Пристрій контролю несинхронності обертання електромеханічних систем
Номер патенту: 67650
Опубліковано: 15.06.2004
Автори: Поджаренко Володимир Олександрович, Васілевський Олександр Миколайович, Кучерук Володимир Юрійович, Кабанова Олена В'ячеславівна
Формула / Реферат
Пристрій контролю несинхронності обертання електромеханічних систем, який складається з двох регуляторів, двох електродвигунів, двох датчиків кутової швидкості обертання, задавача швидкості обертання електродвигунів, суматора та блока обробки інформації, один з входів якого з'єднано з виходом першого датчика кутової швидкості обертання, а вхід першого датчика кутової швидкості обертання з'єднано з виходом першого електродвигуна, вхід якого з'єднано з виходом першого регулятора, а вхід регулятора з'єднано з виходом задавача швидкості обертання електродвигунів, інший вхід блока обробки інформації з'єднано з виходом другого датчика кутової швидкості обертання, а вхід другого датчика кутової швидкості обертання з'єднано з виходом другого електродвигуна, вхід якого з'єднано з виходом другого регулятора, вхід другого регулятора з'єднано з виходом суматора, а входи суматора відповідно з'єднані з виходом задавача швидкості обертання електродвигунів та виходом блока обробки інформації, який відрізняється тим, що в нього додатково введено адаптивний блок, який складається з еталонної моделі регулятора, фільтра верхніх та нижніх частот третього порядку, другого суматора, регулятора контуру самонастройки та блока множення, причому вхід еталонної моделі регулятора з'єднано з виходом блока обробки інформації, а вихід еталонної моделі регулятора з'єднано з входами фільтра верхніх та нижніх частот третього порядку, виходи яких з'єднано з входами другого суматора, вихід другого суматора з'єднано з входом регулятора контуру самонастройки, вихід якого з'єднано з першим входом блока множення, вихід блока множення з'єднано з входом першого електродвигуна, а другий вхід блока множення з'єднано з виходом першого регулятора.
Текст
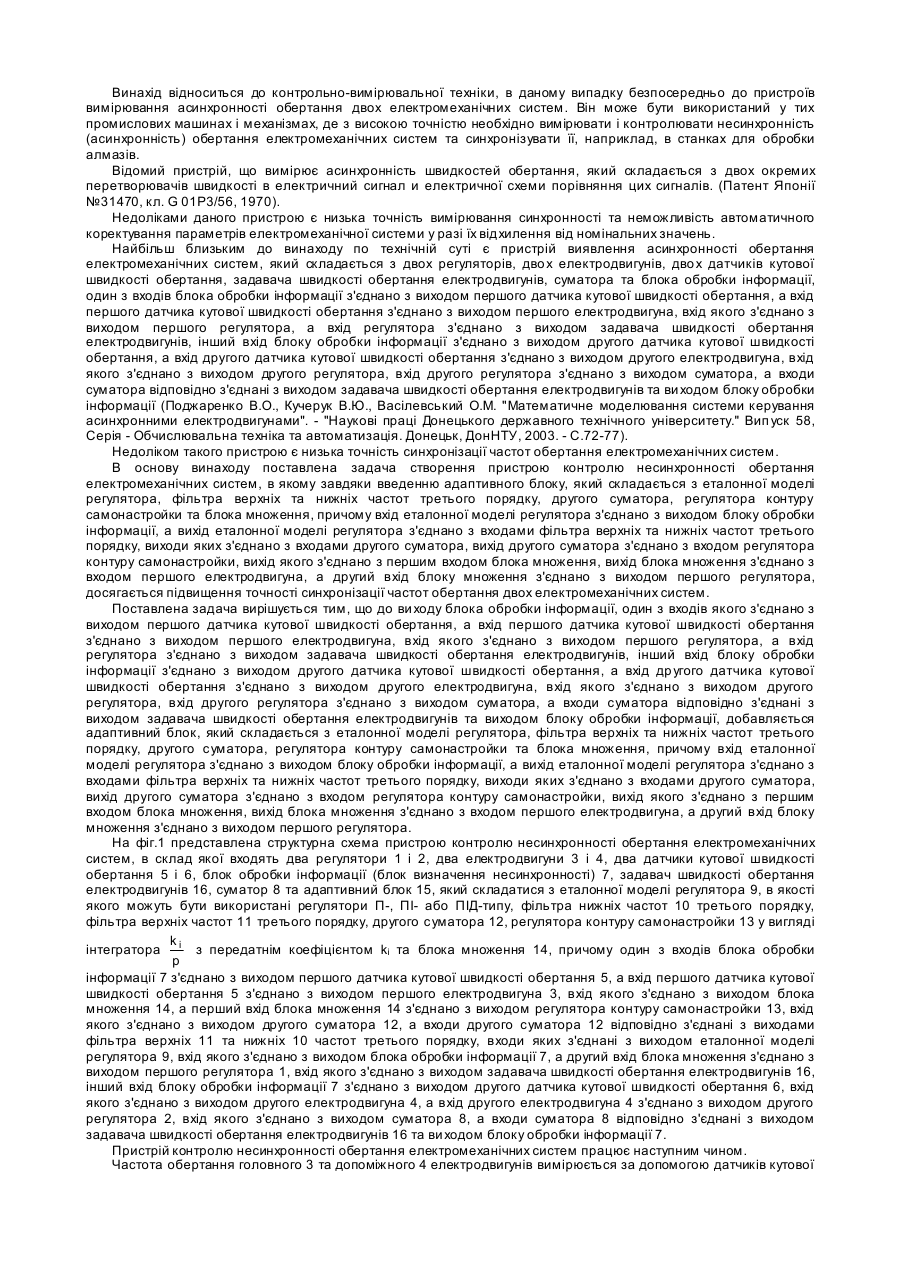
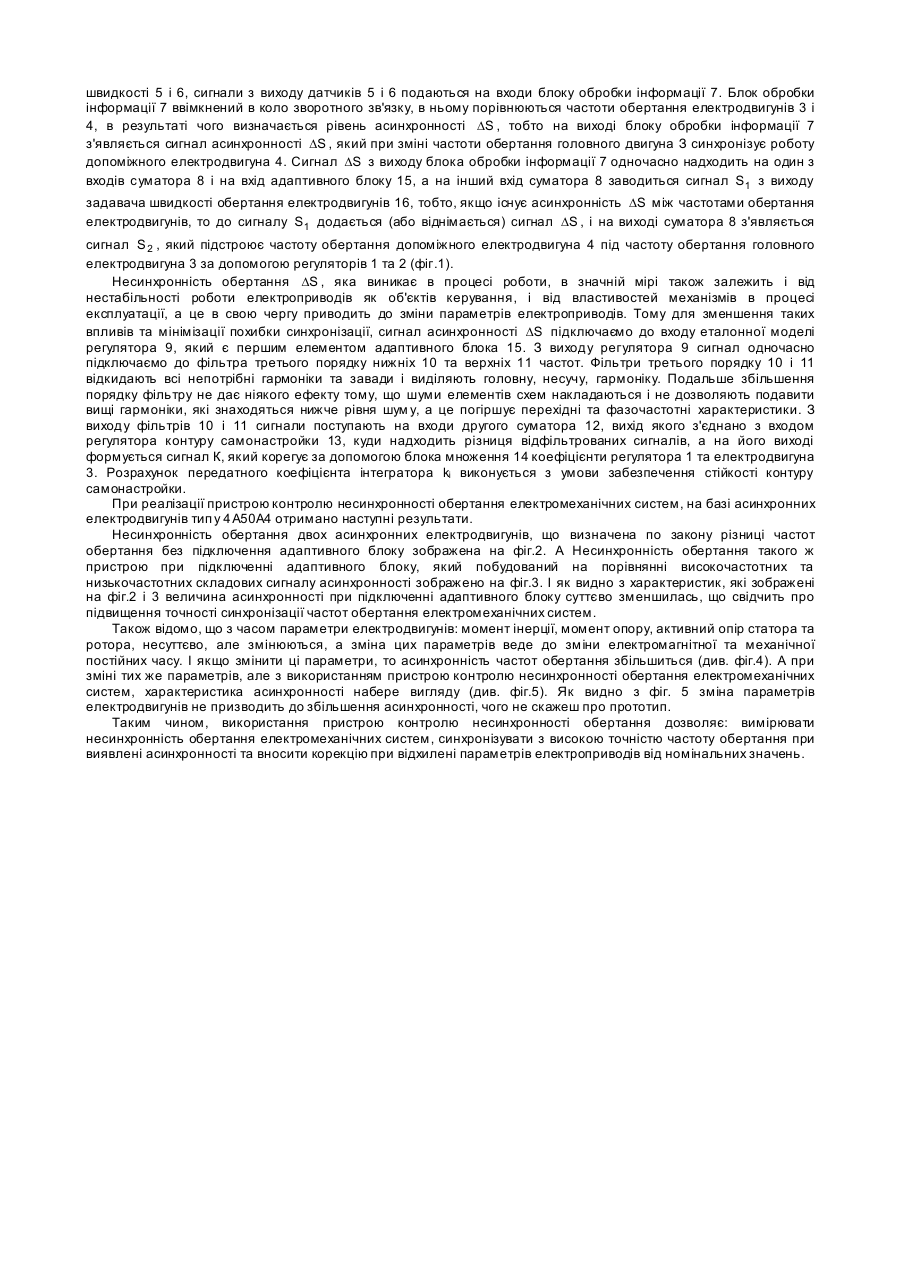
