Індукційний апарат
Номер патенту: 31770
Опубліковано: 25.04.2008
Автори: Попков Володимир Сергійович, Шуляк Володимир Миколайович, Богаєнко Микола Володимирович, Орлов Ігор Іванович
Формула / Реферат
Індукційний апарат, що містить індукторну систему з вихровим магнітним полем, робочу камеру з немагнітного матеріалу, феромагнітні робочі тіла, які розміщені в активній зоні і взаємодіють з вихровим полем індукторної системи, який відрізняється тим, що робоча камера усередині поза активною зоною має одну чи ряд перегородок з наскрізними отворами, в центрі яких консольно защемлено, як мінімум один, пружний елемент, на вільному кінці якого жорстко змонтовані робочі тіла, при цьому подовжні осі робочих тіл зорієнтовані переважно перпендикулярно до подовжньої осі робочої камери.
Текст
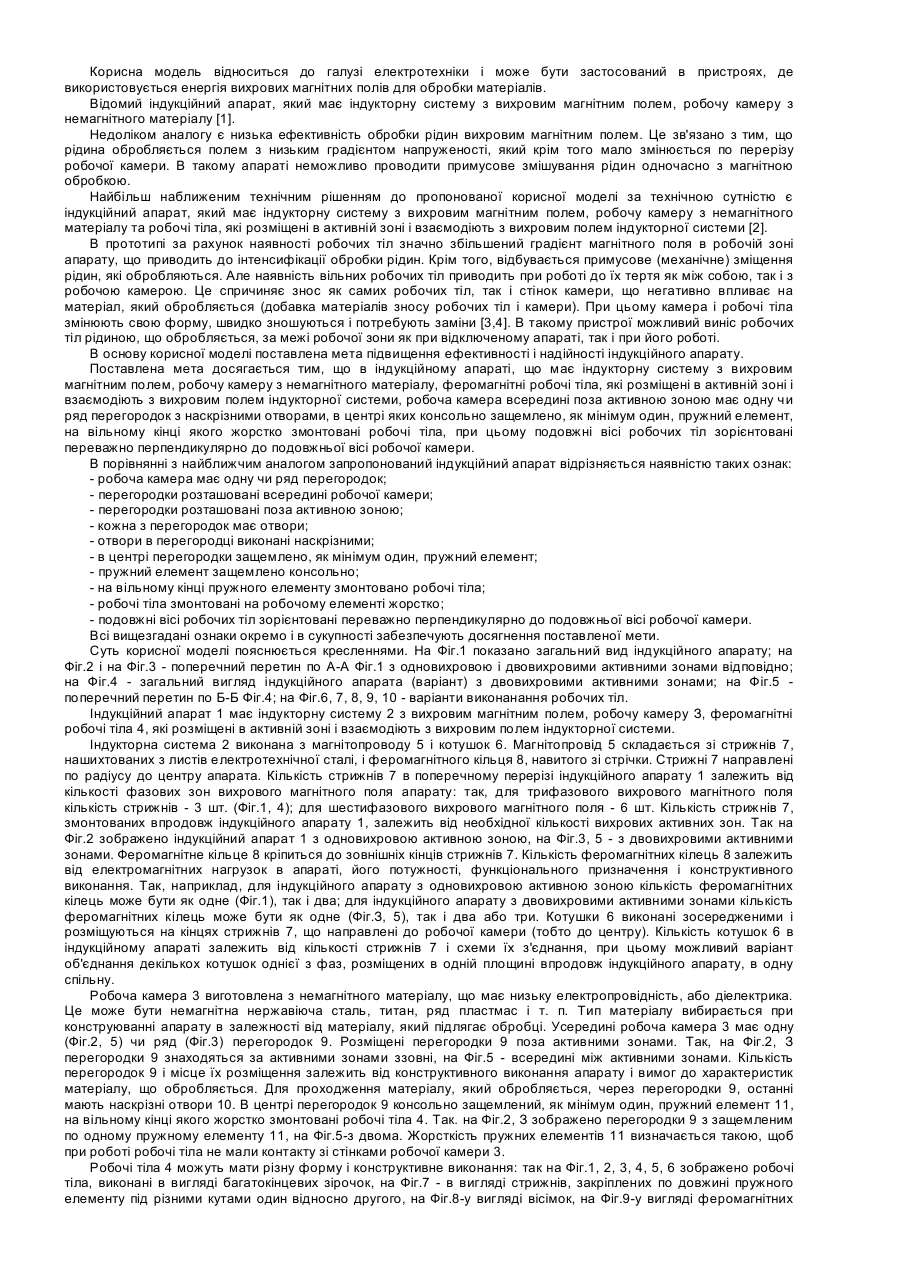
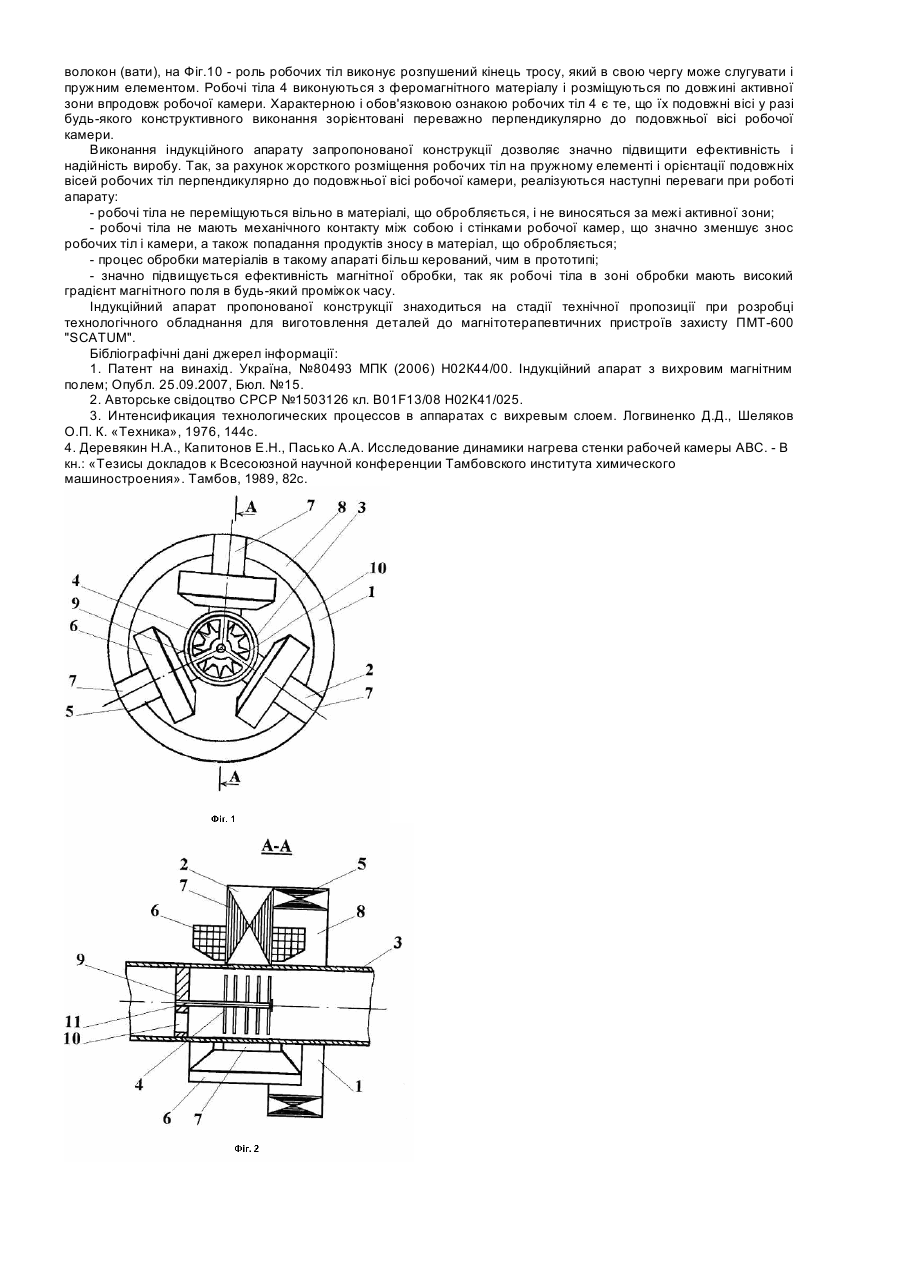
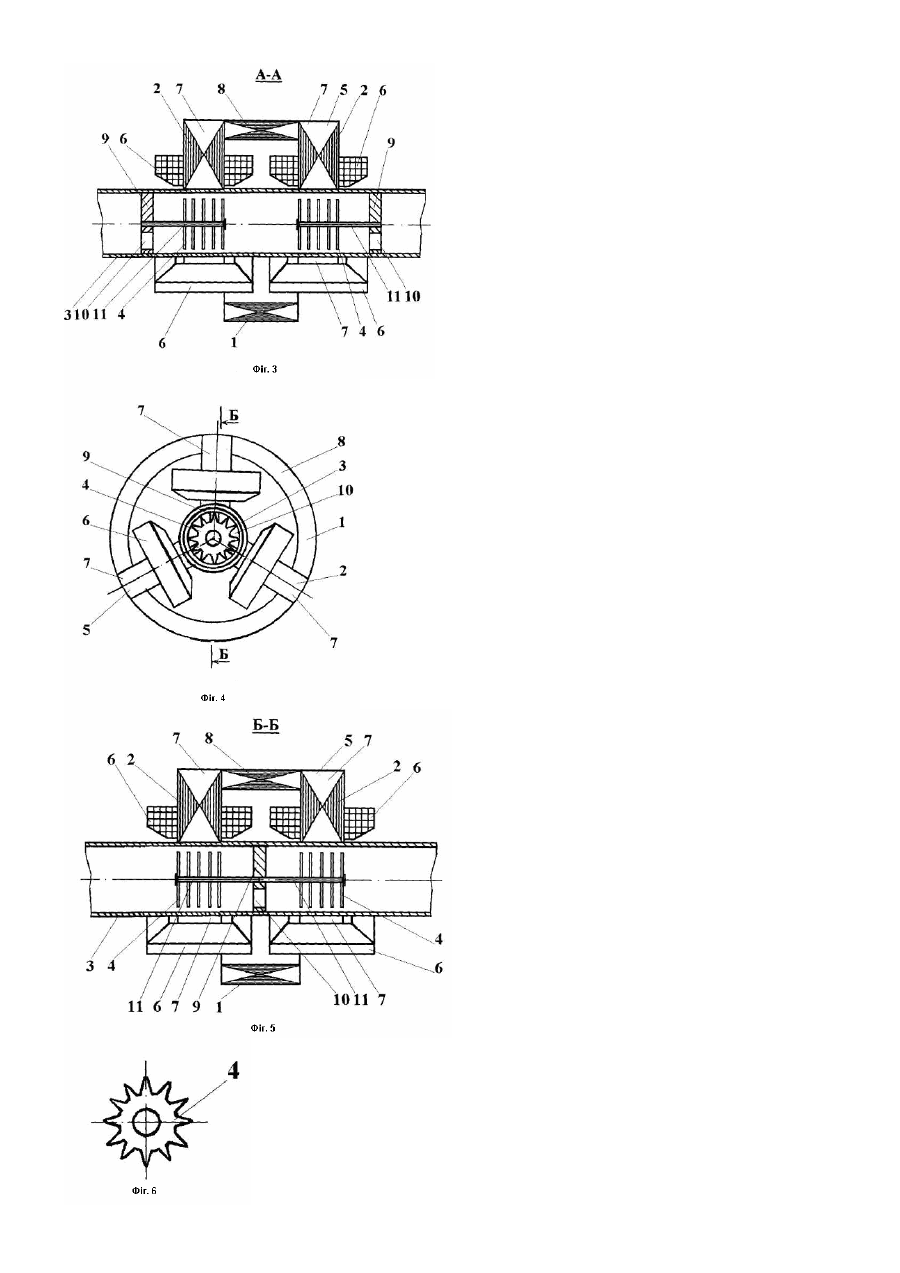
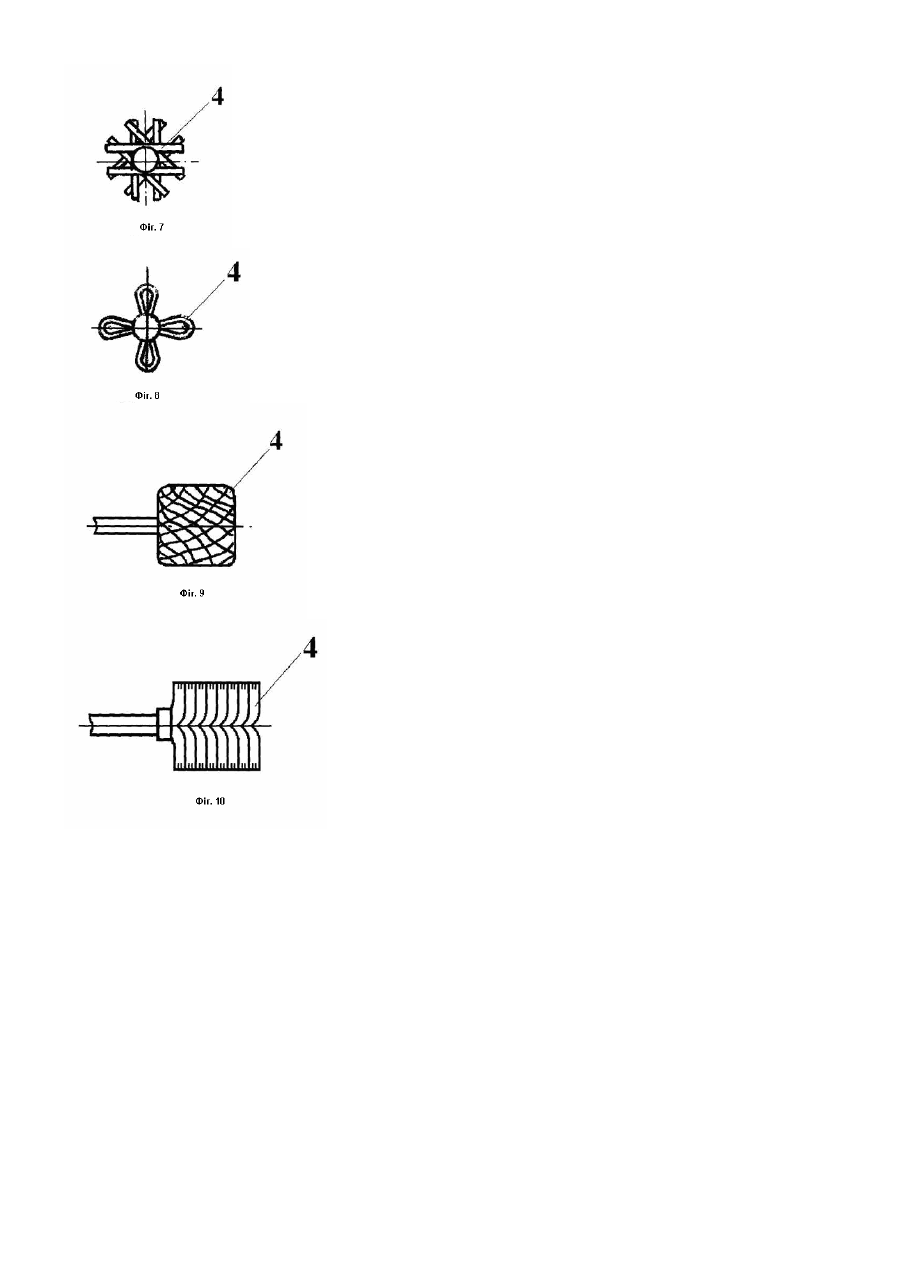
Корисна модель відноситься до галузі електротехніки і може бути застосований в пристроях, де використовується енергія вихрових магнітних полів для обробки матеріалів. Відомий індукційний апарат, який має індукторну систему з вихровим магнітним полем, робочу камеру з немагнітного матеріалу [1]. Недоліком аналогу є низька ефективність обробки рідин вихровим магнітним полем. Це зв'язано з тим, що рідина обробляється полем з низьким градієнтом напруженості, який крім того мало змінюється по перерізу робочої камери. В такому апараті неможливо проводити примусове змішування рідин одночасно з магнітною обробкою. Найбільш наближеним технічним рішенням до