Спосіб стабілізації прямолінійного руху машинно-тракторного агрегату
Номер патенту: 24282
Опубліковано: 07.07.1998
Автори: Надикто Володимир Трохимович, Савенко Петро Степанович
Формула / Реферат
Способ стабилизации прямолинейного движения машинно-тракторного агрегата, состоящего с энергетической и, соединенной с сельскохозяйственным орудием, технологической тележек, включающий поддержание прямолинейного движения агрегата путем относительного перемещения сельскохозяйственного орудия, отличающийся тем, что непрерывно измеряют тяговое сопротивление сельскохозяйственного орудия и, в зависимости от его полученного значения, изменяют скорость поступательного движения технологической тележки относительно энергетической.
Текст
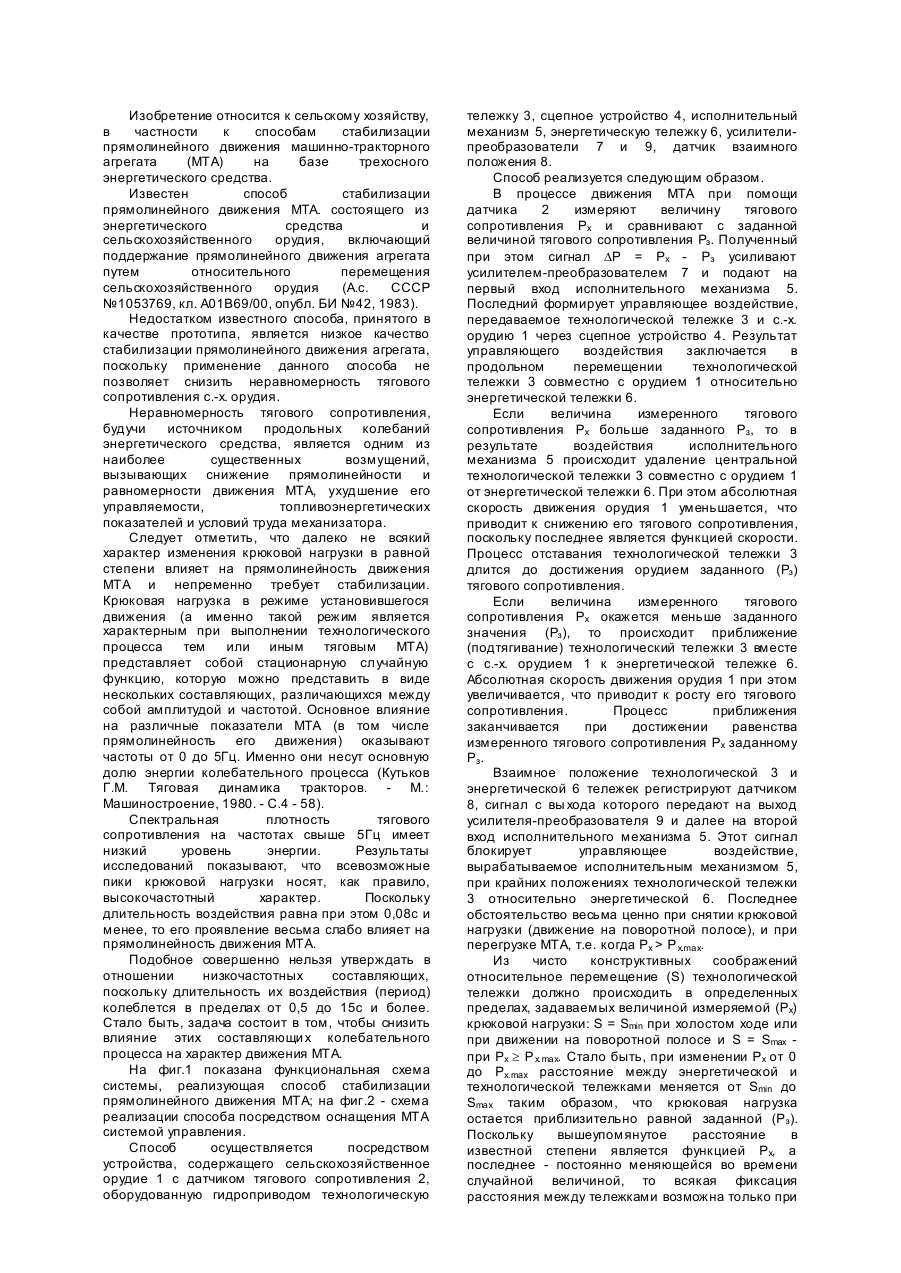
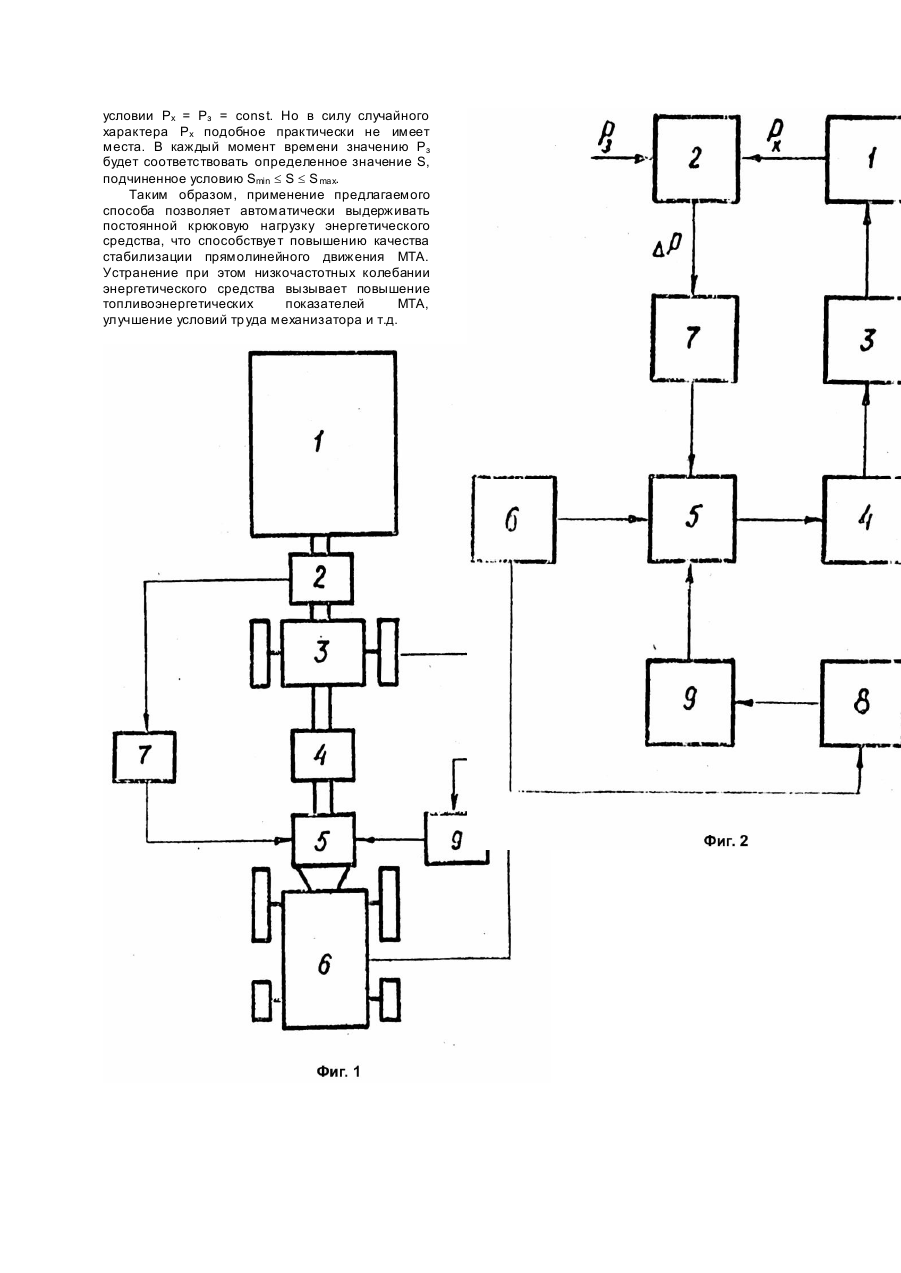
Изобретение относится к сельскому хозяйству, в частности к способам стабилизации прямолинейного движения машинно-тракторного агрегата (МТА) на базе трехосного энергетического средства. Известен способ стабилизации прямолинейного движения МТА. состоящего из энергетического средства и сельскохозяйственного орудия, включающий поддержание прямолинейного движения агрегата путем относительного перемещения сельскохозяйственного орудия (А.с. СССР №1053769, кл. A01B69/00, опубл. БИ №42, 1983). Недостатком известного способа, принятого в качестве прототипа, является низкое качество стабилизации прямолинейного движения агрегата, поскольку применение данного способа не позволяет снизить неравномерность тягового сопротивления с.-х. орудия. Неравномерность тягового сопротивления, будучи источником продольных колебаний энергетического средства, является одним из наиболее существенных возмущений, вызывающих снижение прямолинейности и равномерности движения МТА, ухудшение его управляемости, топливоэнергетических показателей и условий труда механизатора. Следует отметить, что далеко не всякий характер изменения крюковой нагрузки в равной степени влияет на прямолинейность движения МТА и непременно требует стабилизации. Крюковая нагрузка в режиме установившегося движения (а именно такой режим является характерным при выполнении технологического процесса тем или иным тяговым МТА) представляет собой стационарную случайную функцию, которую можно представить в виде нескольких составляющих, различающихся между собой амплитудой и частотой. Основное влияние на различные показатели МТА (в том числе прямолинейность его движения) оказывают частоты от 0 до 5Гц. Именно они несут основную долю энергии колебательного процесса (Кутьков Г.