Адаптивний пристрій для вимірювального контролю несинхронності обертання роторів силових електричних машин
Номер патенту: 31827
Опубліковано: 25.04.2008
Автори: Васілевський Олександр Миколайович, Кравець Олег Миколайович
Формула / Реферат
Адаптивний пристрій для вимірювального контролю несинхронності обертання роторів силових електричних машин, який складається з двох частотних регуляторів, двох силових електричних машин, двох датчиків кутової швидкості, задавача частот обертання силових електричних машин, суматора та блока обробки інформації, один з входів якого з'єднано з виходом першого датчика кутової швидкості, а вхід першого датчика кутової швидкості з'єднано з виходом першої силової електричної машини, вхід якої з'єднано з виходом першого частотного регулятора, а вхід першого частотного регулятора з'єднано з виходом задавача кутової швидкості, інший вхід блока обробки інформації з'єднано з виходом другого датчика кутової швидкості, а вхід другого датчика кутової швидкості з'єднано з виходом другої силової електричної машини, вхід якої з'єднано з виходом другого частотного регулятора, вхід другого частотного регулятора з'єднано з виходом суматора, а входи суматора відповідно з'єднані з виходом задавача кутової швидкості та виходом блока обробки інформації, який відрізняється тим, що в нього введено блок спостережного засобу ідентифікації, який складається з трьох суматорів, трьох блоків множення, двох інтеграторів, блока масштабного перетворення, блока логічної одиниці та блока ділення, причому входи другого суматора з'єднано з виходами блоків електричної частини першої та другої електричної машини, а вихід другого суматора з'єднано із першими входами першого та другого блока множення, вихід першого блока множення з'єднано з першим входом третього суматора, вихід якого з'єднано з входом першого інтегратора, вихід першого інтегратора з'єднано з одним із входів четвертого суматора, інший вхід четвертого суматора з'єднано з виходом блока обробки інформації, а вихід четвертого суматора з'єднано з входом блока масштабного перетворення та другим входом другого блока множення, вихід блока масштабного перетворення з'єднано з другим входом третього суматора, а вихід другого блока множення з'єднано з входом другого інтегратора, вихід якого з’єднано з другим входом першого блока множення та першим входом блока ділення, другий вхід блока ділення з'єднано з блоком логічної одиниці, вихід блока ділення з'єднано з першим входом третього блока множення, другий вхід третього блока множення з'єднано з виходом другого частотного регулятора, а вихід третього блока множення з'єднано з входом блока електричної частини другої електричної машини.
Текст
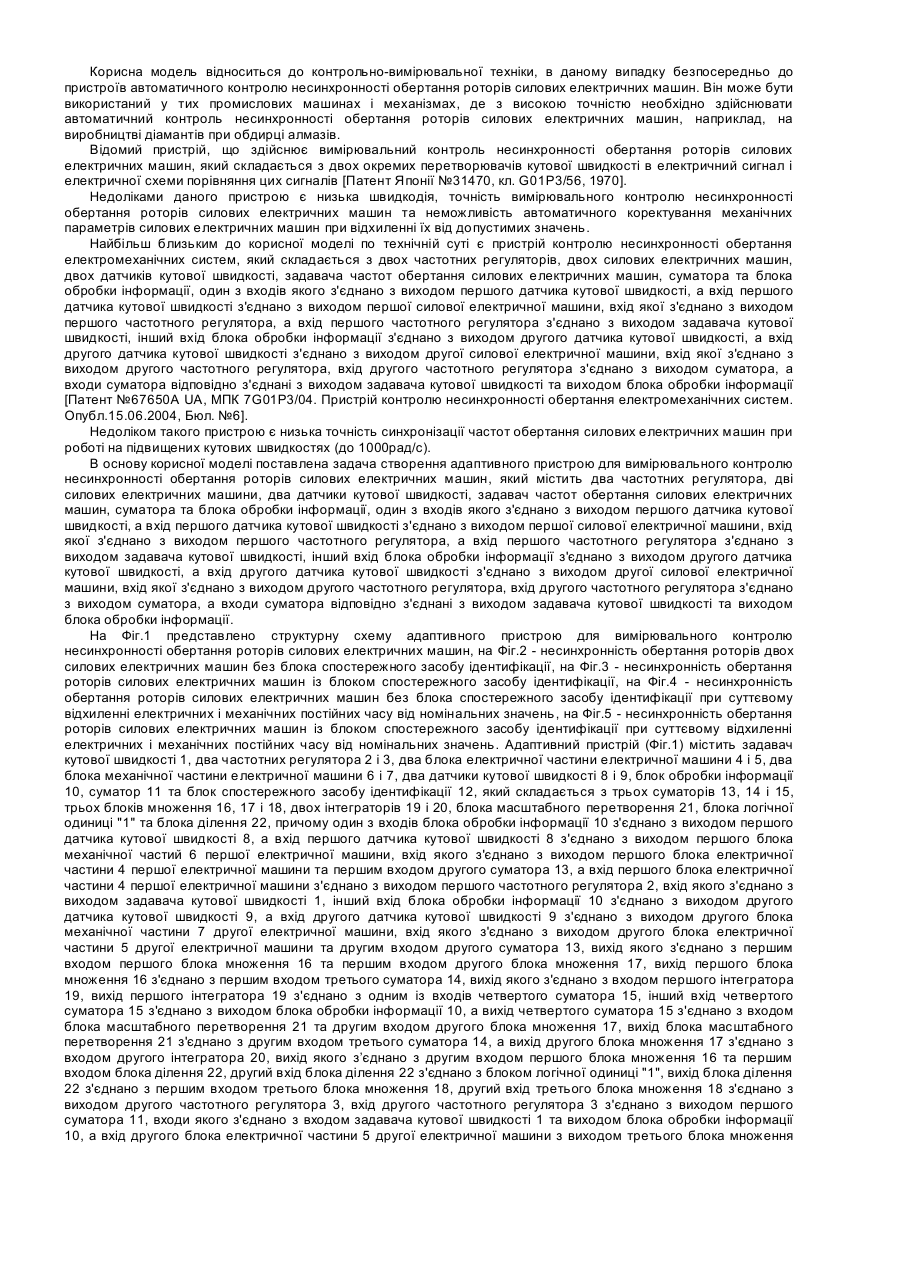