пропонованої корисної моделі за технічною сутністю є індукційний апарат, який має індукторну систему з вихровим магнітним полем, робочу камеру з немагнітного матеріалу та робочі тіла, які розміщені в активній зоні і взаємодіють з вихровим полем індукторної системи [2]. В прототипі за рахунок наявності робочих тіл значно збільшений градієнт магнітного поля в робочій зоні апарату, що приводить до інтенсифікації обробки рідин. Крім того, відбувається примусове (механічне) зміщення рідин, які обробляються. Але наявність вільних робочих тіл приводить при роботі до їх тертя як між собою, так і з робочою камерою. Це спричиняє знос як самих робочих тіл, так і стінок камери, що негативно впливає на матеріал, який обробляється (добавка матеріалів зносу робочих тіл і камери). При цьому камера і робочі тіла змінюють свою форму, швидко зношуються і потребують заміни [3,4]. В такому пристрої можливий виніс робочих тіл рідиною, що обробляється, за межі робочої зони як при відключеному апараті, так і при його роботі. В основу корисної моделі поставлена мета підвищення ефективності і надійності індукційного апарату. Поставлена мета досягається тим, що в індукційному апараті, що має індукторну систему з вихровим магнітним полем, робочу камеру з немагнітного матеріалу, феромагнітні робочі тіла, які розміщені в активній зоні і взаємодіють з вихровим полем індукторної системи, робоча камера всередині поза активною зоною має одну чи ряд перегородок з наскрізними отворами, в центрі яких консольно защемлено, як мінімум один, пружний елемент, на вільному кінці якого жорстко змонтовані робочі тіла, при цьому