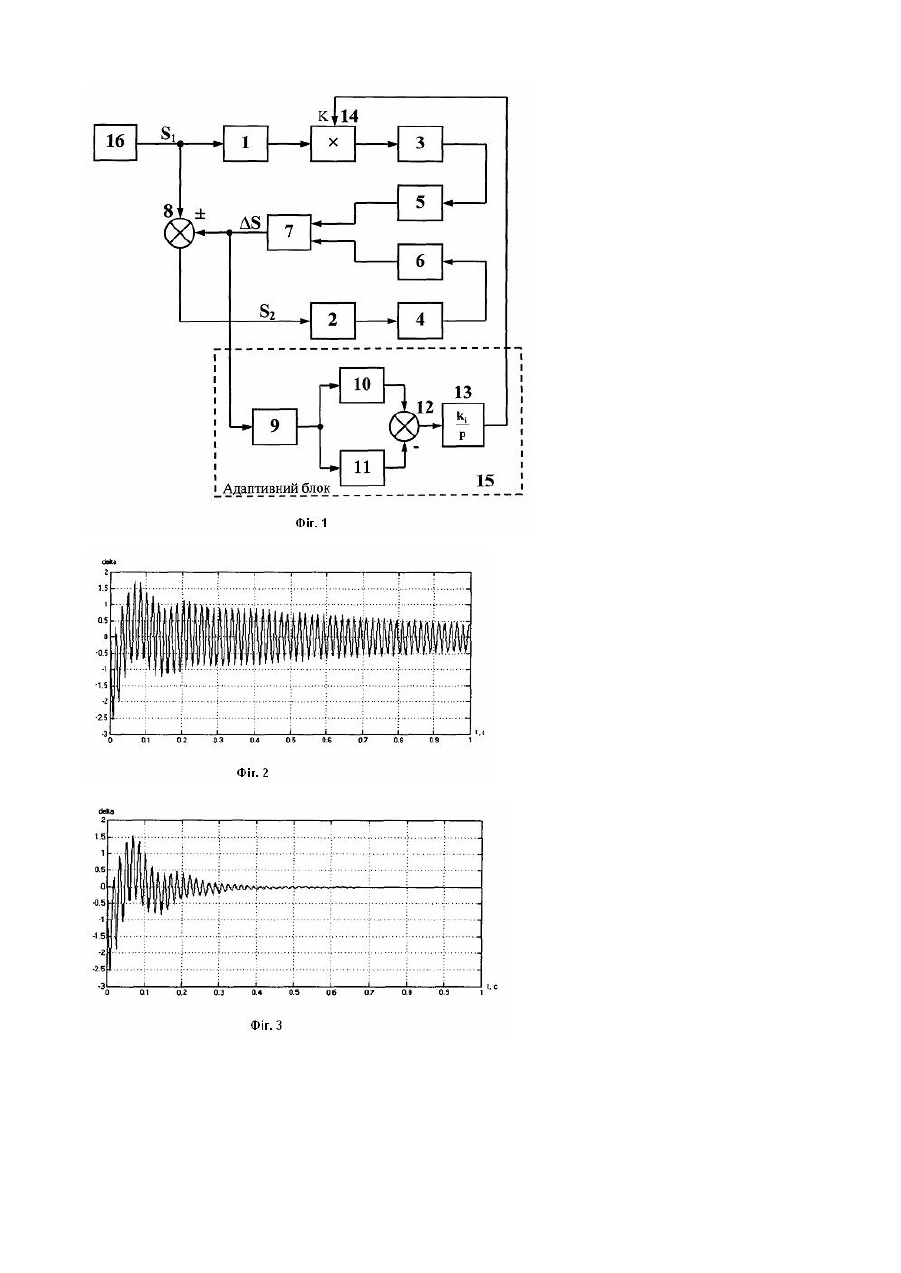
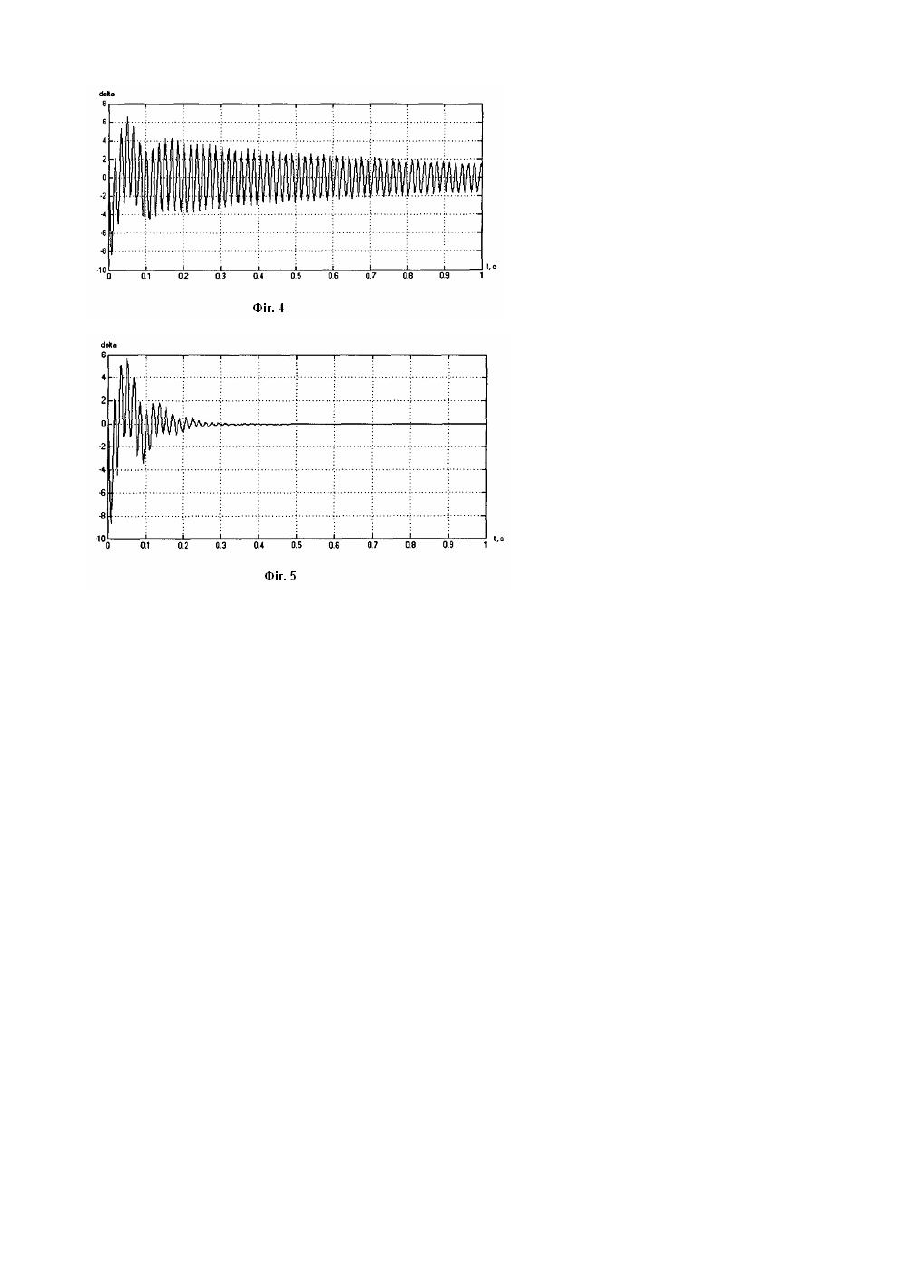
Винахід відноситься до контрольно-вимірювальної техніки, в даному випадку безпосередньо до пристроїв вимірювання асинхронності обертання двох електромеханічних систем. Він може бути використаний у тих промислових машинах і механізмах, де з високою точністю необхідно вимірювати і контролювати несинхронність (асинхронність) обертання електромеханічних систем та синхронізувати її, наприклад, в станках для обробки алмазів. Відомий пристрій, що вимірює асинхронність швидкостей обертання, який складається з двох окремих перетворювачів швидкості в електричний сигнал и електричної схеми порівняння цих сигналів. (Патент Японії №31470, кл. G 01P3/56, 1970). Недоліками даного пристрою є низька точність вимірювання синхронності та неможливість автоматичного коректування параметрів електромеханічної системи у разі їх відхилення від номінальних значень. Найбільш близьким до винаходу по технічній суті є пристрій виявлення асинхронності обертання електромеханічних систем, який складається з двох регуляторів, дво х електродвигунів, дво х датчиків кутової швидкості обертання, задавача швидкості обертання електродвигунів, суматора та блока обробки інформації, один з входів блока обробки інформації з'єднано з виходом першого датчика кутової швидкості обертання, а вхід першого датчика кутової швидкості обертання з'єднано з виходом першого електродвигуна, вхід якого з'єднано з виходом першого регулятора, а вхід регулятора з'єднано з виходом задавача швидкості обертання електродвигунів, інший вхід блоку обробки інформації з'єднано з виходом другого датчика кутової швидкості обертання, а вхід другого датчика кутової швидкості обертання з'єднано з виходом другого електродвигуна, вхід якого з'єднано з виходом другого регулятора, вхід другого регулятора з'єднано з виходом суматора, а входи суматора відповідно з'єднані з виходом задавача швидкості обертання електродвигунів та ви ходом блоку обробки інформації (Поджаренко В.О., Кучерук В.Ю., Васілевський О.