Спостерігаючий прилад
Текст
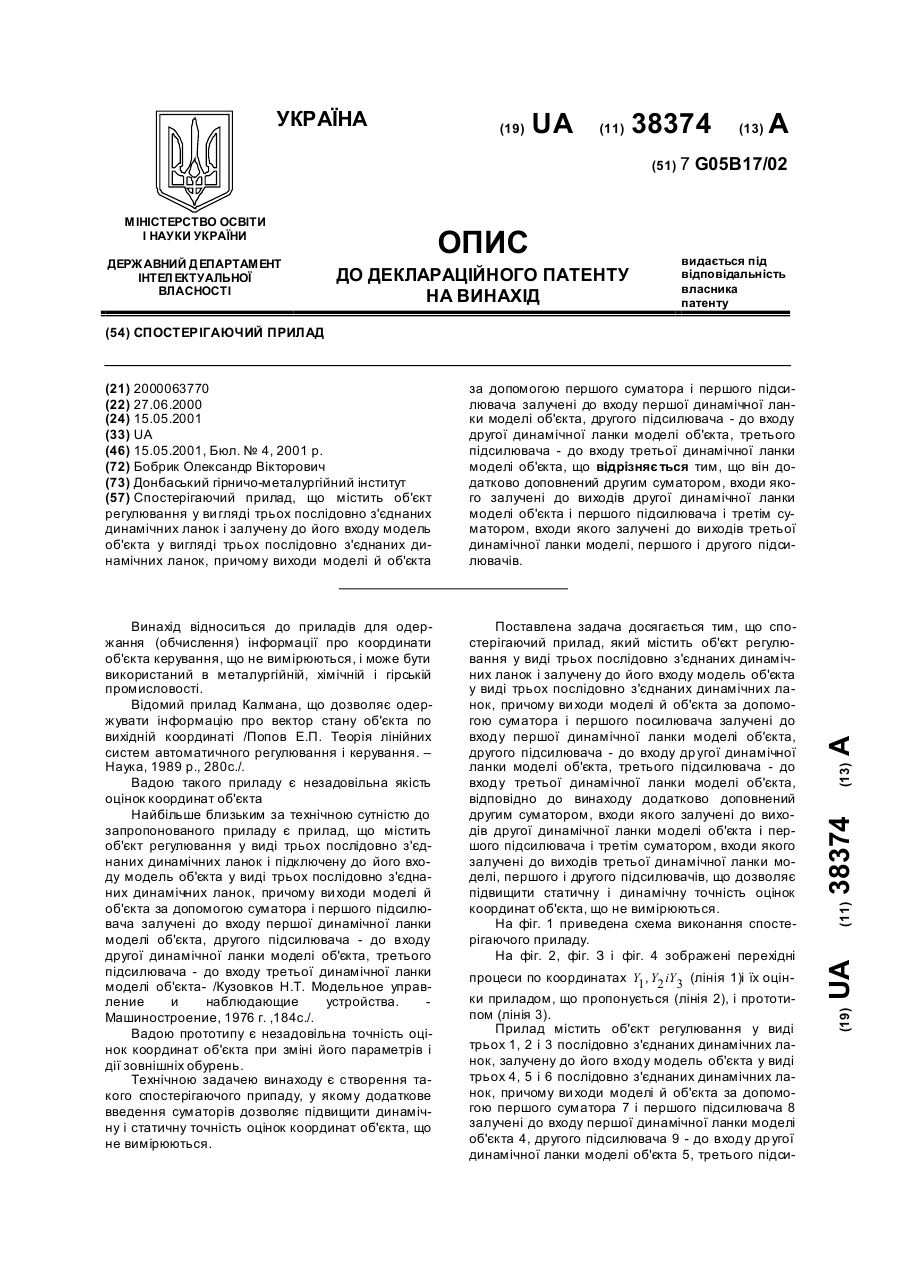
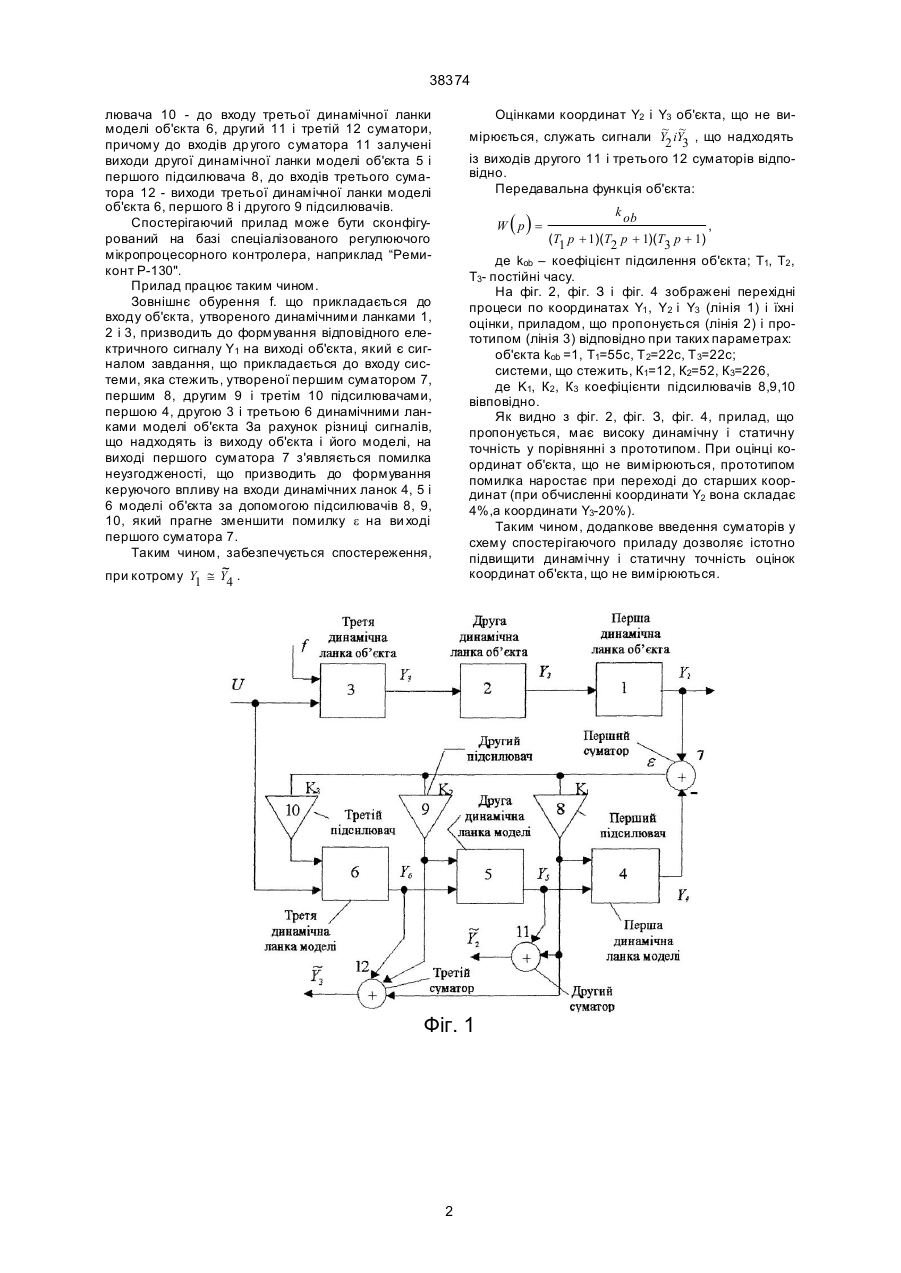
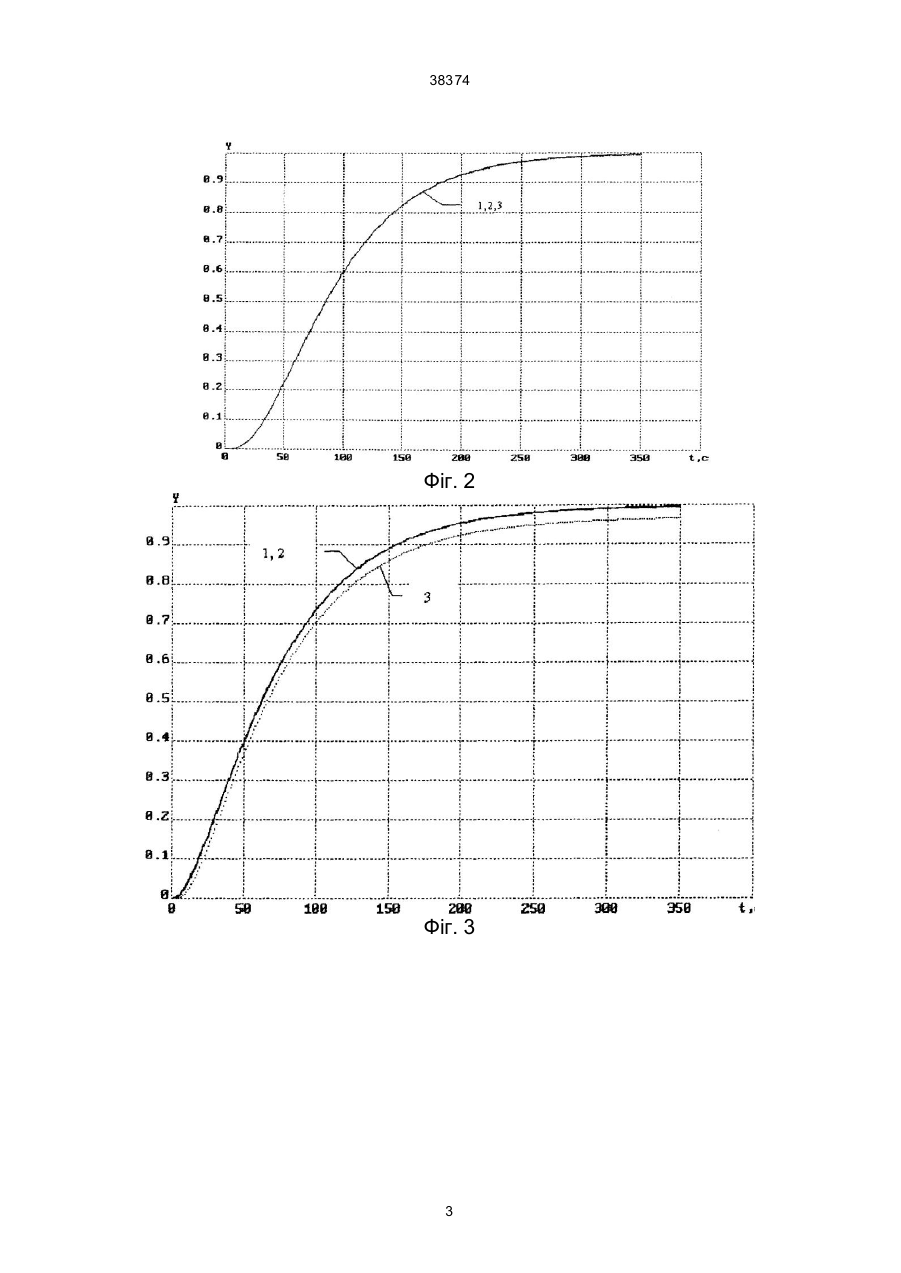
Спостерігаючий прилад, що містить об'єкт регулювання у ви гляді трьох послідовно з'єднаних динамічних ланок і залучену до його входу модель об'єкта у вигляді трьох послідовно з'єднаних динамічних ланок, причому виходи моделі й об'єкта 38374 лювача 10 - до входу третьої динамічної ланки моделі об'єкта 6, другий 11 і третій 12 суматори, причому до входів др угого суматора 11 залучені виходи другої динамічної ланки моделі об'єкта 5 і першого підсилювача 8, до входів третього суматора 12 - виходи третьої динамічної ланки моделі об'єкта 6, першого 8 і другого 9 підсилювачів. Спостерігаючий прилад може бути сконфігурований на базі спеціалізованого регулюючого мікропроцесорного контролера, наприклад “Ремиконт Р-130". Прилад працює таким чином. Зовнішнє обурення f. що прикладається до входу об'єкта, утвореного динамічними ланками 1, 2 і 3, призводить до формування відповідного електричного