Датчик кутових переміщень
Номер патенту: 37455
Опубліковано: 25.11.2008
Автори: Савостьянова Анна Олегівна, Гордін Олександр Григорович

Формула / Реферат
Датчик кутових переміщень, що містить корпус, кругову напрямну призму, рухому каретку, рухому раму, струнний перетворювач інформації та систему обробки інформації, який відрізняється тим, що кругова напрямна призма є нерухомою, виконана ще одна рухома каретка, розташована під кутом 90 ° відносно першої, кожна з рухомих кареток складається з першого гідроциліндра, всередині якого знаходиться поршень, з'єднаний за допомогою пружини з ходовим роликом, каретки зв'язані за допомогою з'єднуючих штоків із елементом, кутові переміщення якого вимірюються, додатково введено два нерухомі гідроциліндри із сильфонами, зв'язані кожен через відповідний жорсткий шток з одного боку зі своєю рухомою рамою і через відповідну з'єднуючу гідромагістраль з іншого боку - з першим гідроциліндром, введено додатково струнний перетворювач інформації і ідентичну двоканальну систему обробки інформації.
Текст
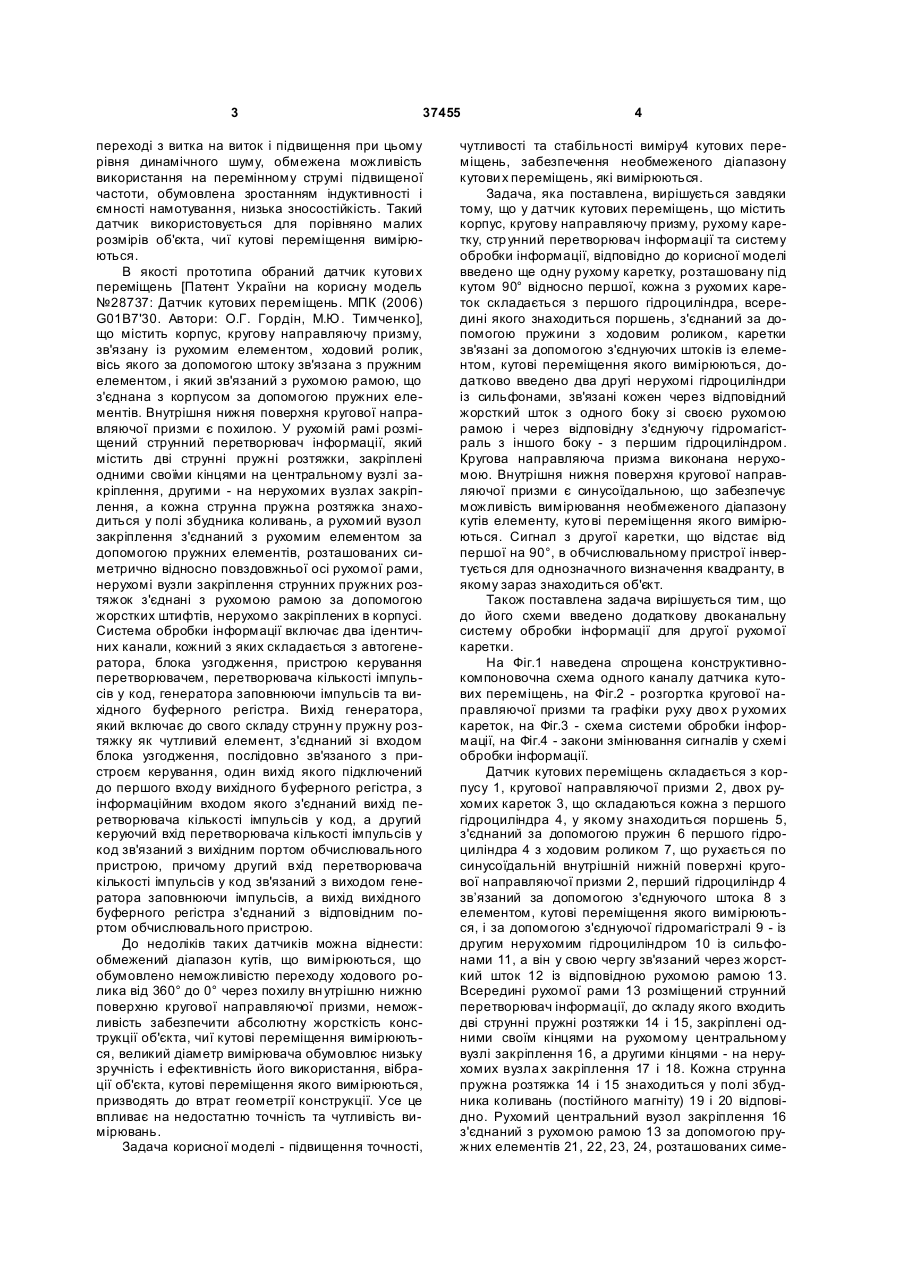
Датчик кутових переміщень, що містить корпус, кругову напрямну призму, р ухому каретку, рухому раму, струнний перетворювач інформації та систему обробки інформації, який відрізняється тим, що кругова напрямна призма є нерухомою, виконана ще одна рухома каретка, розташована 3 37455 переході з витка на виток і підвищення при цьому рівня динамічного шуму, обмежена можливість використання на перемінному струмі підвищеної частоти, обумовлена зростанням індуктивності і ємності намотування, низька зносостійкість. Такий датчик використовується для порівняно малих розмірів об'єкта, чиї кутові переміщення вимірюються. В якості прототипа обраний датчик кутови х переміщень [Патент України на корисну модель №28737: Датчик кутових переміщень. МПК (2006) G01B7'30. Автори: О.Г. Гордін, М.Ю. Тимченко], що містить корпус, кругову направляючу призму, зв'язану із рухомим елементом, ходовий ролик, вісь якого за допомогою штоку зв'язана з пружним елементом, і який зв'язаний з рухомою рамою, що з'єднана з корпусом за допомогою пружних елементів. Внутрішня нижня поверхня кругової направляючої призми є похилою. У рухомій рамі розміщений струнний перетворювач інформації, який містить дві струнні пружні розтяжки, закріплені одними своїми кінцями на центральному вузлі закріплення, другими - на нерухомих вузлах закріплення, а кожна струнна пружна розтяжка знаходиться у полі збудника коливань, а рухомий вузол закріплення з'єднаний з рухомим елементом за допомогою пружних елементів, розташованих симетрично відносно повздовжньої осі рухомої рами, нерухомі вузли закріплення струнних пружних розтяжок з'єднані з рухомою рамою за допомогою жорстких штифтів, нерухомо закріплених в корпусі. Система обробки інформації включає два ідентичних канали, кожний з яких складається з автогенератора, блока узгодження, пристрою керування перетворювачем, перетворювача кількості імпульсів у код, генератора заповнюючи імпульсів та вихідного буферного регістра. Вихід генератора, який включає до свого складу струнн у пружну розтяжку як чутливий елемент, з'єднаний зі входом блока узгодження, послідовно зв'язаного з пристроєм керування, один вихід якого підключений до першого входу вихідного буферного регістра, з інформаційним входом якого з'єднаний вихід перетворювача кількості імпульсів у код, а другий керуючий вхід перетворювача кількості імпульсів у код зв'язаний з вихідним портом обчислювального пристрою, причому другий вхід перетворювача кількості імпульсів у код зв'язаний з виходом генератора заповнюючи