М. "Математичне моделювання системи керування асинхронними електродвигунами". - "Наукові праці Донецького державного технічного університету." Вип уск 58, Серія - Обчислювальна техніка та автоматизація. Донецьк, ДонНТУ, 2003. - С.72-77). Недоліком такого пристрою є низька точність синхронізації частот обертання електромеханічних систем. В основу винаходу поставлена задача створення пристрою контролю несинхронності обертання електромеханічних систем, в якому завдяки введенню адаптивного блоку, який складається з еталонної моделі регулятора, фільтра верхніх та нижніх частот третього порядку, другого суматора, регулятора контуру самонастройки та блока множення, причому вхід еталонної моделі регулятора з'єднано з виходом блоку обробки інформації, а вихід еталонної моделі регулятора з'єднано з входами фільтра верхніх та нижніх частот третього порядку, виходи яких з'єднано з входами другого суматора, вихід другого суматора з'єднано з входом регулятора контуру самонастройки, вихід якого з'єднано з першим входом блока множення, вихід блока множення з'єднано з входом першого електродвигуна, а другий вхід блоку множення з'єднано з виходом першого регулятора, досягається підвищення точності синхронізації частот обертання двох електромеханічних систем. Поставлена задача вирішується тим, що до ви ходу блока обробки інформації, один з входів якого з'єднано з виходом першого датчика кутової швидкості обертання, а вхід першого датчика кутової швидкості обертання з'єднано з виходом першого електродвигуна, вхід якого з'єднано з виходом першого регулятора, а вхід регулятора з'єднано з виходом задавача швидкості обертання електродвигунів, інший вхід блоку обробки інформації з'єднано з виходом другого датчика кутової швидкості обертання, а вхід др угого датчика кутової швидкості обертання з'єднано з виходом другого електродвигуна, вхід якого з'єднано з виходом другого регулятора, вхід другого регулятора з'єднано з виходом суматора, а входи суматора відповідно з'єднані з виходом задавача швидкості обертання електродвигунів та виходом блоку обробки інформації, добавляється адаптивний блок, який складається з еталонної моделі регулятора, фільтра верхніх та нижніх частот