сигналу Y1 на виході об'єкта, який є сигналом завдання, що прикладається до входу системи, яка стежить, утвореної першим суматором 7, першим 8, другим 9 і третім 10 підсилювачами, першою 4, другою 3 і третьою 6 динамічними ланками моделі об'єкта За рахунок різниці сигналів, що надходять із виходу об'єкта і його моделі, на виході першого суматора 7 з'являється помилка неузгодженості, що призводить до формування керуючого впливу на входи динамічних ланок 4, 5 і 6 моделі об'єкта за допомогою підсилювачів 8, 9, 10, який прагне зменшити помилку e на ви ході першого суматора 7. Таким чином, забезпечується спостереження, ~ при котрому Y1 @ Y4 . Оцінками координат Y2 i Y3 об'єкта, що не ви~ ~ мірюється, служать сигнали Y2 iY3 , що надходять із виходів другого 11 і третього 12 суматорів відповідно. Передавальна функція об'єкта: ( ) W p = k ob (T1 p + 1)(T2 p + 1)(T3 p + 1) , де kob – коефіцієнт підсилення об'єкта; Т1, Т2 , Т3- постійні часу. На фіг. 2, фіг. З і фіг. 4 зображені перехідні процеси по координатах Y1 , Y2 i Y3 (лінія 1) і їхні