Пристрій для визначення координат рухомого випромінюючого об’єкта
Номер патенту: 46245
Опубліковано: 15.11.2004
Автори: Чигирин Олег Трохимович, Стеріополо Євген Анатолійович, Остапов Анатолій Олександрович, Радченко Октябрина Антонівна, Тітов Валерій Сергійович

Формула / Реферат
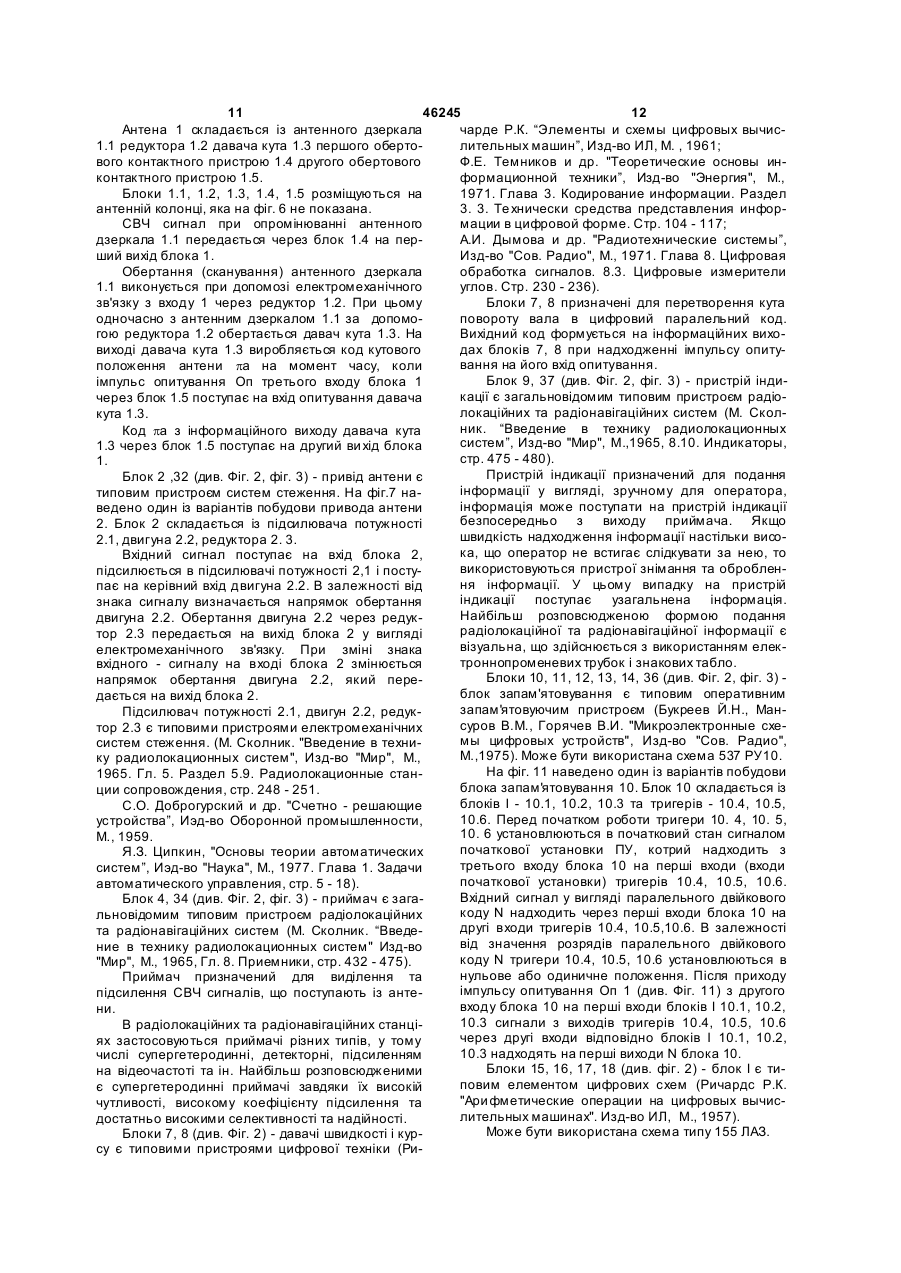
Пристрій для визначення координат рухомого випромінюючого об'єкта, що складається із апаратури ведучого та веденого приймальних пунктів, причому апаратура ведучого приймального пункту містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, перший блок обчислення відстані, датчик швидкості, датчик курсу, пристрій індикації, в якому перший вхід антени через привід антени сполучений з першим виходом датчика сканування антени, перший вихід антени через приймач підключений до першого входу блока визначення кутових координат, другий вихід антени підключений до першого входу датчика сканування антени і до другого входу блока визначення кутових координат, третій вхід, перший та четвертий виходи якого підключені відповідно до другого виходу датчика сканування антени, до першого входу блока обчислення відстані та третього входу датчика сканування антени, причому перший, другий, третій, четвертий, п'ятий, шостий, сьомий входи, перший, другий, третій виходи ведучого приймального пункту сполучені відповідно з другим входом антени, входом датчика швидкості, входом датчика курсу, другим, третім, четвертим і п’ятим входами першого блока обчислення відстані, третім виходом датчика сканування антени, першим і другим входами пристрою індикації, апаратура веденого приймального пункту містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, блок запам'ятовування, формувач керуючих сигналів, в якому перший вхід антени через привід антени сполучений з першим виходом датчика сканування антени, перший вихід антени через приймач підключений до першого входу блока визначення кутових координат, другий вихід антени підключений до першого входу датчика сканування антени і до другого входу блока визначення кутових координат, третій вхід, четвертий, перший та другий виходи якого підключені відповідно до другого виходу та другого входу датчика сканування антени, до першого та другого входів пристрою індикації, третій вхід якого підключений до третього входу датчика сканування антени та виходу блока запам'ятовування, виходи формувача керуючих сигналів веденого приймального пункту з'єднані з відповідними входами датчика сканування антени, блока визначення кутових координат, блока запам'ятовування і пристрою індикації, причому перший, другий входи і перший вихід веденого приймального пункту підключені відповідно до першого входу блока запам'ятовування, другого входу антени та другого виходу блока визначення кутових координат, який відрізняється тим, що в апаратуру ведучого приймального пункту включено перший і другий блоки аналізу, другий блок обчислення відстані, блоки ![]()
![]()
![]()
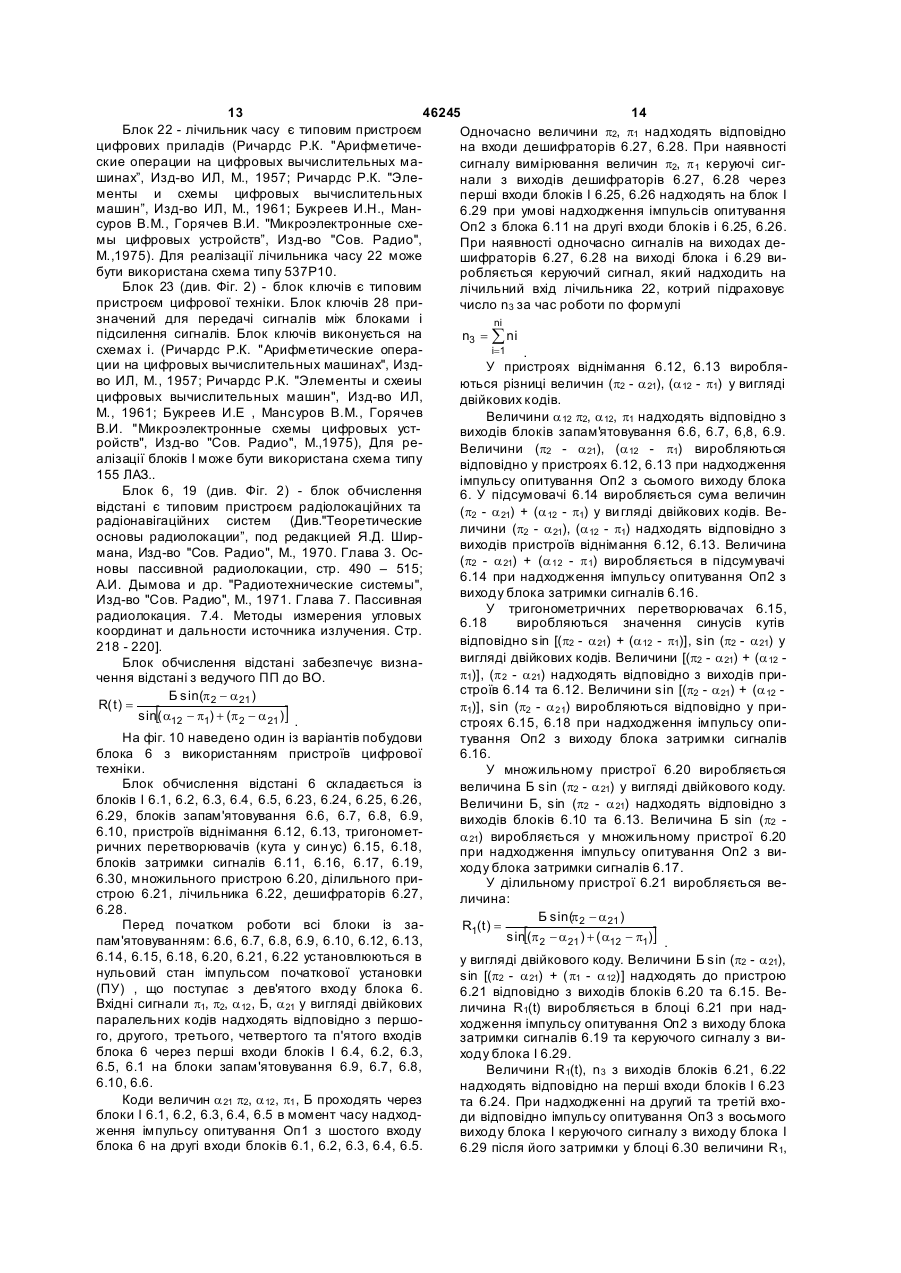
![]() перший, другий, третій, четвертий, п'ятий блоки запам'ятовування, лічильник часу, перший та другий перетворювачі полярних координат у прямокутні, обчислювач приросту прямокутних координат, пристрій вимірювання швидкості, пристрій вимірювання курсу, блок ключів, блок обчислення поточних координат, формувач керуючих сигналів, в якому перший, другий, третій, четвертий, п'ятий, шостий входи, перший, другий, третій, четвертий та п'ятий виходи блока ключів підключені відповідно до першого і другого виходів, першого входу першого блока обчислення відстані, які також відповідно сполучені з першими входами другого та першого блоків аналізу, блока
перший, другий, третій, четвертий, п'ятий блоки запам'ятовування, лічильник часу, перший та другий перетворювачі полярних координат у прямокутні, обчислювач приросту прямокутних координат, пристрій вимірювання швидкості, пристрій вимірювання курсу, блок ключів, блок обчислення поточних координат, формувач керуючих сигналів, в якому перший, другий, третій, четвертий, п'ятий, шостий входи, перший, другий, третій, четвертий та п'ятий виходи блока ключів підключені відповідно до першого і другого виходів, першого входу першого блока обчислення відстані, які також відповідно сполучені з першими входами другого та першого блоків аналізу, блока ![]() вхід першого блока аналізу сполучений також з першим входом блока
вхід першого блока аналізу сполучений також з першим входом блока ![]() та з другим входом другого блока аналізу, до другого виходу блока визначення кутових координат, до першго і другого виходів, до першого і другого входів блока обчислення поточних координат, до першого, другого і третього входів пристрою індикації, четвертий та п'ятий входи якого сполучені відповідно з третім та четвертим входами блока обчислення поточних координат, п'ятий та шостий входи якого сполучені відповідно з виходами давачів швидкості і курсу, вихід першого блока запам'ятовування сполучений з першим входом другого блока обчислення відстані, другий, третій, четвертий, п'ятий входи та перший вихід якого підключені відповідно до третього виходу блока визначення кутових координат, третій вихід якого сполучений також з першим входом блока
та з другим входом другого блока аналізу, до другого виходу блока визначення кутових координат, до першго і другого виходів, до першого і другого входів блока обчислення поточних координат, до першого, другого і третього входів пристрою індикації, четвертий та п'ятий входи якого сполучені відповідно з третім та четвертим входами блока обчислення поточних координат, п'ятий та шостий входи якого сполучені відповідно з виходами давачів швидкості і курсу, вихід першого блока запам'ятовування сполучений з першим входом другого блока обчислення відстані, другий, третій, четвертий, п'ятий входи та перший вихід якого підключені відповідно до третього виходу блока визначення кутових координат, третій вихід якого сполучений також з першим входом блока ![]() до третього, четвертого та п'ятого входів першого блока обчислення відстані, першого входу блока
до третього, четвертого та п'ятого входів першого блока обчислення відстані, першого входу блока ![]() другий вхід якого сполучений з другими входами блоків
другий вхід якого сполучений з другими входами блоків ![]()
![]()
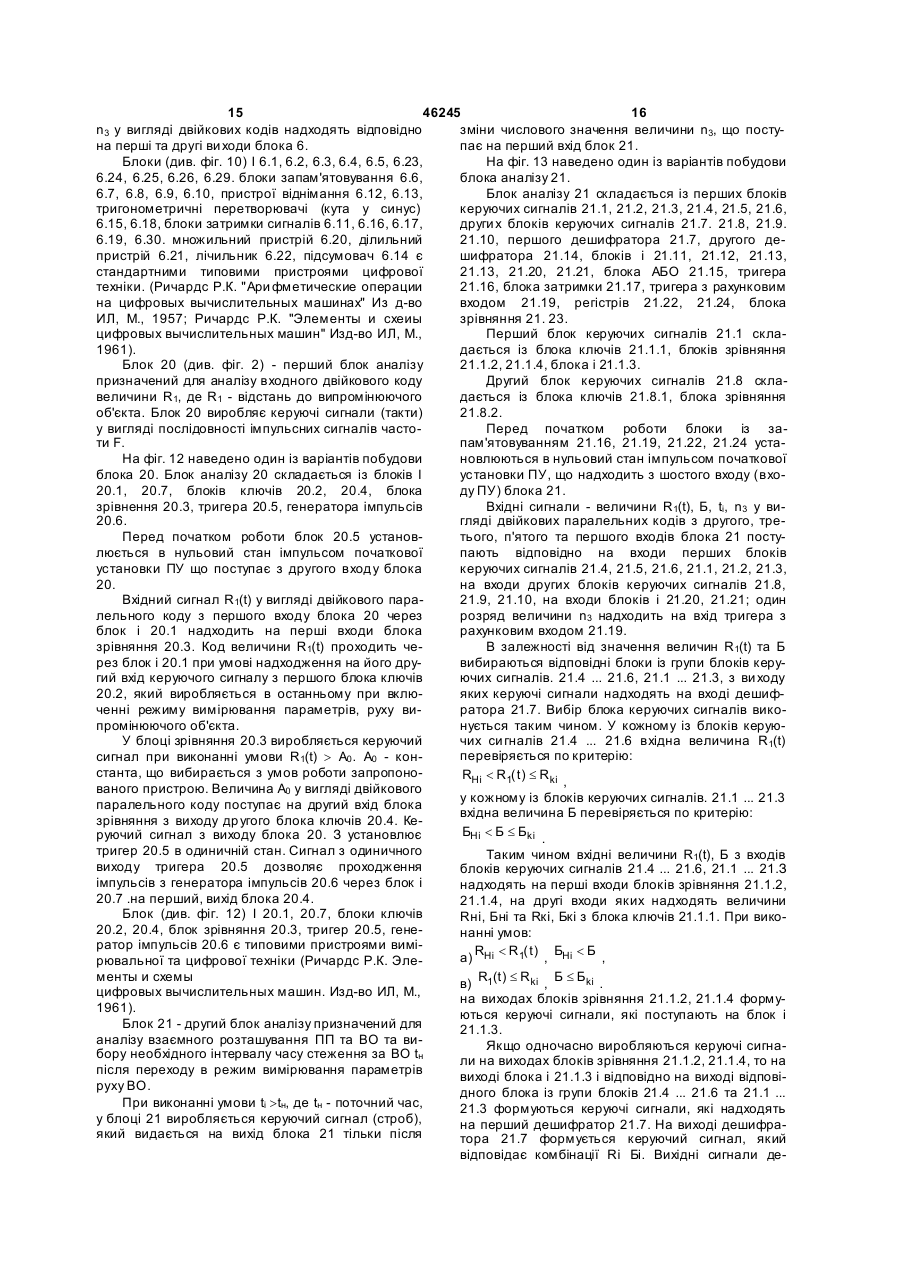
![]() третіми входами першого та другого перетворювачів полярних координат у прямокутні, з п'ятим входом обчислювача приросту прямокутних координат, з шостим входом пристрою вимірювання курсу, з п'ятим входом пристрою вимірювання швидкості, з виходом другого блока аналізу, вихід першого блока аналізу сполучений з першим входом лічильника часу та четвертим входом другого блока аналізу, п'ятий вхід якого підключений до виходу лічильника часу та першого входу пристрою вимірювання курсу, виходи блоків
третіми входами першого та другого перетворювачів полярних координат у прямокутні, з п'ятим входом обчислювача приросту прямокутних координат, з шостим входом пристрою вимірювання курсу, з п'ятим входом пристрою вимірювання швидкості, з виходом другого блока аналізу, вихід першого блока аналізу сполучений з першим входом лічильника часу та четвертим входом другого блока аналізу, п'ятий вхід якого підключений до виходу лічильника часу та першого входу пристрою вимірювання курсу, виходи блоків ![]()
![]() відповідно через четвертий та п'ятий блоки запам'ятовування підключені до першого і другого входів другого перетворювача полярних координат у прямокутні, виходи блоків
відповідно через четвертий та п'ятий блоки запам'ятовування підключені до першого і другого входів другого перетворювача полярних координат у прямокутні, виходи блоків ![]()
![]() відповідно через другий та третій блоки запам'ятовування сполучені з першим та другим входами першого перетворювача полярних координат у прямокутні, перший, другий, третій, четвертий входи, перший та другий виходи обчислювача приросту прямокутних координат підключені відповідно до першого та другого виходів першого та другого перетворювачів полярних координат у прямокутні, другого та третього входів пристрою вимірювання курсу, четвертий та п'ятий входи, перший, другий, третій виходи якого підключені відповідно до виходів датчиків курсу та швидкості, до четвертого входу пристрою індикації, до першого та другого входів пристрою вимірювання швидкості, вихід якого увімкнений до п'ятого входу пристрою індикації, виходи формувача керуючих сигналів ведучого приймального пункту підключені до відповідних входів датчика сканування антени, блока визначення кутових координат, першого і другого блоків обчислення відстані, пристрою індикації, першого, другого, третього, четвертого та п'ятого блоків запам'ятовування, першого і другого блоків аналізу, першого і другого перетворювачів полярних координат у прямокутні, обчислювача приросту прямокутних координат, пристрою вимірювання швидкості, пристрою вимірювання курсу, блока обчислення поточних координат, причому восьмий вхід, четвертий та п'ятий виходи ведучого приймального пункту підключені відповідно до першого входу першого блока запам'ятовування, до перших виходів пристроїв вимірювання курсу та швидкості, на веденому приймальному пункті другий вихід підключено до третього виходу блока визначення кутових координат.
відповідно через другий та третій блоки запам'ятовування сполучені з першим та другим входами першого перетворювача полярних координат у прямокутні, перший, другий, третій, четвертий входи, перший та другий виходи обчислювача приросту прямокутних координат підключені відповідно до першого та другого виходів першого та другого перетворювачів полярних координат у прямокутні, другого та третього входів пристрою вимірювання курсу, четвертий та п'ятий входи, перший, другий, третій виходи якого підключені відповідно до виходів датчиків курсу та швидкості, до четвертого входу пристрою індикації, до першого та другого входів пристрою вимірювання швидкості, вихід якого увімкнений до п'ятого входу пристрою індикації, виходи формувача керуючих сигналів ведучого приймального пункту підключені до відповідних входів датчика сканування антени, блока визначення кутових координат, першого і другого блоків обчислення відстані, пристрою індикації, першого, другого, третього, четвертого та п'ятого блоків запам'ятовування, першого і другого блоків аналізу, першого і другого перетворювачів полярних координат у прямокутні, обчислювача приросту прямокутних координат, пристрою вимірювання швидкості, пристрою вимірювання курсу, блока обчислення поточних координат, причому восьмий вхід, четвертий та п'ятий виходи ведучого приймального пункту підключені відповідно до першого входу першого блока запам'ятовування, до перших виходів пристроїв вимірювання курсу та швидкості, на веденому приймальному пункті другий вихід підключено до третього виходу блока визначення кутових координат.