імпульсів, а вихід вихідного буферного регістра з'єднаний з відповідним портом обчислювального пристрою. До недоліків таких датчиків можна віднести: обмежений діапазон кутів, що вимірюються, що обумовлено неможливістю переходу ходового ролика від 360° до 0° через похилу вн утрішню нижню поверхню кругової направляючої призми, неможливість забезпечити абсолютну жорсткість конструкції об'єкта, чиї кутові переміщення вимірюються, великий діаметр вимірювача обумовлює низьку зручність і ефективність його використання, вібрації об'єкта, кутові переміщення якого вимірюються, призводять до втрат геометрії конструкції. Усе це впливає на недостатню точність та чутливість вимірювань. Задача корисної моделі - підвищення точності, 4 чутливості та стабільності виміру4 кутових переміщень, забезпечення необмеженого діапазону кутови х переміщень, які вимірюються. Задача, яка поставлена, вирішується завдяки тому, що у датчик кутових переміщень, що містить корпус, кругову направляючу призму, рухому каретку, стр унний перетворювач інформації та систему обробки інформації, відповідно до корисної моделі введено ще одну рухому каретку, розташовану під кутом 90° відносно першої, кожна з рухомих кареток складається з першого гідроциліндра, всередині якого знаходиться поршень, з'єднаний за допомогою пружини з ходовим роликом, каретки зв'язані за допомогою з'єднуючих штоків із елементом, кутові переміщення якого вимірюються, додатково введено два другі нерухомі гідроциліндри із сильфонами, зв'язані кожен через відповідний жорсткий шток з одного боку зі своєю рухомою рамою і через відповідну з'єднуючу гідромагістраль з іншого боку - з першим гідроциліндром. Кругова направляюча призма виконана нерухомою. Внутрішня нижня поверхня кругової направляючої призми є синусоїдальною, що забезпечує можливість вимірювання необмеженого діапазону кутів елементу, куто ві переміщення якого вимірюються. Сигнал з другої каретки, що відстає від першої на 90°, в обчислювальному пристрої інвертується для однозначного визначення квадранту, в якому зараз знаходиться об'єкт. Також поставлена задача вирішується тим, що до його схеми введено додаткову двоканальну систему обробки інформації для другої рухомої каретки. На Фіг.1 наведена спрощена конструктивнокомпоновочна схема одного каналу датчика кутових переміщень, на Фіг.2 - розгортка кругової направляючої призми та графіки руху дво х р ухомих кареток, на Фіг.3 - схема системи обробки інформації, на Фіг.4 - закони змінювання сигналів у схемі обробки інформації. Датчик кутових переміщень складається з корпусу 1, кругової направляючої призми 2, двох рухомих кареток 3, що складаються кожна з першого гідроциліндра 4, у якому знаходиться поршень 5, з'єднаний за допомогою пружин 6 першого гідроциліндра 4 з ходовим роликом 7, що рухається по синусоїдальній внутрішній нижній поверхні кругової направляючої призми 2, перший гідроциліндр 4 зв’язаний за допомогою з'єднуючого штока 8 з елементом, кутові переміщення якого вимірюються, і за допомогою з'єднуючої гідромагістралі 9 - із другим нерухомим гідроциліндром 10 із сильфонами 11, а він у свою чергу зв'язаний через жорсткий шток 12 із відповідною рухомою рамою 13. Всередині рухомої рами 13 розміщений струнний перетворювач інформації, до складу якого входить дві струнні пружні розтяжки 14 і 15, закріплені одними своїм кінцями на рухомому центральному вузлі закріплення 16, а другими кінцями - на нерухомих вузлах закріплення 17 і 18. Кожна струнна пружна розтяжка 14 і 15 знаходиться у полі збудника коливань (постійного магніту) 19 і 20 відповідно. Рухомий центральний вузол закріплення 