Пристрій для автоводіння машинно-тракторного агрегата
Номер патенту: 26861
Опубліковано: 29.12.1999
Автори: Козлов Володимир Петрович, Мироненко Валентин Григорович, Пенцан Олег Дмитрович, Погорілий Віктор Васильович, Лободко Микола Миколайович, Адамчук Валерій Васильович
Формула / Реферат
1. Устройство для автовождения машинно-тракторного агрегата, содержащее подключенные соответственно к первому и второму входам вычислительного устройства гироскопический датчик курсового рассогласования и датчик положения направляющих колес, механизм управления повоторoм направляющих колес, соединенный с выходом вычислительного устройства, отличающееся тем, чтооноснабженодатчикомпроиденногопути,
выход которого соединен с третьим входом вычислительного устройства.
2. Устройство для автовождения машинно-тракторного агрегата по п.1, отличающееся тем, что оно содержит выключатель формирования программы разворота и выключатель выполнения разворота в режиме автоматического управления на рулевой колонке в кабине трактора, выходы которых соединены соответственно с четвертым и пятым входами вычислительного устройства.
Текст
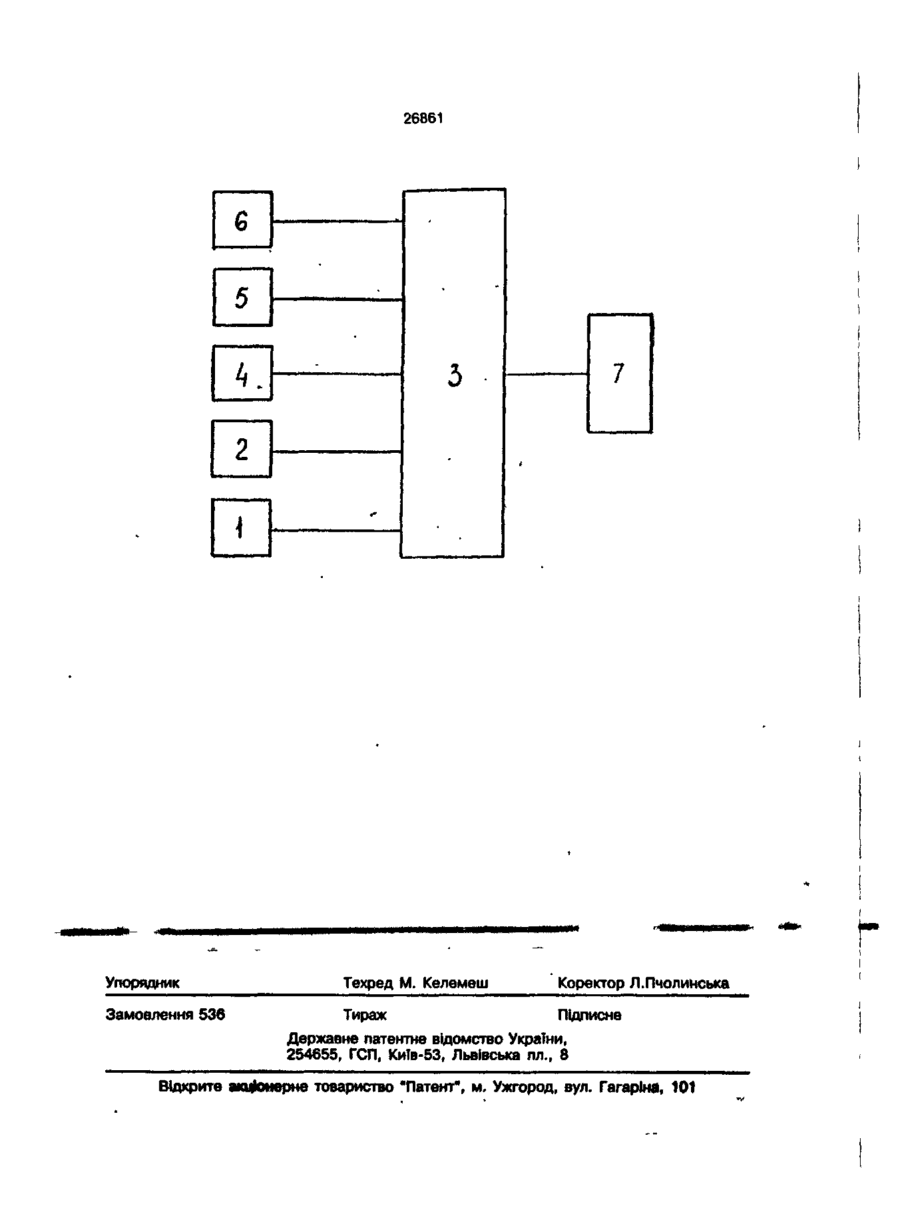
1. Устройство для автовождения машинно-тракторного агрегата, содержащее подключенные к входам вычислительного устройства гироскопический датчик курсового рассогласования и датчик положе ния направляющих колес, механизм управления поворотом направляющих колес, соединенный с выходом вычислительного устройства, о т л и ч а ю щ е е с я тем, что оно снабжено датчиком пройденного пути, выход которого соединен с отдельным входом вычислительного устройства. 2. Устройство для автовождения машинно-тракторного агрегата по п. 1, о т л и ч а ю щ е е с я тем, что оно содержит выключатель формирования программы разворота и выключатель выполнения разворота в режиме автоматического управления на рулевой колонке в кабине трактора, выходы которых соединены с отдельными входами вычислительного устройства. Изобретение относится к сельскому хозяйству, а именно к автоматизации самоходных агрегатов и может быть использовано для автоматического вождения широкозахватных сельскохозяйственных агрегатов. Известны радионавигационные системы автовождения машинно-тракторных агрегатов, содержащие измерительные преобразователи радионавигационных параметров, датчики положения направляющих колес и бокового крена трактора, вычислительное устройство и механизм управления поворотом направляющих колес трактора (Авт.