Текст
Пристрій для визначення координат рухомого випромінюючого об'єкта, що складається із апаратури ведучого та веденого приймальних пунктів, причому апаратура ведучого приймального пункту містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутови х координат, перший блок обчислення відстані, датчик швидкості, датчик курсу, пристрій індикації, в якому перший вхід антени через привід антени сполучений з першим виходом датчика сканування антени, перший вихід антени через приймач підключений до першого входу блока визначення кутови х координат, другий вихід антени підключений до першого входу датчика сканування антени і до другого входу блока визначення кутових координат, третій вхід, перший та четвертий виходи якого підключені відповідно до другого виходу датчика сканування антени, до першого входу блока обчислення відстані та третього входу датчика сканування антени, причому перший, другий, третій, четвертий, п'ятий, шостий, сьомий входи, перший, другий, третій виходи ведучого приймального пункту сполучені відповідно з другим входом антени, входом датчика швидкості, входом датчика курсу, др угим, третім, четвертим і п’ятим входами першого блока обчислення відстані, третім виходом датчика сканування антени, першим і другим входами пристрою індикації, апаратура веденого приймального пункту містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, блок запам'ятовування, формувач керуючих сигналів, в якому перший вхід антени через привід антени сполучений з першим виходом датчика сканування антени, перший вихід антени через приймач підключений до першого входу блока визначення кутових координат, другий вихід антени підключений до першого входу да тчика сканування антени і до другого входу блока визначення 2 (19) 1 3 46245 4 підключені відповідно до третього виходу блока приросту прямокутних координат підключені відвизначення кутови х координат, третій ви хід якого повідно до першого та другого ви ходів першого та другого перетворювачів полярних координат у сполучений також з першим входом блока I1, до прямокутні, друго го та третього входів пристрою третього, четвертого та п'ятого входів першого вимірювання курсу, четвертий та п'ятий входи, блока обчислення відстані, першого входу блока перший, другий, третій виходи якого підключені I2, другий вхід якого сполучений з другими входавідповідно до виходів датчиків курсу та швидкості, до четвертого входу пристрою індикації, до першоми блоків I1, I3, I4 , третіми входами першого та го та другого входів пристрою вимірювання швиддругого перетворювачів полярних координат у кості, вихід якого увімкнений до п'ятого входу припрямокутні, з п'ятим входом обчислювача приросстрою індикації, виходи формувача керуючих ту прямокутних координат, з шостим входом присигналів ведучого приймального пункту підключені строю вимірювання курсу, з п'ятим входом придо відповідних входів датчика сканування антени, строю вимірювання швидкості, з виходом другого блока визначення кутових координат, першого і блока аналізу, вихід першого блока аналізу сполудругого блоків обчислення відстані, пристрою інчений з першим входом лічильника часу та четведикації, першого, другого, третього, четвертого та ртим входом другого блока аналізу, п'ятий вхід п'ятого блоків запам'ятовування першого і другого якого підключений до виходу лічильника часу та блоків аналізу, першого і др угого перетворювачів першого входу пристрою вимірювання курсу, виполярних координат у прямокутні, обчислювача ходи блоків I3, I4 відповідно через четвертий та приросту прямокутних координат, пристрою вимірювання швидкості, пристрою вимірювання курсу, п'ятий блоки запам'ятовування підключені до перблока обчислення поточних координат, причому шого і другого входів другого перетворювача повосьмий вхід, четвертий та п'ятий виходи ведучого лярних координат у прямокутні, ви ходи блоків I1, приймального пункту підключені відповідно до I2 відповідно через другий та третій блоки запапершого входу першого блока запам'ятовування, до перших ви ходів пристроїв вимірювання курсу та м'ятовування сполучені з першим та другим вхошвидкості, на веденому приймальному пункті друдами першого перетворювача полярних координат гий вихід підключено до третього виходу блока у прямокутні, перший другий, третій, четвертий визначення кутових координат. входи, перший та другий виходи обчислювача Пристрій, що пропонується, належить до галузі радіолокаційних і радіонавігаційних вимірювань і може бути використаний при створені пасивних радіолокаційних систем визначення поточних координат рухомих випромінюючих об'єктів (ВО). Відомо, що для визначення місцезнаходження рухомого ВО з використанням пасивних радіолокаційних засобів потрібно виконати вимірювання як мінімум, із двох рознесених у просторі приймальних пунктів (ПП), якщо задача розв'язується на площині, або із більшого числа ПП, якщо задача розв'язується в тривимірному просторі (Див. Теоретические основы радиолокации. Под ред. Я. Д. Ширмана. Изд-во "Сов. Радио". 1970. Гл. 8. Основы пассивной радиолокации, стр. 490 - 516). Рознесені ПП оснащуються лініями зв'язку, які забезпечують обмін даними між ПП та синхронізацію їх роботи. Тріангуляційний метод вимірювання координат ВО базується на вимірюванні кутових напрямків на ВО - пеленгів декількома ПП, рознесеними на деяку відстань, що називається базою. Якщо задача розв'язується в горизонтальній площині, місцезнаходження ВО визначається як точка перетину двох ліній пеленгів. На фіг. 1 наведена геометрична схема, що пояснює розв'язання задачі тріангуляційним методом на площині. Відстані R1 і R2 від ПП 1 і ПП 2 до ВО визначається (Див. "Теоретические основы радиолокации." под ред. Я. Д. Ширман, Изд-во "Сов. Радио". 1970, Гл.8. Основы пассивной радиолокации, стр. 490 - 516; А. И Дымова и др. "Радиотехнические системы" Изд-во "Сов. Радио". 1970, Гл.7. Пассивная радиолокация. 7. 4 Методы измерения угловых координат и дальности источников радиоизлучения, стр. 218 220) згідно з формулами: Б sin(p2 - a 21) R1 = sin[(a12 - p1 ) + (p 2 - a 21 )] , Б sin(a 21 - p1) sin[(a12 - p1) + (p 2 - a 21 )] , де: p1 і p2 - кутові напрямки відповідно з першого та другого ПП на ВО, що відліковуються від напрямку на північ, a 12 і a 21 - кутові напрямки відповідно з першого ПП на другий ПП та другого ПП на перший, що відліковуються від напрямку на північ, Б - відстань між першим і другим ПП (база). Відстані R± і R2 обчислюються на ведучому ПП, на який по лінії зв'язку передається значення p2 яке вимірюється веденим ПП 2. Із лінії зв'язку на ведучий ПП поступають також величини a 12 і a 21, Б для обчислення відстаней R1 і R2. Куто вий напрямок на ВО може бути визначений з використанням різних методів пеленгування (Див. “'Теоретические основы радиолокации" под ред. Я. Д. Ширмана, Изд-во "Сов. Радио". 1970. Гл.5. Измерение угловых координат, стр. 274 324. И. А Кудряшов и др. "Основы радионавигационных устройств” Л. , 1958. Глава 5. Амплитудные радиопеленгаторы, стр. 71 - 107. Глава 9. ФазоR2 = 5 46245 6 вые радионавигационные устройства и системы, рухомого ВО, що обумовлює значні похибки у вистр. 179 - 201). Найпростішим є одноканальний значенні поточних координат рухомого ВО при амплітудний метод пеленгування, що ґрунтується втраті радіоконтакту з ним. на аналізі прийнятих сигналів від ВО за час прохоПри втраті контакту з ВО (в умовах завад, паду діаграмою спрямованості (ДО антени пеленгаузному режимові роботи ВО, виключенні ВО та ін.) тора при її обертанні (скануванні) напрямку на ВО. відбувається застарівання виміряних координат За прототип вибирається пристрій для визнаВО. чення місцезнаходження імпульсного випромінюУ пристрої, що розглядається як прототип, поючого об'єкта, який реалізує тріангуляційний меточні координати ВО обчислюються по формулах: тод визначення координат на площині у ti відповідності з фіг. 1. X12 = R10 sinp10 + ò Vk sinK k dt Пристрій прототипу складається із апаратури t0 , ведучого ПП, що містить антену, привід антени, ti давач сканування антени, приймач, блок визнау12 = R10 cos p10 + ò Vk cos Kk dt чення кутових координат, перший блок обчисленt0 , ня відстані, давач швидкості, давач курсу, пристрій де індикації, в якому перший вхід антени через привід R10, p 10 - значення виміряних відстані і пеленга антени сполучений з першим виходом давача скаВО, нування антени, перший вихід антени через приti - to - час вимірювання, ймач увімкнутий до першого входу блока визнаti - поточний час, чення кутових координат, другий ви хід антени Vк, Кк - швидкість і курс платформи, на якій увімкнутий до першого входу давача сканування встановлені ПП. антени і до другого входу блока визначення кутоФактичний рух рухомого ВО описується форвих координат, третій вхід, перший та четвертий мулами: виходи якого увімкнені відповідно до другого виходу давача сканування антени, до першого входу ti ti * першого блока обчислення відстані та третього X1i = R10 sin p10 + ò Vk sin K k dt + ò Vц sin K цdt входу давача сканування антени, причому перший, t0 t0 , другий, третій, четвертий, п'ятий, шостий, сьомий ti ti входи, перший, другий, третій ви ходи ведучого У *i = R 10 cos p10 + ò Vkcos Kk dt + ò Vц cos K ц dt 1 приймального пункту сполучені, відповідно з друt0 t0 , гим входом антени, входом давача швидкості, де входом давача курсу, другим, третім, четвертим і Vц і Кц - швидкість і курс ВО відповідно, тобто п'ятим входами першого блока обчислення відстав прототипі не враховуються дві останні складові ні, третім виходом давача сканування антени, пеформули (2), які обумовлені рухом ВО. ршим і другим входами пристрою індикації, та Таким чином, у визначення поточних коордиапаратури веденого приймального пункту, що міснат рухомого ВО вносяться похибки: тить антену, привід антени, давач сканування анti ti тени, приймач, блок визначення кутових коордиdХ = ò Vц sin Kц dt dУ = ò Vц cos Kц dt нат, пристрій індикації, блок запам'ятовування, t0 t0 формувач керуючи х сигналів, в яком/ перший вхід ; . антени через привід антени сполучений з першим Метою винаходу, що пропонується, є виходом давача сканування антени, перший вихід підвищення точності визначення координат рухоантени через приймач увімкнутий до першого вхомого ВО в умовах дії завад та при застарюванні ду блока визначення кутових координат, другий даних. вихід антени увімкнутий до першого входу давача Поставлена мета досягається тим, що в присканування антени і до другого входу блока визнастрій для визначення координат ВО, що складачення кутови х координат, третій вхід, четвертий, ється із апаратури ведучого та веденого приймаперший та другий виходи якого увімкнені відповідльних пунктів, апаратура ведучого приймального но до другого виходу та др угого входу давача скапункту містить антену, привід антени, давач сканунування антени, до першого та другого входів привання антени, приймач, блок визначення кутових строю індикації, третій вхід якого увімкнений до координат, перший блок обчислення відстані, датретього входу давача сканування антени та виховач швидкості, давач курсу, пристрій індикації, в ду блока запам ’ятовування, виходи формувача якому перший вхід антени через привід антени керуючих сигналів веденого ПП з'єднані з відповісполучений з першим виходом давача сканування дними входами давача сканування антени, блока антени, перший вихід антени через приймач увівизначення кутових координат, блока запам'ятомкнутий до першого входу блока визначення кутовування, і пристрою індикації, причому перший, вих координат, другий вихід антени увімкнутий до другий входи і перший ви хід веденого приймальпершого входу давача сканування антени і до друного пункту увімкнені відповідно до першого входу гого входу блока визначення кутови х координат, блока запам'ятовування, другого входу антени та третій вхід, перший та четвертий виходи якого другого ви ходу блока визначення кутови х коордиувімкнені відповідно до другого виходу давача нат. сканування антени, до першого входу блока обчиНедоліком цього пристрою є відсутність слення відстані та третього входу давача скануінформації про те, чи рухомий даний ВО, чи ні, а вання антени, причому перший, другий, третій, також відсутність даних про параметри руху для четвертий, п'ятий, шостий, сьомий входи, перший, 7 46245 8 другий, третій виходи ведучого ПП сполучені відка визначення кутових координат, третій вихід якоповідно з другим входом антени, входом давача го сполучений також з першим входом блока i 1, до швидкості, входом давача курсу, другим, третім, третього, четвертого та п'ятого входів першого четвертим і п'ятим входами першого блока обчисблока обчислення відстані, першого входу блока і 2 лення відстані, третім виходом давача сканування , другий вхід якого сполучений з другими входами антени, першим і другим входами пристрою індиблоків і1, і3, і4, з третіми входами першого та другокації, апаратура веденого приймального пункту го перетворювачів полярних координат у прямокумістить антену, привід антени, давач сканування тні, з п'ятим входом обчислювача прирощення антени, приймач, блок визначення кутови х коорпрямокутних координат, з шостим входом придинат, пристрій індикації, блок запам'ятовування, строю вимірювання курсу, з третім входом приформувач керуючих си гналів, в якому перший вхід строю вимірювання швидкості, з виходом другого антени через привід антени сполучений з першим блока аналізу, вихід першого блока аналізу сполувиходом давача сканування антени, перший вихід чений з першим входом лічильника часу та четвеантени через предвиходом давача сканування ртим входом другого блока аналізу, п'ятий вхід антени, перший вихід антени через приймач увіякого увімкнений до виходу лічильника часу та мкнутий до першого входу блока визначення кутопершого входу пристрою вимірювання курсу, вивих координат, другий вихід антени увімкнутий до ходи блоків і3, і4 відповідно через четвертий та першого входу давача сканування антени і до друп'ятий блоки запам'ятовування увімкнені до пергого входу блока визначення кутови х координат, шого і другого входів другого перетворювача потретій вхід, четвертий, перший та другий виходи лярних координат у прямокутні, виходи блоків і 1, і2 якого увімкнені відповідно до другого ви ходу та відповідно через другий та третій блоки запам'ятодругого входу давача сканування антени, до первування сполучені з першим та другим входами шого та др угого входів пристрою індикації, третій першого перетворювача полярних координат у вхід якого увімкнений до третього входу давача прямокутні, перший другий, третій, четвертий вхосканування антени та виходу блока запам'ятовуди, перший та другий виходи обчислювача прировання., виходи формувача керуючих сигналів вещення прямокутних координат увімкнені відповідденого ПП з'єднані з відповідними входами давача но до першого та другого ви ходів першого та сканування антени, блока визначення кутових кодругого перетворювачів полярних координат у ординат, блока запам'ятовування і пристрою індипрямокутні, друго го та третього входів пристрою кації, причому, перший, другий входи і перший вимірювання курсу, четвертий та п'ятий входи, вихід веденого приймального пункту увімкнені відперший, другий, третій ви ходи якого увімкнені відповідно до першого входу блока запам'ятовуванповідно до виходів давачів курсу та швидкості, до ня, другого входу антени та другого виходу блока четвертого входу пристрою індикації, до першого визначення кутових координат, який відрізняється та другого входів пристрою вимірювання швидкотим, що введені: в апаратуру ведучого приймальсті, ви хід якого увімкнений до п'ятого входу приного пункту перший і другий блоки аналізу, др угий строю індикації, виходи формувача керуючих сигблок обчислення відстані, блоки і 1 , і2, і3, i4, перналів ведучого приймального пункту підключені до ший, другий, третій, четвертий, п'ятий блоки запавідповідних входів давача сканування антени, м'ятовування, лічильник часу, перший та другий блока визначення кутових координат, першого і перетворювачі полярних координат у прямокутні, другого блоків обчислення відстані, пристрою інобчислювач прирощення прямокутних координат, дикації, першого, другого, третього, четвертого та пристрій вимірювання швидкості, пристрій вимірюп'ятого блоків запам'ятовування, першого і другого вання курсу, блок ключів, блок обчислення поточблоків аналізу, першого і др угого перетворювачів них координат, формувач керуючи х сигналів, в полярних координат у прямокутні, обчислювача якому перший, другий, третій, четвертий, п'ятий, прирощення прямокутних координат, пристрою шостий входи, перший, другий, третій, четвертий вимірювання швидкості, пристрою вимірювання та п'ятий виходи блоку ключів увімкнені відповідно курсу, блока обчислення поточних координат, придо першого і другого виходів, першого входу перчому восьмий вхід, четвертий та п'ятий ви ходи шого блока обчислення відстані, котрі також відповедучого приймального пункту увімкнені відповідвідно сполучені з першими входами другого та но до першого входу першого блока запам'ятовупершого блоків аналізу, блока і3 , вхід першого вання до перших виходів пристрою вимірювання блока аналізу сполучений також з першим входом швидкості, пристрою вимірювання курсу, на ведеблока і4 та з другим входом другого блока аналізу, ному приймальному пункті другий вихід підключедо другого ви ходу блока визначення кутових коорно до третього виходу блока визначення кутових динат, до першого і другого виходів, до першого і координат. другого входів блока обчислення поточних коорПідвищення точності визначення поточних кодинат, до першого, друго го і третього входів приординат рухомого ВО при втраті радіоконтакту з строю індикації, четвертий та п'ятий входи якого ним в умовах завад та при застаріванні вимірюсполучені відповідно з третім та четвертим входавань координат за період часу tзас , обумовлено ми блока обчислення поточних координат, п'ятий К та шостий входи якого сполучені відповідно з вивимірюванням параметрів руху ВО (к урсу ц та ходами давачів швидкості і курсу, вихід першого V блока запам'ятовування сполучений з першим швидкості ц ), обчисленні прирощень координат входом другого блока обчислення відстані, другий, та подальшому їх використанні при визначенні третій, четвертий, п'ятий входи та перший вихід поточних координат рухомого ВО у відповідності з якого увімкнені відповідно до третього виходу блоформулою (2). 