Пристрій адаптивного управління порогом вимірювання амплітуди вхідного потоку сигналів
Номер патенту: 38860
Опубліковано: 15.05.2001
Автори: КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Мокеєв Юрій Геннадійович, Рябкін Юрій Вікторович, Марченко Василь Васильович, Немчин Олександр Федорович
Формула / Реферат
(21) 2000116221 Дата прийняття
(54) (57) рішення
16 березня 2001 р.
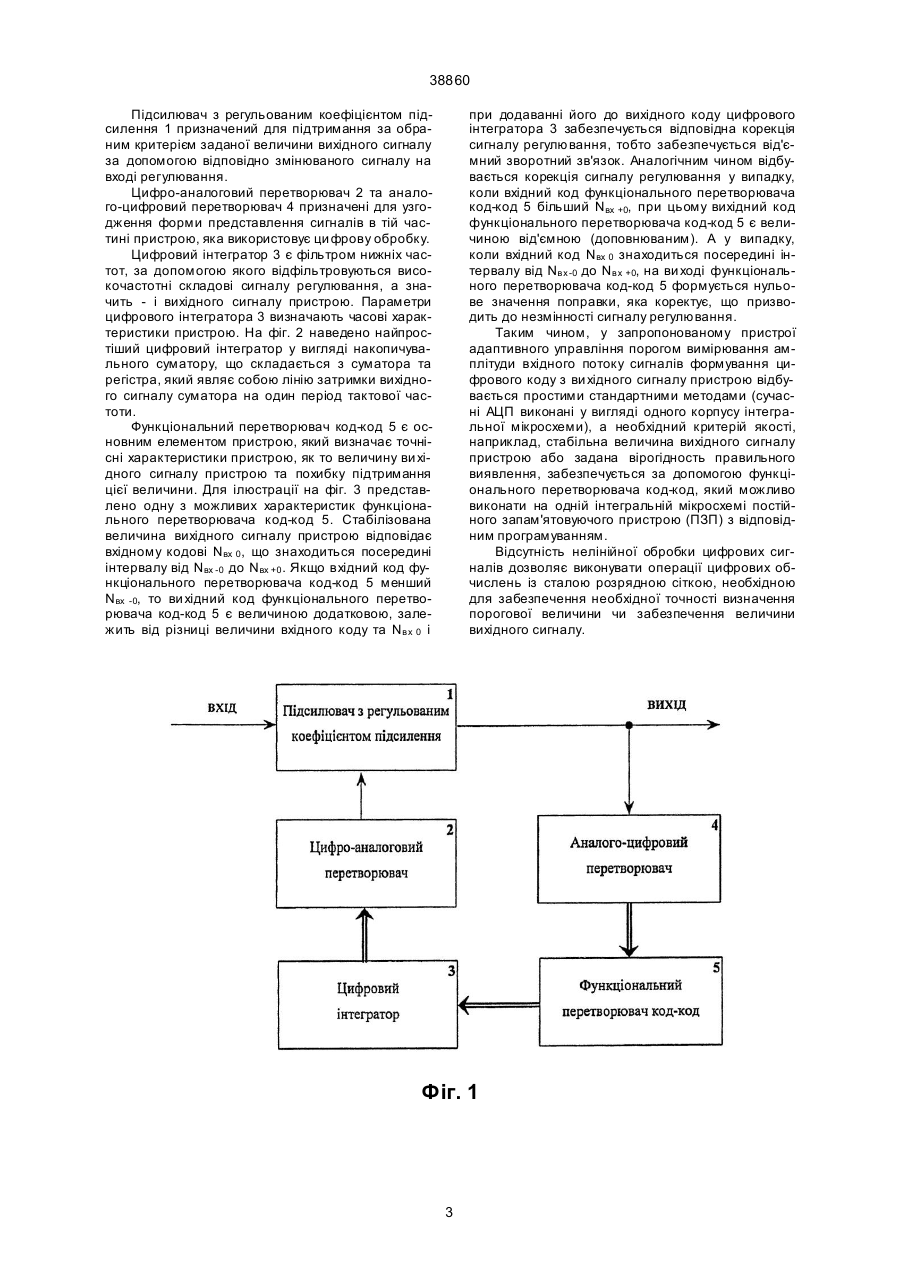
Пристрій адаптивного управління порогом вимірювання амплітуди вхідного потоку сигналів, що містить підсилювач з регульованим коефіцієнтом підсилення, вхід якого є входом пристрою, а вихід - виходом пристрою, цифро-аналоговий перетворювач, вихід якого з'єднаний з входом регулювання підсилювача з регульованим коефіцієнтом підсилення, цифровий інтегратор, вихід якого з'єднаний з входом цифро-аналогового перетворювача, який відрізняється тим, що вихід підсилювача з регульованим коефіцієнтом підсилення підключений до послідовно з'єднаних аналого-цифрового перетворювача і функціонального перетворювача код-код, вихід функціонального перетворювача код-код підключений до входу інтегратора.