М. Тяговая динамика тракторов. - М.: Машиностроение, 1980. - С.4 - 58). Спектральная плотность тягового сопротивления на частотах свыше 5Гц имеет низкий уровень энергии. Результаты исследований показывают, что всевозможные пики крюковой нагрузки носят, как правило, высокочастотный характер. Поскольку длительность воздействия равна при этом 0,08с и менее, то его проявление весьма слабо влияет на прямолинейность движения МТА. Подобное совершенно нельзя утверждать в отношении низкочастотных составляющих, поскольку длительность их воздействия (период) колеблется в пределах от 0,5 до 15с и более. Стало быть, задача состоит в том, чтобы снизить влияние этих составляющи х колебательного процесса на характер движения МТА. На фиг.1 показана функциональная схема системы, реализующая способ стабилизации прямолинейного движения МТА; на фиг.2 - схема реализации способа посредством оснащения МТА системой управления. Способ осуществляется посредством устройства, содержащего сельскохозяйственное орудие 1 с датчиком тягового сопротивления 2, оборудованную гидроприводом технологическую тележку 3, сцепное устройство 4, исполнительный механизм 5, энергетическую тележку 6, усилителипреобразователи 7 и 9, датчик взаимного положения 8. Способ реализуется следующим образом. В процессе движения МТА при помощи датчика 2 измеряют величину тягового сопротивления Px и сравнивают с заданной величиной тягового сопротивления Pз. Полученный при этом сигнал DP = Px - Pз усиливают усилителем-преобразователем 7 и подают на первый вход исполнительного механизма 5. Последний формирует управляющее воздействие, передаваемое технологической тележке 3 и с.-х. орудию 1 через сцепное устройство 4. Результат управляющего воздействия заключается в продольном перемещении технологической тележки 3 совместно с орудием 1 относительно энергетической тележки 6. Если величина измеренного тягового сопротивления Px больше заданного Pз, то в результате воздействия исполнительного механизма 5 происходит удаление центральной технологической тележки 3 совместно с орудием 1 от энергетической тележки 6. При этом абсолютная скорость движения орудия 1 уменьшается, что приводит к снижению его тягового сопротивления, поскольку последнее является функцией скорости. Процесс отставания технологической тележки 3 длится до достижения орудием заданного (Pз) тягового сопротивления. Если величина измеренного тягового сопротивления Px окажется меньше заданного значения (Pз), то происходит приближение (подтягивание) технологический тележки 3 вместе с с.