9 46245 10 Для вимірювання параметрів руху ВО введенні На фіг. 19 наведена блок - схема формувача в апаратуру ведучого ПП два блока аналізу, друкеруючих сигналів ведучого ПП 30. гий блок обчислення відстані, чотири блока і, п'ять Пристрій для визначення поточних координат блоків запам'ятовування, два перетворювачі порухомого ВО, що пропонується, складається (див. лярних координат у прямокутні, обчислювач прифіг. 2, фіг. 3): рощення прямокутних координат, лічильник, часу, із ведучого ПП І, що містить антену 1, привід пристрій вимірювання швидкості та пристрій виміантени 2, давач сканування антени 3, приймач 4, рювання курсу. блок визначення кутових координат 5, перший Для вимірювання поточних координат рухомоблок обчислення відстані 6, давач швидкості 7, го ВО введенні в апаратур у ведучого ПП блок давач курсу 8, пристрій індикації 9, блоки запам'я ключів та блок обчислення поточних координат. товування·10, 11, 12, 13, 14, блоки І 15, 16, 17, 18, Для вироблення керуючих сигналів, необхіддругий блок обчислення відстані 19, блоки аналізу 20, 21, лічильник часу 22, перетворювачі полярних К них для визначення параметрів руху ВО (курсу ц координат у прямокутні 23, 24, обчислювач приV рощення прямокутних координат 25, пристрій вита швидкості ц ), обчислення його поточних комірювання курсу 26, пристрій вимірювання швидординат та забезпечення синхронізації роботи кості 27, блок ключів 28, блок обчислення всього пристрою на ведучому ПП введено формупоточних координат 29, формувач керуючих сигвач керуючих сигналів. налів 30, Використання наведених відмітних ознак зі та веденого ПП II, що містить антену 31, призв'язками між ними на ведучому ПП та додаткових від антени 32, давач сканування антени 33, принових зв'язків на веденому ПП не відомо, тому ймач 34, блок визначення кутових координат 35, відповідає критерію “новизна”. блок запам'ятовування 36, пристрій індикації 37, Забезпечення запропонованого пристрою ноформувач керуючи х сигналів 38. вою сукупністю ознак для виконання поставленої Ведучий ПП І має 8 входів: 39, 40, 41, 42, 43, задачі дозволяє стверджувати, що запропонова44, 45, 46 та 5 виходів 47, 48, 49, 50, 51. ний пристрій відповідає умовам патентно здатВедений ПП II має: 2 входи 52, 53 та два вихоності, так як він є новим, має винахідницький ди 54, 55. рівень, та промислове застосування. Сутність виФормувач керуючих сигналів 30 ведучого ПП І находу пояснюється кресленнями, де: (фіг. 19) має 22 виходи ;56 - 77. На фіг. 1 наведена схема визначення поточФормувач керуючих сигналів 38 веденого ПП II них координат рухомого ВО тріангуляційним метомає .9 виходів:78 - 86 Зв'язки формувачів керуюдом на площині. чих сигналів 30 і 38 з блоками ведучого ПП та веНа фіг. 2 наведена блок - схема ведучого ПП деного ПП на фіг. 2 та фіг. 3 не показані для назапропонованого пристрою для визначення коорглядності креслень. динат рухомого ВО. Блок 1, 31 див. фіг. 2, фіг. 3 антена є загальНа фіг. 3 наведена блок - схема веденого ПП новідомим типовим пристроєм радіолокаційних та для визначення координат рухомого БО. радіонавігаційних систем (М. Сколник."Введение в На фіг. 4 наведена часова діаграма роботи технику радиолокационных систем”, Изд-во "Мир", формувача керуючих сигналів ведучого ПП. Μ.,1965. Гл.7. Ан тенны, стр. 317 – 431; Д. Бартон. На фіг. 5 наведена часова діаграма роботи "Радиолокационные системы”, Изд-во МО СССР, формувача керуючих сигналів веденого ПП. Μ., 1967. Глава 9. Измерение угловых координат и На фіг. 6 наведена блок - схема антени 1. сопровождение цели, стр. 268 - 368) На фіг. 7 наведена блок-схема приводу антени Антена 1 31 забезпечує приймання електро2. магнітної енергії бід ВО і передачу її на вхід приНа фіг. 8 наведена блок - схема давача скануймача через антенно-фідерний тракт, переміщенвання антени 3(33). ня діаграми спрямованості (ДС) антени в площині На фіг. 9 наведена блок - схема блока визнасканування та вимірювання кутового напрямку на чення кутови х координат 5. ВО. Характеристики антени забезпечують На фіг. 10 наведена блок - схема блока обчисвимірювання кутового напрямку з необхідною лення відстані 6. точністю. В залежності від призначення системи і На фіг. 11 наведена блок - схема блока зачастотного діапазону застосовуються антени пам'ятовування 10. різних типів: вібраторні, параболічні, рупорні і др. На фіг. 12 наведена блок - схема першого (И. А. Кудряшов и др. “Основы радионавигационблока аналізу 20. ных устройств", Л. ,1958, Глава 4. “Общие харакНа фіг. 13 наведена блок - схема другого блотеристики аппаратуры радионавигационных устка аналізу 21. ройств, стр. 49 - 108). На фіг. 14 наведена блок - схема перетворюПереміщення ДС антени виконується за доповача полярних координат у прямокутні 23. могою електромеханічних чи електронних приНа фіг. 15 наведена блок - схема обчислювача строїв. прирощення прямокутних координат 25. Антени 1. 31 установлюються на дво- чи триНа фіг. 16 наведена блок - схема пристрою координатних поворотних колонках, які керують вимірювання курсу 26. рухом антен по сигналах від систем стержня. На фіг. 17 наведена блок - схема пристрою На фіг. 6 наведено один із варіантів антени 1 з вимірювання швидкості 27. механічним скануванням ДС антени в одній плоНа фіг. 18 наведена блок - схема блока обчисщині. лення поточних координат 29. 11 46245 12 Антена 1 складається із антенного дзеркала чарде Р.К. “Элементы и схемы цифровых вычис1.1 редуктора 1.2 давача кута 1.3 першого обертолительных машин”, Изд-во ИЛ, Μ. , 1961; вого контактного пристрою 1.4 другого обертового Ф.Ε. Темников и др. "Теоретические основы инконтактного пристрою 1.5. формационной техники”, Изд-во "Энергия", Μ., Блоки 1.1, 1.2, 1.3, 1.4, 1.5 розміщуються на 1971. Глава 3. Кодирование информации. Раздел антенній колонці, яка на фіг. 6 не показана. 3. 3. Те хнически средства представления инфорСВЧ сигнал при опромінюванні антенного мации в цифровой форме. Стр. 104 - 117; дзеркала 1.1 передається через блок 1.4 на перА.И. Дымова и др. "Радиотехнические системы”, ший вихід блока 1. Изд-во "Сов. Радио", Μ., 1971. Глава 8. Цифровая Обертання (сканування) антенного дзеркала обработка сигналов. 8.3. Цифровые измерители 1.1 виконується при допомозі електромеханічного углов. Стр. 230 - 236). зв'язку з входу 1 через редуктор 1.2. При цьому Блоки 7, 8 призначені для перетворення кута одночасно з антенним дзеркалом 1.1 за допомоповороту вала в цифровий паралельний код. гою редуктора 1.2 обертається давач кута 1.3. На Вихідний код формується на інформаційних виховиході давача кута 1.3 виробляється код кутового дах блоків 7, 8 при надходженні імпульсу опитування на його вхід опитування. положення антени pa на момент часу, коли Блок 9, 37 (див. Фіг. 2, фіг. 3) - пристрій індиімпульс опитування Оп третього входу блока 1 кації є загальновідомим типовим пристроєм радіочерез блок 1.5 поступає на вхід опитування давача локаційних та радіонавігаційних систем (М. Сколкута 1.3. ник. “Введение в технику радиолокационных Код pа з інформаційного виходу давача кута систем”, Изд-во "Мир", М.,1965, 8.10. Индикаторы, 1.3 через блок 1.5 поступає на другий ви хід блока стр. 475 - 480). 1. Пристрій індикації призначений для подання Блок 2 ,32 (див. Фіг. 2, фіг. 3) - привід антени є інформації у вигляді, зручному для оператора, типовим пристроєм систем стеження. На фіг.7 наінформація може поступати на пристрій індикації ведено один із варіантів побудови привода антени безпосередньо з виходу приймача. Якщо 2. Блок 2 складається із підсилювача потужності швидкість надходження інформації настільки висо2.1, двигуна 2.2, редуктора 2. 3. ка, що оператор не встигає слідкувати за нею, то Вхідний сигнал поступає на вхід блока 2, використовуються пристрої знімання та обробленпідсилюється в підсилювачі потужності 2,1 і постуня інформації. У цьому випадку на пристрій пає на керівний вхід двигуна 2.2. В залежності від індикації поступає узагальнена інформація. знака сигналу визначається напрямок обертання Найбільш розповсюдженою формою подання двигуна 2.2. Обертання двигуна 2.2 через редукрадіолокаційної та радіонавігаційної інформації є тор 2.3 передається на вихід блока 2 у вигляді візуальна, що здійснюється з використанням елекелектромеханічного зв'язку. При зміні знака троннопроменевих трубок і знакових табло. вхідного - сигналу на вході блока 2 змінюється Блоки 10, 11, 12, 13, 14, 36 (див. Фіг. 2, фіг. 3) напрямок обертання двигуна 2.2, який переблок запам'ятовування є типовим оперативним дається на вихід блока 2. запам'ятовуючим пристроєм (Букреев Й.Η., МанПідсилювач потужності 2.1, двигун 2.2, редуксуров В.М., Горячев В.И. "Микроэлектронные схетор 2.3 є типовими пристроями електромеханічних мы цифровых устройств", Изд-во "Сов. Радио", систем стеження. (М. Сколник. "Введение в техниМ.,1975). Може бути використана схема 537 РУ10. ку радиолокационных систем", Изд-во "Мир", М., На фіг. 11 наведено один із варіантів побудови 1965. Гл. 5. Раздел 5.9. Радиолокационные станблока запам'ятовування 10. Блок 10 складається із ции сопровождения, стр. 248 - 251. блоків І - 10.1, 10.2, 10.3 та тригерів - 10.4, 10.5, С.О. Доброгурский и др. "Счетно - решающие 10.6. Перед початком роботи тригери 10. 4, 10. 5, устройства”, Иэд-во Оборонной промышленности, 10. 6 установлюються в початковий стан сигналом М., 1959. початкової установки ПУ, котрий надходить з Я.З. Ципкин, "Основы теории автоматических третього входу блока 10 на перші входи (входи систем”, Иэд-во "Наука", М., 1977. Глава 1. Задачи початкової установки) тригерів 10.4, 10.5, 10.6. автоматического управления, стр. 5 - 18). Вхідний сигнал у вигляді паралельного двійкового Блок 4, 34 (див. Фіг. 2, фіг. 3) - приймач є загакоду N надходить через перші входи блока 10 на льновідомим типовим пристроєм радіолокаційних другі входи тригерів 10.4, 10.5,10.6. В залежності та радіонавігаційних систем (М. Сколник. “Введевід значення розрядів паралельного двійкового ние в технику радиолокационных систем" Изд-во коду N тригери 10.4, 10.5, 10.6 установлюються в "Мир", М., 1965, Гл. 8. Приемники, стр. 432 - 475). нульове або одиничне положення. Після приходу Приймач призначений для виділення та імпульсу опитування Oп 1 (див. Фіг. 11) з другого підсилення СВЧ сигналів, що поступають із антевходу блока 10 на перші входи блоків І 10.1, 10.2, ни. 10.3 сигнали з виходів тригерів 10.4, 10.5, 10.6 В радіолокаційних та радіонавігаційних станцічерез другі входи відповідно блоків І 10.1, 10.2, ях застосовуються приймачі різних типів, у тому 10.3 надходять на перші виходи N блока 10. числі супергетеродинні, детекторні, підсиленням Блоки 15, 16, 17, 18 (див. фіг. 2) - блок І є тина відеочастоті та ін. Найбільш розповсюдженими повим елементом цифрових схем (Ричардс Р.К. є супергетеродинні приймачі завдяки їх високій "Ари фметические операции на цифровых вычисчутливості, високому коефіцієнту підсилення та лительных машинах". Изд-во ИЛ, Μ., 1957). достатньо високими селективності та надійності. Може бути використана схема типу 155 ЛАЗ. Блоки 7, 8 (див. Фіг. 2) - давачі швидкості і курсу є типовими пристроями цифрової техніки (Ри 13 46245 14 Блок 22 - лічильник часу є типовим пристроєм Одночасно величини p2, p1 надходять відповідно цифрових приладів (Ричардс Р.К. "Арифметичена входи дешифраторів 6.27, 6.28. При наявності ские операции на цифровых вычислительных масигналу вимірювання величин p2, p 1 керуючі сигшинах”, Изд-во ИЛ, Μ., 1957; Ричардс Р.К. "Эленали з виходів дешифраторів 6.27, 6.28 через менты и схемы цифровых вычислительных перші входи блоків І 6.25, 6.26 надходять на блок І машин”, Изд-во ИЛ, Μ., 1961; Букреев И.Н., Ман6.29 при умові надходження імпульсів опитування суров В.Μ., Горячев В.И. "Микроэлектронные схеОп2 з блока 6.11 на другі входи блоків і 6.25, 6.26. мы цифровых устройств”, Изд-во "Сов. Радио", При наявності одночасно сигналів на виходах деМ.,1975). Для реалізації лічильника часу 22 може шифраторів 6.27, 6.28 на виході блока і 6.29 вибути використана схема типу 537Р10. робляється керуючий сигнал, який надходить на Блок 23 (див. Фіг. 2) - блок ключів є типовим лічильний вхід лічильника 22, котрий підраховує пристроєм цифрової техніки. Блок ключів 28 причисло n3 за час роботи по формулі значений для передачі сигналів між блоками і ni підсилення сигналів. Блок ключів виконується на n3 = å ni схемах і. (Ричардс Р.К. "Арифметические операi=1 . ции на цифровых вычислительных машинах", ИздУ пристроях віднімання 6.12, 6.13 виробляво ИЛ, Μ., 1957; Ричардс Р.К. "Элементы и схеиы ються різниці величин (p2 - a 21), (a 12 - p1) у вигляді цифровых вычислительных машин", Изд-во ИЛ, двійкових кодів. Μ., 1961; Букреев И.Ε , Мансуров В.Μ., Горячев Величини a 12 p2, a 12, p1 надходять відповідно з В.И. "Микроэлектронные схемы цифровых уствиходів блоків запам'ятовування 6.6, 6.7, 6,8, 6.9. ройств", Изд-во "Сов. Радио", М.,1975), Для реВеличини (p2 - a 21), (a 12 - p1) виробляються алізації блоків І може бути використана схема типу відповідно у пристроях 6.12, 6.13 при надходження 155 ЛАЗ.. імпульсу опитування Оп2 з сьомого виходу блока Блок 6, 19 (див. Фіг. 2) - блок обчислення 6. У підсумовачі 6.14 виробляється сума величин відстані є типовим пристроєм радіолокаційних та (p2 - a 21) + (a 12 - p1) у ви гляді двійкових кодів. Верадіонавігаційних систем (Див."Теоретические личини (p2 - a 21), (a 12 - p1) надходять відповідно з основы радиолокации”, под редакцией Я.Д. Ширвиходів пристроїв віднімання 6.12, 6.13. Величина мана, Изд-во "Сов. Радио", Μ., 1970. Глава 3. Ос(p2 - a 21) + (a 12 - p 1) виробляється в підсумувачі новы пассивной радиолокации, стр. 490 – 515; 6.14 при надходження імпульсу опитування Оп2 з А.И. Дымова и др. "Радиотехнические системы", виходу блока затримки сигналів 6.16. Изд-во "Сов. Радио", Μ., 1971. Глава 7. Пассивная У тригонометричних перетворювачах 6.15, радиолокация. 7.4. Методы измерения угловых 6.18 виробляються значення синусів кутів координат и дальности источника излучения. Стр. відповідно sin [(p2 - a 21) + (a 12 - p1)], sin (p2 - a 21) у 218 - 220]. вигляді двійкових кодів. Величини [(p2 - a 21) + (a 12 Блок обчислення відстані забезпечує визнаp1)], (p 2 - a 21) надходять відповідно з виходів причення відстані з ведучого ПП до ВО. строїв 6.14 та 6.12. Величини sin [(p2 - a 21) + (a 12 Б sin(p 2 - a 21 ) R( t ) = p1)], sin (p2 - a 21) виробляються відповідно у приsin[( a12 - p1) + (p 2 - a 21 )] . строях 6.15, 6.18 при надходження імпульсу опиНа фіг. 10 наведено один із варіантів побудови тування Оп2 з виходу блока затримки сигналів блока 6 з використанням пристроїв цифрової 6.16. техніки. У множильному пристрої 6.20 виробляється Блок обчислення відстані 6 складається із величина Б sin (p2 - a 21) у вигляді двійкового коду. блоків І 6.1, 6.2, 6.3, 6.4, 6.5, 6.23, 6.24, 6.25, 6.26, Величини Б, sin (p2 - a 21) надходять відповідно з 6.29, блоків запам'ятовування 6.6, 6.7, 6.8, 6.9, виходів блоків 6.10 та 6.13. Величина Б sin (p2 6.10, пристроїв віднімання 6.12, 6.13, тригонометa 21) виробляється у множильному пристрої 6.20 ричних перетворювачів (кута у син ус) 6.15, 6.18, при надходження імпульсу опитування Оп2 з виблоків затримки сигналів 6.11, 6.16, 6.17, 6.19, ходу блока затримки сигналів 6.17. 6.30, множильного пристрою 6.20, ділильного приУ ділильному пристрої 6.21 виробляється вестрою 6.21, лічильника 6.22, дешифраторів 6.27, личина: 6.28. Б sin(p 2 - a 21 ) Перед початком роботи всі блоки із заR1(t ) = sin[(p 2 - a 21 ) + ( a12 - p1)] . пам'ятовуванням: 6.6, 6.7, 6.8, 6.9, 6.10, 6.12, 6.13, 6.14, 6.15, 6.18, 6.20, 6.21, 6.22 установлюються в у вигляді двійкового коду. Величини Б sin (p2 - a 21), нульовий стан імпульсом початкової установки sin [(p2 - a 21) + (p1 - a 12)] надходять до пристрою (ПУ) , що поступає з дев'ятого входу блока 6. 