св. СССР № 1630625, кл. А 01 В 69/04, 1991). В этих системах программа движения закладывается в вы числитель, текущие измеренные координаты сравниваются с программируемыми и вырабатывается сигнал рассогласования, который подается на механизм управления направлением движения. Основной недостаток таких систем состоит в необходимости организации стационарных пунктов навигации в определенных местах каждого поля. Известны методы автовождения, основанные на определении и регулировании курса движения с помощью гироскопа (Л.Г.Малорацкий и др. Бесконтактные системы автоматического вождения машинно-тракторных а г р е г а т о в / / О б з о р ЦНИИТЭИ, № 5. Сер. Тракторы и двигатели. - М., 1982). Однако устройства, в Оч О 26861 которых для управления используется только сигнал гироскопа, имеют низкую точность и не обеспечивают требуемого качества исполнения с.х. операций. Известно устройство для автовождения машинно-тракторного агрегата, содержащее гироскопический датчик курсового рассогласования, датчик положения направляющих колес, вычислительное устройство, входы которого соединены с датчиками, и механизм управления поворотом направляющих колес трактора, связанный с выходом вычислительного устройства. В известном устройстве для определения отклонения JOT борозды имеется механический щуп.• Устройство находится в равновесии, когда расстояние от борозды соответствует заданному значению и ось гироскопа совпадает с продольной осью трактора. Это устройство наиболее близкое к предлагаемому по технической сущности и поэтому принято в качестве прототипа (Л.Г.Малорацкий и др. Бесконтактные системы автоматического вождения машинно-тракторных агрегатов//Обзор ЦНИИТЭИ, № 5. Сер Тракторы и двигатели. - М., 1982. - С. 25). Работа известного устройства удовлетворительна только при наличии борозды при каждом проходе агрегата, что сужает область его применения при выполнении сельскохозяйственных работ. При применении устройства на широкозахватных сельскохозяйственных агрегатах затруднительно использовать механический щуп, а при работе без щупа с одним датчиком курсового рассогласования возможен недопустимый