Спосіб вимірювання затримки електричних імпульсів
Номер патенту: 37846
Опубліковано: 10.12.2008
Автори: Скрипник Юрій Олексійович, Санніков Володимир Юрійович
Формула / Реферат
Спосіб вимірювання затримки електричних імпульсів, при якому подають послідовно із затримкою зондуючі імпульси на об'єкт, приймають на вході об'єкта зондуючі і відбиті імпульси, регулюють частоти проходження імпульсів і визначають затримку імпульсів, який відрізняється тим, що після прийняття зондуючих імпульсів на вході об'єкта їх блокують в послідовності імпульсів, отримують додатковий перевідбитий імпульс, порівнюють часові інтервали між першим відбитим і першим перевідбитим імпульсами та між першим перевідбитим і другим відбитим імпульсами, регулювання частоти проходження зондуючих імпульсів здійснюють до вирівнювання часових інтервалів, що порівнюються, вимірюють її, а затримку імпульсів визначають за формулою:
![]() ,
,
де f0 - частота проходження перших відбитих імпульсів при збігу других перевідбитих імпульсів із зондуючими імпульсами.
Текст
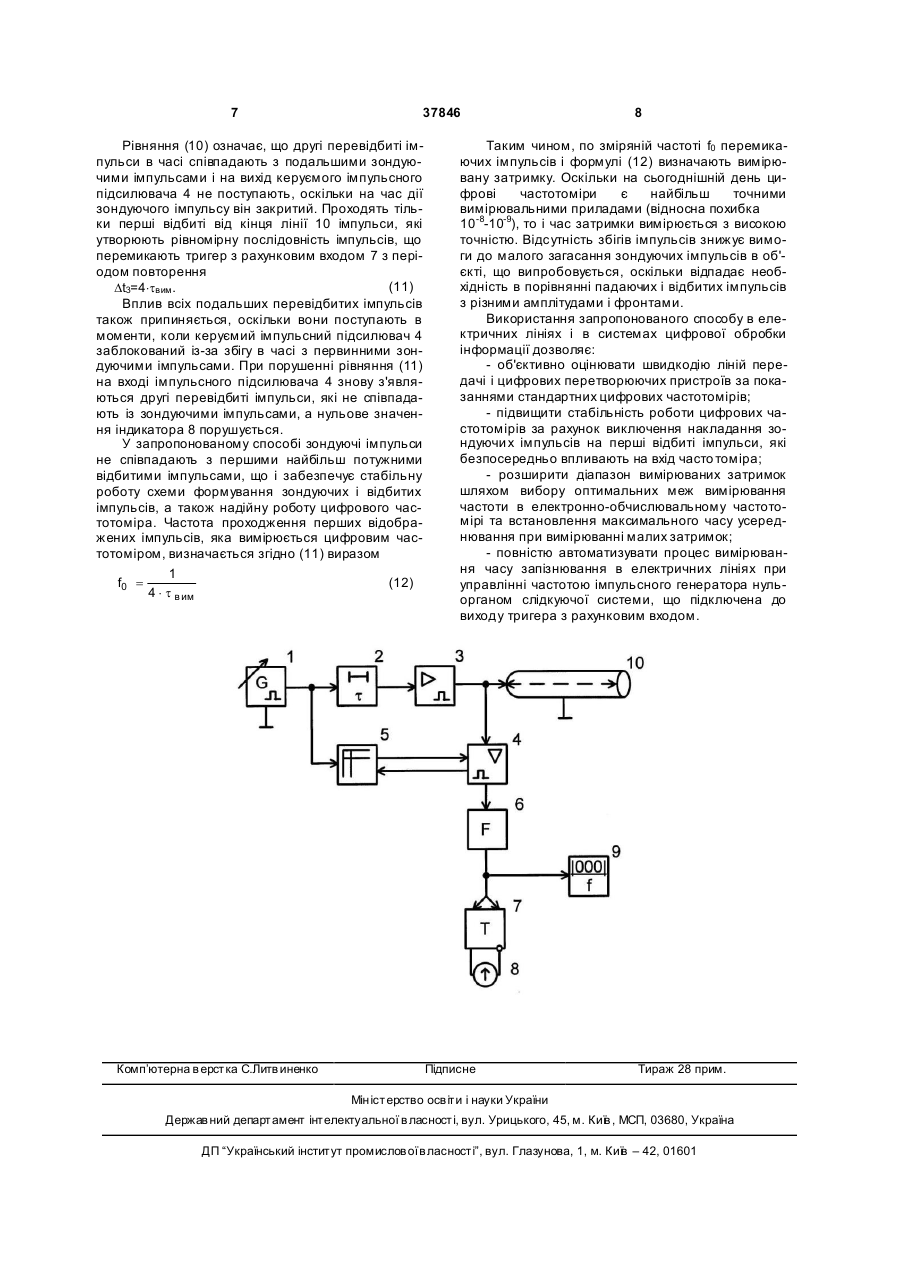
Спосіб вимірювання затримки електричних імпульсів, при якому подають послідовно із затримкою зондуючі імпульси на об'єкт, приймають на вході об'єкта зондуючі і відбиті імпульси, регулюють частоти проходження імпульсів і визначають затримку імпульсів, який відрізняється тим, що після прийняття зондуючих імпульсів на вході об' 3 37846 ня затримок, особливо малих, здійснюється з великими похибками. Відомий також спосіб вимірювання затримки електричних імпульсів [див. Скрипник Ю.О., Кузнецов О.Ю. Ре флектометричний прилад для визначення відстані до місця пошкодження електричних ліній передач. -Вісник КНУТД №1, 2002, с.155-158], при якому подають послідовно із затримкою зондуючі імпульси на об'єкт, приймають на вході об'єкту зондуючі і відбиті імпульси, регулюють частоти проходження імпульсів і визначають затримку імпульсів. Крім того, відомий спосіб включає операцію регулювання частоти зондуючих імпульсів до збігу зондуючих імпульсів з відбитими, формування рівномірної послідовності імпульсів із зондуючих і відбитих імпульсів і визначення вимірюваної затримки імпульсів по формулі 1 tвим = 2 × fз де fз - частота проходження зондуючих імпульсів при співпаданні їх з попередньо відбитими. В цьому способі знижується точність вимірювання затримки із-за похибок у визначенні моментів збігу широких відбитих імпульсів з вузькими зондуючими. В результаті накладання порівнюваних імпульсів і їх інтерференції виникають збої у формуванні чергового зондуючого імпульсу і великі випадкові похибки у визначенні частоти проходження послідовності імпульсів. Візуальна індикація співпадання на екрані осцилографу ускладнює процес автоматизації вимірювань і вимагає високої кваліфікації оператора. Співпадаючі імпульси не мають чітких фронтів, що також знижує достовірність вимірювань. В основу корисної моделі покладена задача створити такий спосіб вимірювання затримки електричних імпульсів, в якому шляхом введення нових операцій з імпульсними сигналами досягалося би виключення впливу співпадіння відбитих і зондуючи х імпульсів на результат вимірювання частоти інших не співпадаючих