Система для автоматичної реєстрації дефектів
Номер патенту: 27171
Опубліковано: 15.08.2000
Автори: Самчинський Анатолій Анатолійович, Смук Ростислав Теодорович, Савенко Сергій Аркадійович
Формула / Реферат
Формула изобретения
Система для автоматической регистрации дефектов, содержащая последовательно соединенные синхронизатор, второй выход которого предназначен для подключения к входу дефектоскопа, измерительный блок, второй вход которого предназначен для подключения к выходу дефектоскопа, блок интерфейса, микропроцессор и запоминающее устройство, выход которого соединен с вторым входом микропроцессора, второй выход которого подключен к второму входу блока интерфейса, и устройство вывода, вход которого подключен к второму выходу блока интерфейса, отличающаяся тем, что, с целью повышения достоверности контроля, она снабжена первым и вторым дешифраторами, элементом ИЛИ, триггером, первым и вторым элементами И и счетчиками поперечной и продольной координат, группа выхода последнего подключена соответственно к первой группе входов интерфейса и входам первого и второго дешифраторов, выходы которых соединены соответственно с первым и вторым входами элемента ИЛИ, выход которого подключен к входу прямого счета счетчика поперечной координаты и тактовому входу триггера, прямой выход которого соединен с первым входом первого элемента И, а инверсный — с информационным входом триггера и первым входом второго элемента И, выходы первого и второго элементов И подключены соответственно к входам прямого и обратного счета счетчика продольной координаты, вторые входы элементов И соединены с вторым выходом синхронизатора, а выходы счетчика поперечной координаты подключены соответственно к второй группе входов блока интерфейса.
Текст
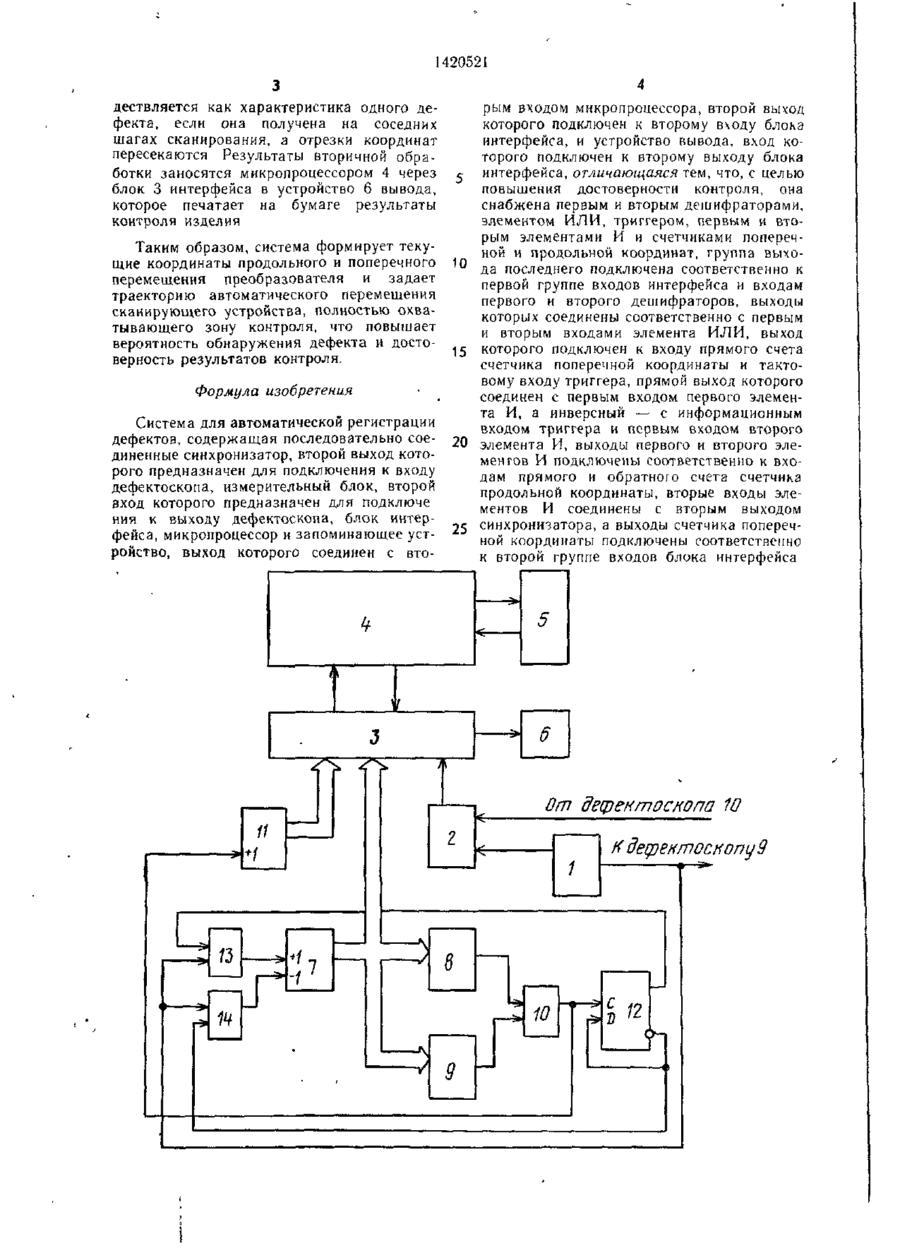
Изобретение относится к неразрушающему контролю и может быть использовано при автоматическом контроле изделий Целью изобретения является повышение достоверности контроля за счет автоматического перемещения сканирующего устройства по изделию, обеспечивающего полный охват зоны контроля Преобразователь сканирующего устройства с шагом АХ движется вдоль зоны контроля По достижении границы зоны происходит его перемещение в поперечном направлении на расстояние AY, после чего движение преобразователя осущесівляетія вдоль -юны контроля в обратном направлении По достижении начальной границы зоны контроля вновь происходит поперечное перемещение преобразователя, и цикл перемещений повторяется Измерение зчо-сигна ла осуществляется в узлах решетки с шагом АХ в продольном и АУ в поперечном на правлениях Параметры эхо-сигнала, опреде ляемые при первичной обработке в иіме рите льном блоке, и текущие координат ь1 сканирования, формируемые в счетчиках продольной и поперечной координат преобразователя, заносятся через блок интерфей са в запоминающее устройство Записанная информация подвергается вторичной обработке, результаты которой передаются в блок вывода результатов 1 и і О СП г і г-. 