Пристрій захисту від завад
Номер патенту: 25805
Опубліковано: 27.08.2007
Автори: Піза Дмитро Макарович, ТОМАЧИНСЬКИЙ МИКОЛА ТИМОФІЙОВИЧ
Формула / Реферат
Пристрій захисту від завад, що містить послідовно з'єднані двоканальну гостроспрямовану антену, перший канал прийому, перший суматор, блок формування вагових коефіцієнтів, запам'ятовуючий пристрій і керований підсилювач, другий вхід якого з'єднаний з другим входом блока формування вагових коефіцієнтів, а вихід підключений до другого входу першого суматора, вихід якого є виходом пристрою, а також синхронізатор, підключений до другого входу запом'ятовуючого пристрою, і другий канал прийому, з'єднаний з другим виходом антени, який відрізняється тим, що в нього додатково введені послідовно з'єднані неспрямована антена, третій канал прийому, комутатор, перший логарифмічний підсилювач, перший детектор, перший клапан, перший інтегратор, другий суматор, компаратор і схема АБО, що з'єднана з керуючим входом комутатора, а також послідовно з'єднані другий логарифмічний підсилювач, другий детектор, другий клапан і другий інтегратор, з'єднані з другим входом компаратора, причому другий вхід комутатора підключений до виходу другого каналу прийому, а вихід з'єднаний з другим входом керованого підсилювача, вихід першого каналу прийому з'єднаний з входом другого логарифмічного підсилювача, а другий вихід синхронізатора підключений до другого входу схеми АБО і до других входів першого і другого клапанів.
Текст
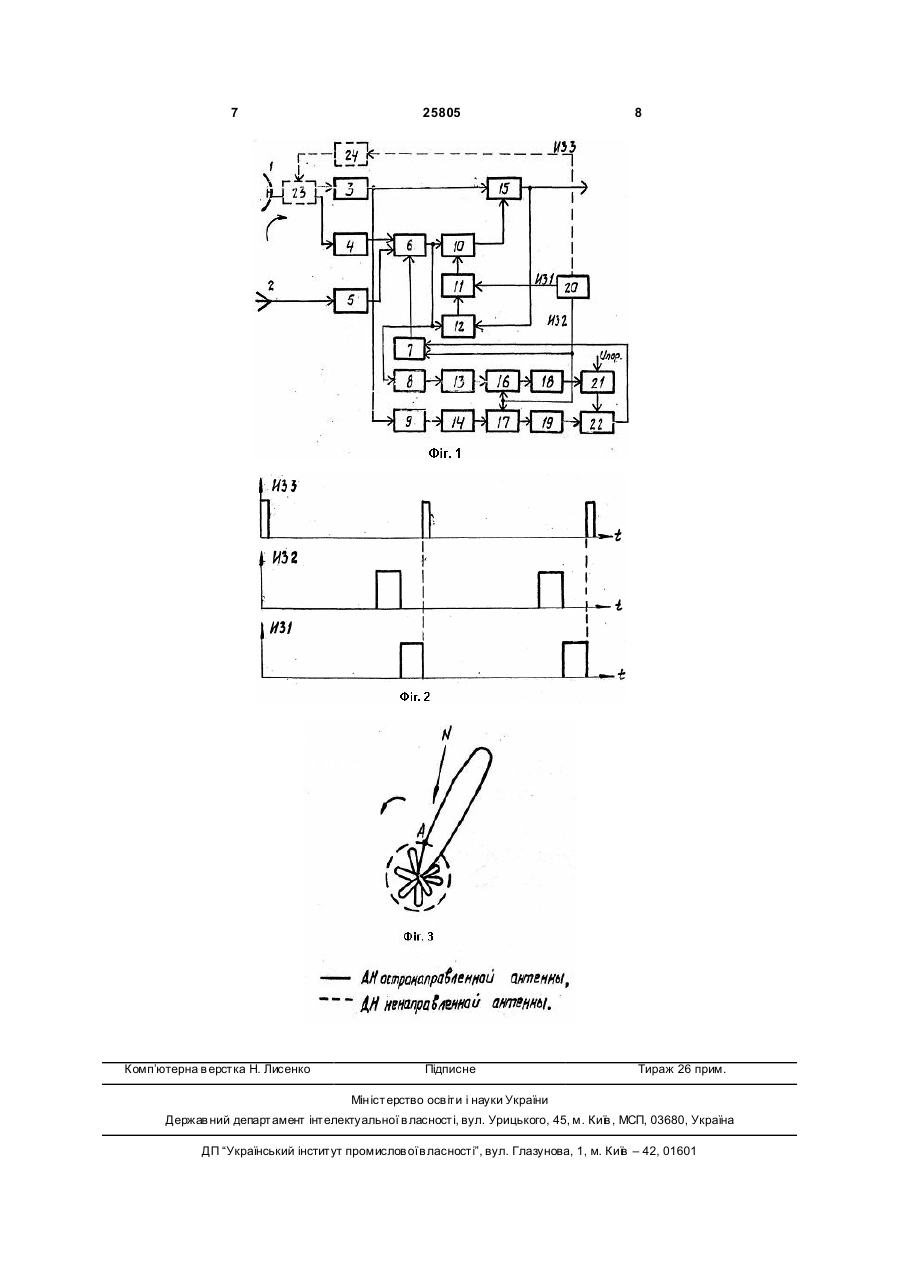
Пристрій захисту від завад, що містить послідовно з'єднані двоканальну гостроспрямовану антену, перший канал прийому, перший суматор, блок формування вагових коефіцієнтів, запам'ятовуючий пристрій і керований підсилювач, другий вхід якого з'єднаний з другим входом блока формування вагових коефіцієнтів, а вихід підключений до другого входу першого суматора, вихід якого є виходом пристрою, а також синхронізатор, підключений до другого входу запом'ятовуючого пристрою, і другий канал прийому, з'єднаний 3 поляризації в каналах прийому при розкладанні неполяризованого поля в ортогональний базис. В основу корисної моделі поставлена задача - підвищення завадозахищеності при впливі активних завад по бічних пелюстках діаграми спрямованості. Поставлена задача досягається тим, що в пристрій захисту від завад, що містить послідовно з'єднані двоканальну гостроспрямовану антену, перший канал прийому, перший суматор, блок формування вагових коефіцієнтів, ЗП і керований підсилювач, другий вхід якого з'єднаний з другим входом блоку формування вагових коефіцієнтів, а вихід підключений до другого входу першого суматора, вихід якого є виходом пристрою, а також синхронізатор, підключений до другого входу ЗП, і другий канал прийому, з'єднаний з другим виходом антени, додатково введені послідовно з'єднані неспрямована антена, третій канал прийому, комутатор, перший логарифмічний підсилювач, перший детектор, перший клапан, перший інтегратор, другий суматор, компаратор і схема АБО, що з'єднана з керуючим входом комутатора, а також послідовно з'єднані другий логарифмічний підсилювач, другий детектор, другий клапан і другий інтегратор, з'єднані з другим входом компаратора, причому другий вхід комутатора підключений до виходу др угого каналу