6.21 відповідно з виходів блоків 6.20 та 6.15. ВеВхідні сигнали p1, p2, a 12 , Б, a 21 у вигляді двійкових личина R1(t) виробляється в блоці 6.21 при надпаралельних кодів надходять відповідно з першоходження імпульсу опитування Оп2 з виходу блока го, другого, третього, четвертого та п'ятого входів затримки сигналів 6.19 та керуючого сигналу з виблока 6 через перші входи блоків І 6.4, 6.2, 6.3, ходу блока І 6.29. 6.5, 6.1 на блоки запам'ятовування 6.9, 6.7, 6.8, Величини R1(t), n3 з виходів блоків 6.21, 6.22 6.10, 6.6. надходять відповідно на перші входи блоків І 6.23 Коди величин a 21 p2, a 12 , p1 , Б проходять через та 6.24. При надходженні на другий та третій вхоблоки І 6.1, 6.2, 6.3, 6.4, 6.5 в момент часу надходди відповідно імпульсу опитування Оп3 з восьмого ження імпульсу опитування Оп1 з шостого входу виходу блока І керуючого сигналу з виходу блока І блока 6 на другі входи блоків 6.1, 6.2, 6.3, 6.4, 6.5. 6.29 після його затримки у блоці 6.30 величини R1, 15 46245 16 n3 у вигляді двійкових кодів надходять відповідно зміни числового значення величини n3, що постуна перші та другі ви ходи блока 6. пає на перший вхід блок 21. Блоки (див. фіг. 10) І 6.1, 6.2, 6.3, 6.4, 6.5, 6.23, На фіг. 13 наведено один із варіантів побудови 6.24, 6.25, 6.26, 6.29. блоки запам'ятовування 6.6, блока аналізу 21. 6.7, 6.8, 6.9, 6.10, пристрої віднімання 6.12, 6.13, Блок аналізу 21 складається із перших блоків тригонометричні перетворювачі (кута у синус) керуючих сигналів 21.1, 21.2, 21.3, 21.4, 21.5, 21.6, 6.15, 6.18, блоки затримки сигналів 6.11, 6.16, 6.17, други х блоків керуючих сигналів 21.7. 21.8, 21.9. 6.19, 6.30. множильний пристрій 6.20, ділильний 21.10, першого дешифратора 21.7, другого депристрій 6.21, лічильник 6.22, підсумовач 6.14 є шифратора 21.14, блоків i 21.11, 21.12, 21.13, стандартними типовими пристроями цифрової 21.13, 21.20, 21.21, блока АБО 21.15, тригера техніки. (Ричардс Р.К. "Ари фметические операции 21.16, блока затримки 21.17, тригера з рахунковим на цифровых вычислительных машинах" Из д-во входом 21.19, регістрів 21.22, 21.24, блока ИЛ, М., 1957; Ричардс Р.К. "Элементы и схеиы зрівняння 21. 23. цифровых вычислительных машин" Изд-во ИЛ, Μ., Перший блок керуючих сигналів 21.1 скла1961). дається із блока ключів 21.1.1, блоків зрівняння Блок 20 (див. фіг. 2) - перший блок аналізу 21.1.2, 21.1.4, блока і 21.1.3. призначений для аналізу входного двійкового коду Другий блок керуючих сигналів 21.8 склавеличини R1, де R1 - відстань до випромінюючого дається із блока ключів 21.8.1, блока зрівняння об'єкта. Блок 20 виробляє керуючі сигнали (такти) 21.8.2. у вигляді послідовності імпульсних сигналів частоПеред початком роботи блоки із зати F. пам'ятовуванням 21.16, 21.19, 21.22, 21.24 устаНа фіг. 12 наведено один із варіантів побудови новлюються в нульовий стан імпульсом початкової блока 20. Блок аналізу 20 складається із блоків І установки ПУ, що надходить з шостого входу (вхо20.1, 20.7, блоків ключів 20.2, 20.4, блока ду ПУ) блока 21. зрівнення 20.3, тригера 20.5, генератора імпульсів Вхідні сигнали - величини R1(t), Б, tі, n3 у ви20.6. гляді двійкових паралельних кодів з другого, треПеред початком роботи блок 20.5 установтього, п'ятого та першого входів блока 21 постулюється в нульовий стан імпульсом початкової пають відповідно на входи перших блоків установки ПУ що поступає з другого входу блока керуючих сигналів 21.4, 21.5, 21.6, 21.1, 21.2, 21.3, 20. на входи других блоків керуючих сигналів 21.8, Вхідний сигнал R1(t) у вигляді двійкового пара21.9, 21.10, на входи блоків і 21.20, 21.21; один лельного коду з першого входу блока 20 через розряд величини n3 надходить на вхід тригера з блок і 20.1 надходить на перші входи блока рахунковим входом 21.19. зрівняння 20.3. Код величини R1(t) проходить чеВ залежності від значення величин R1(t) та Б рез блок і 20.1 при умові надходження на його друвибираються відповідні блоки із групи блоків керугий вхід керуючого сигналу з першого блока ключів ючих сигналів. 21.4 ... 21.6, 21.1 ... 21.3, з ви ходу 20.2, який виробляється в останньому при вклюяких керуючі сигнали надходять на вході дешифченні режиму вимірювання параметрів, руху виратора 21.7. Вибір блока керуючих сигналів викопромінюючого об'єкта. нується таким чином. У кожному із блоків керуюУ блоці зрівняння 20.3 виробляється керуючий чих си гналів 21.4 ... 21.6 вхідна величина R1(t) перевіряється по критерію: сигнал при виконанні умови R1(t) > A0 . A0 - константа, що вибирається з умов роботи запропоноRHi < R1( t ) £ Rki , ваного пристрою. Величина A0 у вигляді двійкового у кожному із блоків керуючих сигналів. 21.1 ... 21.3 паралельного коду поступає на другий вхід блока вхідна величина Б перевіряється по критерію: зрівняння з виходу др угого блока ключів 20.4. КеБHi < Б £ Бki . руючий сигнал з виходу блока 20. З установлює тригер 20.5 в одиничній стан. Сигнал з одиничного Таким чином вхідні величини R1(t), Б з входів виходу тригера 20.5 дозволяє проходження блоків керуючих сигналів 21.4 ... 21.6, 21.1 ... 21.З імпульсів з генератора імпульсів 20.6 через блок і надходять на перші входи блоків зрівняння 21.1.2, 20.7 .на перший, вихід блока 20.4. 21.1.4, на другі входи яких надходять величини Блок (див. фіг. 12) І 20.1, 20.7, блоки ключів Rні, Бні та Rкі, Бкі з блока ключів 21.1.1. При вико20.2, 20.4, блок зрівняння 20.3, тригер 20.5, гененанні умов: ратор імпульсів 20.6 є типовими пристроями виміа) RHi < R1( t ) , БHi tн, де tн - поточний час, 21.3 формуються керуючі сигнали, які надходять у блоці 21 виробляється керуючий сигнал (строб), на перший дешифратор 21.7. На виході дешифраякий видається на вихід блока 21 тільки після тора 21.7 формується керуючий сигнал, який відповідає комбінації Ri Бі. Вихідні сигнали де 17 46245 18 шифратора 21.7 у вигляді позиційного коду постужувачів 23.17, 23.18, блоків і 23.9, 23.10, 23.14, пають на перші входи дешифратора 21.14. На 23.15, 23.20, 23.21, 23.22, 23.23, формувача коду другі входи деши фратора 21.14 надходять сигнакута 23.13, перших блоків зрівняння 23.16 ... 23.19, ли у вигляді позиційного коду, котрі виробляються други х блоків зрівняння 23.24 ... 23.27. таким чином. Вхідна величина ti з входів блоків Перед початком роботи блоки із закеруючих сигналів 21.8 ... 21.10 надходить на перпам'ятовуванням 23.1, 23.2, 23.3, 23.6, 23.7, 23.8, ший вхід блоків зрівняння 21.8.1, на другі входи 23.13 установлюються в нульовий стан імпульсом яких надходить величина tні з блока ключів 21.8.2. початкової установки ПУ, що надходить з шостого входу (входу ПУ) блока 23. При виконанні умови tі > tні на вході відповідного блока керуючих сигналів 21.8 ... 21.10 Вхідні сигнали - величини R, p у вигляді двійвиробляються керуючі сигнали, котрі через перші кових паралельних кодів з першого і другого вховходи відповідних блоків І 21.11 ... 21.13 надходять дів блока 23 відповідно через перші входи блоків і на другі входи деши фратора 21.14. Керуючі сигна23.15, 23.14 поступають відповідно на регістри ли проходять через блоки і 21.11 ... 21.13 в момент 23.6 і 23.1, де запам'ятовуються. часу надходження на другі входи цих блоків сигКоди величин R, p проходять через блоки і налів ТАКТИ з четвертого входу блока 21. У де23.15, 23.14 при умові надходження на їх другі шифраторі 21.14 формуються керуючі сигнали, які входи керуючого сигналу (строба) з третього входу відповідають комбінації Ri Bi ti. Вихідні сигнали блока 23. дешифратора 21.14 у вигляді позиційного коду У тригонометричних перетворювачах 23.2, через блок АБО 21.15 поступають на одиничний 23.3 виробляються відповідно величини sin p, cos вхід тригера 21.16. Керуючий сигнал з його одиp у вигляді двійкових паралельних кодів по сигнаничноговиходу надходить на перші входи блока лу p, котрий надходить на входи блоків 23.2, 23.3 з 21.18. виходу регістра 23.1. Величини sin p, cos p виробПри надходженні керуючого сигналу з ви ходу ляються відповідно у блоках 23.2, 23.3 при надблока зрівняння 21.23 на другі входи блока і 21.18 ходженні імпульсу опитування Оп1 з четвертого на виході його формується керуючий сигнал входу блока 23. (строб), котрий надходить на вихід блока 21. КеУ перемножувачі 23.8 виробляються величина руючий сигнал з одиничного виходу тригера 21.16 R sin p у вигляді двійкового паралельного коду по через блок затримки 21.17 надходить на нульовий сигналах sin p R, котрі надходять на перші та другі вхід тригера 21.16 і установлює його в нульовий входи блока 23.8 відповідно через блок АБО 23.4 з стан. При цьому на виході блока і 21.18 заборовиходу тригонометричного перетворювача 23.2 і з няється видача керуючого сигналу (строба) на виходу регістра 23.6. вихід блока 21. У перемножувачі 23.7 виробляються величина Керуючий сигнал на виході блока зрівняння R cos p у вигляді двійкового паралельного коду по 21.23 формується з допомогою таких блоків: трисигналах cos p R котрі надходять на перші та другі гера з рахунковим входом 21.19, блоків і 21.20, входи блока 23.7 відповідно через блок АБО 23.5 з 21.21, регістрів 21.22, 21.24, блока зрівняння виходу тригонометричного перетворювача 23.3 і з 21.23. Керуючий сигнал на виході блока зрівняння виходу регістра 23.6. виробляється при умові зміни числового значення Знаки величин R sin p, R cos p в залежності від величини n3. Перші блоки керуючих сигналів 21.1 ... 21.6, величини кута p(0 £ p £ 2 p ) визначається формудругі блоки керуючих сигналів 21.8 ... 21.10, девачем коду 23.13, першими блоками зрівняння шифратори 21.7, 21.14, блоки і 21.11, 21.12, 21.13, 23.16 ... 23.19, другими блоками зрівняння 23.24 ... 21.18, 21.20, 21.21, блок АБО 21.15, тригер 21.16, 23.27, блоками і 23.20 ... 23.23, блоками АБО 23.2 блок затримки 21.17, тригер з рахунковим входом ... 23. таким чином. 21.19, регістри 21.22, 21.24, блок зрівняння 21.23 є Перші блоки зрівняння 23.16 ... 23.19, на перші типовими пристроями цифрової техніки (Ричардс входи яких поступає поточне значення величини Р.К. Элементы и схемы цифровых вычислительp виходу регістра 23.1, а на другі входи ных машин. Изд-во ИЛ, Μ., 1961. Букреев И.Н., p 3 Мансуров В.Μ., Горячев В.И. Микроэлектронные відповідно коди величин 0, 2 , p, 2 p з відповідних схемы цифровых устройств. Изд-во "Сов. Радио", виходів формувача коду 23.13. При виконанні М.,1975). умов: Блок 23, 24 - перетворювач полярних коордиp 3 нат у прямокутні призначений для перетворення £ pi p £ pi 0 £ pi , 2 полярних координат p, R у прямокутні х, у. Блок 23 , p £ pi , 2 виконує перетворення полярних координат p, R у на виходах перших блоків зрівняння 23.16 ... 23.19 прямокутні х, у по формула х: виробляються керуючі сигнали. Другі блоки зрівняння 23.24 ... 23.27, на перші X = R sinp , входи яких поступає поточне значення величини p У = R cos p . з виходу регістра 23.1, а на другі входи відповідно На фіг. 14 наведено один із варіантів побудови p 3 блока 23. коди величин 2 , p, 2 p,2 p з відповідних виходів Перетворювач полярних координат у прямокуформувача коду 23.13. Формувач ходу 23.13 видає тні 23 складається із регістрів 23.1, 23.6, тригоносигнали після надходження імпульсу опитування метричних перетворювачів 23.2, 23,3, блоків АБО 23.4, 23.5, 23.11, 23.12, 23.28 ... 23.31, перемно 19 46245 20 Оп1 з четвертого входу блока 23. При виконанні у вигляді двійкового паралельного коду по сигнаумов: лах Vцх , Vцу котрі надходять на перші та другі вхоp 3 ди відповідно перемножувачів 27.3, 27.4 p£ p£ p 2 , pi £ p , 2 , p £ 2p відповідно з виходів регістрів 27.1, 27.2. на виходах відповідних других блоків зрівняння 2 2 Величини Vцх, Vцу виробляються у перемно23.24 ... 23.27 виробляються керуючі сигнали. жувачах 27.3, 27.4 по сигналу опитування Оп1, При виконанні умов: котрий надходять з четвертого входу пристрою 27. p p 3 0 < pi £ < pi £ p p < pi £ p 2 2 Підсумувач 27.5 виробляє величину Vцх + Vцу у 2 , 2 2 , , вигляді двійкового паралельного коду по сигналах 3 p pсн + D pо , виробляється керуючий сигнал. 2.1 Робота давача сканування антени 3 у pсн - D pi > pсн - D pо підрежимі кругового обертання антени. блоки зрівняння 3.26, 3.27 виробляють керуючі Підрежм роботи 2.1 залається блоком ключів сигнали, які переключають тригер з рахунковим 3.5. На першому виході блока 3.5 формується кевходом 3.20 з одного положення в інше. Керуючий руючий сигнал, котрий надходить на перший вхід сигнал (сигнал реверса) надходить також після блока АБО 3.25 на другий вихід блока 3 (вихід “реp у вигляді блоків і 3.7 і 3.43. При цьому величина верс”). двійкового паралельного коду з ви ходу блока 3.9 через другі входи блока і 3.7 і блоки АБО 3.4, 3.6 Величини pск = pсо + Dp о, p сн = pсо - Dp о у винадходить на другі входи блока 3.10. На виході гляді двійкових паралельних колів виробляються в блока 3.10 виробляється керуючий сигнал, пропідсумувачі 3.30 і пристрої віднімання 3.31 при надходженні на їх перші і другі входи величини порційний величині p , так як величина p A1 з p со з блока запам'ятовування 3.29 і величини Dpо першого входу блока 3 не проходить через блок і 3.43. Величина p надходить на перший вихід блоз блока запам’ятовування 3.23. Величина p со надка 3. ходить з виходу блока, 3.29 через перші входи 2.2 Робота давача сканування антени 3 у блока і 3.42 і блока АБО 3.4і. підрежимі обертання антени у заданому секторі. Величини p сн , p ск виробляються відповідно Підрежим роботи 2.2 задається блокам ключів у блоках 3.30, 3.31 при надходженні імпульсу опи3.5. На другому виході блока 3.5 формується кетування Оп1 з третього входу блока 3. руючий сигнал, котрий надходить на перший вхід блоків і 3.8 і 3.23. При цьому не виробляється сигПри надходженні величини p11 у вигляді нал на першому виході блока 3.5. двійкового паралельного коду з другого входу блока 3 ця величина запам'ятовується в блоці заВеличина pсі з виходу блока АБО 3.40 через другі входи блока і 3.3, блоки АБО 3.6, 3.4 надходять на другі входи блока 3.10, де виробляється величина D = p ci - p A1 , котра у вигляді керуючого пам'ятовування 3.36. При наявності величини p11 у вигляді двійкового паралельного коду на другому вході блока 3 спрацьовує дешифратор 3.33, керуючий сигнал з виходу якого встановлює тригер 23 46245 24 3.32 в одиничний стан. Керуючий сигнал з виходу У блоках віднімання 25.5, 25.6 виробляються тригера 3.32 надходить на входи блоків і 3.35, величини: 3.37, 3.42. Dх = х1 - х 0 , Dу = у1 - у 0 з урахуванням їх знаків у ви гляді двійкових параВеличина p11 з виходу блока 3.36 надходить на входи блоків 3.30, 3.31 через перші входи блока і 3.35 і блок АБО 3.41. Величина p11 також надходить на третій вихід блока 3 через блок і 3.37. При цьому в блоках 3.30, 3.31 виробляються відповідно величини p11 + D po , p11 - Dp o . Подальша робота блока 3 ідентична роботі розглянутій вище, коли блоки 3.30, 3.31 виробляють величини pск = pсо - Dpо , p сн = pсо + Dp о . Величина p11 надходить через блок і 3.37 на третій вихід блока 3 у момент надходження імпульсу опитування Оп1 з третього входу блока 3. Блоки ключів 3.1, 3.5, давач кута 3.2, блоки і 3.3, 3.7, 3.8, 3.16, 3.17, 3.21, 3.22, 3.23, 3.35, 3.37, 3.38, 3.39, 3.42, 3.43, блоки АБО 3.4, 3.6, 3.25, 3.40, 3.41, перетворювач напруга - код 3.9, пристрої віднімання 3.10, 3.15, 3.31, підсумувачі 3.14, 3.30, лічильники 3.18, 3.19, тригер з рахунковим входом 3.20, блоки зрівняння 3.26, 3.27, генетор імпульсів 3.24, блоки запам'ятовування 3.29, 3.28, 3.36, тригер 3.32, дешифратор 3.33 є типовими пристроями цифрової техніки (Ричардс Р.К. "Элементы и схемы цифровых вычислительных машин. Изд-во ИЛ, Μ., 1961. Букреев И.Н., Мансуров В.Μ., Горячев В И. “Микроэлектронные схемы цифровых устройств”.Изд-во "Сов. Радио", М.,1975). Блок 25 - обчислювач прирощення прямокутних координат є типовим пристроєм радіолокаційних та радіонавігаційних систем. Блок 25 призначений для вироблення прирощення прямокутних координат за вибраний інтервал вимірювання, яке виконується згідно з формулами: Dх = х1 - х 0 , Dу = у1 - у 0 На фіг. 15 наведено один із варіантів побудови блока 25. Обчислювач прирощення прямокутних координат 25 складається із блоків запам'ятовування 25.1 ... 25.4, блоків віднімання 25.5, 25.6, блока затримки 25.7, блоків і 25.8, 25.9. Перед початком роботи блоки із запам'ятовуванням 25.1 ... 25.4 установлюються в нульовий стан імпульсом початкової установки ПУ, що надходить з восьмого входу (входу ПУ) блока 25. Вхідні сигнали - величини х0, у0 , х1 , у1 з ура хуванням їх знаків у вигляді двійкових паралельних кодів надходять з першого, другого, третього та четвертого входів блока 25 на перші входи відповідних блоків запам'ятовування 25.1, 25.2, 25.3, 25.4. Величини х0, у0, х1, у1 запам'ятовуються в блоках запам’ятовування 25.1 ... 