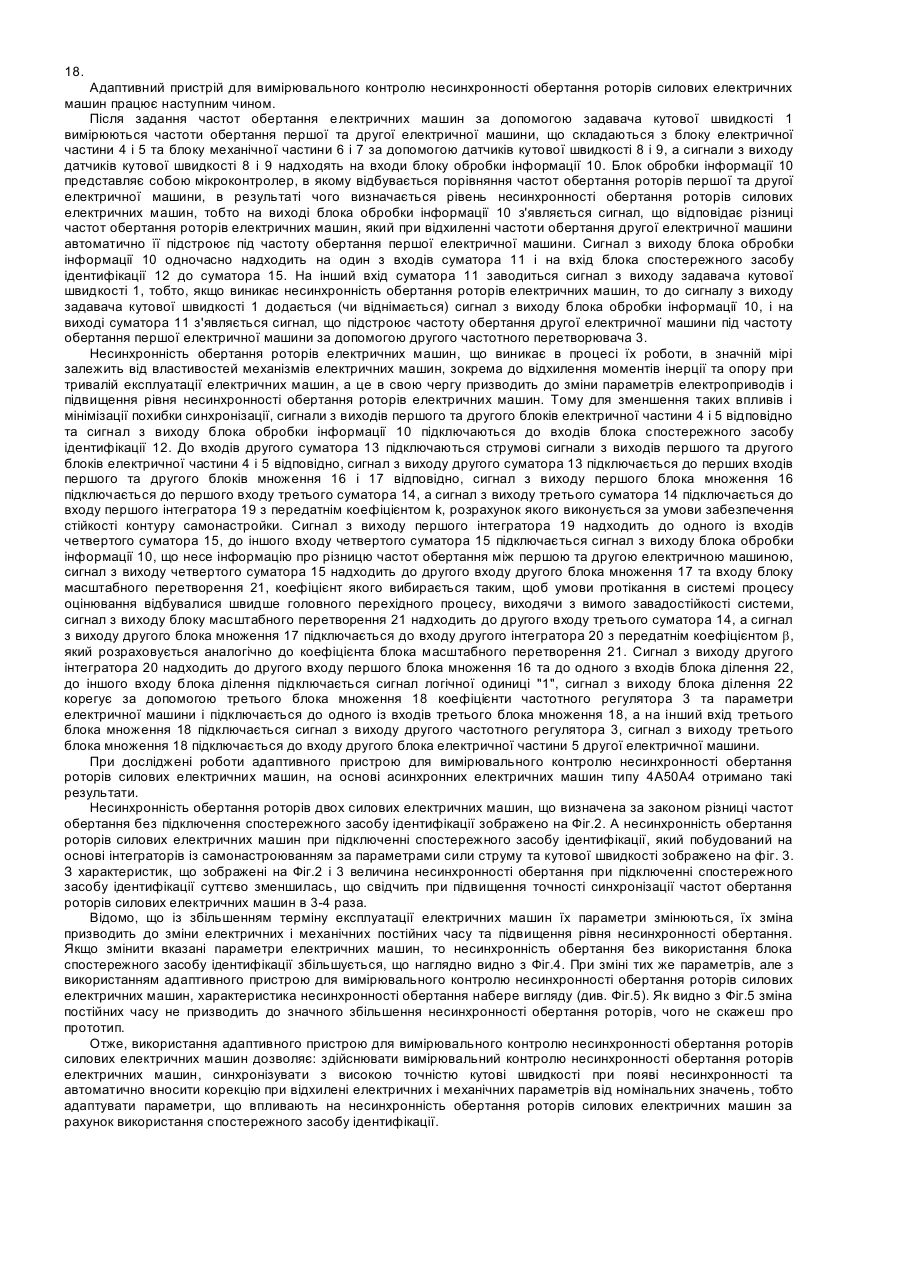
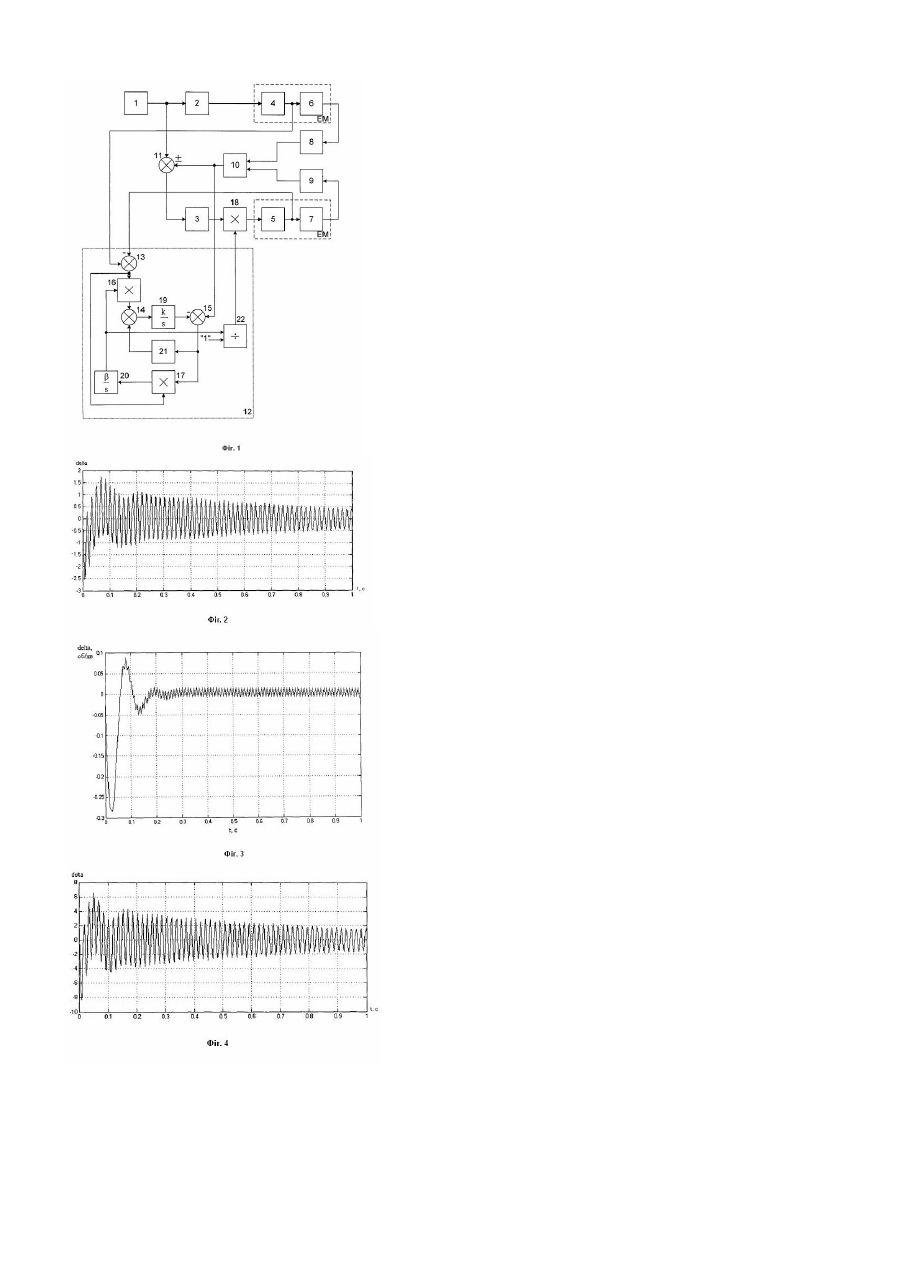
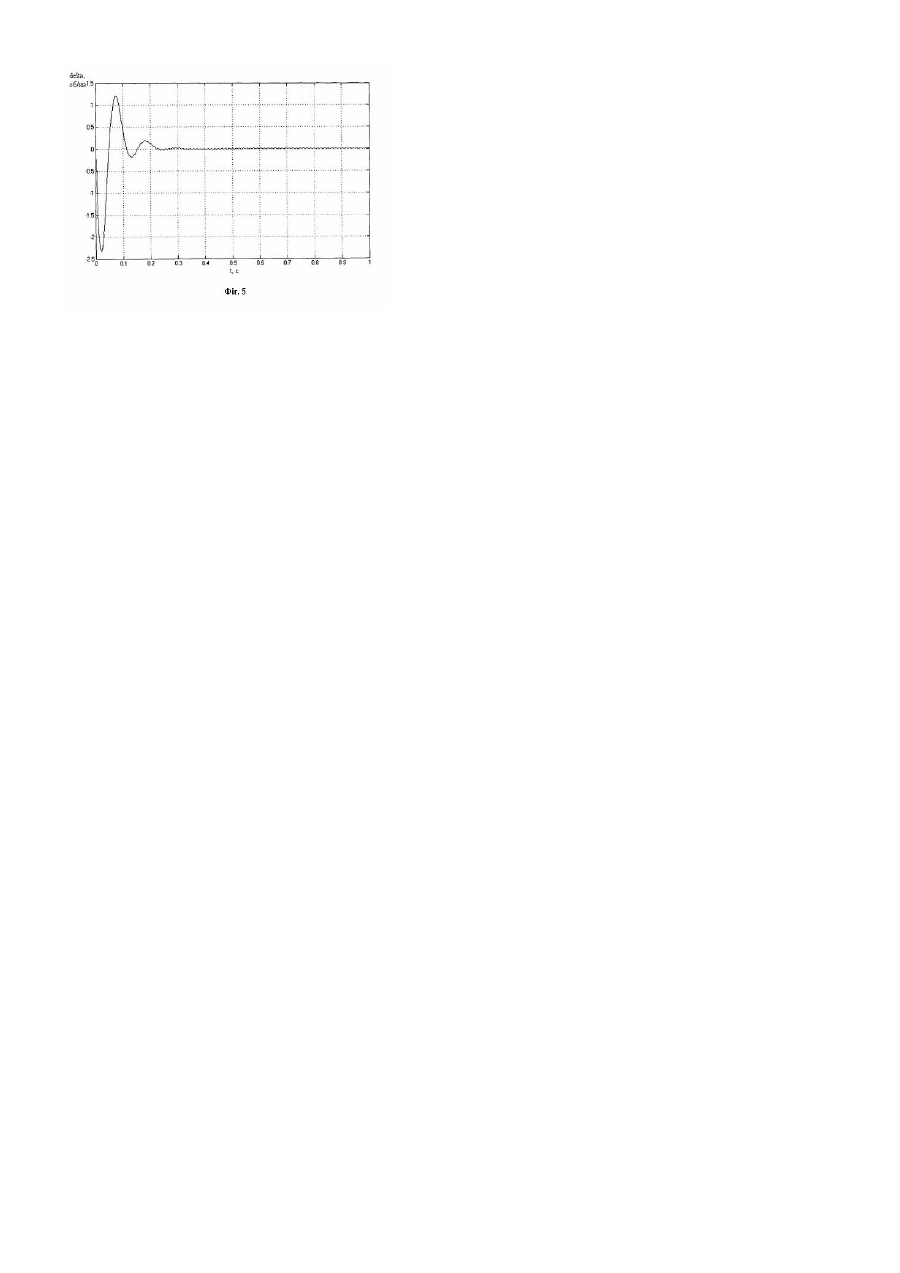
Корисна модель відноситься до контрольно-вимірювальної техніки, в даному випадку безпосередньо до пристроїв автоматичного контролю несинхронності обертання роторів силових електричних машин. Він може бути використаний у тих промислових машинах і механізмах, де з високою точністю необхідно здійснювати автоматичний контроль несинхронності обертання роторів силових електричних машин, наприклад, на виробництві діамантів при обдирці алмазів. Відомий пристрій, що здійснює вимірювальний контроль несинхронності обертання роторів силових електричних машин, який складається з двох окремих перетворювачів кутової швидкості в електричний сигнал і електричної схеми порівняння цих сигналів [Патент Японії №31470, кл. G01P3/56, 1970]. Недоліками даного пристрою є низька швидкодія, точність вимірювального контролю несинхронності обертання роторів силових електричних машин та неможливість автоматичного коректування механічних параметрів силових електричних машин при відхиленні їх від допустимих значень. Найбільш близьким до корисної моделі по технічній суті є пристрій контролю несинхронності обертання електромеханічних систем, який складається з двох частотних регуляторів, двох силових електричних машин, двох датчиків кутової швидкості, задавача частот обертання силових електричних машин, суматора та блока обробки інформації, один з входів якого з'єднано з виходом першого датчика кутової швидкості, а вхід першого датчика кутової швидкості з'єднано з виходом першої силової електричної машини, вхід якої з'єднано з виходом першого частотного регулятора, а вхід першого частотного регулятора з'єднано з виходом задавача кутової швидкості, інший вхід блока обробки інформації з'єднано з виходом другого датчика кутової швидкості, а вхід другого датчика кутової швидкості з'єднано з виходом другої силової електричної машини, вхід якої з'єднано з виходом другого частотного регулятора, вхід другого частотного регулятора з'єднано з виходом суматора, а входи суматора відповідно з'єднані з виходом задавача кутової швидкості та виходом блока обробки інформації [Патент №67650А UA, МПК 7G01P3/04. Пристрій контролю несинхронності обертання електромеханічних систем. Опубл.15.06.2004, Бюл. №6]. Недоліком такого пристрою є низька точність синхронізації частот обертання силових електричних машин при роботі на підвищених кутових швидкостях (до 1000рад/с). В основу корисної моделі поставлена задача створення адаптивного пристрою для вимірювального контролю несинхронності обертання роторів силових електричних машин, який містить два частотних регулятора, дві силових електричних машини, два датчики кутової швидкості, задавач частот