третього порядку, другого суматора, регулятора контуру самонастройки та блока множення, причому вхід еталонної моделі регулятора з'єднано з виходом блоку обробки інформації, а вихід еталонної моделі регулятора з'єднано з входами фільтра верхніх та нижніх частот третього порядку, виходи яких з'єднано з входами другого суматора, вихід другого суматора з'єднано з входом регулятора контуру самонастройки, вихід якого з'єднано з першим входом блока множення, вихід блока множення з'єднано з входом першого електродвигуна, а другий вхід блоку множення з'єднано з виходом першого регулятора. На фіг.1 представлена структурна схема пристрою контролю несинхронності обертання електромеханічних систем, в склад якої входять два регулятори 1 і 2, два електродвигуни 3 і 4, два датчики кутової швидкості обертання 5 і 6, блок обробки інформації (блок визначення несинхронності) 7, задавач швидкості обертання електродвигунів 16, суматор 8 та адаптивний блок 15, який складатися з еталонної моделі регулятора 9, в якості якого можуть бути використані регулятори П-, ПІ- або ПІД-типу, фільтра нижніх частот 10 третього порядку, фільтра верхніх частот 11 третього порядку, другого суматора 12, регулятора контуру самонастройки 13 у вигляді k інтегратора i з передатнім коефіцієнтом kі та блока множення 14, причому один з входів блока обробки p інформації 7 з'єднано з виходом першого датчика кутової швидкості обертання 5, а вхід першого датчика кутової швидкості обертання 5 з'єднано з виходом першого електродвигуна 3, вхід якого з'єднано з виходом блока множення 14, а перший вхід блока множення 14 з'єднано з виходом регулятора контуру самонастройки 13, вхід якого з'єднано з виходом другого суматора 12, а входи другого суматора 12 відповідно з'єднані з виходами фільтра верхніх 11 та нижніх 10 частот третього порядку, входи яких з'єднані з виходом еталонної моделі регулятора 9, вхід якого з'єднано з виходом блока обробки інформації 7, а другий вхід блока множення з'єднано з виходом першого регулятора 1, вхід якого з'єднано з виходом задавача швидкості обертання електродвигунів 16, інший вхід блоку обробки