подовжні вісі робочих тіл зорієнтовані переважно перпендикулярно до подовжньої вісі робочої камери. В порівнянні з найближчим аналогом запропонований індукційний апарат відрізняється наявністю таких ознак: - робоча камера має одну чи ряд перегородок; - перегородки розташовані всередині робочої камери; - перегородки розташовані поза активною зоною; - кожна з перегородок має отвори; - отвори в перегородці виконані наскрізними; - в центрі перегородки защемлено, як мінімум один, пружний елемент; - пружний елемент защемлено консольно; - на вільному кінці пружного елементу змонтовано робочі тіла; - робочі тіла змонтовані на робочому елементі жорстко; - подовжні вісі робочих тіл зорієнтовані переважно перпендикулярно до подовжньої вісі робочої камери. Всі вищезгадані ознаки окремо і в сукупності забезпечують досягнення поставленої мети. Суть корисної моделі пояснюється кресленнями. На Фіг.1 показано загальний вид індукційного апарату; на Фіг.2 і на Фіг.3 - поперечний перетин по А-А Фіг.1 з одновихровою і двовихровими активними зонами відповідно; на Фіг.4 - загальний вигляд індукційного апарата (варіант) з двовихровими активними зонами; на Фіг.5 поперечний перетин по Б-Б Фіг.4; на Фіг.6, 7, 8, 9, 10 - варіанти виконанання робочих тіл. Індукційний апарат 1 має індукторну систему 2 з вихровим магнітним полем, робочу камеру З, феромагнітні робочі тіла 4, які розміщені в активній зоні і взаємодіють з вихровим полем індукторної системи. Індукторна система 2 виконана з магнітопроводу 5 і котушок 6. Магнітопровід 5 складається зі стрижнів 7, нашихтованих з листів електротехнічної сталі, і