обертання силових електричних машин, суматора та блока обробки інформації, один з входів якого з'єднано з виходом першого датчика кутової швидкості, а вхід першого датчика кутової швидкості з'єднано з виходом першої силової електричної машини, вхід якої з'єднано з виходом першого частотного регулятора, а вхід першого частотного регулятора з'єднано з виходом задавача кутової швидкості, інший вхід блока обробки інформації з'єднано з виходом другого датчика кутової швидкості, а вхід другого датчика кутової швидкості з'єднано з виходом другої силової електричної машини, вхід якої з'єднано з виходом другого частотного регулятора, вхід другого частотного регулятора з'єднано з виходом суматора, а входи суматора відповідно з'єднані з виходом задавача кутової швидкості та виходом блока обробки інформації. На Фіг.1 представлено структурну схему адаптивного пристрою для вимірювального контролю несинхронності обертання роторів силових електричних машин, на Фіг.2 - несинхронність обертання роторів двох силових електричних машин без блока спостережного засобу ідентифікації, на Фіг.3 - несинхронність обертання роторів силових електричних машин із блоком спостережного засобу ідентифікації, на Фіг.4 - несинхронність обертання роторів силових електричних машин без блока спостережного засобу ідентифікації при суттєвому відхиленні електричних і механічних постійних часу від номінальних значень, на Фіг.5 - несинхронність обертання роторів силових електричних машин із блоком спостережного засобу ідентифікації при суттєвому відхиленні електричних і механічних постійних часу від номінальних значень. Адаптивний пристрій (Фіг.1) містить задавач кутової швидкості 1, два частотних регулятора 2 і 3, два блока електричної частини електричної машини 4 і 5, два блока механічної частини електричної машини 6 і 7, два датчики кутової швидкості 8 і 9, блок обробки інформації 10, суматор 11 та блок спостережного засобу ідентифікації 12, який складається з трьох суматорів 13, 14 і 15, трьох блоків множення 16, 17 і 18, двох інтеграторів 19 і 20, блока масштабного перетворення 21, блока логічної одиниці "1" та блока ділення 22, причому один з входів блока обробки інформації 10 з'єднано з виходом першого датчика кутової швидкості 8, а вхід першого датчика кутової швидкості 8 з'єднано з виходом першого блока механічної частий 6 першої електричної машини, вхід якого з'єднано з виходом першого блока електричної частини 4 першої електричної машини та першим входом другого суматора 13, а вхід першого блока електричної частини 4 першої електричної машини з'єднано з виходом першого частотного регулятора 2, вхід якого з'єднано з виходом задавача кутової швидкості 1, інший вхід блока обробки інформації 10 з'єднано з виходом другого датчика