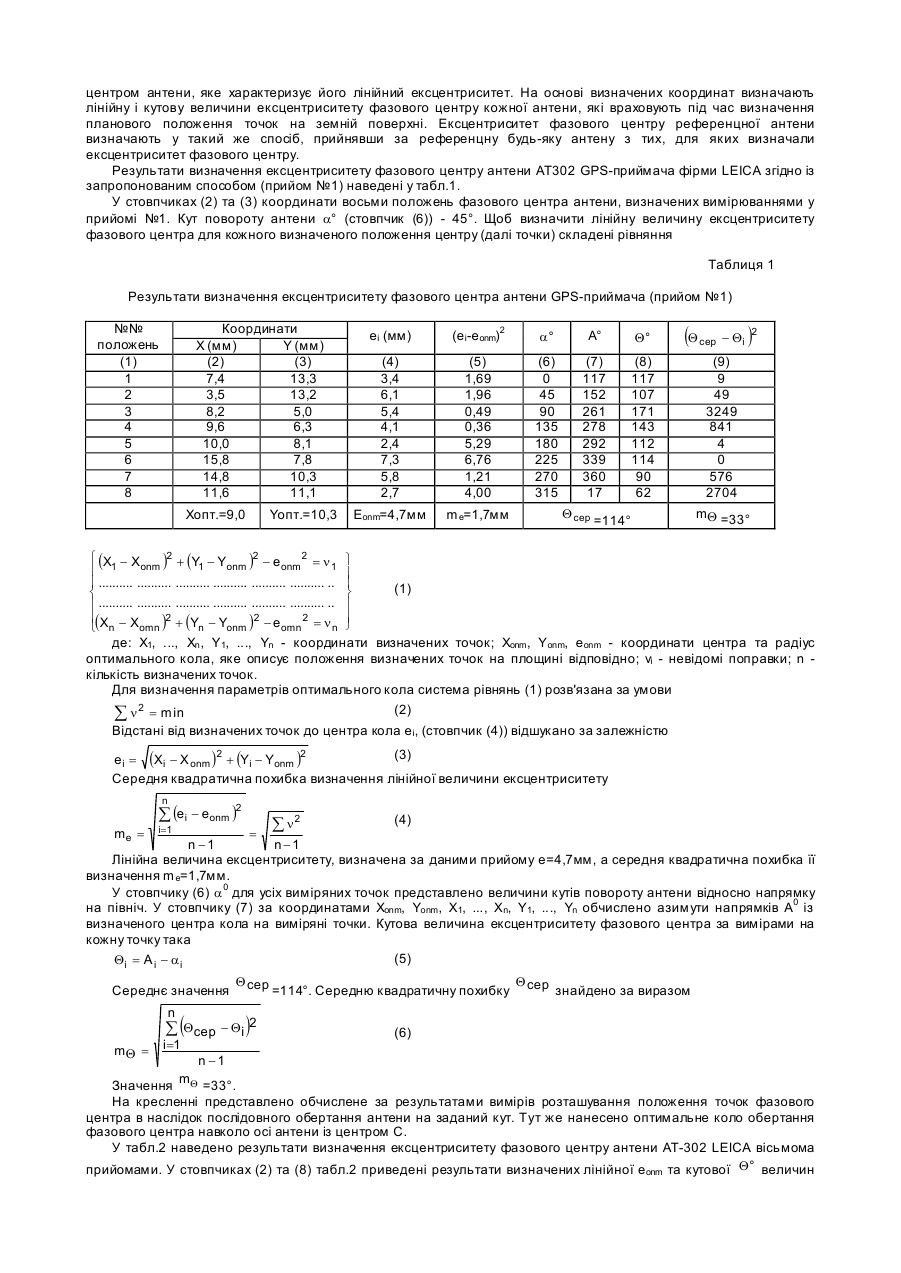
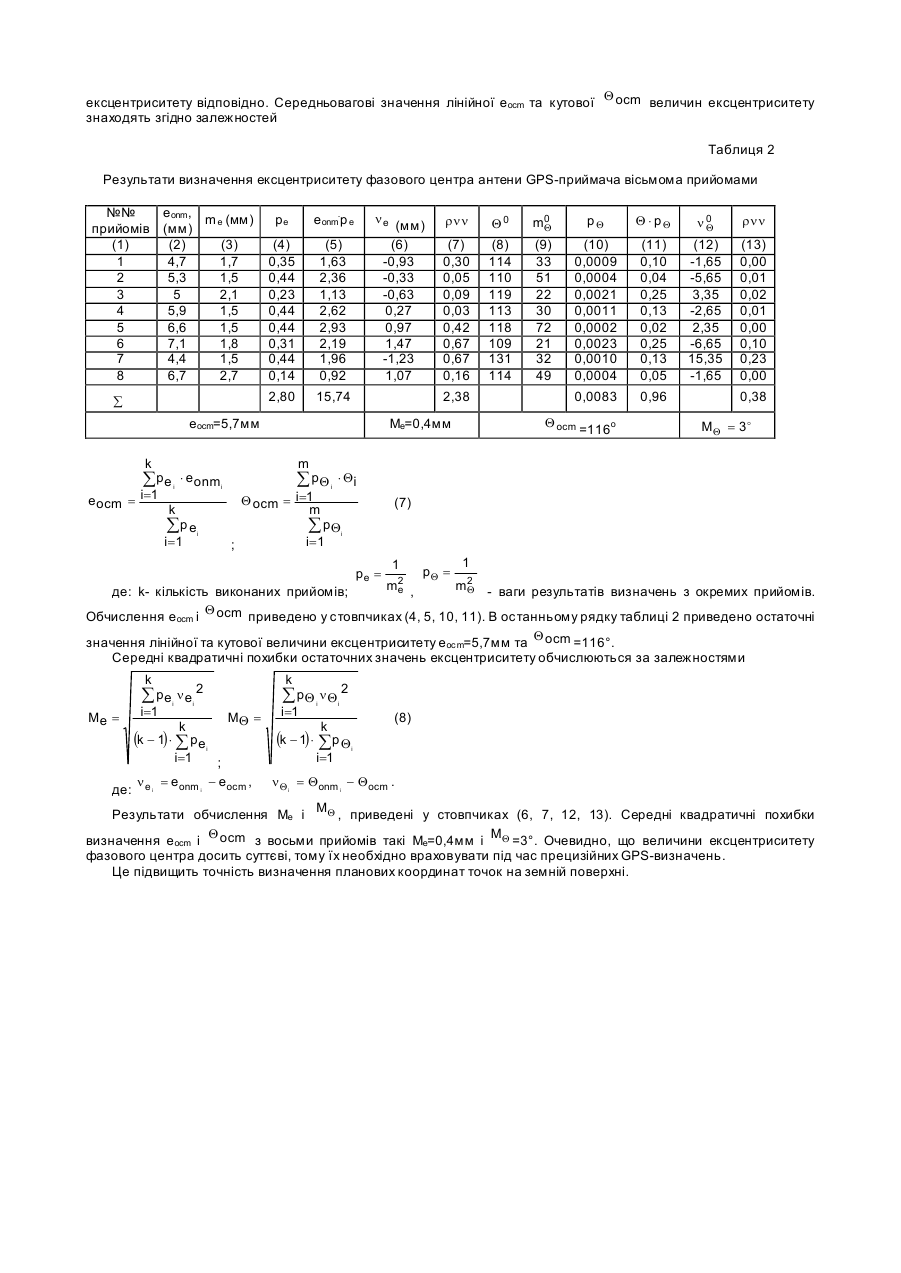
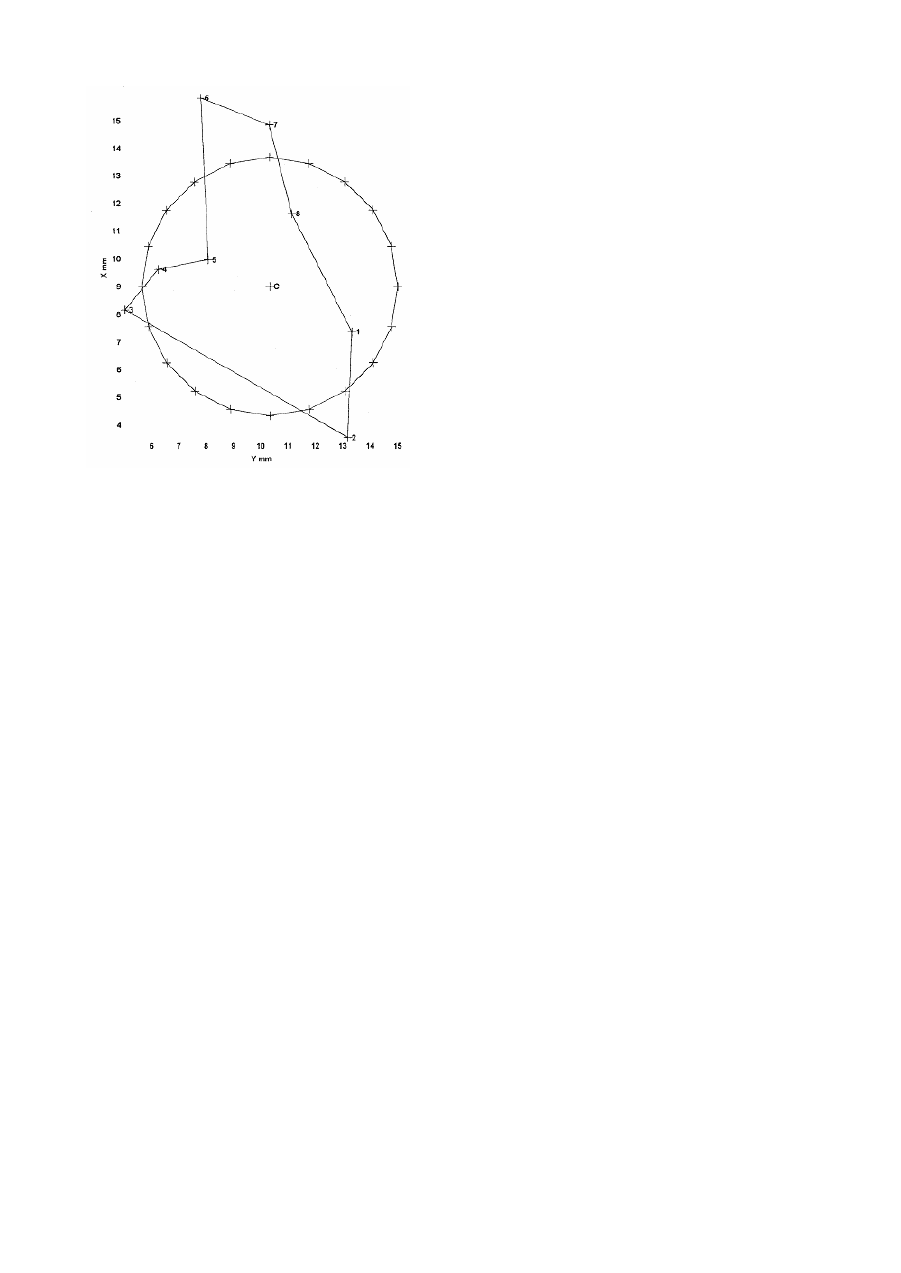
Винахід відноситься до геодезичних вимірів, а, конкретно, до способів визначення планових координат точок на земній поверхні. Відомий спосіб визначення планових координат точок на земній поверхні полягає у тому, що проводять польове рекогносцирування місцевості, позначають на місцевості точки геодезичної мережі, визначають оптимальну схему вимірів максимальної інформативності, формують оптимально необхідні сесії вимірів, встановлюють системи GPS у точках мережі, виконують виміри і визначають положення точок на земній поверхні (Спосіб визначення положення точок на земній поверхні. Деклараційний патент на винахід 42431. Україна, МПК G01С5/00/К.Третяк (Україна) - N2001021169; заявлено 19.02.2001; опубл. 15.10.2001, бюл.№9, 5ст.). Однак, на точність визначення планових координат точок на земній поверхні системами GPS впливають різноманітні фактори, а, зокрема, інструментальні похибки GPS-приймачів. Результати високоточних вимірів, виконаних GPS-приймачами, спотворюються у результаті того, що фазовий центр супутникової антени не збігається з її віссю обертання. Величина розбіжності може сягати кількох міліметрів. Тому у прецизійних GPSвимірюваннях субміліметрової точності такі величини спотворень необхідно враховувати. Інстр укції експлуатації GPS-приймачів рекомендують під час вимірів орієнтувати мітку антен приймачів у північному напрямку. Проте, орієнтування антен приймачів може виключити похибку за зсув фазових центрів антен лише у тому випадку, коли величини ексцентриситету як лінійного, так і кутового, є тотожними для всіх антен, які одночасно беруть участь у вимірах, тобто, кожна з антен має той самий ексцентриситет, а його максимальна величина однаково орієнтована відносно мітки антени. У спеціальній літературі відсутня інформація про технологію корекції положення фазового центра у заводських умовах. Тим не менше, виготовити ці антени так, щоб вони мали тотожні величини лінійного та кутового ексцентриситету технологічно не доцільно, а, скоріше, неможливо. Простіше звести ексцентриситет до нуля. Але антени, що експлуатуються, зазвичай, мають до того ж і різний ексцентриситет. Отже, уникнути ексцентриситету