25.4 при надходженні на їх другі входи імпульсу опитування Оп1 з шостого входу блока 25 і на треті входи імпульсу СТРОБ з п'ятого входу блока 25. лельних кодів при надходженні на входи блока 25.6 величин х1, х0, з виходів блоків 25.1, 25.3 і при надходженні на входи блока 25.6 величин у1, у0, УО з виходів блоків 25.2, 25.4. Величини Δх, Δу виробляються відповідно у блоках віднімання 25.5, 25.6 при надходженні на ці блоки імпульсу опитування Оп1 з виходу блока затримки 25.7. Величини Δх, Δу у вигляді двійкових кодів з виходів блоків 25.5, 25.6 через перші входи відповідно блоків і 25.8, 25.9 надходять на перші і другі виходи блока 25 при надходженні імпульсу опитування Оп2 з сьомого входу блока 25 на другі входи блоків 25.8, 25.9. Блоки запам'ятовування 25.1 ... 25.4 блоки віднімання 25.5, 25.6, блок затримки 25.7, блоки і 25.8, 25.9 є типовими пристроями цифрової техніки (Ричардс Р.К. "Элементы и схемы цифровых вычислительных машин”. Изд-во ИЛ, М, 1961. Букреев И.Ε., Мансуров В.Μ., Горячев В.И. “Микроэлектронные схемы цифровых устройств." Издво "Сов. Радио", М.,1975). Блок 26 (див. Фіг. 2) - пристрій вимірювання курсу рухомого ВО призначений для вимірювання курсу ВО і прямокутних складових його швидкості і виробляє їх згідно з формулами: D x + Vк sinКк × D t Кц = arctd Dу + Vк cos Кк × Dt , Dx + Vк sin Кк × Dt Dt , Dx + Vк cos Кк × Dt = Dt , Vцx = Vцу де: Dх, D у - прирощення ПРЯМОКУТНИХ координат за інтервал часу Δt/ Vк, Кк - швидкість і курс платформи, на якій установлений ПП. Dt - інтервал часу вимірювання параметрів руху Кц . Vцx, Vцу рухомого ВО. На фіг. 16 наведено один із варіантів побудови блока 26. Пристрій вимірювання курсу рухомого ВО 26 складається із блоків і 26.1 ... 26.5, 26.14 ... 26.21, 26.32... 26.35, 26.41, 26.43, 26.48, 26.50 ... 26.54, 26.62 ... 26.64, блоків запам'ятовування 26.6 ... 26.10, тригонометричних перетворювачів 26.11, 26.12, 26.60, перемножувачів 26.22, 26.23, 26.29, 26.30, блоків АБО 26.24, 26.25 ... 26.27, 26.36, 26.37, 26.42, 26.49, 26.55, 26.56, блоків зрівняння 26.23, 26.31, блоків затримки 26.13, 26.39. 26.44, 26.45, 26.57, блоків віднімання 26.38, 26.47, підсумувачів 26.40, 26.46. ділильних пристроїв 26.58, 26.59, 26.61. Перед початком роботи блоки із залам ’ятовуванням: 26.6 ... 26.10, 26.11, 26.12. 26.22, 26.23, 26.29, 26.30, 26.38, 26.40, 26.46, 26.47, 26.58 ... 26.61 установлюються в нульовий стан 25 46245 26 імпульсом початкової установки ПУ, то надходить На входи блока і 26.14 надходять сигнали Δх з дев'ятого входу (входу ПУ) пристрою 26. “+”, sin Кк “+” з виходів відповідно блоків 26.6, 26.11, на входи блока і 26.15 надходять сигнали Dх, Dу, Кк, Vк, Dt у виВхідні сигнали - величини Δх “-”, sin Кк “-” з виходів відповідно блоків 26.6, гляді двійкових паралельних кодів надходять з 26.11. другого, третього, четвертого, п'ятого і першого Сигнали з виходів блоків і 26.14 і 26.15 надхоблока 26 через перші входи відповідних блоків і дять на входи блока АБО 26.24. 26.1 ... 26.5 на блоки запам’ятовування 26.6 ... На входи блока і 26.16 надходять сигнали Δх 26.10. “+”, sin Кк “-” з виходів відповідно блоків 26.6, Величини Dх, Dу, Кк, Vк, Dt запам'ятовуються в 26.11, на входи блока і 26.17 надходять сигнали блоках запам'ятовування 26.6 ... 26.10 при надΔх “-”, sin Кк “+” з виходів відповідно блоків 26.6, ходженні сигналу СТРОБ з шостого входу блока 26 26.11. на другі входи блоків 1 26.1 ... 26. 5. Сигнали з виходів блоків і 26.16 і 26.17 надхоУ тригонометричних перетворювачах 26.11, дять на входи блока АБО 26.25. 26.12 виробляються відповідно величини sin Кк, Знак величини Δх + Vк sin Кк · Δt виробляється соs Кк у вигляді двійкових паралельних кодів при за допомогою блоків 26.31 ... 26.37. надходженні на входи ци х блоків величини Кк з Знак "+" відповідає умовам: виходу блока 26. 9. а) Dх = +D x ; Vк sinКк × D t = + Vк sinК к × Dt , Величини sin Кк. cos Кк вивобляються відповідно в блоках 26.11 26.12 при надходженні б) Dx > Vк sinК к × Dt , Dх = +D x , імпульсу опитування Оп1 з сьомого входу блока 26. в) Dx Vк sinК к × Dt , Dх = -Dx , повідно блоків 26.8, 26.11, на входи блока 26.29 надходять величини Vк cos Кк з виходів відповідно в) Dx Vк sinК к × Dt , личини Vк cos, Δt з виходів відповідно блоків Dx < Vк sinКк × Dt . 26.29, 26.10. Величина Δх + Vк sin Кк · Δt, виробляється в ло сигналах Δх, Vк sin Кк · Δt, які надходять на блоках 26.40 і 26.38 у вигляді двійкового параблок 26.31 відповідно з виходів блоків 26.6 і 26.23, лельного коду. Це обумовлено тим, що величини керуючі сигнали із блока 26.31 надходять відповіΔх і Vк sin Кк · Δt, можуть мати різні знаки. Якщо Δх дно на перші входи блоків і 26.32, 26,35, 26.33, і Vк sin Кк · Δt мають однакові знаки (“+" або "-"), то 26.34. На другі входи блоків і 26.32, 26.35, 26.33, величина Δх і Vк sin Кк · Δt виробляється 26.34 надходять відповідно з виходу "+" блока підсумувачем 26.40. Якщо Δх і Vк sin Кк · Δt мають 26.6, з виходу "+" блока 26.11, з виходу "-“ блока різні знаки, що обумовлено тим, що кут Кк може 26.6, з виходу "-" блока 26.11. змінюватись в діапазоні 0 £ Кк £ 2p, то величина В залежності від виконання умов при формуΔх + Vк sin Кк · Δt виробляється в пристрої ванні, знаків на виходах блоків і 26.32, 26.33 вивіднімання 26.38. При цьому на перші входи блоків робляється знак "+", на вихода х блоків і 26.34, 26.38, 26.40 надходить величина Δх з виходів бло26.35 виробляється знак "-". ка 26.6 на другі входи блоків 26.38, 26.40 надхоСигнали з виходів блоків і 26.32, 26.33 і виходу дить величина Vк sin Кк · Δt з виходів блока 26.23. блока і 26.14 через блок АБО 26.36 надходять на Величина Δх + Vк sin Кк · Δt, ви ходів блоків вхід "+” ділильного пристрою 26.58. 26.38, 26.40 відповідно через перші входи блока і Сигнали з виходів блоків і 26.34, 26.35 і виходу 26.41 і блок АБО 26.42 та через перші входи блока блока і 26.15 через блок АБО 26. 37 надходять на і 26. 43 і блок АБО 26. 42 надходять на перші вховхід "-“ ділильного пристрою 26.58. ди ділильного пристрою 26.58. На другі входи Величина Δх + Vк sin К · Δt = Δх’ виробляється блоків і 26.41, 26.43 надходять керуючі сигнали у блоках 26.38, 26.40 при надходженні імпульсу відповідно з виходів блоків АБО 26.24 та 26.25, опитування Оп1 з сьомого входу блока 26 через котрі дозволяють проходження величини Δх + Vк блоки затримки 26.13, 26.39, 26. 44. Beличина Δу + sin Кк · Δt, з блока 26.38 або з блока 26.40. Vк cos Кк · Δt = Δу’ виробляється ідентично велиКеруючі сигнали на виходах блоків АБО 26.24 і чині Δх’ в блоках 26.46 ... 26.50, 26.13 ... 26.21, 26. 26.25 виробляються таким чином. Група блоків і 26, 26.27. 26.14 і 26.15 виробляє керуючий сигнал за умови, Знак величини Δу' "+", “-“ виробляється коли величини Δх і Vк sin Кк · Δt, мають однакові ідентично тому, як він виробляється для величини знаки ("+" або "-"), гр упа блоків і 26.16 і 26.17 виΔх’ за допомогою блоків 26.28, 26.51 ... 26.56. B робляє керуючий сигнал за умови, коли величини личина Δу + Vк cos Кк · Δt з виходу блока АБО Δх і Vк sin Кк · Δt мають різні знаки ("+", "-" або " -", 26.49 надходять на вхід ділильного пристрою “+"). 26.59. 27 46245 28 Знак величини Δу + Vк cos Кк · Δt “+” чи "-" x(t ) = x o + Vк sin Кк × Dt + Vц sin Кц × D , надходять з виходів блоків АБО 26.55, 26.56 на у(t ) = у o + Vк cos Кк × Dt + Vц cos Кц × D входи "+”, "-“ ділильного пристрою 26.59. , Величини: ±( Dх + Vк sin Кк × D t R( t ) = [x(t )]2 + [у( t )]2 , Vцх = Dt , x( t ) p(t ) = arctg ±( Dу + Vк cos Кк × Dt у( t ) , Vцу = Dt виробляються у вигляді двійкових паралельних де: xo = Ro sinp o , кодів у блоках 26.53, 26.59 по сигналах (Δх + Vк sin К · Δt), Δt і (Δу + Vк cos Кк · Δt), Δt. (ьд+УксвзК* ·δ£) , At. Сигнали (Δх + Vк sin К · Δt), Δt надходять на блок 26.58 з виходів блоків 26.42 і 26.10, сигнали (Δу + Vк cos Кк · Δt), Δt. надходять на блок 26.59 з виходів блоків 26.49 і 26.10. V ,V Величини цх цу виробляються у блоках 26.58, 26.59 при надходженні імпульсу опитування Оп1 з блока затримки 26.45. V V ± цх , Кц = arctg цх Vцу Vцу Величини виробляються у вигляді двійкових паралельних кодів відповідно у блоках 26.61, 26.60. На входи блока 26.61 надходять сигнали Vцх , Vцу відповідно з виходів блоків 26.58, 26.59. На входи блока 26.60 надходять сигнали з виходу блока 26.61. Vцх V , К ц = arctg цх Vцу Vцу Сигнали виробляються відповідно у блоках 26.61, 26.60 при надходженні імпульсу опитування Оп1 з блока затримки 26.57. К ,V ,V Вихідні сигнали ц цх цу з виходів відповідно блоків 26.60, 26.55, 26.50 через перші входи відповідно блоків і 26.62, 26.60, 26.63 надходять відповідно на перший, другий, третій виходи блока 26. Сигнали проходять через блоки і 26.62, 26.63. 26.64 при надходженні на другі входи блоків і 26.62, 26.63, .26.64 імпульсу опитування Оп2 з восьмого входу блока 26. Блоки і 26.1 ... 26.5, 26.14 ... 26.21, 26.32 ... 26.35, 26.41, 26.43, 26.48, 26.50 ... 26.54, 26.62 ... 26.64, блоки запам’ятовування 26.6 ... 26.10, тригонометричні перетворювачі 26.11, 26.12, 26.60, перемножувачі 26.22, 26.23, 26.29, 26.30, блоки АБО 26.24, 26.25 ... 26.27, 26.36, 26.37, 26.42, 26.49, 26.55, 26.56, блоки зрівнення 26.28, 26.31, блокив затримки 26.13, 26.39, 26.44, 26.45, 26.57, блоки віднімання 26.38, 26.47, підсумувачі 26.40, 26.46, ділильні пристрої 26.58, 26.59, 26.61 є типовими пристроями цифрової техніки (Ричардс Р.К. "Элементы и схемы цифровых вычислительных машин” Изд-во ИЛ, Μ., 1961. Букреев И Η., Мансуров В,Μ., Горячев В.И. "Микроэлектронные схемы цифровых устройств” Изд-во "Сов. Радио", М.,1975), Блок 29 (див. Фіг. 2) - блок обчислення поточних координат є типовим пристроєм радіолокаційних та радіонавігаційних систем. Блок 29 призначений для вироблення поточних координат рухомого ВО, яке виконується згідно з формулами: уo = Ro cos p o , Dt інтеграл часу. На фіг. 18 наведено один із варіантів побудови блока 29. Блок обчислення поточних координат 29 складається із блоків запам'ятовування 29.1, 29.4, 29.12, 29.16, 29.21, 29.25, тригонометричних перетворювачів 29.2, 29.5, 29.13, 29.17, 29.22, 29.26, 29.40, перемножувачів 29.3, 29.6, 29.14, 29.15, 29.18, 29.19, 29.23, 29.24, 29.27, 29.28, 29.31, 29.33, блоків затримки 29.7, 29.9, 29.10, 29.32, 29.34, 29.35, 29.39, підсумувачів 29.10, 29.20, 29.29, 29.30, 29.36, лічильника часу 29.11, блока добування квадратного кореня 29.37, ділильного пристрою 29.38, блоків І 29.41, 29.42, тригера 29.43, генератора імпульсів 29.44, блока АБО 29.45. Перед початком роботи блоки із запам'ятовуванням 29.1 ... 29.6, 29.10, 29.12 ... 29.31, 29.33, 29.36, 29.37, 29.38, 29.40, 29.43 установлюються в нульовий стан імпульсом початкової установки ПУ, що надходить з десятого входу (входу ПУ) блока 29. R , p , V ,К , V , К Вхідні сигнали - величини c o ц ц к к у вигляді двійкових паралельних кодів надходять з першого, другого, третього, четвертого, п'ятого та шостого входів блока 29 на перші входи відповідних блоків запам'ятовування 29.1, 29.4, 29.21, 29.25, 29.12, 29.26. Величини R c , p o, Vц , Кц , Vк , Кк запам'ятовуються у блоках запам'ятовування 29.1, 29.4, 29.21 , 29.25, 29.12, 29.16 при надходженні імпульсу опитування Оп1 з сьомого входу блока 29. У тригонометричних перетворювачах 29.2, 29.5, 29.13, 29,17, 29.22, 29.26 виробляються відповідно величини: sin pc , cos po , sinК к , cos Кк , sinК ц , cos Кц у вигляді двійкових паралельних кодів при надходженні на входи блоків 29.2, 29.5 величини p o , з виходу блока 29.4, на входи блоків 29.13, 29.17 величини Кк з ви ходу блока 29.16, на входи блоків К 29.22, 29.26 величини ц з ви ходу блока 29.25. Величини sin pc , cos po , sinК к , cos Кк , sinК ц , cos Кц виробляються відповідно у блоках 29.2, 29.5, 29.13, 29.17, 29.22, 29.26 при надходженні імпульсу опитування Оп2 з восьмого входу блока 29. У перемножувачах 29.3, 29.6, 29.14, 29.18, 29.23, 29.27, 29.15, 29.19, 29.24, 29.28 виробляються відповідно величини 29 46245 30 + V D t, Vц Dt R o sin po , R o cos p o, Vк sin Кк , Vк cos К к , Vц sinК ц , Vц cos Кц , Vк sin К(R o sinкpcosVк sin,Ккц× Dt ),Кцц×sin Кц ×cos Кц × Dt чини к × Dt, V o Кк × D t V sin з виходів у вигляді двійкових паралельних кодів. При цьому відповідно блоків 29.10, 29.24; на входи блока на входи блока 29.3 надходять величини Ro sin po 29.29 надходять величини Ro cos po , Vк cos Кк × D t з з виходів відповідно блоків 29.1, 29.2; на входи виходів відповідно блоків 29.6, 29.19; на входи блока 29.30 надходять величини Ro cos p o з виблока 29.6 надходять величини (R o cos po + Vк cos Кк × D t ), Vц cos Кц × D t ходів відповідно блоків 29.1. 29.5; на входи блока з виходів Vк sinКк з виходів відповідно блоків 29.29, 29.28; на входи блока 29.14 надходять величини 29.31 надходить величина відповідно блоків 29.12, 29.13, на входи блока = R o sin p o + Vк sin Кк × D t + Vц sinК ц × Dt х (t ) з виходу 29.18 надходять величини Vк cos К к з виходів блока 29.20; на входи блока 29.33 надходить вевідповідно блоків 29.12, 29.17; на входи блока личина Vц sinК ц 29.23 надходять величини з виходів у(t ) = R o cos po + Vк cos Кк × D t + Vц cos Кц × Dt з вивідповідно блоків 29.21, 29.22; на входи блока ходу блока 29.30: на входи блока 29.33 надходять Vц cos Кц 29.27 надходять величини з виходів величини х(t ), у(t ) з ви ходів відповідно блоків відповідно блоків 29.21, 29.26; на входи блока 29.20 і 29.30; на входи блока 29.36 надходять ве2 2 29.15 надходять величини Dt × Vк sinКк з виходів личини [ х( t )] , [ у(t )] відповідно з виходів блоків відповідно блоків 29.11, 29.14; на входи блока 29.31, 29.33;на входи блока 29.37 надходить вели2 2 29.19 надходять величини Dt × Vк cos Кк з виходів чина [ х( t)] + [ у(t )] з виходу блока 29.36; на входи відповідно блоків 29.11, 29.18; на входи блока блока 29.40 надходить величина х(t ) : у(t ) з винаDt × Vц sin Кц 29.24 надходять величини з виходів ходу блока 29.38. відповідно блоків 29.11, 29.23; на входи блока Beличини: Dt × Vц cos К ц R o sin po + Vк sinК к × Dt, х(t ) = R o sin p o + Vк sin Кк × Dt + Vц sin Кц × Dt 29.28 надходять величини з ви ходів відповідно блоків 29.11, 29.27. , Величини R o cos po + Vк cos К к × Dt, у( t ) = R o cos p o + Vк cos Кк × D t + Vц cos Кц × Dt R o sin po , R o cos p o, Vк sin Кк , Vк cos К к , Vц sinК ц , Vц cos Кц , Vк sin Кк × Dt, Vк cos Кк × D t, Vц sin Кц × D t, Vц cos Кц × Dt , виробляються відповідно у блоках 29.3, 29. 6, 2 2 2 2 [ х( t )] , [ у(t )] , [ х( t)] + [ у(t )] , х(t ) : у(t ) , R( t) , 29.14, 29.18, 29.23, 29.27, 29.15, 29.19, 29.24, 29.28 при надходженні на їх входи імпульсу опитування p(t ) виробляються відповідно у блоках 29.10, Оп2 э восьмого входу блока 29. 29.20, 29.29, 29.30, 29.31, 29.32, 29.38, 29.36, Величина Δt на виході блока 29.11 фор29.37, 29.40 при надходженні імпульсу опитування мується таким чином. При надходженні сигнала Оп2 з восьмого входу блока 29, котрий надходить ПУ з десятого входу блока 29 через блок АБО після проходження блоків затримки. 29.4.5 на нульовий вхід лічильника 29.11 останній Величини R( t) , p(t ) у ви гляді двійкових кодів з установлюється в нульовий стан. Сигналом з первиходів блоків 29.37, 29.40 через перші входи відшого входу блока 29 тригер 29.43 установлюється повідно блоків 29.41, 29.42 надходять на перший в одиничний стан. та другий ви ходи блока 29 при надходженні імпуКеруючий сигнал з одиничного виходу тригера льсу опитування Оп3 з дев'ятого входу блока 29 29.43 надходить на генератор 29.44, при цьому на другі входи блоків І 29.41, 29.42. вихідні сигнали генератора у вигляді послідовності Блоки запам'ятовування 29.1, 29.4, 29.12, імпульсів частоти F надходять на рахунковий вхід 29.16, 29.21,29.25, тригонометричні перетворювачі лічильника 29. 11, на виході якого формується 29.2, 29.5, 29.13, 29.17, 29.22, 29.26, 29.40, передвійковий паралельний код Δt. множувачі 29.3, 29.6, 29.14, 29.15, 29,11, 29.19, У блоках 29.10, 29.20, 29.29, 29.36, 29.31, 29.23, 29.24, 29.27. 29.28, 29.31, 29.33, блоки за29.33, 29.38, 29.36, 29.37, 29.40 виробляються тримки 29.7, 29.9, 29,10, 29.32, 29.34, 29.35, 29.39, відповідно величини: підсумувачі 29.10, 29.20, 29.29. 29.30, 29.36, R o sin po + Vк sinК к × Dt, х(t ) = R o sin p o + Vк sin Кк × Dt + Vц sin Кц × Dt лічильника часу 29.11, блок добування квадратно, го кореня 29.37, ділильний пристрій 29.38, блоки і R o cos po + Vк cos К к × Dt, у( t ) = R o cos p o + Vк cos Кк × D t + Vц 29.41, × Dt cos Кц 29.42, тригер 29.43, генератор імпульсів 29.44, блок AБО 29.45 є типовими пристроями , цифрової техніки (Ричардс Р.К. "Элементы и схе[ х ( t )] 2 , [ у ( t )] 2 , х ( t ) : у ( t ), [ х ( t )] 2 + [ у ( t )] 2 , мы цифровых вычислительных машин”. Изд-во ИЛ. М.,1961. Букреев И.Н., Мансуров В.Μ., ГоряR( t ) = [ х( t )]2 + [ у( t )]2 чев В.