феромагнітного кільця 8, навитого зі стрічки. Стрижні 7 направлені по радіусу до центру апарата. Кількість стрижнів 7 в поперечному перерізі індукційного апарату 1 залежить від кількості фазових зон вихрового магнітного поля апарату: так, для трифазового вихрового магнітного поля кількість стрижнів - 3 шт. (Фіг.1, 4); для шестифазового вихрового магнітного поля - 6 шт. Кількість стрижнів 7, змонтованих впродовж індукційного апарату 1, залежить від необхідної кількості вихрових активних зон. Так на Фіг.2 зображено індукційний апарат 1 з одновихровою активною зоною, на Фіг.3, 5 - з двовихровими активними зонами. Феромагнітне кільце 8 кріпиться до зовнішніх кінців стрижнів 7. Кількість феромагнітних кілець 8 залежить від електромагнітних нагрузок в апараті, його потужності, функціонального призначення і конструктивного виконання. Так, наприклад, для індукційного апарату з одновихровою активною зоною кількість феромагнітних кілець може бути як одне (Фіг.1), так і два; для індукційного апарату з двовихровими активними зонами кількість феромагнітних кілець може бути як одне (Фіг.З, 5), так і два або три. Котушки 6 виконані зосередженими і розміщуються на кінцях стрижнів 7, що направлені до робочої камери (тобто до центру). Кількість котушок 6 в індукційному апараті залежить від кількості стрижнів 7 і схеми їх з'єднання, при цьому можливий варіант об'єднання декількох котушок однієї з фаз, розміщених в одній площині впродовж індукційного апарату, в одну спільну. Робоча камера 3 виготовлена з немагнітного матеріалу, що має низьку електропровідність, або діелектрика. Це може бути немагнітна