прийому, а вихід з'єднаний із другим входом керованого підсилювача, вихід першого каналу прийому з'єднаний з входом другого логарифмічного підсилювача, а другий вихід синхронізатора підключений до другого входу схеми АБО і до др уги х входів першого і другого клапанів. Причинно-наслідковий зв'язок між сукупністю ознак винаходу і те хнічним результатом полягає в такому. Завдяки тому, що в пристрій додатково введені послідовно з'єднані спрямована антена, третій канал прийому, комутатор, перший логарифмічний підсилювач, перший детектор, перший клапан, перший інтегратор, другий суматор, компаратор і схема АБО, з'єднана з керуючим входом комутатора, а також послідовно з'єднані другий логарифмічний підсилювач, другий детектор, другий клапан і другий інтегратор, з'єднаний з другим входом компаратора, причому другий вхід комутатора підключений до виходу другого каналу прийому, а вихід з'єднаний з другим входом керованого підсилювача, вихід першого каналу прийому з'єднаний з входом другого логарифмічного підсилювача, а другий вихід синхронізатора підключений до другого входу схеми АБО і до други х входів першого і другого клапанів, підвищується завадозахищеність при впливі активних завад по бічних пелюстках діаграми спрямованості. Сутність корисної моделі пояснюється кресленнями. На Фіг.1 представлена структурна електрична схема пропонованого пристрою захисту від завад, на Фіг.2 наведені часові діаграми роботи синхронізатора, 25805 4 а на Фіг.3 приведені діаграми спрямованості гостроспрямованої і всеспрямованої антени. Пропонований пристрій захисту від завад (див. Фіг.1) містить двоканальну гостроспрямовану антену 1, допоміжну неспрямовану антену 2, перший 3, другий 4 і третій 5 канали прийому, комутатор 6, схему АБО 7, перший 8 і другий 9 логарифмічні підсилювачі, керований підсилювач 10, ЗП 11, блок формування вагових коефіцієнтів 12, перший 13 і другий 14 детектори, перший суматор-15, перший 16 і другий 17 клапани, перший 18 і другий 19 інтегратори, синхронізатор 20, другий суматор 21 і компаратор 22. Використання пристрою захисту від завад у складі РЛС передбачає наявність перемикача прийом/передача 23 і передавача 24, що наведені на кресленні для пояснення опису. Розглянемо роботу пропонованого пристрою захисту від завад у наступних завадових ситуаціях. 1. Вплив активних завад по бічних пелюстках діаграми спрямованості. У цьому випадку прийняті антенами 1 і 2 сигнали через перший 3 і третій 5 канали прийому надходять на входи автокомпенсатора завад, до складу якого входять керований підсилювач 10, ЗП 11, блок формування вагових коефіцієнтів 12 і суматор 15. При цьому завадові сигнали другого каналу прийому 4 на вихід комутатора 6 не проходять. У блоці формування вагових коефіцієнтів 12 під впливом завадового сигналу, що діє в третьому каналі прийому 5 і вихідного сигналу першого суматора 15, формуються керуючі сигнали, що через ЗП 11 надходять на керований підсилювач 10. У керованому підсилювачі 10 відбувається регулювання аргументу і модуля коефіцієнта передачі таким чином, щоб завадові сигнали на входах першого суматора 15 мали однакові амплітуди і були в протифазі. При цьому забезпечується ефективне заглушення активних шумових завад на виході пристрою захисту від завад. Причому формування вагових