кутової швидкості 9, а вхід другого датчика кутової швидкості 9 з'єднано з виходом другого блока механічної частини 7 другої електричної машини, вхід якого з'єднано з виходом другого блока електричної частини 5 другої електричної машини та другим входом другого суматора 13, вихід якого з'єднано з першим входом першого блока множення 16 та першим входом другого блока множення 17, вихід першого блока множення 16 з'єднано з першим входом третього суматора 14, вихід якого з'єднано з входом першого інтегратора 19, вихід першого інтегратора 19 з'єднано з одним із входів четвертого суматора 15, інший вхід четвертого суматора 15 з'єднано з виходом блока обробки інформації 10, а вихід четвертого суматора 15 з'єднано з входом блока масштабного перетворення 21 та другим входом другого блока множення 17, вихід блока масштабного перетворення 21 з'єднано з другим входом третього суматора 14, а вихід другого блока множення 17 з'єднано з входом другого інтегратора 20, вихід якого з’єднано з другим входом першого блока множення 16 та першим входом блока ділення 22, другий вхід блока ділення 22 з'єднано з блоком логічної одиниці "1", вихід блока ділення 22 з'єднано з першим входом третього блока множення 18, другий вхід третього блока множення 18 з'єднано з виходом другого частотного регулятора 3, вхід другого частотного регулятора 3 з'єднано з виходом першого суматора 11, входи якого з'єднано з входом задавача кутової швидкості 1 та виходом блока обробки інформації 10, а вхід другого блока електричної частини 5 другої електричної машини з виходом третього блока множення 18. Адаптивний пристрій для вимірювального контролю несинхронності обертання роторів силових електричних машин працює наступним чином. Після задання частот обертання електричних машин за допомогою задавача кутової швидкості 1 вимірюються частоти обертання першої та другої електричної машини, що складаються з блоку електричної частини 4 і 5 та блоку механічної частини 6 і 7 за допомогою датчиків кутової швидкості 8 і 9, а сигнали з виходу датчиків кутової швидкості 8 і 9 надходять на входи блоку обробки інформації 10. Блок обробки інформації 10 представляє собою мікроконтролер, в якому відбувається порівняння частот обертання роторів першої та другої електричної машини, в результаті чого визначається рівень несинхронності обертання роторів силових електричних машин, тобто на виході блока обробки інформації 10 з'являється сигнал, що відповідає різниці частот обертання роторів електричних машин, який при відхиленні частоти обертання другої електричної машини автоматично її підстроює під частоту обертання першої електричної машини. Сигнал з виходу блока обробки інформації 10 одночасно надходить на один з входів суматора 11 і на вхід блока спостережного