технологічно недосяжно. А орієнтація антен мітками на північ не дає можливості уникнути впливу зсуву фазових центрів антен на точність вимірів. В основу винаходу поставлене завдання вдосконалити спосіб визначення планових координат точок на земній поверхні, в якому для кожної з антен визначають лінійну та кутову величини ексцентриситету, які враховують під час визначення планового положення точок на земній поверхні, що дає можливість підвищити точність вимірів. Поставлене завдання вирішують тим, що у способі визначення планових координат точок на земній поверхні, який заключається у тому, що проводять польове рекогносцирування місцевості, позначають на місцевості точки геодезичної мережі, визначають оптимальну схему вимірів максимальної інформативності, формують оптимально необхідні сесії вимірів, встановлюють системи GPS у точках мережі, виконують виміри і визначають положення точок на земній поверхні, згідно з винаходом, перед визначенням положення точок на земній поверхні встановлюють антени приймачів GPS на невеликій віддалі одна від одної, вибирають одну з них референцною, повертають інші антени у положення, рівномірно рознесені по колу, в кожному з положень антени виконують вимірювання, на основі яких визначають лінійну і кутову величини ексцентриситету фазового центру кожної антени, які враховують під час .визначення планового положення точок на земній поверхні. Введення поправок за ексцентриситет кожної з антен дозволяє підвищити точність визначення планових координат точок на земній поверхні. З'являється можливість виконувати прецизійні GPS-виміри, досягаючи субміліметрової точності. Спосіб визначення планових координат точок на земній поверхні здійснюють таким чином. Проводять польове рекогносцирування місцевості. З цією метою виїжджають на місце, де розташована мережа. У разі необхідності, коли це мережа новостворювана, позначають на місцевості точки мережі. Визначають координати точок мережі та інформативність кожного вектора вимірів. Визначають оптимальну схему вимірів максимальної інформативності вилученням максимальної кількості вимірів мінімальної інформативності. За допомогою ефективності сесії Е для конкретної мережі добирають оптимальну кількість приймачів та мінімізують ряд послідовних сесій. Процес вилучення