16 з'єднаний з рухомою рамою 13 за допомогою пружних елементів 21, 22, 23, 24, розташованих симе 5 37455 трично відносно повздовжньої осі рухомої рами 13. Струнні пружні розтяжки 14 і 15 у початковому стані (у статичному режимі) мають початкове натяжіння, при цьому власні частоти поперечних коливань обох розтяжок у полі магнітів 19 і 20 співпадають. Кожна з двох систем обробки інформації датчика кутови х переміщень включає два ідентичних канала 35, 36, 37, 38, кожний з яких складається з автогенератора 26, блока узгодження 27, пристрою 28 керування перетворювачем, перетворювача 29 кількості імпульсів у код, генератора 30 заповнюючих імпульсів та вихідного буферного регістра 31. Вихід генератора 26 з'єднаний зі входом блока узгодження 27, послідовно зв'язаного з пристроєм 28 керування, один вихід якого підключений до першого входу перетворювача 29 кількості імпульсів у код, а другий вихід - до першого керуючого входу ви хідного буферного регістра 31, із інформаційним входом якого з'єднаний вихід перетворювача 29 кількості імпульсів у код, а другий керуючий вхід 33 перетворювача 29 кількості імпульсів у код зв'язаний з вихідним портом обчислювального пристрою 34. Другий вхід перетворювача 29 кількості імпульсів у код зв'язаний з виходом генератора 30 заповнюючих імпульсів, а вихід 32 вихідного буферного регістра 31 з'єднаний із відповідним портом обчислювального пристрою 34. Датчик кутових переміщень працює наступним чином. У процесі кутового переміщення рухомої каретки 24 змінюється стан ходового ролика 6 по вертикалі h = kx, x = rj, h = krj , (1) де h - хід ролика по вертикалі, j - кут повороту рухомої частини об'єкта або рухомої каретки 3, r - радіус кругової направляючої призми 2, по якій рухається ходовий ролик 7, k - коефіцієнт нахилу площини кругової направляючої призми 2, по якій рухається ходовий ролик 7. Хід h ходового ролика 7 по вертикалі обумовлює зміну об'єму першого гідроциліндру 6, заповненого рідиною DV1 = S1h; D V1 = S1krj , (2) де S1 - площа поперечного перетину першого гідроциліндру 6. Оскільки перший гідроциліндр 6, з'єднуюча гідромагістраль 9, другий нерухомий гідроциліндр 10 є єдиною системою, то зміна об'єму рідини у першому гідроциліндрі 6 спричиняє зміну об'єму рідини у др угому нерухомому гідроциліндрі 10 за рахунок зміни довжини сильфона 11 як пружного елемента DV2 = S 2 x c ; (3) де D V2 - зміна об'єму рідини у другому гідро циліндрі, S 2 - середня площа поперечного перетину сильфона 11. Але DV2 = D V1 , тобто S 2 x c = S1krj , 6 S1krj . (4) S2 Сильфон 11 за допомогою жорсткого штока 12 з'єднаний з рухомою рамою 13, за рахунок чого існує вплив жорсткого штока 12 сильфона 11 на пружні елементи 11, 12, 13, 14. У процесі зміни їх стану з'являються зусилля, прикладені до центрального вузла закріплення 15 струнних пружних розтяжок 17, 18. це зусилля можна представити як cS1krj DF = cxc = , (5) S2 де c - коефіцієнт пружності системи пружних елементів 21, 22, 23, 24. Частота власних коливань струнної пружної розтяжки на першій гармоніці можна визначити як xc = 1 F F або f 2 = , (6) 2 ml 4ml де F - сила, прикладена до струнної пружної розтяжки, m - маса струнної пружної розтяжки, l довжина активної частини струнної пружної розтяжки. При зміні сили, прикладеної до струнної пружної розтяжки, змінюється частота її власних коливань f= 1 F0 + D F , (7) 2 ml де F0 - сила початкового на тяжіння струнної f = f0 + D f = пружної розтяжки, f 0 - частота власних коливань струнної пружної розтяжки, що відповідає силі F0 . Отже, для струнних пружних розтяжок 14 і 15 можемо записати відповідно наступні рівняння cS1krj