4 142052! 1 Изобретение относится к технике неразрушающего контроля и может быть использовано при автоматическом контроле изделий. Цель изобретения — повышение достоверности контроля за счет автоматического перемещения сканирующего устройства по изделию, обеспечивающего полный охват зоны контроля На чертеже представлена блок-схема системы для автоматической регистрации дефектов. Система содержит последовательно соединенные синхронизатор 1, второй выход которого предназначен для подключения к входу дефектоскопа, измерительный блок 2, второй вход которого предназначен для подключения к выходу дефектоскопа, блок 3 интерфейса, микропроцессор 4 и запоминающее устройство 5, выход которого соединен с вторым входом микропроцессора 4, второй выход которого подключен к второму входу блока 3 интерфейса, устройство 6 вывода, вход которого подключен к второму выходу блока 3 интерфейса, счетчик 7 продольной координаты, дешифраторы 8 и 9, элемент ИЛИ 10, счетчик 11 поперечной координаты, триггер 12, элементы И 13 и 14, группа выходов счетчика 7 продольной координаты подключена к первой группе входов блока 3 интерфейса и входам дешифраторов 8 и 9, выходы которых соединены соответственно с первым и вторым входами элемента ИЛИ 10, выход которого подключен к входу прямого счета счетчика 11 поперечной координаты и тактовому входу триггера 12, прямой выход которого соединен с первым входом элемента И 13, и инверсный — с информационным входом триггера 12 и первым входом элемента И 14, выходы элементов И 13 и 14 подключены соответственно к входам прямого и обратного счета счетчика 7 продольной координаты, вторые входы элементов И соединены с вторым входом синхронизатора 1, а выходы счетчика 11 поперечной координаты подключены соответственно ко второй группе входов блока 3 интерфейса. Система работает следующим образом. Преобразователь сканирующего устройства помещают в начало прямоугольной зоны контроля с продольными и поперечными размерами А и В, соответственно (на чертеже не показано). В исходном состоянии счетчики, триггер и микропроцессор обнулены. Сигнал сброса поступает на 5-вход триггера 12. По сигналу от синхронизатора 1 сканирующее устройство перемещается вдоль зоны контроля на расстояние зондирующего импульса в дефектоскопе (на чертеже не показан) и измерительный блок 2. Сигналы с второго выхода синхронизатора 1 поступают также