засобу ідентифікації 12 до суматора 15. На інший вхід суматора 11 заводиться сигнал з виходу задавача кутової швидкості 1, тобто, якщо виникає несинхронність обертання роторів електричних машин, то до сигналу з виходу задавача кутової швидкості 1 додається (чи віднімається) сигнал з виходу блока обробки інформації 10, і на виході суматора 11 з'являється сигнал, що підстроює частоту обертання другої електричної машини під частоту обертання першої електричної машини за допомогою другого частотного перетворювача 3. Несинхронність обертання роторів електричних машин, що виникає в процесі їх роботи, в значній мірі залежить від властивостей механізмів електричних машин, зокрема до відхилення моментів інерції та опору при тривалій експлуатації електричних машин, а це в свою чергу призводить до зміни параметрів електроприводів і підвищення рівня несинхронності обертання роторів електричних машин. Тому для зменшення таких впливів і мінімізації похибки синхронізації, сигнали з виходів першого та другого блоків електричної частини 4 і 5 відповідно та сигнал з виходу блока обробки інформації 10 підключаються до входів блока спостережного засобу ідентифікації 12. До входів другого суматора 13 підключаються струмові сигнали з виходів першого та другого блоків електричної частини 4 і 5 відповідно, сигнал з виходу другого суматора 13 підключається до перших входів першого та другого блоків множення 16 і 17 відповідно, сигнал з виходу першого блока множення 16 підключається до першого входу третього суматора 14, а сигнал з виходу третього суматора 14 підключається до входу першого інтегратора 19 з передатнім коефіцієнтом k, розрахунок якого виконується за умови забезпечення стійкості контуру самонастройки. Сигнал з виходу першого інтегратора 19 надходить до одного із входів четвертого суматора 15, до іншого входу четвертого суматора 15 підключається сигнал з виходу блока обробки інформації 10, що несе інформацію про різницю частот обертання між першою та другою електричною машиною, сигнал з виходу четвертого суматора 15 надходить до другого входу другого блока множення 17 та входу блоку масштабного перетворення 21, коефіцієнт якого вибирається таким, щоб умови протікання в системі процесу оцінювання відбувалися швидше головного перехідного процесу, виходячи з вимого завадостійкості системи, сигнал з виходу блоку масштабного перетворення 21 надходить до другого входу третього суматора 14, а сигнал з виходу другого блока множення 17 підключається до входу другого інтегратора 20 з передатнім коефіцієнтом b, який розраховується аналогічно до коефіцієнта блока масштабного перетворення 21. Сигнал з виходу другого інтегратора 20 надходить до другого входу першого блока множення 16 та до одного з входів блока ділення 