нержавіюча сталь, титан, ряд пластмас і т. п. Тип матеріалу вибирається при конструюванні апарату в залежності від матеріалу, який підлягає обробці. Усередині робоча камера 3 має одну (Фіг.2, 5) чи ряд (Фіг.3) перегородок 9. Розміщені перегородки 9 поза активними зонами. Так, на Фіг.2, З перегородки 9 знаходяться за активними зонами ззовні, на Фіг.5 - всередині між активними зонами. Кількість перегородок 9 і місце їх розміщення залежить від конструктивного виконання апарату і вимог до характеристик матеріалу, що обробляється. Для проходження матеріалу, який обробляється, через перегородки 9, останні мають наскрізні отвори 10. В центрі перегородок 9 консольно защемлений, як мінімум один, пружний елемент 11, на вільному кінці якого жорстко змонтовані робочі тіла 4. Так. на Фіг.2, З зображено перегородки 9 з защемленим по одному пружному елементу 11, на Фіг.5-з двома. Жорсткість пружних елементів 11 визначається такою, щоб при роботі робочі тіла не мали контакту зі стінками робочої камери 3. Робочі тіла 4 можуть мати різну форму і конструктивне виконання: так на Фіг.1, 2, 3, 4, 5, 6 зображено робочі тіла, виконані в вигляді багатокінцевих зірочок, на Фіг.7 - в вигляді стрижнів, закріплених по довжині пружного елементу під різними кутами один відносно другого, на Фіг.8-у вигляді вісімок, на Фіг.9-у вигляді феромагнітних волокон (вати), на Фіг.10 - роль робочих тіл виконує розпушений кінець тросу, який в свою чергу може слугувати і пружним елементом. Робочі тіла 4 виконуються з феромагнітного матеріалу і розміщуються по довжині активної зони впродовж робочої камери. Характерною і обов'язковою