Текст
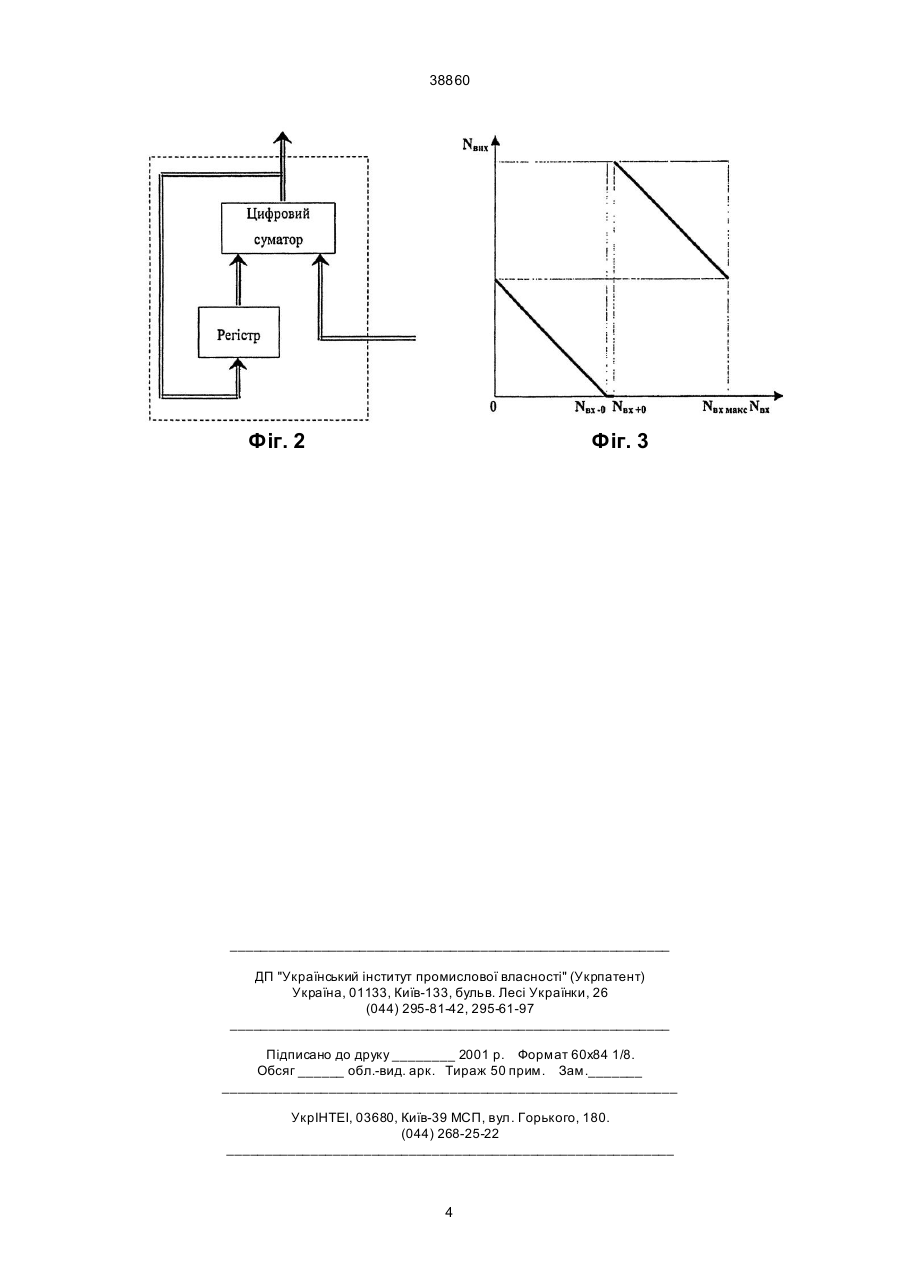
Пристрій адаптивного управління порогом вимірювання амплітуди вхідного потоку сигналів, що містить підсилювач з регульованим коефіцієн 38860 вихідних си гналів подільника та першого пікового детектора, компаратор, що порівнює вихідний сигнал другого пікового детектора з пороговим рівнем, комутатор, що управляється вихідним сигналом компаратора і пропускає на вихід або сигнал першого пікового детектора, або вихідний сигнал перемножувала, та схема регулювання робочої точки та напруги живлення вихідного каскаду підсилювача. Дана схема використовує, по-перше, лінію затримки, що зменшує величину перехідного процесу регулювання; по-друге, використовує як керуючий - і вихідний сигнал, тобто, побудована як система регулювання із зворотним зв'язком, що поліпшує якість регулювання коефіцієнтом передачі підсилювача. Недоліками такої системи автоматичного регулювання підсилення є її складність, невеликий динамічний діапазон вхідних сигналів, зумовлений обмеженістю діапазону вихідних сигналів подільника, а також низька точність стабілізації амплітуди вихідного сигналу системи автоматичного регулювання підсилення при обробці імпульсних вхідних сигналів з тривалістю, що порівняна з величиною затримки сигналу в лінії затримки. Найбільш близьким за суттю до пристрою, що пропонується, є пристрій автоматичного регулювання підсилення (Пат. Росії, № 2022451, МПК5 H03G3/20, 1994), що містить підсилювач з регульованим коефіцієнтом підсилення, вимірювач дисперсії, який приєднаний до виходу підсилювача з регульованим коефіцієнтом підсилення, N компараторів, інформаційні входи яких з'єднані з виходом вимірювача дисперсії, а на опорні входи заведено порогові сигналі, обрані певним чином, перетворювач кодів, цифровий інтегратор та цифро-аналоговий перетворювач (ЦАП). Пристрій автоматичного регулювання підсилення працює наступним чином. На вхід підсилювача з регульованим коефіцієнтом підсилення надходить сигнал U1 і з його виходу надходить на блок оцінки дисперсії. Цей сигнал являє собою адитивну суміш га усового шум у і імпульсної завади. Сигнал U2 на виході вимірювача дисперсії, який відповідає оціночному значенню дисперсії вхідного сигналу