коефіцієнтів, а відповідно й адаптація параметрів автокомпенсатора, здійснюється наприкінці дистанції, тобто стосовно до використання в складі РЛС - перед випромінюванням зондувального сигналу передавача 24, що забезпечується синхронізатором 20 (див. Фіг.1 і 2 імпульси запуску 3 і 1). Завдяки цьому знижується заважаюча дія пасивних завад (сигналів, перевідбитих від природних і штучни х об'єктів) на самонастроювання параметрів автокомпенсатора завад. В решту часових інтервалів автокомпенсатор завад працює в режимі з фіксованими значеннями вагових коефіцієнтів, що запам'ятовуються в ЗП 11. Завадові сигнали з виходу першого каналу прийому 3 і з виходу третього каналу прийому 5 через комутатор 6 надходять також на входи першого 8 і другого 9 логарифмічних підсилювачів і далі на входи першого 13 і другого 14 детекторів. Після детектування завадові сигнали через відкриті клапани 16 і 17 надходять на інтегратори 18 і 19. Вихідний сигнал першого інтегратора 18 надходить на вхід др угого суматора 21, де додається до порога Uпор і далі надходить на перший 5 вхід компаратора 22, на другий вхід якого надходить завадовий сигнал з виходу другого інтегратора 19. Величину порога Uпор вибирають, виходячи з можливого рівня негативного «накриття» бічних пелюстків гостроспрямованої антени діаграмою спрямованості всеспрямованої антени. Доти, поки активна шумова завада діє по бічних пелюстках основної антени, вихідний сигнал першого інтегратора 18 U1 з ура хуванням порога Uпор перевищує сигнал другого інтегратора 19 U2, тобто U2U1+Uпор, то на виході компаратора 22 формується сигнал нульового рівня. При цьому комутатор 6 відключає третій канал прийому 5 і підключає до свого виходу другий канал прийому 4, що з'єднаний з ортогональним по поляризації виходом гостроспрямованої антени 1. Після переключення комутатора 6 у блоці формування вагових коефіцієнтів 12 по імпульсу запуску 1, що надходить із синхронізатора 20 на ЗП 11, формуються нові значення керуючих сигналів, під впливом яких відбувається заглушення активних шумових завад, що діють по головному променю діаграми спрямованості. Після закінчення імпульсу запуску 1 відбувається запам'ятовування керуючих сигналів до надходження наступного імпульсу запуску 1. Причому надалі, перед надходженням наступного імпульсу запуску 1, по імпульсу запуску 2, що надходить із другого виходу синхронізатора 20 на схему АБО 7, комутатор 6 «примусово» підключає до свого виходу третій канал прийому 5. При цьому також відкриваються клапани 16 і 17, і за новим значенням сигналів, що надходять з ви ходів інтеграторів 18 і 19, виробляється аналіз співвідношення сигналів у першому 3 і третьому 5 каналах прийому, тобто визначається чи знаходиться постановник активних завад у головному промені чи вже «змістився» в область бічних пелюстків. У момент примусового переключення комутатора 6 для 25805 6 аналізу співвідношень сигналів у каналах автокомпенсатор завад працює при фіксованих значеннях керуючих сигналів, що визначається відсутністю імпульсу запуску 1 (див. Фіг.2). Якщо в процесі аналізу встановлено, що постановник активних завад знаходиться в напрямку головного променя, тобто U2>U1+Uпор, то комутатор 6 перед черговим циклом адаптації параметрів автокомпенсатора знову підключає до свого виходу