боковой снос агрегата на длине гона. В основу изобретения поставлена задача создать устройство для автовождения машинно-тракторного агрегата, в котором новое сочетание датчиков позволило бы определить линейное отклонение машинно-тракторного агрегата от заданного курса без дополнительных щупов и борозд и за счет этого позволить использовать устройство автовождения для широкозахватных сельскохозяйственных агрегатов. 5 10 15 20 25 30 35 40 45 50 вычислительного устройства, отличается тем, что оно снабжено дачтиком пройденного пути, выход которого соединен с отдельным входом вычислительного устройства. Кроме того, устройство для автовождения машинно-тракторного агрегата может .отличаться тем, что для облегчения и автоматизации разворотов, оно имеет выключатели формирования программы разворота при его прохождении в режиме ручного управления и выполнения разворота в режиме автоматического управления, установленные на рулевой колонке в кабине трактора и соединенные с отдельными входами вычислителя. На чертеже изображена структурная схема системы. Устройство для автовождения машинно-тракторного агрегата содержит датчик положения направляющих колес 1, гироскопический датчик курсового рассогласования 2, которые подключены к входам вычислительного устройства 3. Устройство содержит также датчик пройденного пути 4, выключатель формирования программы разворота 5, выключатель выполнения разворота в режиме автоматического управления 6, выходы которых соединены с отдельными входами вычислителя 3. Выход вычислительного устройства 3 связан с механизмом управления 7 поворотом направляющих колес трактора. Вычислительное устройство 3 с заданным циклом производит опрос датчиков 1, 2, 4, выключателей 5, 6 и управляет одним из следующих режимов: - автоматическое вождение агрегата на гоне; - запись программы разворота при ручном управлении; - автоматический разворот по записанной программе. Управляющий сигнал на исполнительный механизм 7 при движении на гоне в каждый момент времени t, с начала выхода из допустимой зоны линейного отклонения от заданной траектории до возврата агрегата на заданную траекторию определяется по формуле Поставленная задача решается благодаря тому, что устройство для автовоЦ-К, ждения машинно-тракторного агрегата, содержащее подключенные ко входам