22, до іншого входу блока ділення підключається сигнал логічної одиниці "1", сигнал з виходу блока ділення 22 корегує за допомогою третього блока множення 18 коефіцієнти частотного регулятора 3 та параметри електричної машини і підключається до одного із входів третього блока множення 18, а на інший вхід третього блока множення 18 підключається сигнал з виходу другого частотного регулятора 3, сигнал з виходу третього блока множення 18 підключається до входу другого блока електричної частини 5 другої електричної машини. При досліджені роботи адаптивного пристрою для вимірювального контролю несинхронності обертання роторів силових електричних машин, на основі асинхронних електричних машин типу 4А50А4 отримано такі результати. Несинхронність обертання роторів двох силових електричних машин, що визначена за законом різниці частот обертання без підключення спостережного засобу ідентифікації зображено на Фіг.2. А несинхронність обертання роторів силових електричних машин при підключенні спостережного засобу ідентифікації, який побудований на основі інтеграторів із самонастроюванням за параметрами сили струму та кутової швидкості зображено на фіг. 3. З характеристик, що зображені на Фіг.2 і 3 величина несинхронності обертання при підключенні спостережного засобу ідентифікації суттєво зменшилась, що свідчить при підвищення точності синхронізації частот обертання роторів силових електричних машин в 3-4 раза. Відомо, що із збільшенням терміну експлуатації електричних машин їх параметри змінюються, їх зміна призводить до зміни електричних і механічних постійних часу та підвищення рівня несинхронності обертання. Якщо змінити вказані параметри електричних машин, то несинхронність обертання без використання блока спостережного засобу ідентифікації збільшується, що наглядно видно з Фіг.4. При зміні тих же параметрів, але з використанням адаптивного пристрою для вимірювального контролю несинхронності обертання роторів силових електричних машин, характеристика несинхронності обертання набере вигляду (див. Фіг.5). Як видно з Фіг.5 зміна постійних часу не призводить до значного збільшення несинхронності обертання роторів, чого не скажеш про прототип. Отже, використання адаптивного пристрою для вимірювального контролю несинхронності обертання роторів силових електричних машин дозволяє: здійснювати вимірювальний контролю несинхронності обертання роторів електричних машин, синхронізувати з високою точністю кутові швидкості при появі несинхронності та автоматично вносити корекцію при відхилені електричних і механічних параметрів від номінальних значень, тобто адаптувати параметри, що впливають на несинхронність обертання роторів силових електричних машин за рахунок використання спостережного засобу ідентифікації.