через элемент И 13 5 на вход прямого счета счетчика 7 продольной координаты, на выходе которого формируется координата продольного перемещения сканирующего устройства, которая может иметь максимальное значение N. Как только количество перемещений вдоль зоны конт10 роля достигнет числа N, сканирующее устройство перемещается на расстояние AY= = & поперек зоны контроля. Одновремен,с 20 jr 30 35 45 50 jjr, где N — максимальное количество шагов перемещений сканирующего уст- 55 ройства вдоль зоны кс юля. Одновременно синхронизатор 1 запускает генератор но с этим срабатывает дешифратор 8 и на его выходе появляется сигнал «1», который изменяет содержимое счетчика 11 поперечной координаты и триггера 12. На инверсном выходе последнего устанавливается сигнал «1», который разрешает прохождение импульсов с второго выхода синхронизатора 1 через элемент И 14, на вход обратного счета счетчика 7 продольной координаты, на прямом выходе триггера 12 устанавливается сигнал «0», который запрещает прохождениє импульсов от синхронизатора 1 через элемент И 13 на вход прямого счета счетчика 7 продольной координаты. Далее по каждому импульсу от синхронизатора I сканирующее устройство перемещается с дискретностью ДХ к нулевой координате продольного перемещения, а значение счетчика 7 продольной координаты уменьшается на единицу. Как только значение счетчика 7 становится равным нулю, срабатывает дешифратор 9. На выходе последнего появляется сигнал, который, пройдя через элемент ИЛИ 10, увеличивает значение координаты поперечного перемещения на единицу в счетчике И, а сигналы на выходе триггера 12 меняет на противоположные, которые, в свою очередь, устанавливают счетчик 7 продольной координаты в режим прямого счета. При прохождении преобразователя над дефектом на вход измерительного блока 2 с выхода дефектоскопа поступает информация об амплитуде эхо-сигнала и глубине залегания дефекта. Эта информация в нем преобразуется в цифровую форму и подвергается первичной обработке с целью получения начала максимального значения и конца пачки эхо-импульсов. Эта информация сохраняется в памяти измерительного блока и по запросу микропроцессора 4 через блок 3 интерфейса поступает в запоминающее устройство 5. При повторном появлении пачки эхо-сигналов микропроцессор 4 осуществляет вторичную обработку, отождествляя новую информацию с параметрами эхо-сигналов, записанными ранее в запоминающее устройство 5. Информация об эхо-сигнале, полученная на разных сканированиях, отож 1420521 дествляется как характеристика одного дефекта, если она получена на соседних шагах сканирования, а отрезки координат пересекаются Результаты вторичной обработки заносятся микропроцессором 