ознакою робочих тіл 4 є те, що їх подовжні вісі у разі будь-якого конструктивного виконання зорієнтовані переважно перпендикулярно до подовжньої вісі робочої камери. Виконання індукційного апарату запропонованої конструкції дозволяє значно підвищити ефективність і надійність виробу. Так, за рахунок жорсткого розміщення робочих тіл на пружному елементі і орієнтації подовжніх вісей робочих тіл перпендикулярно до подовжньої вісі робочої камери, реалізуються наступні переваги при роботі апарату: - робочі тіла не переміщуються вільно в матеріалі, що обробляється, і не виносяться за межі активної зони; - робочі тіла не мають механічного контакту між собою і стінками робочої камер, що значно зменшує знос робочих тіл і камери, а також попадання продуктів зносу в матеріал, що обробляється; - процес обробки матеріалів в такому апараті більш керований, чим в прототипі; - значно підвищується ефективність магнітної обробки, так як робочі тіла в зоні обробки мають високий градієнт магнітного поля в будь-який проміжок часу. Індукційний апарат пропонованої конструкції знаходиться на стадії технічної пропозиції при розробці технологічного обладнання для виготовлення деталей до магнітотерапевтичних пристроїв захисту ПМТ-600 "SCATUM". Бібліографічні дані джерел інформації: 1. Патент на винахід. Україна, №80493 МПК (2006) Н02К44/00. Індукційний апарат з вихровим магнітним полем; Опубл. 25.09.2007, Бюл. №15. 2. Авторське свідоцтво СРСР №1503126 кл. В01F13/08 Н02К41/025. 3. Интенсификация технологических процессов в аппаратах с вихревым слоем. Логвиненко Д.Д., Шеляков О.П. К. «Техника», 1976, 144с. 4. Деревякин Н.А., Капитонов Е.Н., Пасько А.А. Исследование динамики нагрева стенки рабочей камеры ABC. - В кн.: «Тезисы докладов к Всесоюзной научной конференции Тамбовского института химического машиностроения». Тамбов, 1989, 82с.