ДивитисяДодаткова інформація
Назва патенту англійськоюAdaptive device for measuring control of non-synchronous rotation of rotors of power electric machines
Автори англійськоюVasylevskyi Oleksandr Mykolaiovych, Kravets Oleh Mykolaiovych
Назва патенту російськоюАдаптивное устройство для измерительного контроля несинхронности вращения роторов силовых электрических машин
Автори російськоюВасилевський Александр Николаевич, Кравец Олег Николаевич
МПК / Мітки
МПК: G01P 3/00
Мітки: електричних, роторів, контролю, адаптивний, обертання, вимірювального, машин, силових, несинхронності, пристрій
Код посилання
<a href="https://ua.patents.su/4-31827-adaptivnijj-pristrijj-dlya-vimiryuvalnogo-kontrolyu-nesinkhronnosti-obertannya-rotoriv-silovikh-elektrichnikh-mashin.html" target="_blank" rel="follow" title="База патентів України">Адаптивний пристрій для вимірювального контролю несинхронності обертання роторів силових електричних машин</a>
Пристрій контролю несинхронності обертання електромеханічних систем
Номер патенту: 67650
Опубліковано: 15.06.2004
Автори: Васілевський Олександр Миколайович, Кучерук Володимир Юрійович, Поджаренко Володимир Олександрович, Кабанова Олена В'ячеславівна
МПК: G01P 3/02
Мітки: електромеханічних, обертання, систем, несинхронності, контролю, пристрій
Формула / Реферат:
Пристрій контролю несинхронності обертання електромеханічних систем, який складається з двох регуляторів, двох електродвигунів, двох датчиків кутової швидкості обертання, задавача швидкості обертання електродвигунів, суматора та блока обробки інформації, один з входів якого з'єднано з виходом першого датчика кутової швидкості обертання, а вхід першого датчика кутової швидкості обертання з'єднано з виходом першого електродвигуна, вхід якого...
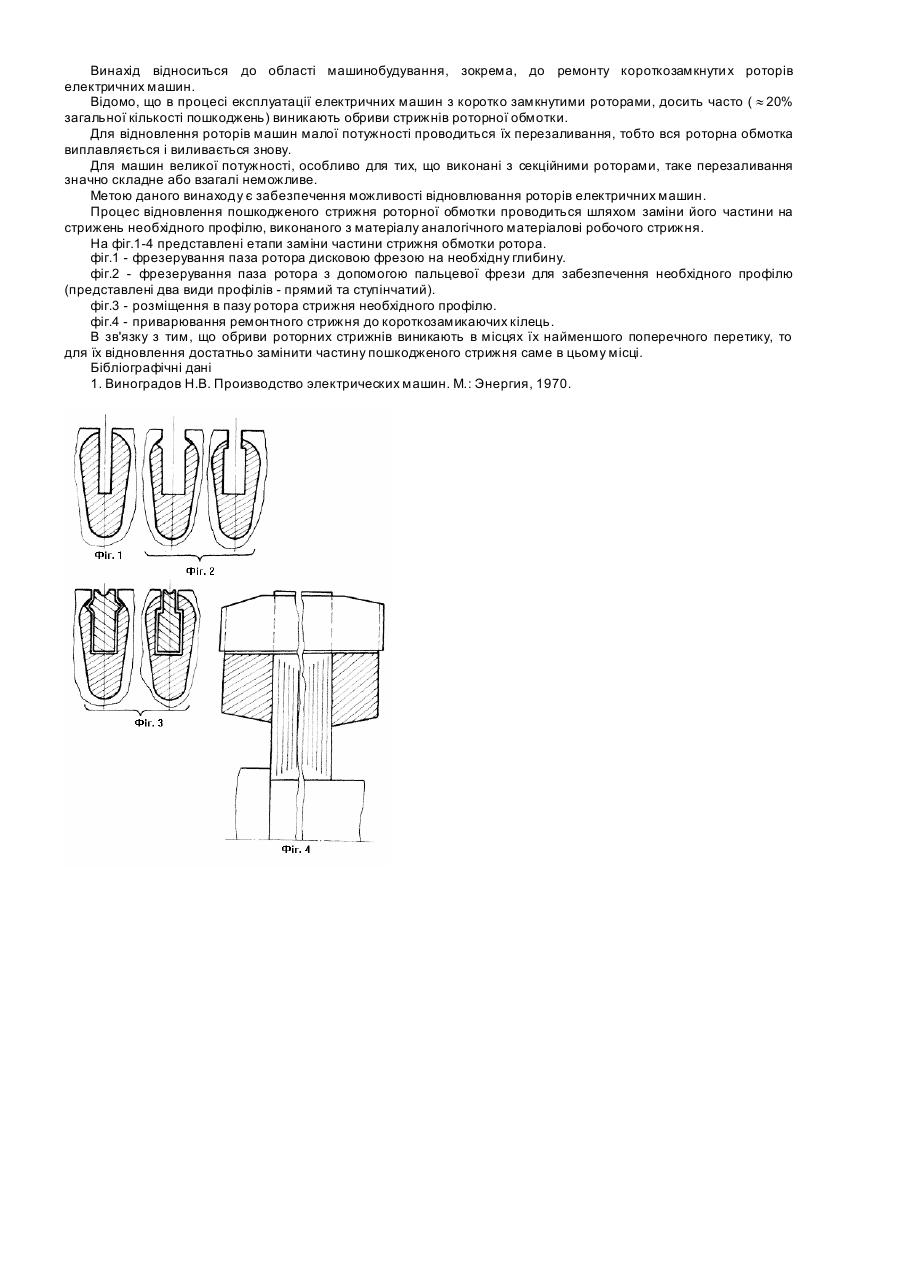
Спосіб відновлювання литих короткозамкнених роторів електричних машин
Номер патенту: 64312
Опубліковано: 16.02.2004
Автори: Ткачук Олександр Миколайович, Ткачук Микола Миколайович, Зубков Сергій Степанович, Каїка Василь Васильович
МПК: B22D 27/00
Мітки: відновлювання, спосіб, машин, роторів, литих, короткозамкнених, електричних
Формула / Реферат:
Спосіб відновлювання литих короткозамкнених роторів електричних машин, який відрізняється тим, що частина пошкодженого стрижня роторної обмотки замінюється на стрижень необхідного профілю, виконаний з матеріалу, аналогічного матеріалу робочого стрижня.
Пристрій діагностики трифазних електричних машин