4 через блок 3 интерфейса в устройство б вывода, которое печатает на бумаге результаты контроля изделия Таким образом, система формирует текущие координаты продольного и поперечного перемещения преобразователя и задает траекторию автоматического перемещения сканирующего устройства, полностью охватывающего зону контроля, что повышает вероятность обнаружения дефекта и достоверность результатов контроля. 10 15 Формула изобретения Система для автоматической регистрации дефектов, содержащая последовательно соединенные синхронизатор, второй выход которого предназначен для подключения к входу дефектоскопа, измерительный блок, второй вход которого предназначен для подключе ния к выходу дефектоскопа, блок интерфейса, микропроцессор и запоминающее устройство, выход которого соединен с вто 20 25 рым входом микропроцессора, второй выход которого подключен к второму входу блока интерфейса, и устройство вывода, вход которого подключен к второму выходу блока интерфейса, отличающаяся тем, что, с целью повышения достоверности контроля, она снабжена первым и вторым дешифраторами, элементом ИЛИ, триггером, первым и вторым элементами И и счетчиками поперечной и продольной координат, группа выхода последнего подключена соответственно к первой группе входов интерфейса и входам первого и второго дешифраторов, выходы которых соединены соответственно с первым и вторым входами элемента ИЛИ, выход которого подключен к входу прямого счета счетчика поперечной координаты и тактовому входу триггера, прямой выход которого соединен с первым входом, первого элемента И, а инверсный — с информационным входом триггера и первым входом второго элемента И, выходы первого и второго элементов И подключены соответственно к входам прямого и обратного счета счетчика продольной координаты, вторые входы элементов И соединены с вторым выходом синхронизатора, а выходы счетчика поперечной координаты подключены соответственно к второй группе входов блока интерфейса 5 Огп десренглоснола 10 11 К дефеитоснопу 9 8 10 д 12 1420521 СоставительЕ Ильичев Редактор Л Пчолинская Техред И Верес Корректор Н Король Заказ 4325/50 Тираж 847 Подписное 1 ВНИИПИ Го с " фственного комитета СССР го делам изобретений и открытии і )35 Москва, Ж—35, Раушская наб, д 4/5 Производственно полиграфическое предприятие г Ужгород, >JI Проектная 4
ДивитисяДодаткова інформація
Автори англійськоюSmuk Rostyslav Teodorovych
Автори російськоюСмук Ростислав Теодорович
МПК / Мітки
Мітки: система, реєстрації, дефектів, автоматичної
Код посилання
<a href="https://ua.patents.su/4-27171-sistema-dlya-avtomatichno-reehstraci-defektiv.html" target="_blank" rel="follow" title="База патентів України">Система для автоматичної реєстрації дефектів</a>