ДивитисяДодаткова інформація
Назва патенту англійськоюInduction apparatus
Автори англійськоюOrlov Ihor Ivanovych, Shuliak Volodymyr Mykolaiovych, Bohaienko Mykola Volodymyrovych, Popkov Volodymyr Serhiiovych, Popkov Volodymyr Serhiiovychch
Назва патенту російськоюИндукционный аппарат
Автори російськоюОрлов Игорь Иванович, Шуляк Володимир Миколайович, Богаенко Николай Владимирович, Попков Владимир Сергеевич
МПК / Мітки
МПК: H02K 44/00
Мітки: апарат, індукційний
Код посилання
<a href="https://ua.patents.su/4-31770-indukcijjnijj-aparat.html" target="_blank" rel="follow" title="База патентів України">Індукційний апарат</a>
Індукційний апарат з вихровим магнітним полем
Номер патенту: 27399
Опубліковано: 25.10.2007
Автори: Шуляк Володимир Миколайович, Орлов Ігор Іванович, Богаєнко Микола Володимирович, Попков Володимир Сергійович
МПК: H02K 44/00
Мітки: індукційний, апарат, полем, магнітним, вихровим
Формула / Реферат:
Індукційний апарат з вихровим магнітним полем, що має робочу камеру з немагнітного матеріалу, магнітопровід, виконаний в вигляді шихтованих стрижнів, кількість яких в поперечному перерізі робочої камери дорівнює числу фазових зон вихрового магнітного поля, феромагнітні кільця, навиті зі стрічки і примикаючі до кінців стрижнів, протилежних робочій камері, і зосереджені котушки, що змонтовані на стрижнях, який відрізняється тим, що по довжині...