сесій з ряду послідовних сесій завершується коли m реал ³ m доп, де m реал значення похибки визначення координат в оптимальній моделі мережі, mдоп - допустима похибка визначення координат точки, задана у вихідних даних. Якщо m реал>m доп, остання вилучена сесія повертається в ряд послідовних сесій, тобто формують оптимально необхідні сесії вимірів. Встановлюють системи GPS послідовно у визначених точках мережі. Точки, у яких потрібно розташовувати системи GPS, визначені при формуванні оптимально необхідних сесій вимірів. Проводять виміри згідно інструкцій. Наприклад, центрують антени приймачів над точками мережі, які закріплені реперами, калібрують приймачі і т.д. Одержані результати вимірів заносять у комп'ютер і згідно програми визначають положення точок на земній поверхні. Перед визначенням положення точок на земній поверхні встановлюють антени приймачів GPS на невеликій віддалі одна від одної, яка не перевищує, наприклад, 10м. Вибирають одну з них референцною, тобто нерухомою, відносно якої ведуть вимірювання. Повертають інші антени у положення, рівномірно рознесені по колу, лишаючи підставки антен нерухомими. Антену .повертають за ходом годинникової стрілки на певні кути, рівномірно рознесені по колу, величина яких вкладається у 2p ціле число разів, наприклад, 20°,45° і т.д. Величину кута повороту антени вибирають у залежності від величини зсуву фазового центру. З метою визначення азимуту ексцентриситету фазового центру орієнтацію антени за міткою у північному напрямку виконують, наприклад, за допомогою бусолі. Коли фазовий центр антени не збігається з її віссю обертання, з'являється зсув фазового центру, або ексцентриситет. Під час повороту антени, що має зсув фазового центру, на кут 2p фазовий центр опише коло, радіус якого дорівнює максимальній лінійній величині ексцентриситету. В кожному з положень антени виконують вимірювання, необхідні для визначення планових координат точок на земній поверхні з обов'язковим замиканням на початкове положення. Сукупність таких вимірів складає один прийом. Для виконання другого прийому антену повертають, встановлюючи у ті ж самі положення, проти ходу годинникової стрілки. Дані вимірів опрацьовують програмними пакетами фірм виробників GPS-апаратури і з обов'язковим суміщенням початкової