Застосування пасивного автобалансира як демпфера кута нутації сплюснутого обертового космічного апарата
Номер патенту: 28407
Опубліковано: 10.12.2007
Автори: Філімоніхіна Ірина Іванівна, Філімоніхін Геннадій Борисович
Формула / Реферат
1. Застосування пасивного автобалансира як демпфера кута нутації сплюснутого обертового космічного апарата.
2. Застосування за п. 1, яке відрізняється тим, що космічний апарат статично незрівноважений, відстань від центра мас космічного апарата до площини корекції не перевищує
![]()
де:
b - відстань від центра мас космічного апарата до площини статичного дисбалансу,
А, В - екваторіальні,
С - повздовжній головні центральні осьові моменти інерції космічного апарата,
МΣ - його маса.
3. Застосування за п. 2, яке відрізняється тим, що площина корекції пасивного автобалансира суміщена із площиною статичного дисбалансу космічного апарата.
4. Застосування за пп. 1-3, яке відрізняється тим, що пасивний автобалансир є класичним.
5. Застосування за п. 4, яке відрізняється тим, що пасивний автобалансир є кульовим або роликовим, або маятниковим, або кільцевим.
6. Застосування за пп. 1-3, яке відрізняється тим, що пасивний автобалансир є некласичним.
7. Застосування за п. 6, яке відрізняється тим, що коригувальні вантажі пасивного автобалансира обертаються навколо поперечних осей космічного апарата або повздовжньої і поперечної осей космічного апарата, або двох осей, які не є повздовжніми відносно космічного апарата, або здійснюють сферичний рух навколо точки на повздовжній осі космічного апарата.
Текст
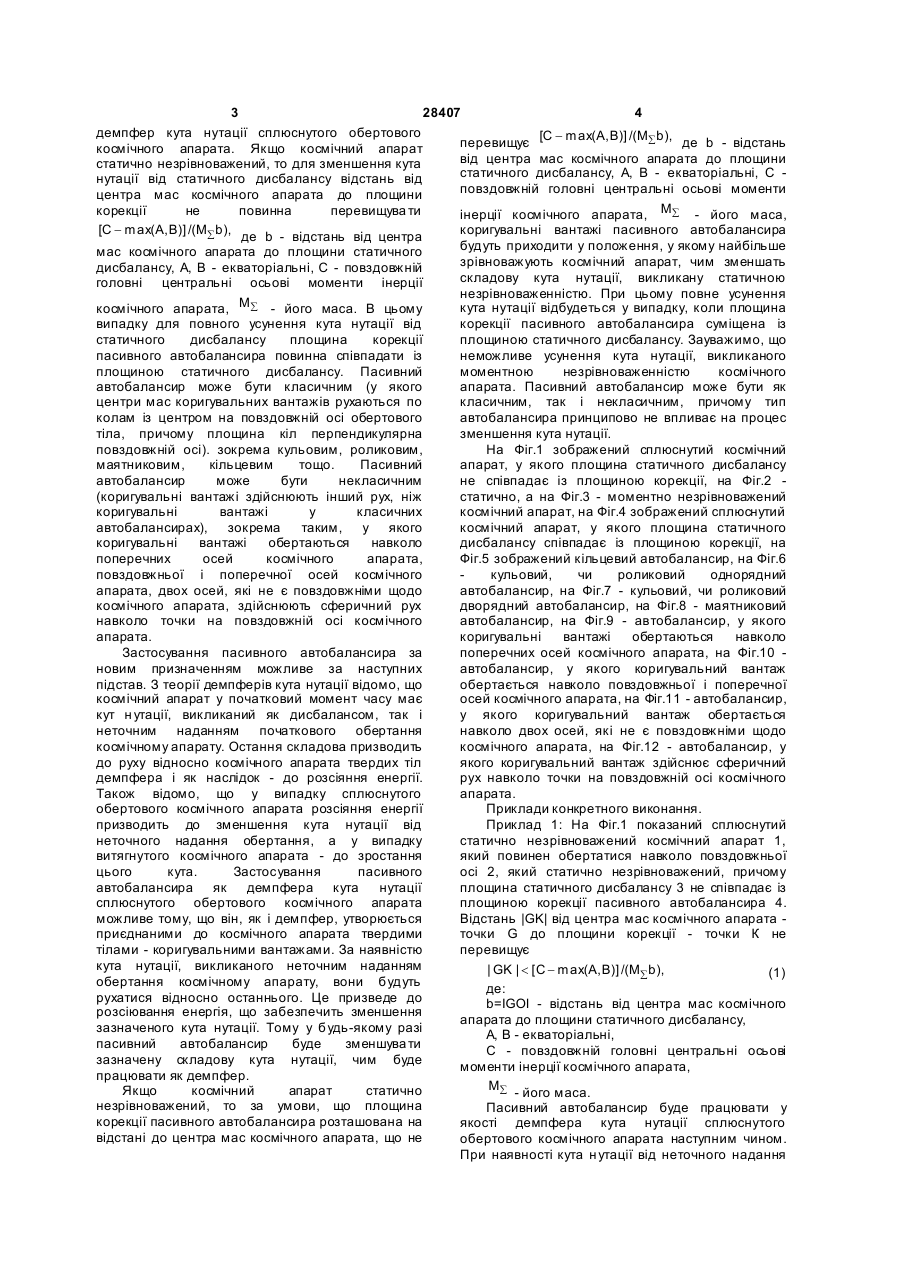
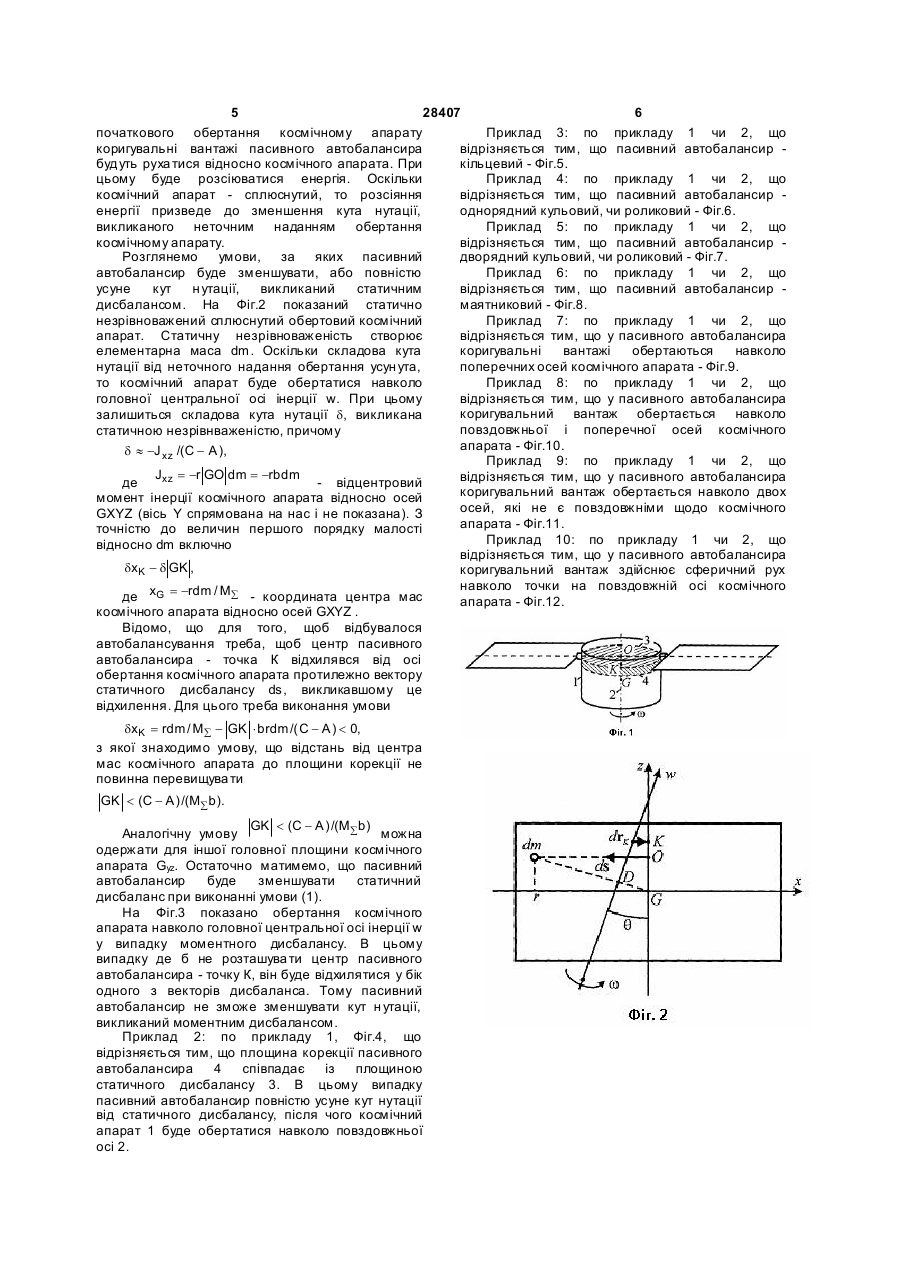
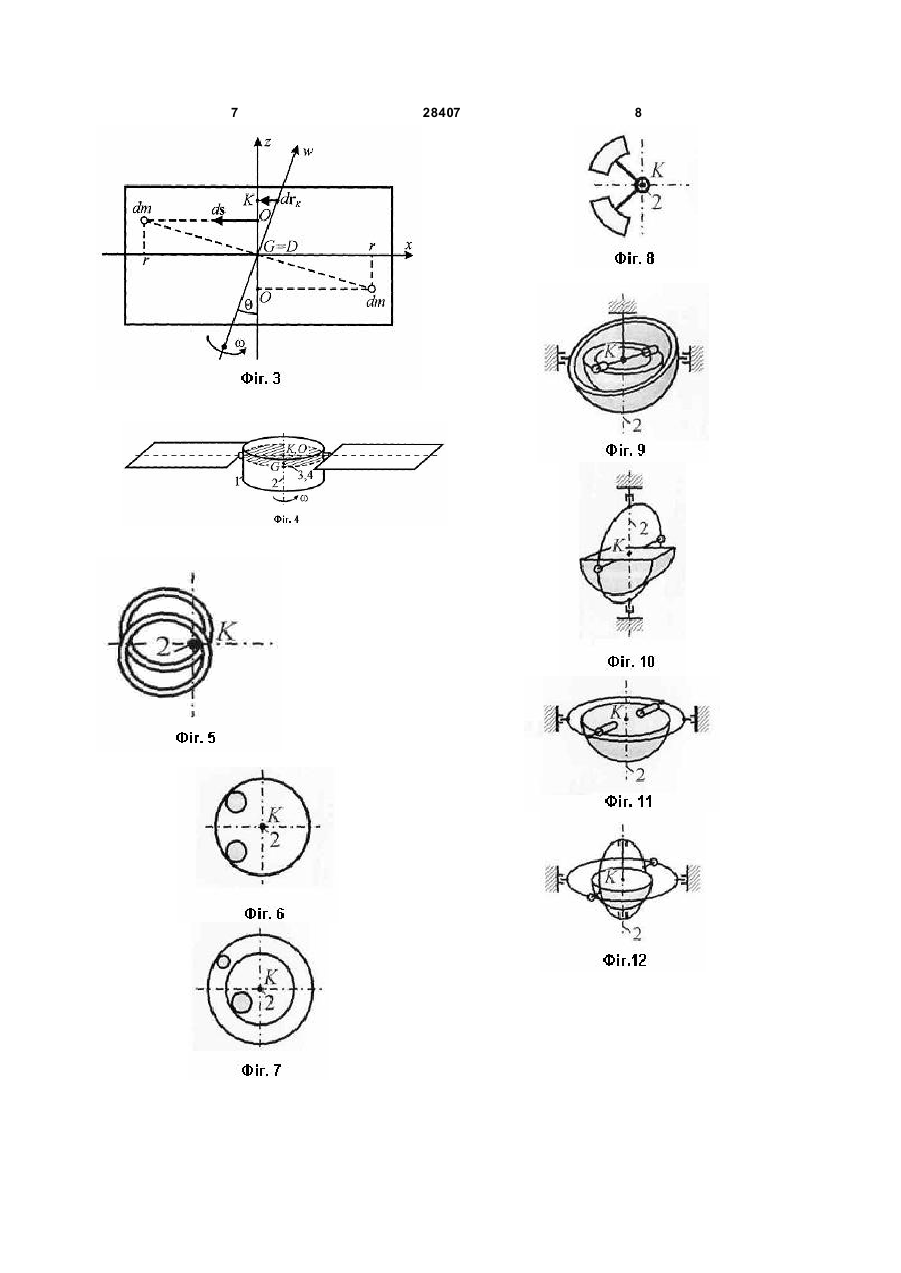
1. Застосування пасивного автобалансира як демпфера кута нутації сплюснутого обертового космічного апарата. 2. Застосування за п. 1, яке відрізняється тим, що космічний апарат статично незрівноважений, відстань від центра мас космічного апарата до площини корекції не перевищує [C - max(A, B)] /(M åb) , де: b - відстань від центра мас космічного апарата до площини статичного дисбалансу, А, В - екваторіальні, U 2 (19) 1 3 28407 4 демпфер кута нутації сплюснутого