Номер патенту: 27611
Опубліковано: 12.11.2007
Автори: Ткаченко Андрій Олександрович, Побочій Володимир Григорович, Панкратов Анатолій Іванович, Федоров Михайло Михайлович
МПК: H02H 7/00
Мітки: пристрій, трифазних, електричних, машин, діагностики
Формула / Реферат:
Пристрій діагностики трифазних електричних машин, що містить перший, другий і третій датчики струму, аналого-цифровий перетворювач, електронну обчислювальну машину, блок з'єднання, який відрізняється тим, що в нього введені три фазочутливих детектори, мультиплексор, перший вхід якого через перший фазочутливий детектор підключений до виходу першого і третього датчика струму, другий вхід через другий фазочутливий детектор підключений до виходу...
Спосіб контролю виткової ізоляції обмоток електричних машин та апаратів і пристрій для його здійснення
Номер патенту: 33736
Опубліковано: 15.02.2001
Автори: Макуха Юрій Михайлович, Бешта Олександр Степанович, Желдак Тімур Анатолійович
МПК: G01R 31/34, G01R 31/12
Мітки: обмоток, ізоляції, контролю, апаратів, здійснення, виткової, машин, електричних, спосіб, пристрій
Текст:
...По осі ординат відкладена миттєва напруга відгуку У вольтах. На фіг. 2 подана осцилограма аналогічного перехідного процесу при іспиті якорі двигуна того ж типу, що має короткозамкнені витки. Позначення – подібно до фіг. 1. На фіг. 3 наведена функціональна схема пристрою для контролю виткової ізоляції обмоток електричних машин та апаратів, де 1 - регульоване джерело напруги, 2 - накопичувальний конденсатор, 3 - силовий ключ, 4 - перша...
Пристрій для поліпшення комутації колекторних електричних машин постійного струму
Номер патенту: 33504
Опубліковано: 15.02.2001
Автори: Колб Андрій Антонович, Поляков Микола Георгійович, Іванов Олексій Борисович
МПК: H02K 13/14
Мітки: постійного, електричних, колекторних, комутації, пристрій, поліпшення, струму, машин
Текст:
...і комутуючого потоку, виконаний на базі введених масштабного підсилювача і моделі комутуючого потоку, враховуючої розмагнічувальну дію вихрових струмів, вхід якої залучений до виходу датчика струму якоря, а вихід з'єднаний із першим входом масштабного підсилювача, другий вхід якого залучений до виходу датчика струму якоря, вихід масштабного підсилювача, пропорційний зазначеному сигналу керування, залучений до третього входу підсилювача, що...
Попередній патент: Спосіб зниження токсичності відпрацьованих газів
Наступний патент: Укладальник листів
Випадковий патент: Грохот аналітичний