И. "Микроэлектронные схемы цифровых , p(t ) = arctg(х( t ) : у( t )) устройств”. Изд-во "Сов. Радио", М.,1975), у вигляді двійкових паралельних кодів. При цьому Блок 30 (див. Фіг. 2) - (формувач керуючи х на входи блока 29.10 надходять величини сигналів є типовим пристроєм радіолокаційних та Ro sinp o , Vк sin po × D t, з виходів відповідно блоків радіонавігаційних систем. Блок 30 призначений 29.3, 29.15; на входи блока 29.20 надходять велидля вироблення синхронізуючих сигналів, які син 31 46245 32 хронізують роботу складових частин пристрою, що робляє сигнали, які синхронізують роботу складозаявляється. вих частин пристрою, що заявляється. Блок 30 виробляє такі сигнали: На фіг. 5 наведені часові діаграми роботи блосигнал початкової установки ПУ, ка 38. По часовим діаграмам можна по законам сигнал часу (паралельний двійковий код), формальної логіки синтезувати формувач керуюсигнали опитування. чих сигналів 38. На фіг. 19 наведено один із варіантів побудови Блок 38 є типовим пристроєм цифрової блока 30. техніки (Пелегрен М. “Электронные вычислительФормувач керуючих сигналів 30 складається ные машины аналоговые и цифровые”. Изд-во із: генератора імпульсів 30.1, ділильника частоти "Ма шиностроение", М., 1964, стр. 126 ... 129, рис. 30.2, тригерів 30.3, 30.11, блока затримки 30.4, 6.11 ... 6.12), до складу якого входять генератор блоків і 30.5, 30.6, 30.9. лічильників 30.7. 30.10, імпульсів, ділильник частоти, лічильники та дедешифраторів 30.8, 30.12. Формувача сигналів шифратори, які видають керуючі сигнали для син30,13, диференціруючого пристрою 30.14. хронізації роботи всього пристрою в задані моменНа фіг. 4 наведені часові діаграми вихідних ти поточного часу. сигналів формувача керуючих сигналів 30, у Блок 5, 35 - блок визначення кутови х коордивідповідності з якими блок зо виробляє сигнали на нат є типовим пристроєм радіолокаційних та 1 - 22 виходах. радіонавігаційних систем (Див."Теоретические Сигнали з генератора імпульсів 30.1, через основы радиолокации" под редакцией Я.Д. Ширділильник частоти 30.2 надходять на перші входи мана. Изд-во "Сов. Радио", Μ., 1970. Глава 5. Изблоків І 30.5, 30,9 і на одиничний вхід тригера 30.3. мерение угловых координат, стр. 274 - 324. ; КудКеруючий сигнал з одиничного виходу тригера ряшов И.А. и др. "Основы радиолокационных 30.3 надходить на лічильник 30.7 і установлює устройств” Л.,1958. Глава 5. Амплитудные пеленйого в нульовий стан, а також надходить на пергаторы, стр. 71-107. Глава 9. Фазовые радионавиший вхід блока і 30.6 і через блок затримки 30.4 гационные устройства, стр. 179 - 201). поступає на другий вхід блока І 30.5. Після цього Блок визначення кутових координат 5, 35 засигнали генератора імпульсів 30.1 через блок І безпечує для вибраного методу пеленгування 30.5 надходять на рахунковий вхід лічильника визначення кутового напрямку на ВО за одне про30.7. Через m тактів дешифратор 30.8 з вихідного ходження діаграми спрямованості антени 1 насигналу лічильника 30.7 формує керуючий сигнал, прямку на ВО методом аналізу обвідної діаграми котрий надходить на другий вхід блока І 30.6, на спрямованості антени по формулі: виході якого формується керуючий сигнал, який m установлює тригер 30.11 в одиничний стан. Сигнал p Ai з одиничного виходу тригера 30.11 через дифеj =1 ренціруючий пристрій 30.14. надходить на перший pn = вихід (ви хід початкової установки ПУ) блока 30. m Сигнал з одиничного виходу тригера 30.11 також і визначення зглаженого значення кутового нанадходить на другий вхід блока І 30.9 і на нульопрямку на ВО за n сканувань антени 1 по формулі: вий вхід лічильника 30.10. Після цього сигнали від dp p1 = p01 + 1 t генератора імпульсів 30.1 проходять через блок і dt . 30.9 на рахунковий вхід лічильника 30.10. На виЗглажування виконується методом найменших ході лічильника 30.10 формується поточний код квадратів (Meлентьев Л В. "Приближенные вычисчасу у вигляді двійкового паралельного коду ti. ления." Изд-во "Физико-математическая литератуКод часу з блока 30.10 надходить на другий ра". М., 1962. Глава XІ. Эмпирические формулы. 7. вихід блока 30, а також на дешифратор 30.12 ДеПрименение метода наименьших квадратов в слушифратор 30.12 формує керуючі сигнали для чае задания последовательности точек). Система формування сигналів опитування 3 - 22 згідно з нормальних рівнянь має вигляд: часовою діаграмою (фіг. 4). Дешифратор 30.12 å формує також сигнал цикла роботи лічильника 30.10, котрий установлює тригер 30.11 в нульовий стан. Після цього знов формується сигнал початкової установки ПУ і подальша робота проходить ідентично описаній вище. Генератор імпульсів 30.1, ділильник частоти 30.2, тригери 30.3, 30.11, блок затримки 30.4, блоки І 30.5, 30.6, 30.9, лічильники 30.7, 30.10, дешифратори 30.8, 30.12, формувач сигналів 30.13, диферентруючий пристрій 30.14 є типовими пристроями цифрової техніки (Ричардс Р.К.''Элементы и схемы цифровых вычислительных машин”. Изд-во ИЛ, М., 1961. Вукреев И.Н. Мансуров В.Μ., Горячев В.И. "Микроэлектронные схемы цифровых устройств”. Изд-во. "Сов. Радио", Μ., .1975). Блок 33 (див. фіг. 3) формувач керуючих сигналів веденого приймального пункту. Блок 30 ви p 01n + n1 d p1 dt n1 n1 å tj =å p1 j j =1 j =1 , n1 n1 dp p01 å tj + 1 å t 2 =å p1jtj j dt j=1 j =1 j=1 , p1j - пеленг на ВО за одно сканування антени, де: tj - момент вимірювання пеленга, n - число вимірювань пеленга, по яким проводиться згладжування. dp po1, 1 dt визначаються із системи Невідомі нормальних рівнянь згідно з формулами: a b -a b p01 = 22 1 12 2 a11a22 - a12 a12 , 33 dp1 a11b1 - a12 b1 = dt a11a22 - a12a12 , n1 a11 - å j 46245 34 ляється керуючий сигнал, котрий поступає на другі входи блока і 5.9 і через дешифратор 5.5 на другі входи блока і 5.2. При цьому забороняється проходження величини p Ai з виходу блока 5. 4 через j =1 де: , j - 1 при вимірюванні пеленга за одне сканування антени і, j = 0 при відсутності вимірювання пеленга за це сканування; n1 n1 a12 = å tj j=1 b1 = å p1j j=1 , n1 , n1 a22 = å t 2 j b2 = å p1jtj j=1 , , На Фіг. 9 наведено один із варіантів побудови блока 5 з використанням блоків цифрової те хніки. Блок визначення кутових координат 5 складається із: блоків і 5.1 ... 5.З, 5.9, 5.10, 5.13, 5.19, 5.25, 5.31, 5.33, 5.39, 5.54 ... 5.56; блоків запам’ятовування 5.4, 5.6 ... 5.3, 5.14; дешифраторів 5.5, 5.30; підсумувачів 5.11, 5.16, 5.34, 5.36, 5.38, 5.40, 5.51; блоків зрівняння 5.12, 5.17, 5.18; блоків АБ0 5.15, 5.23, 5.27, 5.29; ділильних пристроїв 5.20, 5.47, 5.53; блоків затримки 5.21, 5,24, 5.26, 5.28, 5.57; лічильників 5.22, 5.32: перемножувачів 5.35, 5.37, 5.41, 5.43, 5.44, 5.46, 5.48, 5.50, 5.52: пристроїв віднімання 5.42, 5.45, 5. 49. Перед початком роботи блоки із запам'ятовуванням 5.4, 5.6 ... 5.8, 5.11, 5.14, 5.16, 5.20, 5.22, 5.32, 5.34 ... 5.38, 5.40 ... 5.53 установлюються в нульовий стан імпульсом початкової установки ПУ, що надходить з восьмого входу (входу ПУ) блока 5. Вхідні сигнали - величини pAi , Dt у вигляді j =1 двійкових паралельних кодів надходять з другого і четвертого входів блока 5 через перші входи відповідно блоків і 5.1, 5.3 на блоки запам’ятовування 5.4, 5.6. Величина p Ai запам'ятовується у блоці запам'ятовування 5.4 при надходженні першого сигналу Πρ з першого входу блока 5 на другі входи блока і 5.1. m å pAi Величина j=1 виробляється в підсумувачі 5.16 у вигляді двійкового паралельного коду. Величина t p Ai надходить на блок 5.16 з виходу блока 5.4 через перші входи блока і 5.13 при умові надходження імпульсу опитування Оп1 з п’ятого блоку 5 на блок 5.4. Величина p Ai проходить через блок 5.13 при умові надходження керуючого сигналу з виходу блока 5.19. Керуючий сигнал на виході блока 5.19 виробляється при умові: pкстр = p А 1 < p Аi £ p кстр = p А 1 + qo таким чином. Величина p Ai з виходу блока 5.4 через перші входи блока і 5.9 надходитъ на блок 5.14 і заp = pпсгр пам'ятовується у ньому як величина A 1 .Після цього величина p Ai з виходу блока 5.14 надходить на блок І 5.10, на виході якого вироб блок, І 5.9 і дозволяється проходження величини p Ai з другого входу блока 5 через перші входи блока і 5.2 на блок запам’ятовування 5.8. p = p Aі + q 0 Величина кстр виробляється у вигляді двійкового паралельного коду у підсумувачі 5.11 при надходженні на його входи величин p A1 і q 0 відповідно з виходів блоків 5.14 і 5.7. pкстр = p А 1 + q0 Величина виробляється у блоці 5.11 при надходженні імпульсу опитування Оп1 з п'ятого входу блока 5. На виходах блоків зрівняння 5.17 і 5.18 виробляються керуючі сигнали при виконанні умов: p А1 £ p А i p Аi £ p А1 + qo , при надходженні величин p Ai, p A 1 на входи блока 5.17 і величин p Ai , p А1 + q 0 на входи блока 5.18. Величина p Ai надходить на перші входи блоків зрівнення 5.17 і 5.18 з виходу блока запам'ятовування 5.4. Величини p A1 , p Аі + q0 надходять на другі входи блоків зрівнення 5.17 і 5.18 відповідно з виходів блоків 5.14 і 5.11. Керуючі сигнали з виходів блоків зрівнення 5.17 і 5.18 надходять на відповідні входи блока і 5.19. Керуючий сигнал з виходу блока і 5.19 надходить на другий вхід блока і 5.13 і рахункоий вхід лічильника 5.22. Лічильник 5.22 підраховує число імпульсів, для яких виконується умова: p A1
p А1 + q 0 . m å pAi × m Величини =j 1 надходять на входи пристрою 5.20 відповідно з виходів блоків 5.16 і 5.22. Величина p11 виробляється у блоці 5.20 при надходженні імпульсу опитування Оп1 з блока затримки 5.21 і керуючого сигналу з виходу блока зрівняння 5.21, котрий надходить через перший вхід блока АБО 5.15. Керуючий сигнал на виході блока 5.12 виробляється при виконанні умови p Ai > p А1 + q 0 . Величини p Ai , p А1 + q 0 поступають на входи блока 5.12 відповідно з виходів блоків 5.8 і 5.11. Величина p11 з виходу блока 5.20 через перші входи блока і 5.25 надходить на четвертий ви хід блока 5, а через перші входи блока i 5.25 і блок 35 46245 36 АБО 5.29 надходить на перший вихід блока 5. блока 5.41 надходять величини a11 і a22 p11 через блок і 5.25 Проходження величини відповідно з виходів блоків 5.32 і 5.33; на входи відбувається в момент надходження на другі і блока 5.43 надходить величина a12 з виходу блотреті входи блока і 5.25 відповідно керуючого сигка 5.40. налу з блока затримки 5.26 і імпульсу опитування Оп1 з блока затримки 5.24. Величини a22b1 , a12b2 , a11b2 - a12b1 , Керуючий сигнал з виходу блока зрівняння a11a22 - a12 a12 виробляється відповідно у блоках 5.12 також надходить: 5.48, 5.50, 5.44, 5.46, 5.41, 5.43 при надходженні на другі входи блока і 5.3, при цьому дозвоімпульсу опитування Оп2 з шостого входу блока 5. Dt з четвертого ляється проходження величини входу блока 5 на блок запам'ятовування 5.6, Величини a22b1 - a12b2 , a11b2 - a12b1 , через блок затримки 5.28 і блок АБО 5.23 на a11a22 - a12 a12 виробляються у вигляді двійкових нульовий вхід лічильника 5.22 і лічильник перехопаралельних кодів відповідно у пристроях дить в нульовий стан. віднімання 5.49, 5.45, 5.41. При цьому на входи Подальша робота блока 5 по визначенню веблока 5.49 надходять величини a22b1 і a12b2 , личини p11 за кожне сканування антени виковідповідно з виходів блоків 5.40 і 5.50; на входи нується ідентично описаній. блока 5.45 надходять величини a11b2 і a12b1 , Величини: a11, a12 , a22 , b1, b2 виробляються у відповідно з виходів блоків 5.44 і 5.46; на входи вигляді двійкових паралельних кодів відповідно у блоках 5.32, 5.40, 5.38, 5.34, 5. 36. блока 5.42 надходять величини a11a22 і a12 a12 При цьому на вхід блока 5.32 надходить веливідповідно з виходів блоків 5.41 і 5.43. чина n1 з виходу лічильника 5.22 через дешифраВеличини a22b1 , a12b2 , a11b2 - a12b1 , тор 5.30 і перші входи блока і 5.31; на вхід блока a11a22 - a12 a12 виробляється відповідно у блоках 5.40 надходить величина Dt з виходу блока за5.49, 5.45. 5.42 при надходженні імпульсу опитупам’ятовування 5.6 через блок і 5.30 на вхід блока ванню Оп2 з шостого входу блока 5. 2 5.33 надходить величина (D tj ) з виходу перемноdp1 p 01 , dt , p1 виробляються жувача 5.37. на вхід якого поступає величина Dtj з Величини виходу блока і 5.39; на вхід блока 5.34 надходить відповідно у ділильних пристроях 5.53, 5.47 і підсумувачеві 5.51. При цьому на входи блока 5.53 p11j з виходу ділильного пристрою 5.20; величина через перші входи блока і 5.33; на вхід блока 5.36 надходять величини a22b1 - a12b2 і a11a22 надходить величина p11 jD tj з виходу перемножувала 5.35, на входи якого поступають відповідно величина p11j з виходу блока і 5.33 і величина Dtj з виходу блока і 5.39. a12 , a22, b1, b2 Величини виробляються відповідно у блоках 5.40, 5.38. 5.34, 5.36 при надходженні імпульсу опитування Оп2 з шостого входу блока 5. Величини n1 , Dtj , p11j проходять відповідно через блоки і 5.31, 5.39, 5.33 в момент надходження на їх другі входи сигналу РЕВЕРС з третього входу олока і 5.31. Величини a22b1 , a12b2 , a11b2 , a12b1 , a11a22 , a12 a12 виробляються у вигляді двійкових паралельних кодів відповідно в перемножувачах 5.43, 5.50, 5.44, 5.46, 5.41, 5.43. При цьому на входи блока 5.48 надходять величини b1 і a22 відповідно з виходів блоків 5.34 і 5.33; на входи блока 5.50 надходять величини b2 і a12 відповідно з виходів блоків 5.36 і 5.40; на входи блока 5.44 надходять величини b2 і a11 відповідно з виходів блоків 5.36 і 5.32; на входи блока 5.46 надходять величини b1 і a12 відповідно з виходів блоків 5.34 і 5.40; на входи a12 a12 відповідно з виходів блоків 5.49 і 5.42; на входи блока 5.47 надходять величини a11b2 a12b1 і a11a22 - a12 a12 відповідно з виходів блоків 5.45 і 5.42; на входи блока 5.51 надходять величиdp 1 p 01 , dt D t відповідно з ни виходів блоків 5.53 і перемножувача 5.52, на входи dp1 якого надходять величини dt і Dt з виходів блоків 5.47 і 539. dp1 Величини p 01 , dt , Dt виробляються відповідно у блоках 5.53, 5.47, 5.51 при надходженні імпульсу опитування Оп2 з шостого входу блока 5. Величини p1 , p 01 , n1 у вигляді двійкових паралельних кодів надходять з блоків 5.51. 5.53 і 5.32 відповідно через перші входи блоків і 5.54, який з’єднується з блоком АБО 5.29, 5.56 і 5.55 на перший, третій і другий ви ходи блока 5. Величини p1 , p 01 , n1 проходять через блоки і 5.54, 5.55 і 5.56 в момент надходження на їх другі і треті входи відповідно імпульсу опитування Оп3 з сьомого входу блока 5 і сигналу РЕВЕРС з блока затримки 5.57. 37 46245 38 Блоки s 5.1 ... 5.3, 5.9, 5.10, 5.13, 5.19, 5.25, координат 25, з шостим входом пристрою 5.31, 5.33, 5.39, 5.54 ... 5.56; блоки завимірювання курсу 26, з третім входом пристрою пам'ятовування 5.4, 5.6 ...5.8, 5.14; дешифратори вимірювання швидкості 27, з виходом другого бло5.5, 5.30; підсумувачі 5.11, 5.16, 5.34, 5.36, 5.38, ка аналізу 21, вихід першого блока аналізу 20 спо5.40. 5.51; блоки зрівняння 5.12, 5.17, 5.18; блоки лучений з першим входом лічильника часу 22 та АБО 5.15, 5.23, 5.27, 5.29: ділильні пристрої 5.20, четвертим входом другого блока аналізу 21, п'ятий 5.47, 5.53; блоки затримки 5.21. 5,24, 5.26, 5.28, вхід якого увімкнений до виходу лічильника часу 5.57; лічильники 5.22, 5.32; перемножувачі 5,35, та першого входу пристрою вимірювання курсу 26. 5.37, 5.41, 5.43, 5.44, 5.46, 5.48, 5.50. 5.52; приВиходи блоків i3 , 17, i4 , 18 відповідно через четстрої віднімання 5.42, 5.45, 5.29 є типовими привертий та п'ятий блоки запам'ятовування 13, 14 строями цифрової техніки (Ричардс Р.К. "Элеменувімкнені до першого і другого входів др угого петы и схемы цифровых вычислительных машин”. ретворювача полярних координат у прямокутні 24. Изд-во ИЛ, М., 1961. Букреев И.Н., Мансуров В.Μ., Горячев В.