інформації 7 з'єднано з виходом другого датчика кутової швидкості обертання 6, вхід якого з'єднано з виходом другого електродвигуна 4, а вхід другого електродвигуна 4 з'єднано з виходом другого регулятора 2, вхід якого з'єднано з виходом суматора 8, а входи суматора 8 відповідно з'єднані з виходом задавача швидкості обертання електродвигунів 16 та ви ходом блоку обробки інформації 7. Пристрій контролю несинхронності обертання електромеханічних систем працює наступним чином. Частота обертання головного 3 та допоміжного 4 електродвигунів вимірюється за допомогою датчиків кутової швидкості 5 і 6, сигнали з виходу датчиків 5 і 6 подаються на входи блоку обробки інформації 7. Блок обробки інформації 7 ввімкнений в коло зворотного зв'язку, в ньому порівнюються частоти обертання електродвигунів 3 і 4, в результаті чого визначається рівень асинхронності DS , тобто на виході блоку обробки інформації 7 з'являється сигнал асинхронності DS , який при зміні частоти обертання головного двигуна З синхронізує роботу допоміжного електродвигуна 4. Сигнал DS з виходу блока обробки інформації 7 одночасно надходить на один з входів суматора 8 і на вхід адаптивного блоку 15, а на інший вхід суматора 8 заводиться сигнал S1 з виходу задавача швидкості обертання електродвигунів 16, тобто, якщо існує асинхронність DS між частотами обертання електродвигунів, то до сигналу S1 додається (або віднімається) сигнал DS , і на виході суматора 8 з'являється сигнал S 2 , який підстроює частоту обертання допоміжного електродвигуна 4 під частоту обертання головного електродвигуна 3 за допомогою регуляторів 1 та 2 (фіг.1). Несинхронність обертання DS , яка виникає в процесі роботи, в значній мірі також залежить і від нестабільності роботи електроприводів як об'єктів керування, і від властивостей механізмів в процесі експлуатації, а це в свою чергу приводить до зміни параметрів електроприводів. Тому для зменшення таких впливів та мінімізації похибки синхронізації, сигнал асинхронності DS підключаємо до входу еталонної моделі регулятора 9, який є першим елементом адаптивного блока 15. З виходу регулятора 9 