-х. орудием 1 к энергетической тележке 6. Абсолютная скорость движения орудия 1 при этом увеличивается, что приводит к росту его тягового сопротивления. Процесс приближения заканчивается при достижении равенства измеренного тягового сопротивления Px заданному Pз. Взаимное положение технологической 3 и энергетической 6 тележек регистрируют датчиком 8, сигнал с вы хода которого передают на выход усилителя-преобразователя 9 и далее на второй вход исполнительного механизма 5. Этот сигнал блокирует управляющее воздействие, вырабатываемое исполнительным механизмом 5, при крайних положениях технологической тележки 3 относительно энергетической 6. Последнее обстоятельство весьма ценно при снятии крюковой нагрузки (движение на поворотной полосе), и при перегрузке МТА, т.е. когда Px > P x.max. Из чисто конструктивных соображений относительное перемещение (S) технологической тележки должно происходить в определенных пределах, задаваемых величиной измеряемой (Px) крюковой нагрузки: S = Smin при холостом ходе или при движении на поворотной полосе и S = Smax при Px ³ P x.max. Стало быть, при изменении Px от 0 до Px.max расстояние между энергетической и технологической тележками меняется от Smin до Smax таким образом, что крюковая нагрузка остается приблизительно равной заданной (Pз). Поскольку вышеупомянутое расстояние в известной степени является функцией Px, а последнее - постоянно меняющейся во времени случайной величиной, то всякая фиксация расстояния между тележками возможна только при условии Px = Pз = const. Но в силу случайного характера Px подобное практически не имеет места. В каждый момент времени значению Pз будет соответствовать определенное значение S, подчиненное условию Smin £ S £ S max. Таким образом, применение предлагаемого способа позволяет автоматически выдерживать постоянной крюковую нагрузку энергетического средства, что способствуе т повышению качества стабилизации прямолинейного движения МТА. Устранение при этом низкочастотных колебании энергетического средства вызывает повышение топливоэнергетических показателей МТА, улучшение условий тр уда механизатора и т.д.