оцінки, приладом, що пропонується (лінія 2) і прототипом (лінія 3) відповідно при таких параметрах: об'єкта kob =1, Т1=55с, Т 2=22с, Т 3=22с; системи, що стежить, К1=12, К2=52, К3=226, де K1, К2 , К3 коефіцієнти підсилювачів 8,9,10 вівповідно. Як видно з фіг. 2, фіг. З, фіг. 4, прилад, що пропонується, має високу динамічну і статичну точність у порівнянні з прототипом. При оцінці координат об'єкта, що не вимірюються, прототипом помилка наростає при переході до старших координат (при обчисленні координати Y2 вона складає 4%,а координати Y3-20%). Таким чином, додаnкове введення суматорів у схему спостерігаючого приладу дозволяє істотно підвищити динамічну і статичну точність оцінок координат об'єкта, що не вимірюються. Фіг. 1 2 38374 Фіг. 2 Фіг. 3 3 38374 Фіг. 4 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 4
ДивитисяДодаткова інформація
Назва патенту англійськоюDetecting instrument
Автори англійськоюBobryk Oleksandr Viktorovych
Назва патенту російськоюСледящий прибор
Автори російськоюБобрик Александр Викторович
МПК / Мітки
МПК: G05B 17/00
Мітки: спостерігаючий, прилад
Код посилання
<a href="https://ua.patents.su/4-38374-sposterigayuchijj-prilad.html" target="_blank" rel="follow" title="База патентів України">Спостерігаючий прилад</a>
Прилад для фізіотерапії низькоінтенсивним електромагнітним випромінюванням
Номер патенту: 569
Опубліковано: 15.09.2000
Автори: Чухраєв Микола Вікторович, Писанко Олег Іванович, Самосюк Іван Захарович, Самосюк Наталія Іванівна, Чухраєва Олена Миколаївна
МПК: A61N 5/00, A61H 39/00
Мітки: електромагнітним, фізіотерапії, прилад, випромінюванням, низькоінтенсивним
Формула / Реферат:
Прилад для фізіотерапії низькоінтенсивним електромагнітним випромінюванням (ЕМВ), що містить субблоки живлення, контролю, керування і модулятор, об'єднані у блок живлення, контролю, керування і модуляції (ЖКК), та з'єднаний з блоком ЖКК випромінювач електромагнітних хвиль (ЕМХ) портативний міліметрових хвиль, обладнаний випромінювачем-антеною, який відрізняється тим, що блок ЖКК доповнений таймером на два діапазони часу процедур на 1-99 с та...