обертового перевищує [C - max(A, B)] /(Måb), де b - відстань космічного апарата. Якщо космічний апарат від центра мас космічного апарата до площини статично незрівноважений, то для зменшення кута статичного дисбалансу, А, В - екваторіальні, С нутації від статичного дисбалансу відстань від повздовжній головні центральні осьові моменти центра мас космічного апарата до площини корекції не повинна перевищува ти інерції космічного апарата, Må - його маса, [C - max(A, B)] /(Måb), де b - відстань від центра коригувальні вантажі пасивного автобалансира будуть приходити у положення, у якому найбільше мас космічного апарата до площини статичного зрівноважують космічний апарат, чим зменшать дисбалансу, А, В - екваторіальні, С - повздовжній складову кута нутації, викликану статичною головні центральні осьові моменти інерції незрівноваженністю. При цьому повне усунення кута нутації відбудеться у випадку, коли площина космічного апарата, Må - його маса. В цьому випадку для повного усунення кута нутації від корекції пасивного автобалансира суміщена із статичного дисбалансу площина корекції площиною статичного дисбалансу. Зауважимо, що пасивного автобалансира повинна співпадати із неможливе усунення кута нутації, викликаного площиною статичного дисбалансу. Пасивний моментною незрівноваженністю космічного автобалансир може бути класичним (у якого апарата. Пасивний автобалансир може бути як центри мас коригувальних вантажів рухаються по класичним, так і некласичним, причому тип колам із центром на повздовжній осі обертового автобалансира принципово не впливає на процес тіла, причому площина кіл перпендикулярна зменшення кута нутації. повздовжній осі). зокрема кульовим, роликовим, На Фіг.1 зображений сплюснутий космічний маятниковим, кільцевим тощо. Пасивний апарат, у якого площина статичного дисбалансу автобалансир може бути некласичним не співпадає із площиною корекції, на Фіг.2 (коригувальні вантажі здійснюють інший рух, ніж статично, а на Фіг.3 - моментно незрівноважений коригувальні вантажі у класичних космічний апарат, на Фіг.4 зображений сплюснутий автобалансирах), зокрема таким, у якого космічний апарат, у