сигнал одночасно підключаємо до фільтра третього порядку нижніх 10 та верхніх 11 частот. Фільтри третього порядку 10 і 11 відкидають всі непотрібні гармоніки та завади і виділяють головну, несучу, гармоніку. Подальше збільшення порядку фільтру не дає ніякого ефекту тому, що шуми елементів схем накладаються і не дозволяють подавити вищі гармоніки, які знаходяться нижче рівня шум у, а це погіршує перехідні та фазочастотні характеристики. З виходу фільтрів 10 і 11 сигнали поступають на входи другого суматора 12, вихід якого з'єднано з входом регулятора контуру самонастройки 13, куди надходить різниця відфільтрованих сигналів, а на його виході формується сигнал К, який корегує за допомогою блока множення 14 коефіцієнти регулятора 1 та електродвигуна 3. Розрахунок передатного коефіцієнта інтегратора kі виконується з умови забезпечення стійкості контуру самонастройки. При реалізації пристрою контролю несинхронності обертання електромеханічних систем, на базі асинхронних електродвигунів тип у 4 А50А4 отримано наступні результати. Несинхронність обертання двох асинхронних електродвигунів, що визначена по закону різниці частот обертання без підключення адаптивного блоку зображена на фіг.2. А Несинхронність обертання такого ж пристрою при підключенні адаптивного блоку, який побудований на порівнянні високочастотних та низькочастотних складових сигналу асинхронності зображено на фіг.3. І як видно з характеристик, які зображені на фіг.2 і 3 величина асинхронності при підключенні адаптивного блоку суттєво зменшилась, що свідчить про підвищення точності синхронізації частот обертання електромеханічних систем. Також відомо, що з часом параметри електродвигунів: момент інерції, момент опору, активний опір статора та ротора, несуттєво, але змінюються, а зміна цих параметрів веде до зміни електромагнітної та механічної постійних часу. І якщо змінити ці параметри, то асинхронність частот обертання збільшиться (див. фіг.4). А при зміні тих же параметрів, але з використанням пристрою контролю несинхронності обертання електромеханічних систем, характеристика асинхронності набере вигляду (див. фіг.5). Як видно з фіг. 5 зміна параметрів електродвигунів не призводить до збільшення асинхронності, чого не скажеш про прототип. Таким чином, використання пристрою контролю несинхронності обертання дозволяє: вимірювати несинхронність обертання електромеханічних систем, синхронізувати з високою точністю частоту обертання при виявлені асинхронності та вносити корекцію при відхилені параметрів електроприводів від номінальних значень.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for monitoring asynchronous rotation of electromechanical systems
Автори англійськоюPodzharenko Volodymyr Oleksandrovych, Vasylevskyi Oleksandr Mykolaiovych, Kucheruk Volodymyr Yuriiovych
Назва патенту російськоюУстройство для контроля несинхронности вращения электромеханических систем
Автори російськоюПоджаренко Владимир Александрович, Василевський Александр Николаевич, Кучерук Владимир Юрьевич
МПК / Мітки
МПК: G01P 3/02
Мітки: систем, електромеханічних, пристрій, контролю, обертання, несинхронності
Код посилання
<a href="https://ua.patents.su/4-67650-pristrijj-kontrolyu-nesinkhronnosti-obertannya-elektromekhanichnikh-sistem.html" target="_blank" rel="follow" title="База патентів України">Пристрій контролю несинхронності обертання електромеханічних систем</a>
Пристрій для пуску потужних електромеханічних систем на базі асинхронних електродвигунів з фазним ротором
Номер патенту: 15336
Опубліковано: 30.06.1997
Автори: Сердюков Юрій Павлович, Лобас Віктор Григорович, Калюжний Володимир Владиславович
МПК: H02P 25/16, H02P 5/00
Мітки: систем, потужних, електродвигунів, фазним, пуску, електромеханічних, асинхронних, базі, ротором, пристрій
Формула / Реферат:
Устройство для пуска мощных электромеханических систем на базе асинхронных электродвигателей с фазным ротором, содержащее параметрический источник тока с неуправляемым вентильным комплектом на выходе электродвигателей, фазные роторы которых связаны со входами переменного тока соответствующих неуправляемых вентильных комплектов, выходы постоянного тока которых включены через пусковое сопротивление согласно-последовательно между собой и с...