Прилад керування стрільбою зенітної артилерії
Номер патенту: 10708
Опубліковано: 25.12.1996
Автори: Кожура Віталій Васильович, Барінгольц Тетяна Володимирівна, Півняк Сергій Степанович
МПК: F41G 3/08, G06F 15/00
Мітки: зенітної, прилад, керування, стрільбою, артилерії
Формула / Реферат:
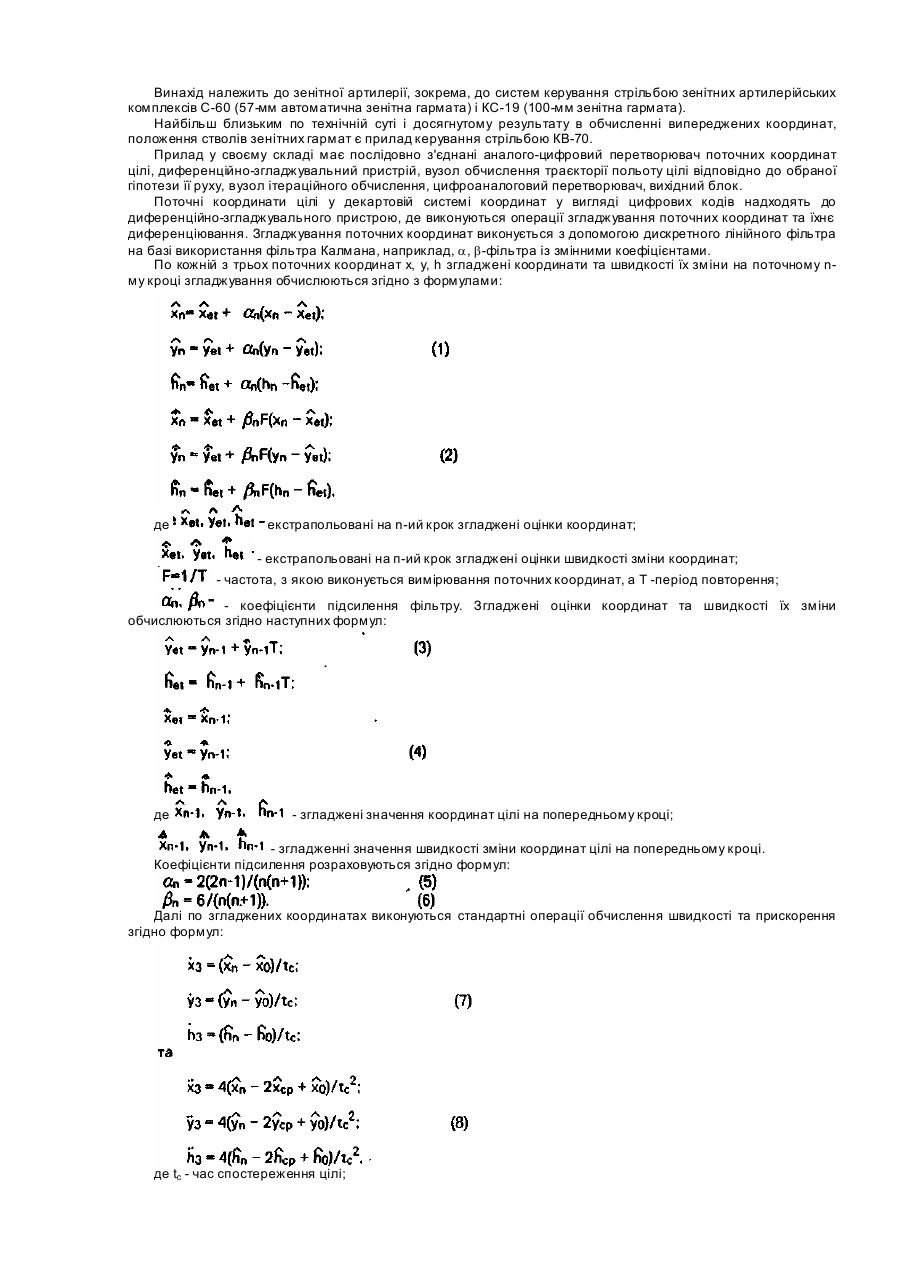
Прилад керування стрільбою зенітної артилерії, який має послідовно з'єднані аналого-цифровий перетворювач поточних координат цілі, диференційно-згладжувальний пристрій, вузол обчислення траєкторії польоту цілі відповідно до обраної гіпотези її руху, вузол ітераційного обчислення, цифро-аналоговий перетворювач і вихідний блок, який відрізняється тим, що до нього введені вузол запам'ятовування значень коефіцієнтів, вузол обчислення...
Двоконтурний вітроелектричний прилад
Номер патенту: 30272
Опубліковано: 15.11.2000
Автор: Сідорюк Юрій Леонідович
МПК: F03D 1/00
Мітки: вітроелектричний, прилад, двоконтурний
Формула / Реферат:
Двоконтурний вітроелектричний прилад, містить вітродвигун, електрогенератор, відрізняється тим, що вітродвигуни з лопатами криловими, циліндричними встановлені на валу статора і на проходячому через нього валу ротора.
Прилад для остеосинтезу
Номер патенту: 30381
Опубліковано: 15.11.2000
Автори: Матьокін Олексій Володимирович, Родзін Олександр Олексійович, Самохін В'ячеслав Олексійович, Кривенко Сергій Миколайович