вы- 55 числительного устройства гироскопический датчик курсового рассогласования и где Ц - управляющий сигнал на поворот датчик положения направляющих колес и направляющих колес трактора; механизм управления поворотом направК,, К^ - коэффициенты пропорциоляющих колес, соединенный с выходом нальности; 26861 p, - сигнал датчика положения направляющих колес, определенный в момент времени t; а кх - сигнал датчика курсового рас5 согласования, определенный в момент времени t с учетом зоны нечувствительности устройства к изменению направления движения; Ц - отрезки пути, пройденные агрега- 10 том при каждом из зафиксированных значений а
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for autodriving machine and tractor unit
Автори англійськоюMyronenko Valentyn Hryhorovych, Pohorilyi Viktor Vasyliovych, Adamchuk Valerii Vasyliovych, Lobodko Mykola Mykolaiovych, Pentsan Oleh Dmytrovych, Kozlov Volodymyr Petrovych
Назва патенту російськоюУстройство для автовождения машинно-тракторного агрегата
Автори російськоюМироненко Валентин Григорьевич, Пугачева Тамила Николаевна, Адамчук Валерий Васильевич, Лободко Николай Николаевич, Пенцан Олег Дмитриевич, Козлов Владимир Петрович
МПК / Мітки
МПК: A01B 69/04
Мітки: агрегата, машинно-тракторного, автоводіння, пристрій
Код посилання
<a href="https://ua.patents.su/4-26861-pristrijj-dlya-avtovodinnya-mashinno-traktornogo-agregata.html" target="_blank" rel="follow" title="База патентів України">Пристрій для автоводіння машинно-тракторного агрегата</a>
Спосіб стабілізації прямолінійного руху машинно-тракторного агрегату
Номер патенту: 24282
Опубліковано: 07.07.1998
Автори: Надикто Володимир Трохимович, Савенко Петро Степанович
МПК: A01B 69/00
Мітки: руху, стабілізації, прямолінійного, агрегату, машинно-тракторного, спосіб
Формула / Реферат:
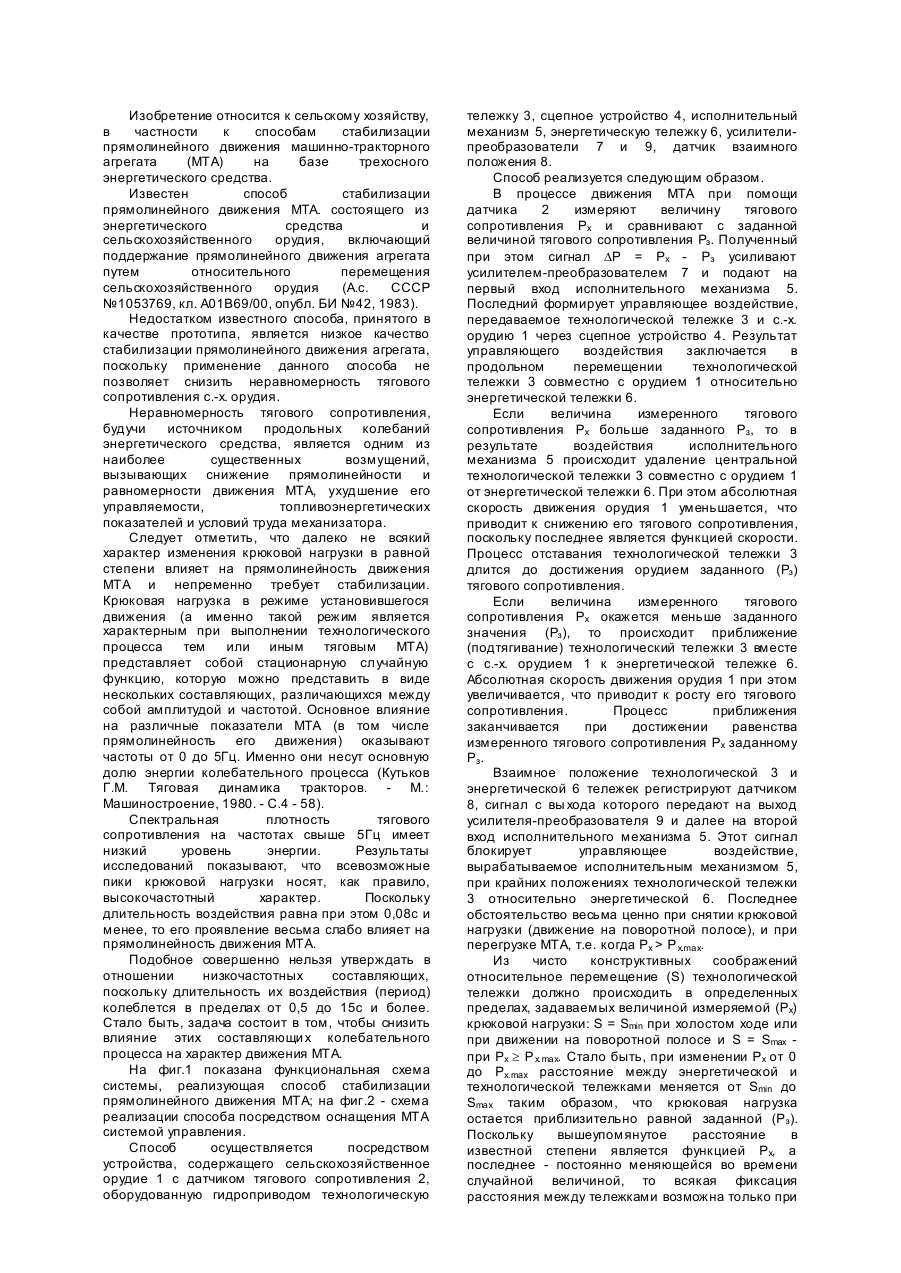
Способ стабилизации прямолинейного движения машинно-тракторного агрегата, состоящего с энергетической и, соединенной с сельскохозяйственным орудием, технологической тележек, включающий поддержание прямолинейного движения агрегата путем относительного перемещения сельскохозяйственного орудия, отличающийся тем, что непрерывно измеряют тяговое сопротивление сельскохозяйственного орудия и, в зависимости от его полученного значения, изменяют...