Спосіб ультразвукового контролю виробів у вигляді тіл обертання і пристрій для його реалізації
Номер патенту: 39453
Опубліковано: 15.06.2001
Автори: Погребенник Володимир Дмитрович, Крайківський Ростислав Степанович
МПК: G01N 29/34
Мітки: ультразвукового, реалізації, вигляді, тіл, контролю, спосіб, пристрій, виробів, обертання
Формула / Реферат:
1. Спосіб ультразвукового контролю виробів у вигляді тіл обертання, який полягає у тому, що у виріб випромінюють імпульси ультразвукових коливань у процесі його сканування похилим променем перетворювача, приймають відбиті від дефекта ехо-сигнали і вимірюють їх час надходження ti відносно сигналу зондування, а наявність дефекту визначають при досягненні встановленого значення різницею часів надходження відбитого сигналу у двох послідовних...
Пристрій розв’язання систем лінійних алгебраїчних рівнянь
Номер патенту: 30670
Опубліковано: 15.12.2000
Автори: Балашов Андрій Юрійович, Чеботарьов Максим Леонтійович, Юр'єв Юрій Миколайович, Жуков Ігор Анатолійович
МПК: G06F 17/11, G06F 17/16, G06F 7/22
Мітки: систем, лінійних, пристрій, алгебраїчних, рівнянь, розв'язання
Текст:
...кожно го обчислювального модуля, з входом скидання регістра та з першим керуючим входом другого обчислювального блока, перший інформаційний вхід якого з'єднано з другим інформаційним входом елементу АБО, другий та третій керуючі входи другого обчислювального блока з'єднані відповідно з першим та другим керуючими входами кожного обчислювального модуля, другий інформаційний вхід кожного обчислювального модуля з'єднано відповідно з n...
Пристрій контролю параметрів насосної установки
Номер патенту: 55324
Опубліковано: 17.03.2003
Автори: Чорний Олексій Петрович, Пасмурских Олександр Олексійович, Сісюк Генадій Юрійович, Коренькова Тетяна Валеріївна, Луговой Анатолій Васильович, Родькін Дмитро Йосипович
МПК: F04D 15/00
Мітки: пристрій, параметрів, насосної, установки, контролю
Формула / Реферат:
Пристрій контролю параметрів насосної установки, що містить перетворювач для живлення силового кола двигуна, асинхронний двигун, відцентровий насос, який відрізняється тим, що додатково обладнаний датчиком потужності на затискачах статора асинхронного двигуна, датчиками струму статора, напруги і частоти, першим, другим і третім суматорами, блоком визначення втрат двигуна, обчислювальним блоком для визначення фактичних параметрів насосної...
Пристрій для автоматичного регулювання періоду подавання фарби у фарбових апаратах друкарських машин
Номер патенту: 57339
Опубліковано: 16.06.2003
Автори: Бабінець Василь Михайлович, Верхола Михайло Іванович, Никифорук Богдан Васильович
МПК: B41F 31/00
Мітки: подавання, фарби, регулювання, апаратах, періоду, машин, фарбових, пристрій, автоматичного, друкарських
Формула / Реферат:
Пристрій для автоматичного регулювання періоду подавання фарби у фарбових апаратах друкарських машин, який містить електродвигун, механічно з'єднаний, через кулачок, з передавальним валиком, а електрично - з блоком керування швидкістю обертання, імпульсні датчики швидкості обертання, входами механічно з'єднані з валом електродвигуна приводу формного циліндра та валом електродвигуна приводу передавального валика, а виходами - електрично з...
Попередній патент: Спосіб корекції мовної адаптації до знімних зубних протезів
Наступний патент: Оптоелектронний модуль
Випадковий патент: Гідростатичний підшипник ковзання