И. ''Микроэлектронные схемы цифроВиходи блоків i1 , 15, i2 , 16 відповідно через вых устройств. Изд-во "Сов. Радио", М.,1975). другий та третій блоки запам'ятовування 11, 12 На ведучому приймальному пункті І (див. Фіг. сполучені з першим та другим входами першого 2): перший вхід антени 1 через привід антени 2 перетворювача полярних координат у прямокутні сполучений з першим виходом давача сканування 23. Перший другий, третій, четвертий входи, перантени 3, перший вихід антени 1 через приймач 4 ший та другий виходи обчислювача прирощення увімкнутий до першого входу блока визначення прямокутних координат 25 увімкнені відповідно до кутови х координат 5, другий вихід антени 1 першого та другого ви ходів першого та другого увімкнутий до першого входу давача сканування перетворювачів полярних координат у прямокутні антени 3 і до другого входу блока визначення ку23, 24, другого та третього входів пристрою тових координат 5, третій вхід, перший та четвервимірювання курсу 26 . Четвертий та п'ятий входи, тий виходи якого увімкнені відповідно до другого перший, другий та, третій ви ходи пристрою виходу давача сканування антени 3, до першого вимірювання курсу 26 увімкнені відповідно до вивходу блока обчислення відстані 6 та третього ходів давачів к урсу 8 та швидкості 7, до четвертого входу давача сканування антени 3. Перший, друвходу пристрою індикації 9, до першого та другого гий, третій, четвертий, п'ятий і шостий входи, первходів пристрою вимірювання швидкості 27, вихід ший, другий, третій, четвертий, п'ятий виходи блоякого увімкнений до п'ятого входу пристрою ка ключів 28 увімкнені відповідно до першого і індикації 9. другого ви ходів, першого входу першого блока Перший, другий, третій, четвертий, п'ятий, обчислення відстані 6, котрі також відповідно спошостий, сьомий, восьмий входи 39, 40, 41, 42, 43, лучені з першими входами другого та першого 44,45, 46, перший, другий, третій, четвертий та i3 17, вхід першого п'ятий виходи 47, 48, 49, 50, 51 ведучого ПП споблоків аналізу 21 і 20, блока лучені відповідно з другим входом антени 1, з вхоблока аналізу 20 сполучений також з першим входом давача курсу 8, з входом давача швидкості 7, другим, третім, четвертим і п'ятим входами першодом блока i4 18 та з другим входом другого блока аналізу 21, до другого ви ходу блока визначення го блока обчислення відстані 6, першим входом кутови х координат 5, до першого і другого виходів, першого блока залам'ятовуванння 10, третім видо першого і другого входів блока обчислення походом давача сканування антени 3, першим та точних координат 29, до першого, другого та другим входами пристрою індикації 9, першими третього входів пристрою індикації 9. Четвертий і виходами пристрою вимірювання курсу 26 та прип'ятий входи пристрою індикації 9 підключені строю вимірювання швидкості 27. відповідно до третього та четвертого входів блока Перший вихід (ви хід початкової установки ПУ) обчислення поточних координат 29, п'ятий та шос56 формувача керуючих сигналів 30 ведучого ПП І тий входи якого сполучені відповідно з виходами сполучений з нульовими входами пристроїв з задавачів швидкості 7 і курсу 8. пам'ятовуванням: блоками 3, 5, 6, 9, 10, 11, 12, 13, Вихід першого блока запам'ятовування 10 14, 19, 20, 21, 22, 23, 24, 25, 26, 27, 29. Ви ходи 57 сполучений з першим входом другого блока об77 формувача керуючих сигналів 30 з'єднані з числення відстані 19, другий, третій, четвертий, відповідними входами блоків 3, 5, 6, 9, 10, 11, 12, п'ятий входи та перший вихід якого увімкнені 13, 14, 19, 20, 21, 22, 23, 24, 25, 26, 27, 28, 29. Ці відповідно до третього виходу блока визначення зв'язки на фіг. 2 не показані, щоб не затіняти кутови х координат 5, третій вихід якого сполучефукціональні зв'язки. При цьому другий, третій, четвертий, п'ятий і i1 15, до третьний також з першим входом блока шостий ви ходи блока 30 з'єднані відповідно з четого, четвертого та п'ятого входів першого блока вертим входом блока 5, третім входом блока 1, обчислення відстані б, четвертий вхід якого сполуп'ятим входом блока 5, третім входом блока 3 і чений також з третім входом другого блока аналізу шостим входом блока 5. Сьомий вихід блока 30 з'єднаний з сьомим входом блока 5 та шостими 21, до першого входу блока i2 16. входами блоків 6 і 19. Восьмий вихід блока 30 Другий вхід блока 16 сполучений з другими з'єднаний з сьомими входами блоків 6 і 19. входами блоків i1 , 15, i3 , 17, i4 , 18, з третіми Дев'ятий вихід блока 30 з'єднаний з восьмими входами першого та друго го перетворювачів повходами блоків 6 і 19. Десятий вихід блока 30 лярних координат у прямокутні 23, 24, з п'ятим з'єднаний з другими входами блоків 11, 12, 13, 14. входом обчислювача прирощення прямокутних Одинадцятий вихід блока 30 з'єднаний з четвер 39 46245 40 тими входами блоків 23, 24. Дванадцятий вихід знака, Δ, який поступає на привід антени 2. У моблока 30 з'єднаний з п'ятими входами блоків 23 і мент, коли діаграма спрямованості антени 1 почи24. Тринадцятий і чотирнадцятий виходи блока 30 нає проходити напрямок на ВО, перший сигнал з'єднані відповідно з шостим і сьомим входами (імпульс) від ВО з першого виходу антени 1 постублока 25. П'ятнадцятий вихід блока 30 з'єднаний з пає на приймач 4, де підсилюється. Якщо подругими входами блоків 7 і 8. Шістнадцятий, тужність підсиленого сигналу перевищує заданий сімнадцятий, вісімнадцятий, дев'ятнадцятий, пороговий рівень, то на виході приймача 4 фордвадцятий, двадцять перший, двадцять другий мується імпульс стандартної амплітуди При який виходи блока 30 з'єднані відповідно з шостим вхопоступає на перший вхід блока визначення кутодом блока 26, сьомим входом блока 26, четвертим вих координат 5. При надходженні імпульсу Пр3 входом блока 27, п'ятим входом блока 27, сьомим, виходу приймача 4 в блок 5 в останньому форвосьмим та дев'ятим входами блока 29. мується сигнал дозволу на запам'ятовування коду На веденому ПП ІІ (див. фіг. 3): перший вхід антени 31 через привід антени 32 увімкнений до кутового положення p A1 , який поступає з другого першого виходу давача сканування антени 33, виходу антени 1 на другий вхід блока визначення перший вихід антени 31 через приймач 34 кутови х координат 5, а також на формування підключений до першого входу блока визначення стробу, в межах якого виконується оброблення кутови х координат 35, другий вихід антени 31 імпульсів, прийнятих від ВО, При цьому значення підключений до першого входу давача сканування p = p А1 початку стробу дорівнює пстр , кінця стробу антени 33 та другого входу блока визначення кутових координат 35, третій вхід, четвертий, перpкстр = p А 1 + q0 q 0 ширина ДС антени. , де ший та другий ви ходи якого увімкнені відповідно до другого виходу та другого входу давача скануВидача коду куто вого положення антени p Ai з вання антени 33, до першого та другого входів другого ви ходу антени 1 виконується при надходпристрою індикації 37, третій вхід якого увімкнений жені імпульсу опитування з третього 58 виходу до третього входу давача сканування антени 33 та формувача 30 на третій вхід антени 1. У блоці 5 виходу блока запам'ятовування 36. Перший, друзапам'ятовується поточне значення коду антени гий входи 52,53, перший і другий виходи 54, 55 для кожного імпульсу, сформованого на виході веденого приймального пункту увімкнені приймача 4. відповідно до входу блока запам'ятовування 36, Число імпульсів, сформованих на виході придругого виходу антени 31, другого та третього виймача 4 за інтервал часу, коли ДС антени 1 проходів блока визначення кутових координат 35. ходить напрямок на ВО, залежить від співвідноПерший вихід 78 формувача керуючих сигшення кутови х швидкостей обертання антени ВО і налів 38 веденого ПП II сполучений з нульовими антени 1, від ширини ДО цих антен і від часто ти входами пристроїв з запам'ятовуванням: блоками повторювання випромінюваних сигналів F. 33, 35, 36, 37. Виходи 79 – 66 формувача керуючих В блоці визначення кутових координат 5 висигналів 38 з'єднані з відповідними входами блоків значається кутовий напрямок (пеленг) з ведучого 33, 35, 36, 37. Ці зв'язки на фіг. З не показані, щоб ПП І на ВО 5/д/ за один прохід ДО антени 1 нане затіняти функціональні зв'язки. прямку на ВО методом аналіза обвідної ДО антени При цьому другий, третій, четвертий, п'я тий, по формулі : шостий, сьомий, восьмий, дев'ятий виходи блока m 38 з'єднані відповідно з четвертим входом блока å pAi 35, третім входом блока 36, п'ятим входом блока j=1 p11 = 33, третім входом блока 31, другим входом блока m , 36, п'ятим входом блока 35, шостим входом блока де m - число імпульсів у стробі. 35, сьомим входом блока 35. Пристрій для визначення координат рухомого Сигнал дозволу на обчислення величини p11 випромінюючого об'єкта працює таким чином: формується в блоці 5 по сигналу, що виробНа ведучому приймальному пункті І після вмиляється при виконанні умови: кання формувач керуючих сигналів 30 видає на p Ali > pкстр = p А1 + q o . перший вихід сигнал початкової установки, який По цьому сигналу запам'ятовується також код установлює пристрої з запам'ятовуванням - блоки поточного часу ti, що надходить з другого 3, 5, 6, 9, 10, 11, 12, 13, 14, 19, 20, 21, 22, 23, 24, 57виходу формувача 30 на четвертий вхід блока 5. 25, 26, 27, 29 в початковий стан. Антеною 1, що виконує обертовий рух або Обчислене значення p11 запам'ятовується в сканування у заданому секторі, проводиться пошук блоці запам'ятовування пристрою 5. сигналів ВО і фіксується кутовий напрямок, з якого надходять сигнали. Рух антени 1 в горизонтальній Код p11 з першого виходу пристрою 5 надхоплощині виконується за допомогою привода антедить через третій вхід та третій вихід блока ключів ни 2, керуючі сигнали на який надходить з давача 28 на перший вхід блока індикації 9. Код p11 з четсканування антени 3. вертого виходу пристрою 5 надходить на другий Якщо місцезнаходження ВО перед початком роботи невідоме, то антені 1 ПП І спочатку завихід пристрою 3. Видача коду p11 з пристрою 5 дається режим кругового обертання. Режим обервиконується по сигналу опитування, що надходить тання антени 1 задається давачем сканування з четвертого 59 ви ходу Формувача 30 на п'ятий антени 3, при цьому формується сигнал одного вхід пристрою 5 . 41 46245 42 антени 1, що надходить з другого ви ходу давача p11 на пристрої Після відображення значення сканування антени 3 на третій вхід блока 5. індикації 9 антена 1 переключається із режиму Обчислення коефіцієнтів системи нормальних кругового обертання в режим сканування в секторі, _ середина якого співпадає зі значенням p11 У цьорівнянь, її рішення та обчислення p1 по формулі му випадку керуючі сигнали з першого виходу давача сканування антени 3, які надходять на вхід привода антени 2, змінюють свій знак на протилежний на краях сектора сканування. У відповідності з чим напрямок руху антени 1 в горизонтальній площині змінюється, тому що антена 1 електромеханічним зв'язком сполучена з приводом антени 2. Після переключення давача сканування антени 3 в режим сканування в секторі в останньому запам'ятовується код p11 . По сигналу опитування, (3) виконуються по сигналу опитування, що надходить з шостого 61 ви ходу формувача 30 на шостий вхід пристрою 5. поступає на вихід 47 ведучого ПП І для передачі на ведений ПП II. Оброблення імпульсів, що поступають із виходу приймача 4, виконується в пристрої 5 на кожному проході напрямку на ВО при прийомі сигналів ВО і виконанні умови: pпстр £ p Аi £ pкстр . аналогічно описаному вище при круговому обертанні антени 1. Для підвищення точності визначення кутового напрямку (пеленга) на ВО в пристрої 5 обчис Обчислені величини p1 , n1 , p 01 у вигляді двійкових кодів поступають відповідно на перший, другий та третій ви ходи блока 5 при надходженні імпульсів опитування з сьомого виходу 62 формувача керуючих сигналів 30 на сьомий вхід блока 5. При цьому забороняється проходження імпульсу опитування з п'ятого входу блока 5. що надходить з п'ятого 60 формувача 30 на третій вхід блока 3, код p11 з третього виходу блока 3 _ люється згладжене значення пеленга p 1 за n сканувань антени 1. Згладжування виконується методом найменших квадратів, виходячи із гіпотези лінійної і рівномірної зміни пеленга на інтервалі згладжування. _ Згладжене значення люється по формулі: p1 = p 01 + пеленга p1 обчис dp 1 t dt , n1 n1 dp1 n 1 å t j = å p1j dt j=1 j =1 dp p01 å t j + 1 dt j =1 n1 Величини , p 01 , n1 у вигляді двійкових кодів запам'ятовуються у блоках запам'ятовування блока 5. _ , p 01 обчислюються при зміні числового значення величини n1 і запам'ятовуються в блоках запам'ятовування блока визначення кутового напрямку 5. Нові значення величин p1 _ _ p1 Величини , n1 з виходів блока 5 у вигляді війкових кодів через блок ключів 28 поступають відповідно на перший та третій входи пристрою індикації 9 для відображення цих величин. Вели_ чина p1 у вигляді двійкового коду також поступає на перші входи першого блока обчислення відстані 6 та блока із 17. Величина p 01 у вигляді двійкового коду поступає на др угий вхід другого блока обчислення відстані 19 та перший вхід і1 15. У першому блоці обчислення відстані б обчис_ R1(t ) dp1 в якій величини p 01 , dt визначаються із системи нормальних рівнянь: p0i × n1 + _ p1 люється відстань від ведучого ПП І до ВО на момент часу tj, коли закінчено визначення кутового напрямку (пеленгу) на BO за n сканувань антени 1. У другому блоці обчислення відстані 19 обчислюється відстань R01 від ведучого ПП І до ВО на момент часу t = t0 за n сканувань антени 1. _ , n1 å t 2 = å p1jtj j j=1 де: , p1j - пеленг з ведучого ПП І на ВО, що вироблений в момент часу tj, tj- момент вимірювання пеленга, n1 - число вимірювань пеленга, по яким проводиться згладжування. Обчислення величини n1 виконується при прийомі сигналів ВО і наявності сигналу реверсу Обчислення величин R01 , R1(t ) виконується по формулах (теорема синусів): Б12 sin(p02 - a 21) R01 = sin[(p 02 - a 21 ) + (a12 - p01 )] , _____ R1( t ) = Б12 sin(p 2 - a 21 ) - ù é sinê( p2 - a 21) + (a12 - p1 )ú ê ú , ë û де Б12 - величина бази між ведучим та веденим ПП, a 12 , a 21 кутові напрямки відповідно з ведучого ПП на ведений і з веденого на ведучий, відраховані від напрямку на північ. 43 46245 44 блока 20 і формується сигнал дозволу на перехід у p1 режим вимірювання параметрів руху ВО. , p2 - кутові напрямки на ВО відповідно з _ ведучого ПП І і з веденого ПП II, відраховані від напрямку на північ. Якщо R1(t ) £ A 0 , де A0 константа, що виби_ _ рається із допустимих умов роботи пристрою, то формується сигнал, який дозволяє перехід у реВеличини p1 , p2 , a 12 , Б12 , a 21 у вигляді жим вимірювання параметрів руху ВО. двійкових кодів поступають на перший, другий, Цей сигнал з виходу першого блока аналізу 20 третій, четвертий та п'ятий входи першого блока у вигляді послідовності імпульсів (ТАКТИ) постуобчислення відстані б відповідно з першого виходу пає на вхід лічильника часу 22 і на четвертий вхід блока визначення кутового напрямку 5, входів 42, другого блока аналізу 21. Після цього блок аналізу 43, 44, 45 ведучого ПП. 21 переходить у режим вимірювання параметрів Величини p 01 , p02 , a 12 , Б12 , a 21 у вигляді руху ВО. двійкових кодів поступають на другий, перший, _ R1(t ) третій, четвертий та п'ятий входи другого блока У другому блоці аналізу 21 по сигналах , обчислення відстані 19 відповідно з блока визнаn3 , Б12 і часу t, що надходять на другий, перший, чення кутових координат 5, першого блока запам'ятовування 10, входів 43, 44, 45 ведучо го ПП. третій, п'ятий входи відповідно з другого та першо_ _ го виходів блока 6, з 44 входу ведучого ПП, з виходу лічильника часу 22, визначається необхідний Величини p1 , p2 , a 12 , Б12 , a 21 запам'я для вимірювання параметрів руху ВО інтервал товуються в блоках запам'ятовування блока 6, часу t = t0 . 3 моменту часу t = t0 у другому блоці величини p 01 , p02 , a 12 , Б12 , a 21 запам'ятоаналізу 21 починають вироблятися імпульсні кевуються в блоках запам'ятовування блока 19 при руючі сигнали, початок яких співпадає з моментом надходженні імпульсів опитування із сьомого 62 виходу формувача керуючих сигналів 30 на шості зміни числового значення величиниn3 . входи блоків 6 і 19. Керуючі сигнали (СТРОБ) з першого виходу _ блока 21 поступають на другі входи блоків і 1 15, і2. Обчислення відстаней R1(t ) та R01 в блоках 6 16, іЗ 17, і4 18 і треті входи перетворювачів 23, 24, і 19 виконується при надходженні імпульсів опитуна п'ятий вхід обчислювача прирощення прямокування з восьмого виходу 63 формувача керуючих тних координат 25, на шостий вхід пристрою вимісигналів 30 на сьомі входи блоків 6 і 19. рювання курсу 26, на третій вхід пристрою вимі_ рювання швидкості 27. У момент видачі керуючих _ _ Обчислені величини R1(t ) та R01 заp1 R1(t ) пам'ятовуються в блоках запам'ятовування блоків сигналів величини , , p 01 , R01 через 6 та 19. У блоці 6 також виконується підрахунок перші входи блоків і З 17, і4 18, і1 15, і2. 