Пристрій автоводіння бурякозбиральної машини
Номер патенту: 6614
Опубліковано: 29.12.1994
Автори: Кашурко Олександр Савелійович, Анюхін Володимир Михайлович, Кузьмінов Вадим Георгійович, Черняков Фелікс Аронович, Умеренко Аркадій Аркадійович
МПК: A01B 69/04
Мітки: машини, автоводіння, пристрій, бурякозбиральної
Формула / Реферат:
(57) Устройство автовождения свеклоуборочной машины, содержащее коромысло, гидроусилитель руля с гидрораспределителем, гидроцилиндр поворота колес машины, сообщенный с гидрораспределителем посредством цепи обратной связи, гидроследящий контур автовождения с поворотным вокруг вертикальной оси копиром рядков свеклы, при этом последний кинематически связан с двуплечим рычагом, отличающееся тем, что ось коромысла расположена на копире рядков...
Пристрій для утворювання направляючих щілин і водіння по них сільськогосподарських машин
Номер патенту: 18523
Опубліковано: 25.12.1997
Автори: Полушкін Олексій Володимирович, Лихобаба Юрій Васильович, Ангелов Віталій Михайлович, Журавльов Григорій Павлович
МПК: A01B 13/02, A01B 69/00
Мітки: щілин, них, машин, сільськогосподарських, пристрій, направляючих, утворювання, водіння
Формула / Реферат:
1. Устройство для образования направляющих щелей и вождения по ним сельскохозяйственных машин, содержащее щелеватель-направитель в виде ножа и дисковый нож, смонтированные на раме орудия при помощи стойки, отличающееся тем, что нож щелевателя-направителя выполнен с тупым углом вхождения в почву и снабжен уширителями стенок щели, смонтированными в нижней части стойки, а его нижний конец расположен за вертикальной осью симметрии дискового...
Гідравлічна система дистанційного управління секціями вугледобувного агрегата
Номер патенту: 13614
Опубліковано: 25.04.1997
Автори: Озерянський Генріх Йосифович, Стрєкалов Анатолій Іванович, Савченко Анатолій Тихонович, Беккер Гарасим Харитонович