Індукційний апарат з вихровим магнітним полем
Номер патенту: 80493
Опубліковано: 25.09.2007
Автори: Шуляк Володимир Миколайович, Богаєнко Микола Володимирович, Орлов Ігор Іванович, Попков Володимир Сергійович
МПК: H02K 44/00
Мітки: полем, магнітним, вихровим, апарат, індукційний
Формула / Реферат:
Індукційний апарат з вихровим магнітним полем, що має магнітопровід з зосередженими котушками, робочу камеру з немагнітного матеріалу, який відрізняється тим, що робоча камера має радіально розташовані тепловідвідні елементи у вигляді пласких пластин уподовж активного шару, між якими розташовані шихтовані стрижні, кількість яких дорівнює числу фазових зон вихрового магнітного поля, на кінцях, що направлені в бік робочої камери, змонтовані...
Індукційний апарат з вихоровим магнітним полем
Номер патенту: 17066
Опубліковано: 15.09.2006
Автори: Орлов Ігор Іванович, Богаєнко Микола Володимирович, Попков Володимир Сергійович, Шуляк Володимир Миколайович
МПК: H02K 44/00
Мітки: полем, вихоровим, магнітним, апарат, індукційний
Формула / Реферат:
Індукційний апарат з вихоровим магнітним полем, що має магнітопровід з зосередженими котушками, робочу камеру з немагнітного матеріалу, який відрізняється тим, що робоча камера має радіально розташовані тепловідвідні елементи у вигляді пласких пластин вздовж активного шару, між якими розташовані шихтовані стрижні, кількість яких дорівнює числу фазових зон вихорового магнітного поля, на кінцях, що направлені в сторону робочої камери,...
Лінійний індукційний апарат
Номер патенту: 80771
Опубліковано: 25.10.2007
Автори: Попков Володимир Сергійович, Орлов Ігор Іванович, Шуляк Володимир Миколайович, Богаєнко Микола Володимирович
МПК: H02K 44/00, B01F 5/06
Мітки: апарат, лінійний, індукційний
Формула / Реферат:
Лінійний індукційний апарат, що містить індуктори з обмотками, між якими встановлена робоча камера з заокругленими боковими стінками, в якій розміщені феромагнітні робочі частки, який відрізняється тим, що робоча камера має знімну торцеву стінку, яка є кришкою завантажувального вікна і виконана подвійною, зовнішня стінка має форму і розміри торця камери і закріплена до нього через ущільнювальні елементи за допомогою фігурних скоб, а...
Лінійний індукційний апарат
Номер патенту: 15734
Опубліковано: 17.07.2006
Автори: Попков Володимир Сергійович, Орлов Ігор Іванович, Шуляк Володимир Миколайович, Богаєнко Микола Володимирович
МПК: B01F 5/06, H02K 44/00
Мітки: лінійний, апарат, індукційний
Формула / Реферат:
Лінійний індукційний апарат, що містить індуктори з обмотками, між якими встановлена камера з заокругленими боковими стінками, в якій розміщені феромагнітні робочі частинки, який відрізняється тим, що робоча камера містить знімну торцеву стінку, яка є кришкою завантажувального вікна, виконану подвійною, зовнішня стінка має форму і розміри торця камери і кріпиться до нього через ущільнюючі елементи за допомогою фігурних скоб, а внутрішня, до...
Попередній патент: Спосіб переробки металовмісних відходів
Наступний патент: Різьбове з`єднання
Випадковий патент: Пристрій для гасіння стабілізованого полум'я в газовій магістралі