імпульсів, а нова розрахункова формула дозволила б визначати затримку по не співпадаючим імпульсам, що забезпечує підвищення точності вимірювання затримки електричних імпульсів. Поставлена задача досягається тим, що в способі вимірювання затримки електричних імпульсів, при якому подають послідовно із затримкою зондуючі імпульси на об'єкт, приймають на вході об'єкту зондуючі і відбиті імпульси, регулюють частоти проходження імпульсів і визначають затримку імпульсів, згідно з корисною моделлю, після прийняття зондуючих імпульсів на вході об'єкту їх блокують в послідовності імпульсів, отримують додатковий перевідбитий імпульс, порівнюють часові інтервали між першим відбитим і першим перевідбитим імпульсами та між першим перевідбитим і другим відбтим імпульсами, регулювання частоти проходження зондуючи імпульсів здійснюють до вирівнювання часових інтервалів, що порівнюються, вимірюють її, а затримку імпульсів визначають за формулою: 4 1 tвим = 4 × f0 де f0 - частота проходження перших відбитих імпульсів при збігу др уги х перевідбитих імпульсів із зондуючими імпульсами. Саме введення в спосіб вимірювання затримки електричних імпульсів таких нових операцій, як блокування в послідовності імпульсів, що приймається, зондуючих імпульсів, порівняння часового інтервалу між першим відбитим імпульсом і другим перевідбитим імпульсом з часовим інтервалом між другим перевідбитим імпульсом і подальшим першим відбитим імпульсом виключає ефект накладання зондуючих імпульсів на перші відбиті імпульси. Регулювання частоти проходження зондуючих імпульсів до вирівнювання інтервалів, що порівнюються, приводить до збігу у часі зондуючих імпульсів з другими перевідбитими імпульсами. Але схемотехнічне блокування зондуючих імпульсів в послідовності імпульсів, що приймається, обумовлює блокування і других перевідбитих імпульсів. В результаті послідовність імпульсів, що приймається, складається тільки з перших відбитих імпульсів і стає рівномірною, частота проходження імпульсів в якій кратна вимірюваній затримці. Вимірювання частоти проходження рівномірної послідовності неспівпадаючих імпульсів дозволяє з високою точністю вимірювати затримку імпульсів в лініях передачі і інших об'єктах із запізнюванням. На кресленні приведена функціональна схема пристрою, що дозволяє реалізувати запропонований спосіб вимірювання затримки електричних імпульсів. Схема включає генератор імпульсів 1 регульованої частоти, блок часової затримки 2, імпульсний підсилювач потужності 3, імпульсний підсилювач 4, що керується, блок управління 5, формувач імпульсів 6, тригер 7 з рахунковим входом, нуль-індикатор 8, цифровий частотомір 9. Позицією 10 позначений досліджуваний об'єкт у вигляді відрізка електричної лінії передачі, яка не узгоджена по входу і ви ходу. Спосіб здійснюється таким чином. За допомогою генератора імпульсів 1 подають послідовно зондуючі імпульси (відеоімпульси) на об'єкт, які затримуються блоком часової затримки 2 (наприклад, одновібратором) і посилюються імпульсним підсилювачем потужності 3. Підсилені імпульси потрапляють на вхід імпульсного підсилювача 4, що керується, блок управління 5, який підключений безпосередньо до виходу генератора