якого площина статичного коригувальні вантажі обертаються навколо дисбалансу співпадає із площиною корекції, на поперечних осей космічного апарата, Фіг.5 зображений кільцевий автобалансир, на Фіг.6 повздовжньої і поперечної осей космічного кульовий, чи роликовий однорядний апарата, двох осей, які не є повздовжніми щодо автобалансир, на Фіг.7 - кульовий, чи роликовий космічного апарата, здійснюють сферичний рух дворядний автобалансир, на Фіг.8 - маятниковий навколо точки на повздовжній осі космічного автобалансир, на Фіг.9 - автобалансир, у якого апарата. коригувальні вантажі обертаються навколо Застосування пасивного автобалансира за поперечних осей космічного апарата, на Фіг.10 новим призначенням можливе за наступних автобалансир, у якого коригувальний вантаж підстав. З теорії демпферів кута нутації відомо, що обертається навколо повздовжньої і поперечної космічний апарат у початковий момент часу має осей космічного апарата, на Фіг.11 - автобалансир, кут н утації, викликаний як дисбалансом, так і у якого коригувальний вантаж обертається неточним наданням початкового обертання навколо двох осей, які не є повздовжніми щодо космічному апарату. Остання складова призводить космічного апарата, на Фіг.12 - автобалансир, у до руху відносно космічного апарата твердих тіл якого коригувальний вантаж здійснює сферичний демпфера і як наслідок - до розсіяння енергії. рух навколо точки на повздовжній осі космічного Також відомо, що у випадку сплюснутого апарата. обертового космічного апарата розсіяння енергії Приклади конкретного виконання. призводить до зменшення кута нутації від Приклад 1: На Фіг.1 показаний сплюснутий неточного надання обертання, а у випадку статично незрівноважений космічний апарат 1, витягнутого космічного апарата - до зростання який повинен обертатися навколо повздовжньої цього кута. Застосування пасивного осі 2, який статично незрівноважений, причому автобалансира як демпфера кута нутації площина статичного дисбалансу 3 не співпадає із сплюснутого обертового космічного апарата площиною корекції пасивного автобалансира 4. можливе тому, що він, як і демпфер, утворюється Відстань |GK| від центра мас космічного апарата приєднаними до космічного апарата твердими точки G до площини корекції - точки К не тілами - коригувальними вантажами. За наявністю перевищує кута нутації, викликаного неточним наданням | GK | < [ C - max(A, B)] /(Måb), (1) обертання космічному апарату, вони будуть де: рухатися відносно останнього. Це призведе до b=IGOI - відстань від центра мас космічного розсіювання енергія, що забезпечить зменшення апарата до площини статичного дисбалансу, зазначеного кута нутації. Тому у будь-якому разі А, В - екваторіальні, пасивний автобалансир буде зменшува ти С - повздовжній головні центральні осьові зазначену складову кута нутації, чим буде моменти інерції космічного апарата, працювати як демпфер. Må - його маса. Якщо космічний апарат статично незрівноважений, то за умови, що площина Пасивний автобалансир буде працювати у корекції пасивного автобалансира розташована на якості демпфера кута нутації сплюснутого відстані до центра мас космічного апарата, що не обертового космічного апарата наступним чином. При наявності кута н утації від неточного надання 5 28407 6 початкового обертання космічному апарату Приклад 3: по прикладу 1 чи 2, що коригувальні вантажі пасивного автобалансира відрізняється тим, що пасивний автобалансир будуть руха тися відносно космічного апарата. При кільцевий - Фіг.5. цьому буде розсіюватися енергія. Оскільки Приклад 4: по прикладу 1 чи 2, що космічний апарат - сплюснутий, то розсіяння відрізняється тим, що пасивний автобалансир енергії призведе до зменшення кута нутації, однорядний кульовий, чи роликовий - Фіг.6. викликаного неточним наданням обертання Приклад 5: по прикладу 1 чи 2, що космічному апарату. відрізняється тим, що пасивний автобалансир Розглянемо умови, за яких пасивний дворядний кульовий, чи роликовий - Фіг.7. автобалансир буде зменшувати, або повністю Приклад 6: по прикладу 1 чи 2, що усуне кут н утації, викликаний статичним відрізняється тим, що пасивний автобалансир дисбалансом. На Фіг.2 показаний статично маятниковий - Фіг.8. незрівноважений сплюснутий обертовий космічний Приклад 7: по прикладу 1 чи 2, що апарат. Статичну