16 поступа_ ють відповідно на входи блоків запам'ятовування 13, 14, 11, 12 і запам'ятовуються в них. числа вимірювань відстані R1(t ) - n3 . Величина При надходженні сигналів опитування з десяn3 запам'ятовується в блоці запам'ятовування того 65 виходу формувача керуючих сигналів 30 блока 6. на другі входи блоків запам'ятовування 13, 14, 11, _ _ _ Видача величин R1(t ) , n3 у вигляді двійкових кодів на другий та перший виходи блока 6 виконується при надходженні імпульсів опитування з дев’ятого 64 виходу формувача керуючих сигналів 30 на восьмий вхід блока 6. Видача величини R01 на перший вихід блока 19 виконується при надходженні імпульсу опитування з дев'ятого 64 виходу формувача керуючих сигналів 30 на восьмий вхід блока 19. _ Величини R1(t ) , n3 з другого та першого виходів блока 6 через блок ключів 28 і блок обчислення поточних координат 29 поступають відповідно на другий та третій входи пристрою індикації 9. _ Величина R1(t ) поступає також на перший вхід першого блока аналізу 20. Після установки блока 20 у режим вимірювання параметрів руху ВО ви_ конується запам'ятовування величини R1(t ) у вигляді двійкового коду в блоці запам'ятовування _ _ 12 величини p1 , R1(t ) у вигляді двійкових кодів поступають відповідно на перший та другий входи другого перетворювача полярних координат у прямокутні 24, а величини p 01 , R01 у вигляді двійкових кодів поступають відповідно на перший та другий входи першого перетворювача полярних координат у прямокутні 23. Запам'ятовування ве_ _ личин p1 , R1(t ) y блоці 24 і величин p 01 , R01 у блоці 23 виконується після надходження керуючого сигналу з виходу др угого блока аналізу 21 на треті входи блоків 23, 24. У блоках 23, 24 виконується перетворення по_ _ лярних координат (величин p 01 , R01 , p1 , R1(t ) ) у прямокутні по формулах: x01 = R01 sinp 01 , у01 = R01 cos p 01 , _____ ____ __ x1( t ) = R1(t ) sin p1 , 45 _____ ____ 46245 46 __ t у1( t ) = R1( t ) cos p1 . Перетворення полярних координат у прямокутні виконується після надходження імпульса опитування з одинадцятого виходу 66 формувача 30 на четверті входи блоків 23, 24. _ Обчислені значення величин x01 , у01 , х1( t ) , D x - ò Vк sinКк dt Кц = arctg Dу - ò Vк cos Кк dt запам'ятовуються відповідно в блоках 23 і 24. При надходжені сигналів опитування з дванадцятого 67 виходу формувача керуючих сигналів 30 на п'яті входи блоків 23, 24 величини x01 , у01 у вигляді двійкових кодів з першого та другого виходів блока 23 поступають відповідно на перший та другий входи обчислювача прирощення прямо_ _ кутних координат 25, а величини х1( t ) , у1( t ) у вигляді двійкових кодів з першого та другого ви ходів блока 24 поступають відповідно на третій, та четвертий входи обчислювача прирощення прямокутних координат 25. _ Запам'ятовування величин x01 , у01 , х1( t ) , _ у1( t ) в блоці 25 виконується після надходження керуючих сигналів з виходу другого блока аналізу на п'ятий вхід блока 25. Обчислення величин: Dx = x1( t ) - x01 , Dу = у1( t ) - у01 . з урахуванням їх знаків виконується в блоці 25 після надходження імпульсу опитування з тринадцятого 69 виходу формувача керуючих сигналів 30 на шостий вхід блока 25. При надходженні імпульсу опитування з чотирнадцятого69виходу формувача керуючи х сигналів 30 на сьомий вхід блока 25 величини Dx , Dу у вигляді двійкових кодів поступають відповідно на другий та третій входи пристрою вимірювання курсу 26. Величини Кк , Vк у вигляді двійкових кодів поступають з давача курсу 8 та давача швидкості 7 на четвертий та п'ятий входи пристрою вимірювання курсу 26 при надходженні імпульсів опитування з п'ятнадцятого 70 виходу формувача керуючих сигналів 30 на другі входи давача курсу 8 та давача швидкості 7. Величина t у вигляді двійкового коду поступає з лічильника часу 22 на перший вхід пристрою 26. Запам'ятовування величин Кк , Vк , Dx , Dу у пристрої 26 виконується після надходження керуючи х сигналів з виходу блока аналізу 21 на шостий вхід пристрою 26. У пристрої 26 виконуються обчислення: - курсу ВО згідно з формулою Dx - Vк sinК к × t D у - Vк cos Кк × t , - складових швидкості ВО згідно з формулами t _ у1( t ) = arctg t Dx - ò Vк sinКк dt Vцx = = t Dx - Vк sinКк × t t , t Dx - ò Vк cos Кк dt Dx - Vк cos Кк × t t . Кц Vцх Vцу Обчислення величин , , виконується при надходженні імпульсів опитування з шістнадцятого виходу 71 формувача керуючих сигналів 30 на сьомий вхід пристрою вимірювання К V курсу 26. Обчислені значення величин ц , цх , Vцу запам'ятовуються в блоках запам'ятовування пристрою вимірювання курсу 26. При надходженні імпульсів опитування з сімнадцятого 72 виходу формувача керуючих сигналів 30 на восьмий вхід пристрою вимірювання курК V V су 26 величини ц , цх , цу у вигляді двійкових кодів поступають відповідно на перший, другий та третій виходи пристрою 26. К Величина ц поступає на п'ятий вхід пристрою індикації 9, четвертий вхід блока обчислення поточних координат 29 і вихід 51 ведучого ПП V V Величини цх , цу з першого та другого ви ходів пристрою 26 поступають на перший та другий входи пристрою вимірювання швидкості 27. При надходженні керуючих сигналів з виходу друго го блока аналізу 21 на третій вхід пристрою 27 величини Vцх Vцу , запам'ятовуються в блоках запам'ятовування пристрою 27. Швидкість ВО в блоці 27 обчислюється по формулі: Vцу = Vц = = t 2 2 Vцх + Vцх . V Обчислення величини ц виконується після надходження імпульсів опитування з вісімнадцятого 73 виходу формувача керуючих сигналів 30 на четвертий вхід пристрою 27. ОбV числене значення, величини у запам'ятовуються в блоці запам'ятовування пристрою 27. При надходженні імпульсів опитування з дев'ятнадцятого виходу 74 формувача керуючих сигналів 30 на п'ятий вхід пристрою 27 величина Vц у вигляді двійкового коду поступає на перший V вихід пристрою 27. Величина ц з першого виходу пристрою 27 поступає на четвертий вхід пристрою індикації 9, третій вхід блока обчислення поточних координат 29 і вихід 50 ведучого ПП. 47 46245 48 В блоці обчислення поточних координат 29 виючих сигналів 38 на другий вхід блока конується обчислення координат ВО згідно з форзапам'ятовування 36. мулами: При надходженні імпульсу опитування з третього 80 виходу формувача керуючих сигналів х(t ) = x 0 + Vк sinК к × Dt + Vц sin Кц × Dt , 38 на третій вхід блока запам'ятовування 36 велиу(t ) = у 0 + Vк cos К к × Dt + Vц cos К ц × Dt , чина p11 у вигляді двійкового коду поступає на R( t ) = [x(t )]2 +[ у(t )] вихід блока 36. 2 p11 Величина з ви ходу блока запам’ятовування 36 поступає на треті входи пристрою індикації 37 і давача сканування антени 33. Величина, p11 запам'ятовується в блоці запа , x( t ) p(t ) = arctg у( t ) , де: xo = Ro sinp o , м'ятовування блока 33 при надходженні імпульсу опитування з четвертого виходу 81 формувача керуючих сигналів 38 на п'ятий вхід давача сканування антени 33. Після нього давач сканування антени 33 переключається в режим сканування в секторі, середина якого дорівнює p11 . Далі робота уo = Ro cos p o , ____ R o = R 1( t ) , __ po = p1 , Dt - інтервал часу. на веденому ПП II по скануванню антени 31 та визначенню кутових напрямків з веденого ПП на ____ __ R 0 = R 1( t ) p0 = p1 Величини , у вигляді двійкових кодів поступають через блок ключів 28 на перший і другий входи блока 29 з другого виходу блока 6 і першого виходу блока 5. Величини Vк , Кк у вигляді двійкових кодів поступають з виходів давачів 7 і 5 на п'ятий та V К шостий входи блока 29, величини ц , ц у вигляді двійкових кодів поступають на третій та четвертий входи пристрою 29 і запам'ятовуються там. Дозволом для цього є надходження керуючого сигналу з двадцятого 75 виходу формувача керуючи х сигналів 30 на сьомий вхід пристрою 29. Обчислення формульних залежностей починається після приходу імпульсу дозволу з двадцять першого 75 виходу формувача керуючих сигналів 30 на восьмий вхід пристрою 29. Обчислені ____ __ значення R 0 = R 1( t ) , p0 = p1 запам'ятовуються в блоках запам'ятовування блока 29. При надходженні імпульсів опитування з двадцять 77 другого ви ходу формувача керуючих сигналів 30 на дев'ятий вхід пристрою 29 величини ____ R 0 = R 1( t ) __ , p0 = p1 у вигляді двійкових кодів поступають на перший і другий виходи блока 29, через блок ключів 28 на другий і перший входи пристрою індикації 9 та на виходи 49 і 48 ведучого ПП І. На веденому ПП І(див. Фіг. 3) після включення формувач 38 видає на перший вихід 78 сигнал початкової установки, який установлює блоки із запам'ятовуванням 33, 35, 36, 37 у початковий стан. Куто ве положення середини сектора сканування антени 31 установлюється таким чином : Значення величини p11 що передане з ведучого ПП І з входу 52 веденого ПП II поступає на перший вхід блока запам'ятовування 36 і запам'я товується в цьому блоці при надходженн керуючого імпульсу з шостого 83 виходу формувача керу __ BO (p 2 , p02 ) виконується ідентично роботі на ведучому ПП. Рух антени 31 в горизонтальній площині виконується за допомогою привода антени 32, керуючі сигнали на який надходять з давача сканування антени 33. В момент часу, коли діаграма спрямованості антени 31 починає перетинати напрямок на ВО, перший сигнал (імпульс) від ВО з виходу антени 31 поступає на приймач 34 і підсилюється там. Якщо потужність вхідного сигналу (імпульсу) приймача 34 перевищує заданий пороговий рівень, то на виході приймача формується імпульс стандартної амплітуди, який поступає на перший вхід блока визначення кутових координат 35. У блоці 35 при надходженні імпульсу з ви ходу приймача виробляється сигнал дозволу на запам'ятовування коду кутового положення антени 31 p A2 і формування стробу , усередині якого виконується обробка імпульсів, прийнятих від ВО. Видача коду кутового положення антени з другого виходу антени 31 виконується при надходженні імпульсу опитування з п'ятого 82 виходу формувача керуючих сигналів 38 на третій вхід антени 31. В блоці 35 запам'ятовується код положення антени 31 по кожному сформованому імпульсу на ви ході приймача 34. У пристрої 35, ідентично з пристроєм 5 на ведучому ПП, визначається кутовий напрямок з веденого ПП на ВО на кожному проході антени напрямку на ВО (при умові приймання сигналів ВО). Сигнал дозволу на визначення кутового напрямку p22 формується в блоці 35 по сигналу, що виробляється в блоці 35, при виконанні умови: p А2 і > pкстр = p А 2 + q о . По цьому сигналу також запам'ятовується код часу tj, який поступає з другого 79 виходу формувача керуючих си гналів 38 на четвертий вхід блока 35. Обчислене значення p22 запам'ятовується в блоці запам'ятовування блока 35. 49 46245 50 параметрів руху випромінюючого об'єкту, що p22 з другого виходу блока 35 поступає Код обумовлює підвищення точності визначення потона другий вхід пристрою індикації 37, Видача коду чних упереджених координат рухомого об'єкта при p22 із блока 35 виконується при надходженні імзастаріванні даних після закінчення вимірювання пульсу опитування з сьомого 84 виходу формувача керуючих сигналів 38 на п'ятий вхід блока 35. У блоці 35 обчислюються згладжені значення кутови х напрямків (пеленгів) на ВО. Обчислення __ величин , p02 і числа n2 обзорів антени, на яких прийняті сигнали від ВО, ідентично обчисp2 __ ленню величин p1 , p 01 , n1 у блоці 5 ведучо го __ ПП. Обчислення величин p2 , p02 , n2 у блоці 35 виконуються при надходженні імпульсу опитування з восьмого 85 виходу формувача керуючих сигналів 38 на шостий вхід блока 35. Обчислені вели__ чини , p02 , n2 у вигляді двійкових кодів запам'ятовуються в блоках запам'ятовування блока 35. Обчислення величини n2 виконується по сигp2 налу реверса антени 31, що надходить з другого виходу давача сканування антени 33 на третій вхід __ блока 35. Нові значення величин p2 , p02 обчислюються при зміні числового значення величини n2 і запам'ятовуються в блоках запам'ятовування блока 35. __ Обчислені величини n2 , p2 , p02 у вигляді двійкових кодів поступають відповідно на перший, другий та третій ви ходи блока 35 при надходженні імпульсу опитування з дев'ятого 86 виходу формувача керуючих сигналів 38 на сьомий вхід блока 35. При цьому забороняється проходження імпульсу опитування з сьомого входу блока 35. __ Величини n2 , p2 у вигляді двійкових кодів поступають відповідно на перший та другий входи __ пристрою індикації 37, величина p2 поступає також на вихід 54 веденого ПП. Величина p02 у вигляді двійкового коду поступає на вихід 55 веденого ПП. Пристрій, що заявляється мас технічні переваги над прототипом, а саме пристрій забезпечує визначення: факту переміщення (руху) випромінюючого об'єкту; координат рухомого випромінюючого об'єкту x0 , у0 на момент часу t = t . Поточні упереджені ко0 ординати рухомого об'єкту, на момент часу t > t0 визначаються згідно формул: t1 t1 t0 t0 ху n(t ) = xo + ò Vk sinК кdt + ò Vц sin Кц dt t1 t0 , t1 t0 у у n(t ) = уo + ò Vk cos Кк dt + ò Vц cos Кц dt , Пристрій, що заявляється, забезпечує визначення упередженнях координат рухомого об'єкту X у п( t ) Y ( t) , уп з меншими похибками у порівнянні з прототипом за рахунок вимірювання складових: t1 t1 ò Vц sinКц dt ò Vц cos Кц dt t0 , t0 . Числове значення величин t1 t1 ò Vц sinКц dt ò Vц cos Кц dt t0 , t0 . V залежить, від швидкості руху об'єкта ц , часу вимірювання tB, за який визначаються величини Vц К , ц часу застарівання даних tзас = t i - t 0 .Так dVцх = dVцу = 30 % Vцх при VЦ = 2км/хв, tЗАС = 7хв, x (t ) у (t ) похибки вимірювання величин у п , уп зменьшують на 9,8 км. У НДІ "КВАНТ" розроблені елементи макета пристрою для визначення координат рухомого об'єкту, який реалізує окремі технічні рішення пристрою, що пропонується. Розроблені програми відпрацювання макету, що реалізує структур у запропонованого пристрою. Технічна документація на винахід, що заявляється, виконана на рівні ескізних креслень, які дозволяють відтворити запропонований "Пристрій" для визначення координат рухомого випромінюючого об'є05213,3,кту. 51 46245 52 53 46245 54 55 46245 56 57 46245 58 59 46245 60
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for determining coordinates of a moving object with a radiation source
Автори англійськоюOstapov Anatolii Oleksandrovych, Steriopolo Yevhen Anatoliiovych, Titov Valerii Serhiiovych, Chyhyryn Oleh Trokhymovych
Назва патенту російськоюУстройство для определения координат подвижного излучающего объекта
Автори російськоюОстапов Анатолий Александрович, Стериополо Евгений Анатольевич, ТИтов ВалерИй Сергеевич, Чигирин Олег Трофимович
МПК / Мітки
Мітки: рухомого, випромінюючого, координат, пристрій, об'єкта, визначення
Код посилання
<a href="https://ua.patents.su/47-46245-pristrijj-dlya-viznachennya-koordinat-rukhomogo-viprominyuyuchogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Пристрій для визначення координат рухомого випромінюючого об’єкта</a>
Система для визначення координат та швидкості рухомого об’єкта
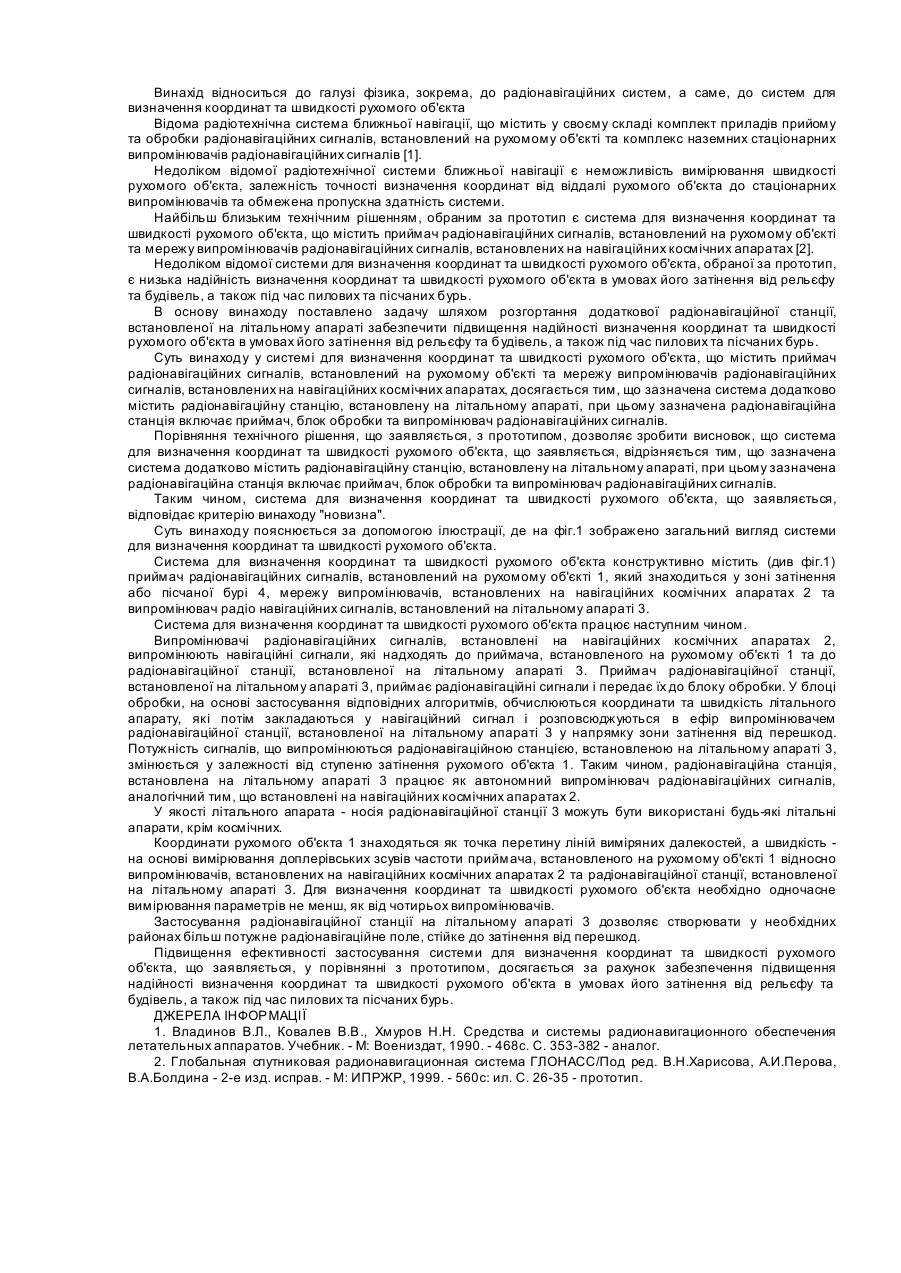
Номер патенту: 69200
Опубліковано: 16.08.2004
Автори: Мосов Сергій Петрович, Машков Олег Альбертович, Савченко Віталій Анатолійович, Кравченко Юрій Васильович
МПК: G01S 5/02
Мітки: рухомого, швидкості, система, визначення, координат, об'єкта
Формула / Реферат:
Система для визначення координат та швидкості рухомого об'єкта, що містить приймач радіонавігаційних сигналів, встановлений на рухомому об'єкті, та мережу випромінювачів радіонавігаційних сигналів, встановлених на навігаційних космічних апаратах, яка відрізняється тим, що система додатково містить радіонавігаційну станцію, встановлену на літальному апараті, яка включає приймач, блок обробки та випромінювач радіонавігаційних сигналів.
Пристрій для визначення координат точки зображення з максимальною яскравістю
Номер патенту: 22957
Опубліковано: 05.05.1998
Автори: Колесницький Олег Костянтинович, Кожем'яко Володимир Прокопович, Василецький Сергій Анатолійович
МПК: G06K 9/46
Мітки: визначення, точки, координат, зображення, яскравістю, максимальною, пристрій
Формула / Реферат:
Пристрій для визначення координат точки зображення з максимальною яскравістю, що містить фотоприймальний блок, у вигляді фотоматриці, регістр, дешифратор, блок управління, який відрізняється тим, що в нього введено другий регістр і другий дешифратор, причому фотоматриця являє собою Інтегральну матрицю фоточутливих біспін-приладів на загальній підкладинці, кожний вивід рядка фотоматриці з'єднаний з омічним контактом біспін-приладів цього рядка...
Пристрій для перетворення гіперболічної системи координат у декартову
Номер патенту: 63562
Опубліковано: 15.01.2004
Автори: Марігодов Володимир Костянтинович, Кисельов Олексій Олександрович, Осадчий Юрій Михайлович
МПК: G06F 7/544, G06F 7/548
Мітки: гіперболічної, пристрій, системі, перетворення, координат, декартову
Формула / Реферат:
Пристрій для перетворення гіперболічної системи координат у декартову, що містить послідовно з’єднані регістр першої гіперболічної координати, комутатор, блок додавання, вузол зв'язку координат, перший вхід блока віднімання, а також регістр другої гіперболічної координати, підключений до другого входу блока віднімання, і помножувач, який відрізняється тим, що в нього введені компаратор, лічильник номера ітерації перетворення, двопозиційний...
Електромагнітна система визначення координат інженерних комунікацій
Номер патенту: 45377
Опубліковано: 15.04.2002
Автори: Драбич Петро Петрович, Драбич Олег Петрович, Яворський Ігор Миколайович
МПК: G01V 3/10, G01R 33/00
Мітки: визначення, система, комунікацій, інженерних, координат, електромагнітна
Формула / Реферат:
Електромагнітна система визначення координат інженерних комунікацій, яка складається з ближнього, середнього і дальнього відносно осі комунікації паралельно розміщених на одній осі ідентичних магнітоприймачів, першого, другого і третього пристроїв віднімання, першого і другого вузькосмугових підсилювачів, навушних телефонів, аналого-цифрового перетворювача і цифрового індикатора, в якій вихід ближнього магнітоприймача з'єднаний з першим...
Спосіб визначення координат метеорного сліду

Номер патенту: 67664
Опубліковано: 15.06.2004
Автори: Антіпов Іван Євгенович, Коваль Юрій Олександрович, Нестеренко Георгій Вікторович, Бавикіна Вероніка Всеволодівна
МПК: G04G 7/00
Мітки: метеорного, координат, сліду, спосіб, визначення
Формула / Реферат:
Спосіб визначення координат метеорного сліду, який використовується для метеорного радіозв'язку (або синхронізації шкал часу), що полягає у використанні фазово-кутомірного способу визначення кутових координат метеорного сліду з двох просторово рознесених пунктів, який відрізняється тим, що для визначення кутових координат метеорного сліду в першому пункті радіолінії метеорного зв'язку (або синхронізації шкал часу) використовують сигнал...
Попередній патент: Комплект елементів для пломбування
Наступний патент: Носій запису, що несе стереосигнал та інформаційний сигнал
Випадковий патент: Вузол з'єднання бокової рами з колісною парою у візку вантажного залізничного вагона