імпульсів 1. Затримка блоку часової затримки 2 вибрана рівною часу спрацювання блоку управління 5. Після часової затримки, на час спрацьовування блоку 5, вихідний сигнал блоку управління 5 поступає на керуючий вхід імпульсного підсилювача 4 і закриває його. Тому, коли затриманий блоком часової затримки 2 і посилений імпульсним підсилювачем потужності 3 відеоімпульс попадає на вхід імпульсного підсилювача 4, що керується, він не проходить на його вихід. Час блокування імпульсного підсилювача 4, що керується, вибирають більшим 5 37846 тривалості самого відеоімпульсу і часу затримки імпульсного підсилювача потужності 3. Таким чином, вхідні відеоімпульси, якими зондують досліджувану лінію 10, не проходять на імпульсний підсилювач 4. Зондуючі імпульси поступають в неузгоджену лінію 10 і відбиваються від її входу, але не проходять крізь закритий імпульсний підсилювач 4, що керується, при цьому відбувається прийняття на вході об'єкту зондуючи х і відбити х імпульсів. Відбиті імпульси від кінця неузгодженої лінії поступають на вхід імпульсного підсилювача 4, що керується, коли він вже відкритий. З прийнятих відбитих імпульсів, які розширені із-за реактивних параметрів і електричних втрат в досліджуваній лінії 10, формувачем імпульсів 6 створюються короткі імпульси, що поступають на рахунковий вхід тригера 7. Відбитий імпульс у свою чергу відбивається від входу не узгодженої лінії 10, проходить її, відбивається від її кінця і знов повертається на вхід досліджуваної лінії 10 з ослабленою амплітудою. Перевідбитий імпульс посилюється імпульсним підсилювачем 4, що керується, з якого формувачем імпульсів 6 створюється також короткий імпульс, який поступає на вхід тригера 7. Таким чином, в послідовності відеоімпульсів, що поступають, імпульсним підсилювачем 4, що керується, з блоком управління 5, блокуються зондуючі імпульси і пропускаються перший відбитий від кінця лінії 10 імпульс і другий відбитий від входу і перевідбитий від кінця лінії 10 імпульси. Поріг спрацьовування формувача імпульсів 6 встановлюють таким, щоб перевідбиті імпульси, що поступають, з більш ослабленою амплітудою блокувалися б цим формувачем. Короткі відеоімпульси формувача імпульсів 6 перемикають тригер 7 з рахунковим входом з частотою відбитих імпульсів, що поступають на його вхід. На прямому і інверсному виходах тригера 7 з рахунковим входом формуються прямокутні імпульси, амплітуди яких мають різний знак. Довжина імпульсу однієї полярності визначається часовим інтервалом між перемикаючими імпульсами, а тривалість імпульсу іншої полярності - паузою до приходу чергового перемикаючого імпульсу. Нуль-індикатор 8 реагує на різницю тривалості перемикаючих інтервалів і пауз. Регулюють частоту проходження імпульсів генератора 1: зміною співвідношення тривалості перемикаючих інтервалів і пауз між ними можна добитися нульового значення нуль-індикатора. Співвідношення довжини перемикаючих інтервалів залежить від значення затримки в досліджуваному об'єкті і частоти проходження зондуючих імпульсів. Частота проходження перемикаючих імпульсів вимірюється цифровим частотоміром 9, підключеним безпосередньо до виходу формувача імпульсів 6. Якщо зондуючий