незрівноваженість створює відрізняється тим, що у пасивного автобалансира елементарна маса dm. Оскільки складова кута коригувальні вантажі обертаються навколо нутації від неточного надання обертання усун ута, поперечних осей космічного апарата - Фіг.9. то космічний апарат буде обертатися навколо Приклад 8: по прикладу 1 чи 2, що головної центральної осі інерції w. При цьому відрізняється тим, що у пасивного автобалансира коригувальний вантаж обертається навколо залишиться складова кута нутації d, викликана повздовжньої і поперечної осей космічного статичною незрівнваженістю, причому апарата - Фіг.10. d » -J xz /(C - A ), Приклад 9: по прикладу 1 чи 2, що Jxz = -r GO dm = -rbdm відрізняється тим, що у пасивного автобалансира де - відцентровий коригувальний вантаж обертається навколо двох момент інерції космічного апарата відносно осей осей, які не є повздовжніми щодо космічного GXYZ (вісь Y спрямована на нас і не показана). З апарата - Фіг.11. точністю до величин першого порядку малості Приклад 10: по прикладу 1 чи 2, що відносно dm включно відрізняється тим, що у пасивного автобалансира dxK - d GK , коригувальний вантаж здійснює сферичний рух навколо точки на повздовжній осі космічного xG = -rdm / Må - координата центра мас де апарата - Фіг.12. космічного апарата відносно осей GXYZ . Відомо, що для того, щоб відбувалося автобалансування треба, щоб центр пасивного автобалансира - точка К відхилявся від осі обертання космічного апарата протилежно вектору статичного дисбалансу ds, викликавшому це відхилення. Для цього треба виконання умови dxK = rdm / Må - GK × brdm /( C - А ) < 0, з якої знаходимо умову, що відстань від центра мас космічного апарата до площини корекції не повинна перевищува ти GK < (C - A ) /(Måb). GK < (C - A ) /(Måb) Аналогічну умову можна одержати для іншої головної площини космічного апарата Gyz. Остаточно матимемо, що пасивний автобалансир буде зменшувати статичний дисбаланс при виконанні умови (1). На Фіг.3 показано обертання космічного апарата навколо головної центральної осі інерції w у випадку моментного дисбалансу. В цьому випадку де б не розташува ти центр пасивного автобалансира - точку К, він буде відхилятися у бік одного з векторів дисбаланса. Тому пасивний автобалансир не зможе зменшувати кут н утації, викликаний моментним дисбалансом. Приклад 2: по прикладу 1, Фіг.4, що відрізняється тим, що площина корекції пасивного автобалансира 4 співпадає із площиною статичного дисбалансу 3. В цьому випадку пасивний автобалансир повністю усуне кут нутації від статичного дисбалансу, після чого космічний апарат 1 буде обертатися навколо повздовжньої осі 2. 7 28407 8
ДивитисяДодаткова інформація
Назва патенту англійськоюUse of passive self-balancing device as damper of nutation angle of oblate rotating automatic space vehicle
Автори англійськоюFilimonikhina Iryna Ivanivna, Filimonikhin Hennadiy Borysovych
Назва патенту російськоюИспользование пассивного автобалансира в качестве демпфера угла нутации сплюснутого вращающегося космического аппарата
Автори російськоюФилимонихина Ирина Ивановна, Филимонихин Геннадий Борисович
МПК / Мітки
МПК: B64G 1/00
Мітки: сплюснутого, демпфера, обертового, нутації, космічного, автобалансира, пасивного, застосування, кута, апарата
Код посилання
<a href="https://ua.patents.su/4-28407-zastosuvannya-pasivnogo-avtobalansira-yak-dempfera-kuta-nutaci-splyusnutogo-obertovogo-kosmichnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Застосування пасивного автобалансира як демпфера кута нутації сплюснутого обертового космічного апарата</a>
Спосіб нейтралізації електростатичного заряду поверхні космічного апарата та його частин
Номер патенту: 73462
Опубліковано: 15.07.2005
Автор: Хитько Андрій Володимирович
МПК: F03H 1/00
Мітки: електростатичного, поверхні, заряду, нейтралізації, космічного, апарата, частин, спосіб
Формула / Реферат:
Спосіб нейтралізації електростатичного заряду поверхні космічного апарата та його часток, що включає перенесення електростатичного заряду у кулонах, який відрізняється тим, що перенесення електростатичного заряду здійснюють по стаціонарному мосту квазінейтральної плазми, який утворюють між космічним апаратом і плазмою космічного простору або між окремими електрично ізольованими одна від одної частками космічного апарата.