cS krj F0 + F0 - 1 S2 S2 2 2 . (8) f17 = , f18 = 4ml 4ml Періоди власних коливань струнних пружних розтяжок 14 і 15 знайдемо як 1 1 T17 = ,T = або f17 18 f18 T17 é ê 1 =ê ê2 ê ê ë F0 + cS1krj S2 4ml ù ú ú ú ú ú û -1 , -1 é cS kr j ù F0 - 1 ê ú 1 S2 ú T18 = ê . (9) ê2 ú 4ml ê ú ê ú ë û Вихідний сигнал перетворювача інформації кількість імпульсів генератора 30 заповнюючих імпульсів високої частоти за половину періоду коливань струнної пружної розтяжки, буде дорівнювати відповідно для кожної струнної пружної розтяжки 14, 15 7 n17 = 1 fT17 2 é cS1krj F0 + ê 1 ê1 S2 = f 2 ê2 4ml ê ê ë 37455 ù ú ú ú ú ú û -1 , -1 é cS krj ù F0 - 1 ê ú 1 1 ê1 S2 ú n18 = fT18 = f . (10) ú 2 2 ê2 4ml ê ú ê ú ë û дe f - частота заповнюючи імпульсів. Таким чином, використання в датчику кутови х переміщень направляючої кругової призми, закріпленої нерухомо, внутрішня нижня поверхня якої є синусоїдальною, і двох рухомих кареток, розташованих під кутом 90° відносно одне одного і сигнал руху однієї з яких інвертовано, кожна з рухомих кареток складається з першого гідроциліндра, всередині якого знаходиться поршень, з'єднаний за допомогою пружини з ходовим роликом, каретки зв'язані за допомогою з’єднуючих штоків із елементом, кутові переміщення якого вимірюються, додатково введено два другі нерухомі гідроциліндри із сильфонами, зв'язані кожен через відповід Комп’ютерна в ерстка О. Рябко 8 ну з'єднуючу гідромагістраль з одного боку з першим гідроциліндром і через відповідний жорсткий шток з іншого боку - зі своєю р ухомою рамою, що з'єднана з корпусом за допомогою пружних елементів, у кожній із двох р ухомих рам розміщено струнний перетворювач інформації, який містить дві стр унні пружні розтяжки, закріплені одними своїми кінцями на центральному вузлі закріплення, другими - на нерухомих вузлах закріплення, а кожна струнна пружна розтяжка знаходиться у полі збудника коливань, рухомий вузол закріплення з'єднаний з рухомим елементом за допомогою пружних елементів, розташованих симетрично відносно повздовжньої осі рухомої рами, нерухомі вузли закріплення струнних пружинних розтяжок з'єднані з рухомою рамою за допомогою жорстких шти фтів, нерухомо закріплених в корпусі, дозволяє досягти наступного позитивного результату: 1. Підвищення точності виміру кутови х переміщень. 2. Забезпечення необмеженого діапазону вимірювання кутових переміщень. 3. Можливість вимірювати кутові переміщення об'єктів великих діаметрів. Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюIndicator of angular displacements
Автори англійськоюHordin Oleksandr Hryhorovych, Savostianova Anna Olehivna
Назва патенту російськоюДатчик угловых перемещений
Автори російськоюГордин Александр Григорьевич, Савостьянова Анна Олеговна
МПК / Мітки
МПК: G01B 7/30
Мітки: переміщень, датчик, кутових
Код посилання
<a href="https://ua.patents.su/4-37455-datchik-kutovikh-peremishhen.html" target="_blank" rel="follow" title="База патентів України">Датчик кутових переміщень</a>
Датчик кутових переміщень
Номер патенту: 28737
Опубліковано: 25.12.2007
Автори: Тимченко Марина Юріївна, Гордін Олександр Григорович
МПК: G01B 7/30
Мітки: кутових, переміщень, датчик
Формула / Реферат:
1 Датчик кутових переміщень, що містить корпус та рухомий елемент, який відрізняється тим, що в його склад введено кругову призму, зв'язану з рухомим елементом, ходовий ролик, вісь якого за допомогою штока зв'язана з першим пружним елементом і який зв'язаний з рухомою рамою, що з'єднана з корпусом за допомогою другого пружного елемента, розміщений у рухомій рамі струнний перетворювач інформації, який містить дві струнні пружні розтяжки,...