імпульс, що генерується з частотою f1 , впливає на об'єкт у вигляді відрізка лінії 10 у момент часу t1, то перший відображений від кінця лінії імпульс з'явиться на вході лінії у момент часу: (1) t 2 = t 1 + 2 × t в им, де tвим - вимірювана затримка об'єкту. 6 Другий перевідбитий імпульс з'явиться на вході лінії в момент (2) t 3 = t 2 + 2 × t вим , . Подальші перевідбиті імпульси з'являтимуться через час 2×tвим . Наступний зондуючий імпульс поступає на вхід лінії 10 через період генерування, тобто у момент часу: 1 t 4 = t1 + . (3) f1 Відбиті імпульси від дії наступного зондуючого імпульсу з'являться в наступні моменти часу: (4) t 5 = t 4 + 2 × t вим , (5) t 6 = t 5 + 2 × t вим . На тригер з рахунковим входом 7 будуть впливати імпульси переключення в моменти часу t2 i t3, t5 i t 6 з інтервалом (6) Dt1 = t 3 - t 2 = t 6 - t 5 = 2 × t вим і паузою 1 Dt 2 = - D t1. (7) f1 Порівнюють часові інтервали між першим відбитим і першим перевідбитим імпульсами та між першим перевідбитим і другим відбитим імпульсами. В цьому випадку напруги на прямому і інверсному виходах тригера 7 з рахунковим входом будуть несиметричними з тривалістю D t1 і D t2. Нуль-індикатор 8 зафіксує нерівність середніх значень струмів імпульсів зсувом покажчика з нульової відмітки. Регулюють частоту проходження імпульсів до значення f2, при якій покази нуль-індикатора 8 будуть наближатися до нульової відмітки. Однак при підході до нуля покажчика нульоргану другий перевідбитий імпульс почне співпадати з наступним зондуючим імпульсом. В момент співпадіння імпульсів проходження перевідбитих імпульсів крізь керуємий імпульсний підсилювач 4 зупиниться, оскільки він буде закритий зондуючими імпульсами. Однак на рахунковий вхід тригера 7 продовжують поступати перші перевідбиті імпульси. В момент співпадання зондуючих імпульсів з другими перевідбитими імпульсами перші відбиті імпульси починають слідувати рівномірно з частотою зондуючи імпульсів, що фіксується нульовим покажчиком індикатора 8, що відображає рівномірність в часі перемикаючих імпульсів. Цій умові відповідає рівність інтервалів D t1 і D t2. З рівнянь (6) і (7) виходить 1 - Dt 1 = t 3 - t 2 . (8) f1 Підставляючи у вираз (8) значення (1) і (2), отримаємо 1 - 2 × t вим = 2 × t вим . (9) f1 Із виразу (9) остаточно отримаємо значення вимірюємої затримки 1 . tвим = (10) 4 × f2 7 37846 Рівняння (10) означає, що другі перевідбиті імпульси в часі співпадають з подальшими зондуючими імпульсами і на вихід керуємого імпульсного підсилювача 4 не поступають, оскільки на час дії зондуючого імпульсу він закритий. Проходять тільки перші відбиті від кінця лінії 10 імпульси, які утворюють рівномірну послідовність імпульсів, що перемикають тригер з рахунковим входом 7 з періодом повторення (11) Dt3=4×tвим . Вплив всіх подальших перевідбитих імпульсів також припиняється, оскільки вони поступають в моменти, коли керуємий імпульсний підсилювач 4 заблокований із-за збігу в часі з первинними зондуючими імпульсами. При порушенні рівняння (11) на вході імпульсного підсилювача 4 знову з'являються другі перевідбиті імпульси, які не співпадають із зондуючими імпульсами, а нульове значення індикатора 8 порушується. У запропонованому способі зондуючі імпульси не співпадають з першими найбільш потужними відбитими імпульсами, що і забезпечує стабільну роботу схеми формування зондуючих і відбитих імпульсів, а також надійну роботу цифрового частотоміра. Частота проходження перших відображених імпульсів, яка вимірюється цифровим частотоміром, визначається згідно (11) виразом 1 f0 = (12) 4 × t в им Комп’ютерна в ерстка С.