та кінцевої точок. У результаті одержують координати точок кола, описаного фазовим центром антени, яке характеризує його лінійний ексцентриситет. На основі визначених координат визначають лінійну і кутову величини ексцентриситету фазового центру кожної антени, які враховують під час визначення планового положення точок на земній поверхні. Ексцентриситет фазового центру референцної антени визначають у такий же спосіб, прийнявши за референцну будь-яку антену з тих, для яких визначали ексцентриситет фазового центру. Результати визначення ексцентриситету фазового центру антени АТ302 GPS-приймача фірми LEICA згідно із запропонованим способом (прийом №1) наведені у табл.1. У стовпчиках (2) та (3) координати восьми положень фазового центра антени, визначених вимірюваннями у прийомі №1. Кут повороту антени a° (стовпчик (6)) - 45°. Щоб визначити лінійну величину ексцентриситету фазового центра для кожного визначеного положення центру (далі точки) складені рівняння Таблиця 1 Результати визначення ексцентриситету фазового центра антени GPS-приймача (прийом №1) №№ положень (1) 1 2 3 4 5 6 7 8 Координати X (мм) Y (мм) (2) (3) 7,4 13,3 3,5 13,2 8,2 5,0 9,6 6,3 10,0 8,1 15,8 7,8 14,8 10,3 11,6 11,1 Xопт.=9,0 Yопт.=10,3 ei (мм) (ei-eonm)2 a° А° Q° (4) 3,4 6,1 5,4 4,1 2,4 7,3 5,8 2,7 (5) 1,69 1,96 0,49 0,36 5,29 6,76 1,21 4,00 (6) 0 45 90 135 180 225 270 315 (7) 117 152 261 278 292 339 360 17 (8) 117 107 171 143 112 114 90 62 Eonm=4,7мм m e=1,7мм (Q сер - Qі )2 Q сер =114° (9) 9 49 3249 841 4 0 576 2704 mQ =33° 2 2 2 ì (X - X ü onm ) + (Y - Yonm ) - e onm = n 1 1 ï 1 ï ï .......... .......... .......... .......... .......... .......... .. ï (1) í ý ï .......... .......... .......... .......... .......... .......... .. ï 2 2 2 ï(X - X ï î n omn ) + (Yn - Yonm ) - e omn = n n þ де: Х1, ..., Хn , Y1, ..., Yn - координати визначених точок; Xonm, Yonm, eonm - координати центра та радіус оптимального кола, яке описує положення визначених точок на площині відповідно; vi - невідомі поправки; n кількість визначених точок. Для визначення параметрів оптимального кола система рівнянь (1) розв'язана за умови (2) å n 2 = min Відстані від визначених точок до центра кола еі, (стовпчик (4)) відшукано за залежністю (3) ei = (Xi - X onm )2 + (Yi - Yonm )2 