Датчик лінійних переміщень
Номер патенту: 26943
Опубліковано: 10.10.2007
Автори: Гордін Олександр Григорович, Скічко Юлія Іванівна
МПК: G01B 21/00
Мітки: датчик, лінійних, переміщень
Формула / Реферат:
1. Датчик лінійних переміщень, що містить корпус та шток, який відрізняється тим, що до його складу введено об'ємну призму, ходовий ролик, вісь якого зв'язана з пружним елементом, який зв'язаний з рухомою рамою, що з'єднана з корпусом за допомогою пружного елементу, у рухомій рамі розташований струнний перетворювач інформації, який містить дві струнні пружні розтяжки, закріплені одними своїми кінцями на рухомому вузлі закріплення, другими -...
Датчик кутових переміщень з електронною схемою визначення кута нахилу
Номер патенту: 50687
Опубліковано: 15.10.2002
Автори: Павленко Юрій Федорович, Галицький Анатолій Петрович
МПК: G01P 15/13
Мітки: датчик, нахилу, кута, електронною, переміщень, кутових, схемою, визначення
Формула / Реферат:
Датчик кутових переміщень, що містить механічну частину, що складається з маятника, підвішеного на, щонайменше, одній балці, двох котушок індуктивності, що входять до складу датчиків відхилення маятника від середнього положення, і двигуна лінійного типу, що має котушку індуктивності, розташовану на маятнику, і два магніти з зустрічно орієнтованими полями, які розташовані з боків котушки і закріплені нерухомо, і електронну частину, що включає...
Перетворювач кутових переміщень
Номер патенту: 48359
Опубліковано: 15.01.2004
Автори: Перепада Борис Антонович, Хащін Юрій Олександрович, Перепада Максим Борисович, Копп Вадим Якович
МПК: G01B 21/00, G01B 11/00
Мітки: кутових, перетворювач, переміщень
Формула / Реферат:
Перетворювач кутових переміщень, що містить відліковий пристрій у вигляді растрового диска, елементи зчитування та відображення інформації, який відрізняється тим, що відліковий пристрій виконаний у вигляді диска, оснащеного приводом, з можливістю безперервного обертання і нанесеним на ньому (магнітними чи оптичними) вимірювальним растром та штрихом, який вказує на початок та кінець зчитування інформації (кут повороту), причому диск оснащений...
Фотоелектричний перетворювач кутових переміщень
Номер патенту: 33044
Опубліковано: 10.06.2008
Автори: Бурлєєв Олег Леонідович, Кошовий Микола Дмитрович
МПК: G01B 11/26
Мітки: фотоелектричний, кутових, переміщень, перетворювач
Формула / Реферат:
Фотоелектричний перетворювач кутових переміщень, що містить оптично зв'язані джерело світла, світловод та фотоприймальний блок, який відрізняється тим, що він оснащений встановленим під кутом b до горизонтальної осі, яка проходить через центр обертання об'єкта дослідження, дзеркалом, вхідні торці світловодів розміщені по горизонтальній лінії таким чином, щоб положення кожного торця відповідало конкретному куту повороту об'єкта, причому...
Попередній патент: Спосіб визначення вмісту в твердій фазі пульпи мінеральних домішок
Наступний патент: Спосіб морфологічної верифікації апоптозу
Випадковий патент: Колірний інтерферометричний детектор речовини у пробі