МПК: A61F 5/00, A61B 17/58
Мітки: прилад, остеосинтезу
Формула / Реферат:
Прилад для остеосинтезу, що містить Г-подібну пластину та пробійник, який відрізняється тим, що прилад містить спицю-направник з градуйованою шкалою, пробійник має площадку у вигляді виступу біля основи і має наскрізний канал, розташований по центральній осі, а клинок Г-подібної пластини має дві спрямовуючі, розташовані біля основи і кінцевої частини клинка.
Прилад для ввімкнення електромагнітного реле змінного струму
Номер патенту: 30997
Опубліковано: 15.12.2000
Автор: Ткачов Анатолій Іванович
МПК: H01F 7/08
Мітки: реле, змінного, електромагнітного, струму, прилад, ввімкнення
Текст:
...реле змінного струму відрізняється ВІД прототипа ТИМ, ЩО В НЬОГО введени третій резистор і оптрон, який містить пару свїтлодіод-фототирйор. При цьому анод та катод фототиристора оптрона підключені паралельно першому резистору. Емітер першого транзистора через другий резистор з'єднай з першим виводом для підключення джерела живлення. Колектор через світлодіод оптрона підключен до колектору другого транзистора, емітер якого з'єднай з...
Попередній патент: Спосіб формування коротких імпульсів
Наступний патент: Спосіб вилучення золота
Випадковий патент: Спосіб прогнозування шкоди здоров'ю працюючого населення від впливу техногенних хімічних факторів металургійного виробництва