Литв иненко 8 Таким чином, по зміряній частоті f0 перемикаючих імпульсів і формулі (12) визначають вимірювану затримку. Оскільки на сьогоднішній день цифрові частотоміри є найбільш точними вимірювальними приладами (відносна похибка 10-8-10-9), то і час затримки вимірюється з високою точністю. Відсутність збігів імпульсів знижує вимоги до малого загасання зондуючих імпульсів в об'єкті, що випробовується, оскільки відпадає необхідність в порівнянні падаючих і відбитих імпульсів з різними амплітудами і фронтами. Використання запропонованого способу в електричних лініях і в системах цифрової обробки інформації дозволяє: - об'єктивно оцінювати швидкодію ліній передачі і цифрових перетворюючих пристроїв за показаннями стандартних цифрових частотомірів; - підвищити стабільність роботи цифрових частотомірів за рахунок виключення накладання зондуючи х імпульсів на перші відбиті імпульси, які безпосередньо впливають на вхід часто томіра; - розширити діапазон вимірюваних затримок шляхом вибору оптимальних меж вимірювання частоти в електронно-обчислювальному частотомірі та встановлення максимального часу усереднювання при вимірюванні малих затримок; - повністю автоматизувати процес вимірювання часу запізнювання в електричних лініях при управлінні частотою імпульсного генератора нульорганом слідкуючої системи, що підключена до виходу тригера з рахунковим входом. Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for electric pulses delay meassuring
Автори англійськоюSkrypnyk Yurii Oleksiiovych, Sannikov Volodymyr Yuriiovych
Назва патенту російськоюСпособ измерения задержки электрических импульсов
Автори російськоюСкрипник Юрий Алексеевич, Санников Владимир Юрьевич
МПК / Мітки
МПК: H03K 5/19
Мітки: спосіб, затримки, вимірювання, імпульсів, електричних
Код посилання
<a href="https://ua.patents.su/4-37846-sposib-vimiryuvannya-zatrimki-elektrichnikh-impulsiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання затримки електричних імпульсів</a>
Спосіб визначення швидкості поширення електричних імпульсів у електричних лініях зв’язку
Номер патенту: 35262
Опубліковано: 10.09.2008
Автори: Скрипник Юрій Олексійович, Кузнєцов Олександр Юрійович, Ніколаєв Андрій Володимирович
МПК: H04B 3/46
Мітки: спосіб, поширення, визначення, швидкості, електричних, зв'язку, лініях, імпульсів
Формула / Реферат:
Спосіб визначення швидкості поширення електричних імпульсів у електричних лініях зв'язку, при якому підключають випробувану лінію до виходу кільцевого генератора імпульсів, збуджують його пусковим імпульсом, отриманий імпульс посилають у випробувану лінію, приймають відбитий імпульс і ним знову збуджують по кільцю генератор імпульсів, формують періодичну послідовність зондувальних імпульсів, вимірюють частоту проходження зондувальних...