ДивитисяДодаткова інформація
МПК / Мітки
МПК: A01B 69/00
Мітки: машинно-тракторного, прямолінійного, спосіб, агрегату, стабілізації, руху
Код посилання
<a href="https://ua.patents.su/2-24282-sposib-stabilizaci-pryamolinijjnogo-rukhu-mashinno-traktornogo-agregatu.html" target="_blank" rel="follow" title="База патентів України">Спосіб стабілізації прямолінійного руху машинно-тракторного агрегату</a>
Спосіб стабілізації кутового руху літальнього апарату

Номер патенту: 16950
Опубліковано: 29.08.1997
Автори: Натушкін Володимир Федорович, Дронь Микола Михайлович
МПК: B64C 13/00
Мітки: апарату, літального, спосіб, стабілізації, руху, кутового
Спосіб швидкодіючої стабілізації параметрів електричної енергії у багатофазній системі
Номер патенту: 299
Опубліковано: 30.04.1993
Автори: Мостовяк Іван Васильович, Селиверстов Михайло Анатолійович, Новський Володимир Олександрович, Фартушок Ігор Михайлович, Шидловський Анатолій Корнійович
Мітки: багатофазній, енергії, спосіб, стабілізації, швидкодіючої, електричної, параметрів, системі
Формула / Реферат:
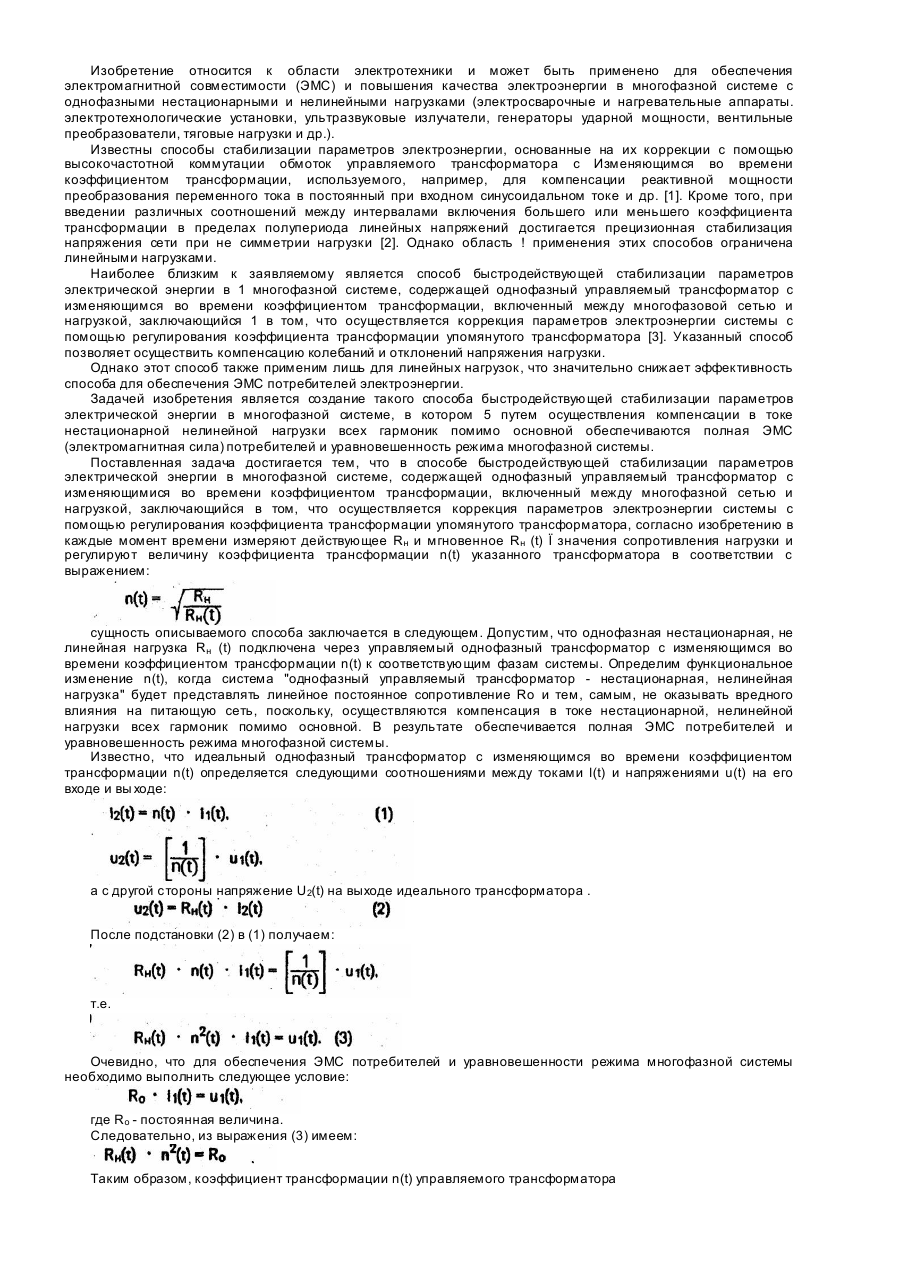
Способ быстродействующей стабилизации параметров электрической энергии в многофазной системе, содержащей однофазный управляемый трансформатор с изменяющимся во времени коэффициентом трансформации, включенный между многофазной сетью и нагрузкой, заключающийся В том. что осуществляется коррекция параметров электроэнергии системы с помощью регулирования коэффициента трансформации упомянутого трансформатора, отличающийся тем, что в каждый момент...