Середня квадратична похибка визначення лінійної величини ексцентриситету n å (ei - eonm ) me = i=1 2 = å n2 (4) n -1 n-1 Лінійна величина ексцентриситету, визначена за даними прийому е=4,7мм, а середня квадратична похибка її визначення m e=1,7мм. У стовпчику (6) a 0 для усіх виміряних точок представлено величини кутів повороту антени відносно напрямку на північ. У стовпчику (7) за координатами Xonm, Yonm, Х1, ..., Хn, Y1, ..., Yn обчислено азимути напрямків А0 із визначеного центра кола на виміряні точки. Кутова величина ексцентриситету фазового центра за вимірами на кожну точку така (5) Qi = A i - a i Середнє значення Q сер =114°. Середню квадратичну похибку Q сер знайдено за виразом n å (Qсер - Qi )2 mQ = i =1 (6) n -1 mQ =33°. Значення На кресленні представлено обчислене за результатами вимірів розташування положення точок фазового центра в наслідок послідовного обертання антени на заданий кут. Тут же нанесено оптимальне коло обертання фазового центра навколо осі антени із центром С. У табл.2 наведено результати визначення ексцентриситету фазового центру антени АТ-302 LEICA вісьмома прийомами. У стовпчиках (2) та (8) табл.2 приведені результати визначених лінійної е onm та кутової Q° величин ексцентриситету відповідно. Середньовагові значення лінійної е ocm та кутової Q ocm величин ексцентриситету знаходять згідно залежностей Таблиця 2 Результати визначення ексцентриситету фазового центра антени GPS-приймача вісьмома прийомами №№ eonm, m (мм) e прийомів (мм) (1) (2) (3) 1 4,7 1,7 2 5,3 1,5 3 5 2,1 4 5,9 1,5 5 6,6 1,5 6 7,1 1,8 7 4,4 1,5 8 6,7 2,7 å рe eonm.р e (4) 0,35 0,44 0,23 0,44 0,44 0,31 0,44 0,14 2,80 (5) 1,63 2,36 1,13 2,62 2,93 2,19 1,96 0,92 15,74 n e (мм) (6) -0,93 -0,33 -0,63 0,27 0,97 1,47 -1,23 1,07 eocm=5,7мм k å pe i eocm = 1 = i k × eonm åp e = 1 i (7) 0,30 0,05 0,09 0,03 0,42 0,67 0,67 0,16 2,38 m Q ocm = 1 = i m i pQ Q × pQ n0 Q rnn (9) 33 51 22 30 72 21 32 49 (10) 0,0009 0,0004 0,0021 0,0011 0,0002 0,0023 0,0010 0,0004 0,0083 (11) 0,10 0,04 0,25 0,13 0,02 0,25 0,13 0,05 0,96 (12) -1,65 -5,65 3,35 -2,65 2,35 -6,65 15,35 -1,65 (13) 0,00 0,01 0,02 0,01 0,00 0,10 0,23 0,00 0,38 MQ 3o = (7) = 1 i ; m0 Q × Qi å pQ i Q0 (8) 114 110 119 113 118 109 131 114 Q ocm =116о Ме=0,4мм å pQ i rnn i pe = 1 pQ = 1 m2 - ваги