Спосіб вимірювання різниці часу затримки вузькосмугового радіосигналу з обмеженим інтервалом кореляції та пристрій для його здійснення
Номер патенту: 66378
Опубліковано: 17.05.2004
Автори: Клепфер Євген Іванович, Антонюк Володимир Павлович, Григор'єва Людмила Володимирівна
МПК: G01S 5/00, G01S 13/06, G01S 13/42
Мітки: радіосигналу, кореляції, інтервалом, різниці, затримки, вимірювання, здійснення, спосіб, вузькосмугового, обмеженим, часу, пристрій
Формула / Реферат:
1. Спосіб вимірювання різниці часу затримки вузькосмугового радіосигналу з обмеженим інтервалом кореляції, оснований на визначенні попереднього наближення різниці затримки сигналу по максимуму огинаючої взаємної кореляційної функції з подальшим уточненням результату по даних вимірювання фази в точці попереднього наближення, який відрізняється тим, що в умовах апріорної невизначеності несучої частоти сигналу, одночасно з вимірюванням фази...
Пристрій затримки прямокутних імпульсів керований напругою
Номер патенту: 34652
Опубліковано: 15.03.2001
Автор: Пшеюк Сергій Іванович
МПК: H03K 5/13
Мітки: керований, пристрій, прямокутних, напругою, імпульсів, затримки
Формула / Реферат:
Пристрій затримки прямокутних імпульсів, керований напругою, який містить перший і другий одновібратори, входи яких з'єднані з вхідною шиною, трьохвходовий мажоритарний елемент, вихід якого є виходом пристрою, а перший вхід з'єднано з інверсним виходом першого одновібратора, підключеного своїм входом до другого входу мажоритарного елемента і через другий одновібратор до третього входу мажоритарного елемента, який відрізняється тим, що...
Пристрій для вимірювання тривалості імпульсів
Номер патенту: 75490
Опубліковано: 17.04.2006
Автори: Антонюк Володимир Павлович, Іванов Володимир Іванович, Клєпфер Євген Іванович, Проць Богдан Іванович
МПК: G01R 29/02, G04F 10/00
Мітки: тривалості, вимірювання, імпульсів, пристрій
Формула / Реферат:
Пристрій для вимірювання тривалості імпульсів, що містить масштабний амплітудний перетворювач та перший і другий компаратори, який відрізняється тим, що в нього введені фіксатор нижнього рівня, фільтр, перший і другий елементи часової затримки та елемент логічного множення, вихід якого є виходом пристрою, перший вхід з'єднаний з виходом першого компаратора, а другий вхід - з виходом другого компаратора, перший вхід якого з'єднаний з першим...
Пристрій для вимірювання часу затримки фази оптичного випромінювання
Номер патенту: 53712
Опубліковано: 17.02.2003
Автори: Рудик Андрій Вікторович, Барановський Ігор Васильович
МПК: G01J 7/00, G01N 21/00, G01R 25/00, G01J 9/00
Мітки: фазі, вимірювання, оптичного, часу, затримки, пристрій, випромінювання
Формула / Реферат:
Пристрій для вимірювання часу затримки фази оптичного випромінювання, що містить лазер, оптично зв’язаний з напівпрозорим дзеркалом, першу та другу лінзи узгодження, зв'язані між собою за допомогою досліджуваного волоконного світловоду, перше відбивальне дзеркало, перший і другий фотоприймачі та цифровий фазометр, який відрізняється тим, що в нього введені друге та трете відбивальні дзеркала, третя та четверта лінзи узгодження, перший та...
Попередній патент: Автонапувалка періодичного регулювання висоти
Наступний патент: Пристрій для світлолікування у важкодоступних порожнинах
Випадковий патент: Пристрій для вимірювання напруженості магнітного поля