Багатоканальний сигнатурний аналізатор

Номер патенту: 6922
Опубліковано: 31.03.1995
Автори: Дяченко Олег Миколайович, Журавель Олександр Павлович
МПК: G06F 11/00
Мітки: сигнатурний, багатоканальний, аналізатор
Текст:
...о е д и н е н с п р я м ы м выходом последнего разряда первого счетчика, инверсный выход последнего разряда которого соединен со вторым входом элемента ИЛИ и с тактовым входом первого триггера, инверсный выход которого соединен с первым выходом третьего элемента И, второй вход которого соединен с выходом элемента ИЛИ, выход третьего элемента И соединен с тактовым входом второго триггера, вторым входом первого элемента И и входом элемента...
Пристрій для реєстрації роботи коксової батареї
Номер патенту: 10993
Опубліковано: 25.12.1996
Автори: Баланов Віктор Григорович, Сладков Вадим Якович
МПК: C10B 41/00
Мітки: реєстрації, роботи, коксової, пристрій, батареї
Формула / Реферат:
1. Устройство для регистрации работы коксовой батареи, содержащее датчики положения коксовыталкивателя, датчик подачи выталкивающей штанги в коксовую печь и датчик тока электропривода выталкивающей штанги, соединенные с блоком определения максимального тока, блок передачи команд, вход которого соединен с блоком определения максимального тока, а выход - с датчиками положения коксовыталкивателя, отличающееся тем, что оно снабжено датчиком...
Лічильник з довільним коефіцієнтом лічби
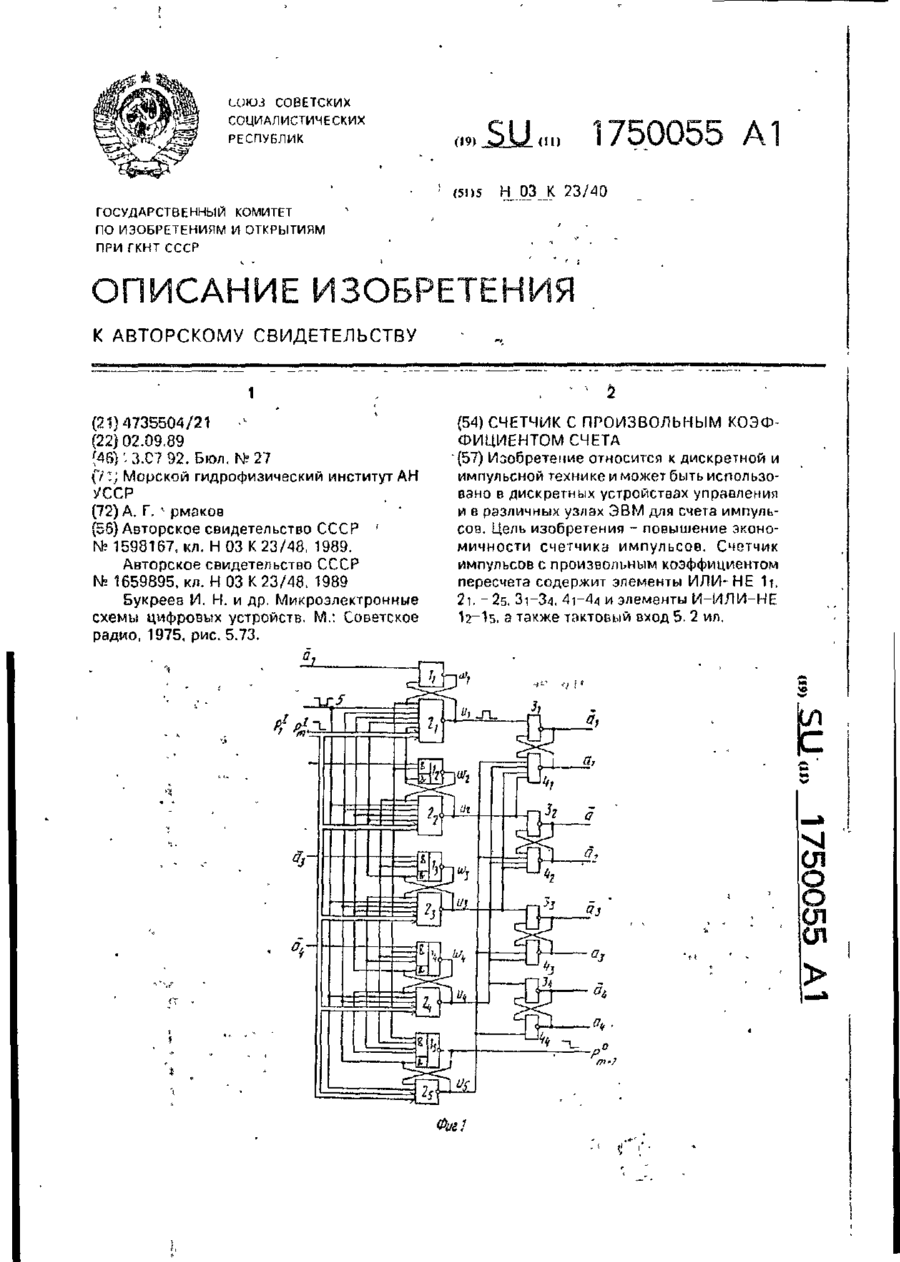
Номер патенту: 16829
Опубліковано: 29.08.1997
Автор: Єрмаков Олександр Григорович
МПК: H03K 23/00
Мітки: лічильник, лічби, довільним, коефіцієнтом
Формула / Реферат:
Счетчик с произвольным коэффициентом счета K=dn+1 dn... d1 = 1 +dn+1 dη...d1(2n-1< k £2n), содержащий n элементов И-ИЛИ-НЕ, причем выход j-го (j = ) элемента И-ИЛИ-НЕ соединен с (j+1)-M входом первой группы И р-го (р = ) элемента И-ИЛИ-НЕ, отличающийся тем, что, с целью повышения...
Цифроаналогова система для реєстрації та обробки інформації
Номер патенту: 15502
Опубліковано: 30.06.1997
Автори: Сапожникова Софа Лейзерівна, Серебряников Юрій Леонідович, Грешищев Юрій Михайлович, Урсатьєв Олексій Андрійович
Мітки: цифроаналогова, система, обробки, реєстрації, інформації
Формула / Реферат:
(57) 1. Цифроаналоговая система для регистрации и обработки информации, содержащая блок программной перестройки структуры, блок вывода, выход которого является выходом системы, и микроЭВМ, отличающаяся тем, что блок программной перестройки структуры содержит мультиплексор и демультиплексор, первый выход которого является первым выходом блока программной перестройки структуры, первый и второй информационные входы которого подключены...