др угий канал прийому 4. У противному випадку комутатором 6 до допоміжного входу автокомпенсатора (до входу керованого підсилювача 10) підключається третій канал прийому 5 зі спрямованою антеною 2. У такий спосіб здійснюється заглушення активних шумових завад, що діють як з напрямку бічних пелюстків, так і з напрямку головного променя діаграми спрямованості. Слід зазначити, що можливі також інші схемні побудови запропонованого пристрою захисту від завад. Зокрема, замість логарифмічних підсилювачів можуть бути застосовані лінійні схеми. У цьому випадку порівнянню сигналів повинна передувати схема розподілу. Можлива також відома заміна операції множення в блоці формування вагових коефіцієнтів операціями додавання з попереднім логарифмуванням і без нього. Однак, усі ці схемні побудови не виходять за рамки запропонованого технічного рішення, сутність якого полягає в адаптивному переключенні допоміжних антен із відповідними прийомними каналами для забезпечення завадозахищености РЛС при впливі активних завад по головному променю і бічних пелюстках основної антени. Застосування пропонованої корисної моделі дозволить одночасно забезпечити високу завадозахищеність РЛС при впливі активних маскуючих завад по головному і бічному пелюстках діаграми спрямованості. Підвищення завадозахищеності РЛС досягається за рахунок застосування всеспрямованої антени, третього каналу прийому і комутатора, керованого вихідним сигналом схеми, до складу якої входять логарифмічні підсилювачі, детектори, клапани, інтегратори, суматор, компаратор і схема АБО. Час, протягом якого може бути виконане автоматичне переключення каналів, складає одиниці мікросекунд. Виграш у завадозахищеності РЛС, що може бути забезпечений за рахунок підвищення чутливості допоміжного каналу, складає 6...8дб. У випадку застосування хаотично поляризованої завади на борту постановника активних завад виграш у завадозахищеності РЛС визначається ефективністю роботи автокомпенсатора завад і може складати 25...30дб. 7 Комп’ютерна в ерстка Н. Лисенко 25805 8 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for interference protection
Автори англійськоюPiza Dmytro Makarovych, Tomachynskyi Mykola Tymofiiovych
Назва патенту російськоюУстройство для защиты от помех
Автори російськоюПиза Дмитрий Макарович, Томачинский Николай Тимофеевич
МПК / Мітки
МПК: G01S 7/36
Мітки: пристрій, захисту, завад
Код посилання
<a href="https://ua.patents.su/4-25805-pristrijj-zakhistu-vid-zavad.html" target="_blank" rel="follow" title="База патентів України">Пристрій захисту від завад</a>
Пристрій для захисту від активних завад
Номер патенту: 19475
Опубліковано: 15.12.2006
Автори: Піза Дмитро Макарович, ТОМАЧИНСЬКИЙ МИКОЛА ТИМОФІЙОВИЧ, Громаковський Володимир Васильович
МПК: G01S 1/00
Мітки: завад, активних, пристрій, захисту
Формула / Реферат:
Пристрій для захисту від активних завад, що містить гостронаправлену антену, допоміжну ненаправлену антену, основний і компенсаційний канали прийому, блок автокомпенсатора, перший вхід якого з'єднаний з виходом приймача основного каналу прийому, другий вхід автокомпенсатора з'єднаний через підсилювальний блок з виходом приймача компенсаційного каналу прийому, який відрізняється тим, що в каналах прийому введені блок нормування вхідного...