результатів визначень з окремих прийомів. Q де: k- кількість виконаних прийомів; , Q ocm приведено у стовпчиках (4, 5, 10, 11). В останньому рядку таблиці 2 приведено остаточні Обчислення е і m2 e ocm значення лінійної та кутової величини ексцентриситету е oc m=5,7мм та Q ocm =116°. Середні квадратичні похибки остаточних значень ексцентриситету обчислюються за залежностями k k å pe n e 2 Me = i=1 i MQ = k (k - 1) × å pe i=1 де: å pQ n Q 2 i n e i = e onm i i ; - e ocm , i=1 i i (8) k (k - 1) × å p Q i=1 i n Qi = Qonm i - Qocm . Результати обчислення Ме і MQ , приведені у стовпчиках (6, 7, 12, 13). Середні квадратичні похибки визначення еocm і Q ocm з восьми прийомів такі Ме=0,4мм і MQ =3°. Очевидно, що величини ексцентриситету фазового центра досить суттєві, тому їх необхідно враховувати під час прецизійних GPS-визначень. Це підвищить точність визначення планових координат точок на земній поверхні.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determining geodesic coordinates of points at the earth surface
Автори англійськоюTretiak Kornyliy Romanovych, Shevchenko Taras Heorhiiovych
Назва патенту російськоюСпособ определения геодезических координат точек на земной поверхности
Автори російськоюТретьяк Корнилий Романович, Шевченко Тарас Георгиевич
МПК / Мітки
МПК: G01C 5/00
Мітки: поверхні, координат, планових, визначення, точок, спосіб, земній
Код посилання
<a href="https://ua.patents.su/4-64097-sposib-viznachennya-planovikh-koordinat-tochok-na-zemnijj-poverkhni.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення планових координат точок на земній поверхні</a>
Спосіб визначення положення точок на земній поверхні
Номер патенту: 42431
Опубліковано: 15.10.2001
Автор: Третяк Корнилій Романович
МПК: G01C 5/00
Мітки: положення, земній, визначення, поверхні, спосіб, точок
Формула / Реферат:
Cпociб визначення положення точок на земній поверхні, який заключається у тому, що проводять польове рекогносцирування місцевості, позначають на місцевості точки геодезичної мережі, обчислюють кількість сесій вимірів, розташовують одночасно не менше трьох систем GPS послідовно у визначених точках геодезичної мережі, проводять виміри i визначають положення точок на земній поверхні, який відрізняється тим, що після позначення на місцевості...