МПК: E21D 23/16
Мітки: гідравлічна, вугледобувного, дистанційного, секціями, агрегата, управління, система
Формула / Реферат:
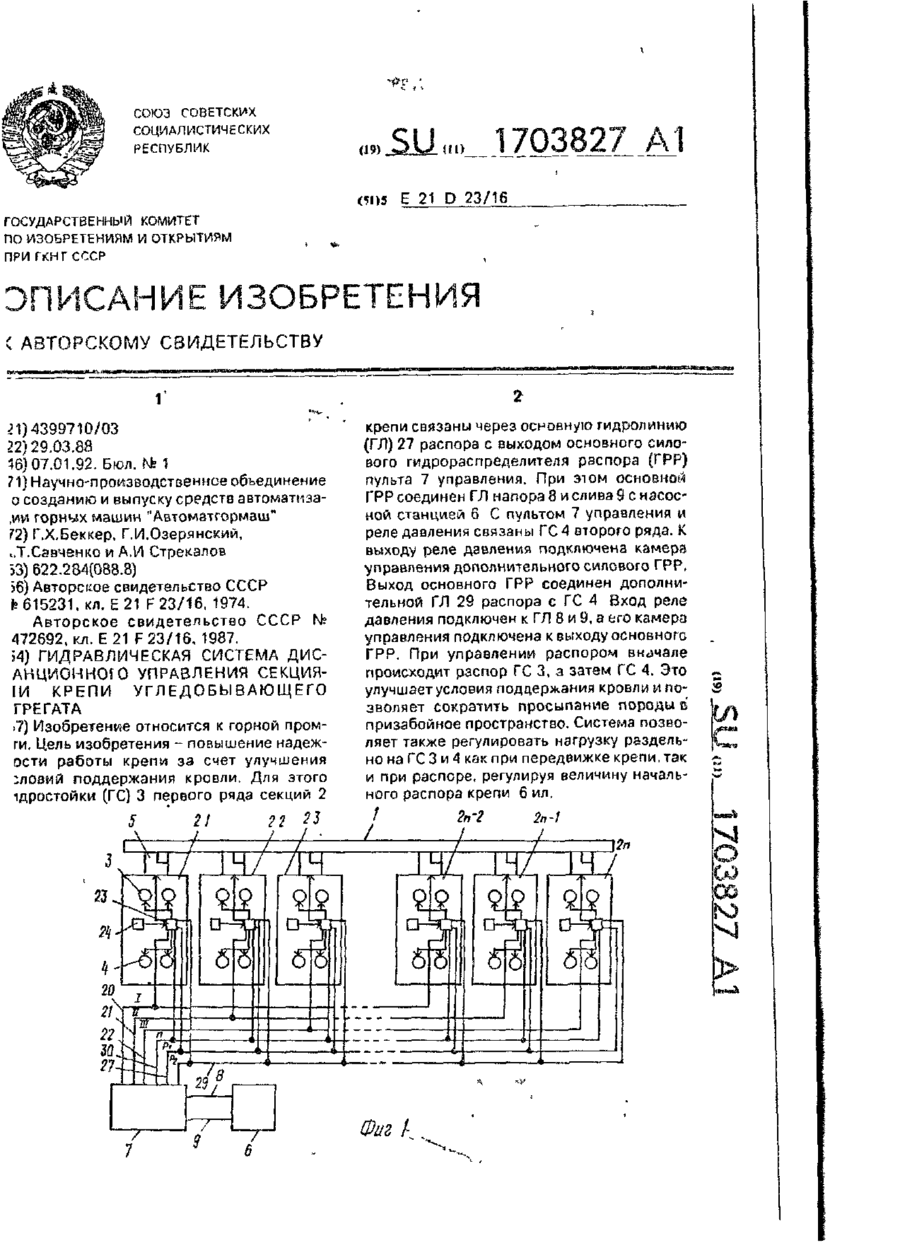
Гидравлическая система дистанционного управления секциями крепи угледобывающего агрегата, содержащая гидростойки первого ряда, связанные через основную гидролинию распора с выходом основного силового гидрораспределителя распора пульта управления, соединенного линиями напора и слива с насосной станцией, гидростойки второго ряда, связанные с пультом управления и реле давления, отличающаяся тем, что, с целью повышения надежности работы крепи...
Спосіб визначення окремих значень амплітудно-фазової частотної характеристики всережимного відцентрового регулятора частоти обертання колінчатого вала тракторного дизельного двигуна
Номер патенту: 33
Опубліковано: 30.04.1993
Автор: Музичук Федір Максимович
МПК: F02D 1/08
Мітки: обертання, регулятора, всережимного, значень, відцентрового, двигуна, спосіб, вала, характеристики, окремих, тракторного, визначення, частотної, дизельного, колінчатого, амплітудно-фазової, частоти
Формула / Реферат:
Формула изобретенияСпособ определения частных значений амплитудно-фазовой частотной характеристики всережимного центробежного регулятора частоты вращения коленчатого вала тракторного дизельного двигателя, характеризующийся тем, что задают частоту вращения валика регулятора, соединяют рычаг управления регулятора с имитатором гармонических колебаний и регистрируют колебания рычага управления и позирующего органа топливного насоса,...
Попередній патент: Спосіб одержання (22r,s)-16 альфа,17 альфа-бутилідендіокси-11 бета, 21-дигідроксипрегна-1,4-дієн-3,20-діону
Наступний патент: Пристрій для відтворення інформації з носія запису та носій запису для використання в такому пристрої
Випадковий патент: Спосіб корекції дисмікроелементемії