Спосіб швидкодіючої стабілізації параметрів електричної енергії у багатофазній системі
Номер патенту: 300
Опубліковано: 30.04.1993
Автори: Шидловський Анатолій Корнійович, Мостовяк Іван Васильович, Фартушок Ігор Михайлович, Яровий Олександр Миколайович, Новський Володимир Олександрович
Мітки: системі, параметрів, енергії, швидкодіючої, спосіб, стабілізації, багатофазній, електричної
Формула / Реферат:
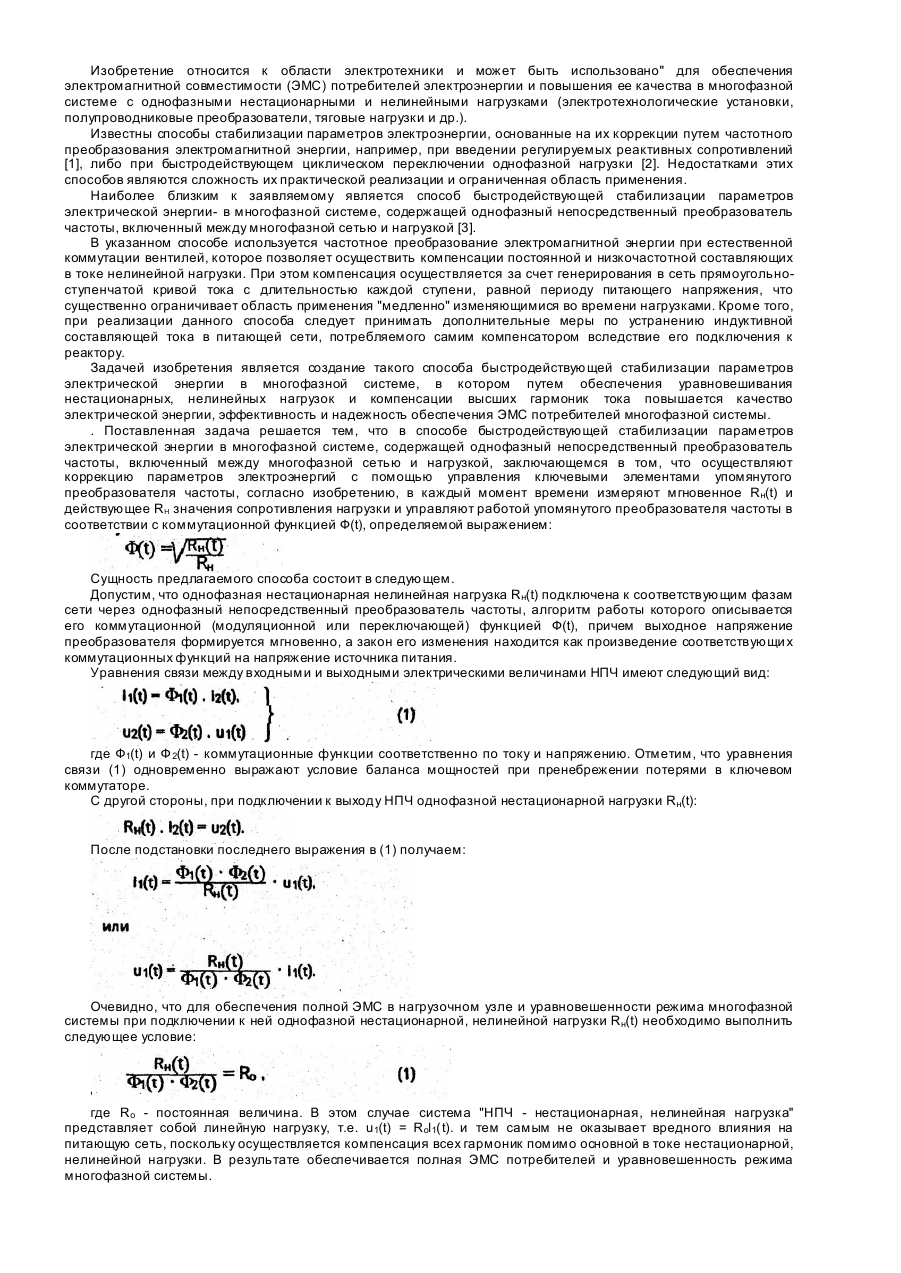
Способ быстродействующей стабилизации параметров электрической энергии а многофазной системе, содержащей однофазный непосредственный преобразователь частоты, включенный между многофазной сетью и нагрузкой, заключающийся в том, что осуществляют коррекцию параметров электроэнергии с помощью управления ключевыми элементами упомяну- . того преобразователя частоты, отличающийся тем, что в каждый момент времени измеряют мгновенное Rн(t) и...
Спосіб стабілізації каротину у трав’яному борошні
Номер патенту: 13633
Опубліковано: 25.04.1997
Автори: Калитка Валентина Василівна, Шкопинський Євген Олексійович, Біллерис Олексій Юрійович
МПК: A23K 1/14
Мітки: стабілізації, трав'яному, борошні, спосіб, каротину
Формула / Реферат:
Способ стабилизации каротина в травяной муке, включающий введение в муку стабилизирующей добавки, отличающийся тем, что, с целью повышения сохранности каротина в травяной муке и снижения затрат, в качестве стабилизирующей добавки используют смесь ионола и лигнина, взятых в соотношении 0,4-0,8 мас.% ионола, лигнин -остальное, полученную добавку вводят в травяную муку в количестве 25-35 кг на 1 т муки.
Пристрій для стабілізації співвідношення натягу рухаючогося матеріалу в зонах багаторухової технологічної лінії
Номер патенту: 11500
Опубліковано: 25.12.1996
Автори: Аркушин Василь Прокопович, Радченко Олексій Леонідович
МПК: B65H 77/00
Мітки: натягу, багаторухової, пристрій, стабілізації, матеріалу, технологічної, рухаючогося, лінії, зонах, співвідношення
Формула / Реферат:
Устройство для стабилизации соотношения натяжения движущегося материала в зонах многодвигательной технологической линии, содержащее регуляторы скорости приводов транспортирующих валиков, датчики натяжения, установленные в зонах технологической линии и связанные с первыми входами соответствующих блоков сравнения, блоки управления приводами, сумматоры и задатчик натяжения, отличающееся тем, что, с целью повышения степени стабилизации...
Попередній патент: Енергетичний засіб сільськогосподарського призначення
Наступний патент: Пристрій для миття резервуара
Випадковий патент: Спосіб отримання відбитка руки та пристрій для його здійснення