Спосіб визначення положення точок на земній поверхні
Номер патенту: 60573
Опубліковано: 15.10.2003
Автор: Третяк Корнилій Романович
МПК: G01C 5/00
Мітки: положення, земній, визначення, спосіб, поверхні, точок
Формула / Реферат:
Спосіб визначення положення точок на земній поверхні, який полягає у тому, що проводять польове рекогносцирування місцевості, позначають на місцевості точки геодезичної мережі, встановлюють у кожній з них одну систему GPS, визначають нею наближені координати точок мережі, розраховують попередньо точність положення точок, визначають інформативність кожного з векторів вимірів, а також оптимальну схему вимірів максимальної інформативності,...
Прилад для визначення координат постановників завад, працюючих на земній поверхні
Номер патенту: 61209
Опубліковано: 17.11.2003
Автори: Зайківський Олександр Болеславович, Шпаківський Юрій Олександрович, Микитюк Олександр Григорович, Слепов Лев Іванович, Куровська Тетяна Юріївна
Мітки: визначення, земній, координат, постановників, завад, прилад, працюючих, поверхні
Формула / Реферат:
Прилад для визначення координат постановників завад, які працюють на земній поверхні, що містить антенну систему, вхідний контур, підсилювач високої частоти, детектор, підсилювач низької частоти і динамік, який відрізняється тим, що він додатково містить канал виміру дальності, який має випрямляч інформаційного сигналу, прилад лінеаризації залежності комутатор чутливості...
Спосіб визначення координат точок поверхні манекена
Номер патенту: 63491
Опубліковано: 15.01.2004
Автори: Славінська Алла Людвігівна, Мица Вікторія Василівна, Михайловський Юрій Броніславович
МПК: A41H 1/00
Мітки: визначення, точок, манекена, поверхні, спосіб, координат
Формула / Реферат:
Спосіб визначення координат точок поверхні манекена, який здійснюється за допомогою градуйованої платформи з манекеном, що обертається, приводів для обертання манекена та переміщення вертикального стержня, механізму фіксування координат точок, який відрізняється тим, що координати точок поверхні манекена - кут повороту манекена, величина переміщення вертикального стержня з механізмом ролика, відстань від поверхні манекена до осі обертання...
Спосіб визначення планових координат гака візка крана центрального залу атомної електростанції (аес)
Номер патенту: 49198
Опубліковано: 16.09.2002
Автори: Павлюков Сергій Сергійович, Бурачек Всеволод Германович, Середицька Тетяна Валеріївна
МПК: G02B 13/08
Мітки: центрального, візка, планових, гака, координат, електростанції, спосіб, залу, аес, атомної, визначення, крана
Формула / Реферат:
Спосіб визначення планових координат гака візка крана центрального залу атомної електростанції (АЕС), що базується на світловіддалемірних вимірюваннях, який відрізняється тим, що світлові потоки випромінювання двох світловіддалемірів спрямовані по контуру залу до взаємно протилежних кінців крана, де вони змінюють свій напрямок на 90 градусів за допомогою пентагональних відбивачів і направляються назустріч один одному на відбиваючі елементи,...
Попередній патент: Пристрій для кріплення рейки до шпали
Наступний патент: Пожежний гідрант
Випадковий патент: Тренажер для спини