Пристрій адаптивної компенсації активних шумових завад
Номер патенту: 69127
Опубліковано: 16.08.2004
Автор: Головань Артур Вячеславович
МПК: G01S 7/36
Мітки: адаптивної, завад, компенсації, шумових, активних, пристрій
Формула / Реферат:
Пристрій адаптивної компенсації активних шумових завад, що включає антенну систему, яка містить 2N антенних елементів з взаємно ортогональною поляризацією, два канали, один з яких зв'язаний з антенними елементами вертикальної поляризації, а другий - з елементами горизонтальної поляризації, канали розділені на N підканалів, кожний з яких містить ваговий підсилювач, вхід якого підключений до виходу антенного елементу і до входу корелятора, а...
Система захисту від завад
Номер патенту: 20787
Опубліковано: 15.02.2007
Автори: ТОМАЧИНСЬКИЙ МИКОЛА ТИМОФІЙОВИЧ, Траілін Вячеслав Федорович, Піза Дмитро Макарович
МПК: G01S 7/36, G01S 13/52
Мітки: система, завад, захисту
Формула / Реферат:
Система захисту від завад, що містить основний і допоміжний канали прийому, блок селекції рухомих цілей (СРЦ) і автокомпенсатор, що містить перший фазообертач, два балансних підсилювачі, віднімач і корелятор зворотного зв'язку (КЗЗ), що містить другий фазообертач, два балансних помножувачі і чотири фільтри нижніх частот (ФНЧ), при цьому вхід першого фазообертача і першого балансного підсилювача з'єднані з виходом допоміжного каналу прийому,...
Пристрій компенсації активних шумових завад
Номер патенту: 37868
Опубліковано: 15.12.2003
Автори: Мокеєв Юрій Геннадійович, Падалко Віктор Григорович, Лаврентьєв Володимир Миколайович, Траілін Вячеслав Федорович, Немчин Олександр Федорович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Каспирович Олександр Геннадійович, Мирошниченко Михайло Іванович
МПК: G01S 7/36
Мітки: шумових, активних, компенсації, завад, пристрій
Формула / Реферат:
Пристрій компенсації активних шумових завад, що містить блок обчислення вагових коефіцієнтів, лінію затримки основного каналу, лінію затримки додаткового каналу, блок помноження, блок віднімання, причому вихід лінії затримки додаткового каналу сполучений із першим входом блока помноження, вихід якого сполучений із першим входом блока віднімання, другий вхід блока віднімання підключений до виходу лінії затримки основного каналу, а вихід блока...
Пристрій компенсації активних шумових завад
Номер патенту: 38217
Опубліковано: 15.05.2001
Автори: Мирошниченко Михайло Іванович, Попов Олег Якович, Немчин Олександр Федорович, Каспирович Олександр Геннадійович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Мокеєв Юрій Геннадійович, Луханін Михайло Іванович, Лаврентьєв Володимир Миколайович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ
МПК: G01S 7/36
Мітки: пристрій, завад, компенсації, шумових, активних
Формула / Реферат:
1. Пристрій компенсації активних шумових завад, що включає блок обчислення вагових коефіцієнтів, лінію затримки основного каналу, лінію затримки додаткового каналу, блок множення, блок віднімання, причому входи лінії затримки основного каналу і лінії затримки додаткового каналу є входами пристрою вихід лінії затримки додаткового каналу сполучений із першим входом блока множення, вихід якого сполучений із входом блока віднімання, перший вхід...
Попередній патент: Канал вимірювання кутових швидкостей літальних апаратів для лазерної інформаційно-вимірювальної системи
Наступний патент: Інактивуючий розчин “мік ір” для обробки патологічного матеріалу при туберкульозі для проведення полімеразної ланцюгової реакції
Випадковий патент: Щипковий музичний інструмент зі струнотримачем рижкова