Спосіб розвантаження системи силових гіроскопів космічного апарата
Номер патенту: 62147
Опубліковано: 15.12.2003
Автори: Бандура Іван Миколайович, Успенський Валерій Борисович, Голоскоков Євген Григорович, Кузнєцов Юрій Олексійович
МПК: B64G 1/24
Мітки: гіроскопів, космічного, системі, розвантаження, спосіб, силових, апарата
Формула / Реферат:
Спосіб розвантаження системи силових гіроскопів космічного апарата, який полягає в тому, що вимірюють вектор нагромадженого кінетичного моменту системи силових гіроскопів, вимірюють вектор абсолютної кутової швидкості космічного апарата, визначають сумарний вектор кінетичного моменту космічного апарата, виконують розвантаження за допомогою реактивних двигунів орієнтації, який відрізняється тим, що фіксують момент досягнення допустимого...
Спосіб гасіння початкових кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 80583
Опубліковано: 10.10.2007
Автори: Бандура Іван Миколайович, Кулік Анатолій Степанович, Чебераха Ольга Анатоліївна
МПК: B64G 1/24
Мітки: спосіб, кутових, вісесиметричного, швидкостей, космічного, апарата, літального, гасіння, початкових
Формула / Реферат:
Спосіб гасіння початкових кутових швидкостей вісесиметричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, включають керуючі реактивні двигуни, який відрізняється тим, що для гасіння складових кутової швидкості обертання навколо двох осей забезпечують паузу без керування, для гасіння подовжньої кутової швидкості й однієї з поперечних кутових...
Спосіб активного відмовостійкого управління орієнтацією космічного апарата
Номер патенту: 11671
Опубліковано: 16.01.2006
Автори: Мирна Олена Володимирівна, Пархоменко Юлія Анатоліївна, Гавриленко Олег Іванович, Лученко Олег Олексійович
МПК: B64G 1/28
Мітки: апарата, управління, орієнтацією, відмовостійкого, активного, спосіб, космічного
Формула / Реферат:
Спосіб активного відмовостійкого управління орієнтацією космічного апарата, що включає вимірювання кутового відхилення орієнтованої осі космічного апарата від потрібного напряму, визначення моментів часу, у які вимірюване кутове відхилення приймає екстремальні значення, змінювання моменту інерції космічного апарата в моменти часу, що відповідають відповідним екстремальним значенням кутового відхилення та значенням кутового відхилення, що...
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 11858
Опубліковано: 16.01.2006
Автори: Войченко Оксана Олександрівна, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: демпфірування, спосіб, апарата, космічного, вісесиметричного, літального, кутових, швидкостей
Формула / Реферат:
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, включають керуючі реактивні двигуни, який відрізняється тим, що для демпфірування складових кутової швидкості обертання навколо трьох осей забезпечують паузу без керування, для демпфірування подовжньої кутової швидкості визначають момент початку...
Попередній патент: Машинка для стриження тварин
Наступний патент: Спосіб виконання промірних робіт
Випадковий патент: Спосіб виробництва екологічної панелі із пресованої соломи