Лічильник електроенергії
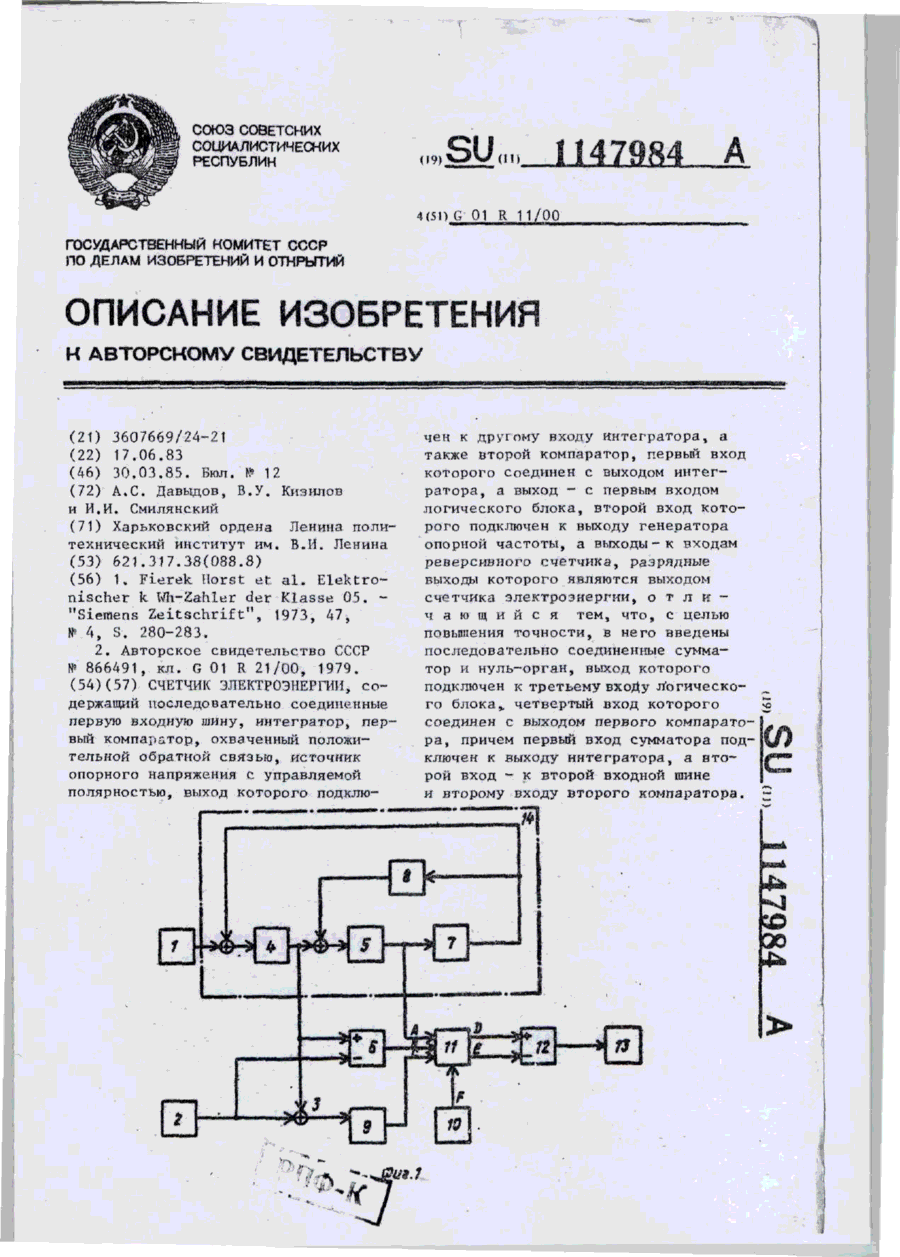
Номер патенту: 1742
Опубліковано: 25.10.1994
Автори: Смілянський Ігор Ісаакович, Давидов Анатолій Семенович, Кизилов Володимир Улянович
МПК: G01R 11/00
Мітки: електроенергії, лічильник
Формула / Реферат:
Счетчик электроэнергии, содержащий последовательно соединенные первую входную шину, интегратор, первый компаратор, охваченный положительной обратной связью, источник опорного напряжения с управляемой полярностью, выход которого подключен к другому входу интегратора, а также второй компаратор, первый вход которого соединен с выходом интегратора, а выход — с первым входом логического блока, второй вход которого подключен к выходу генератора...
Попередній патент: Імпульсний пристрій з псевдозрідженим шаром, імпульсний реактор з псевдозрідженим шаром та спосіб спалювання твердого палива
Наступний патент: Шифратор
Випадковий патент: Спосіб одержання біологічно активної суміші