U1, надходить на інформаційні входи N компараторів. На опорні входи компараторів заведені порогові напруги Uoпi , які розділяють динамічний діапазон сигналу U2 на (N+1) зону, причому, завдяки нерівномірному розташуванню порогових напруг Uoпi, можливо досягнути такої апроксимації функції у = f(U2), що буде досягнутий деякий критерій якості, наприклад, вірогідність пропуску імпульсного сигналу або стабільна дисперсія сигналу на виході пристрою. В залежності від величини сигналу U2 на ви ходах компараторів встановлюється N-розрядний позиційний код, який визначає зону динамічного діапазону знаходження сигналу U2. Перетворювач кодів переводить N-розрядний позиційний код зони в М-розрядний двійковий код ступеню регулювання, який надходить на цифровий інтегратор (накопичуючий суматор), що виконує операції додавання М-розрядного двійчастого коду ступеню регулювання до вихідного коду стану цифрового інтегратора попереднього циклу регулювання. У випадку, коли сумарний результат ви ходить за максимальне чи мінімальне граничні значення, вихідний код цифрового інтегратору встановлюється, відповідно, в максимальне чи мінімальне значення. Після проходження через ЦАП код цифрового інтегратора перетворюється в аналогову напругу регулювання, яка надходить на керуючий вхід підсилювача з регульованим коефіцієнтом підсилення та, відповідно, змінює його коефіцієнт підсилення. Пристрій-прототип успішно працює в умовах дії імпульсних завад, але до недоліків його слід віднести складність формування N-розрядного позиційного коду зони при обробці широкого динамічного діапазону, тому як при цьому N значно зростає, крім того, такий спосіб цифрового інтегрування призводить до постійної зміни коду на виході цифрового інтегратора, а значить - відсутності стабільного вихідного сигналу, навіть при постійному вхідному сигналові. В основу винаходу поставлено задачу створення пристрою адаптивного управління порогом вимірювання амплітуди вхідного потоку сигналів, в якому забезпечено спрощення практичної реалізації, поліпшення точності стабілізації амплітуди вихідного сигналу. Це досягається тим, що у відомому пристрою адаптивного управління порогом вимірювання амплітуди вхідного потоку сигналів, що містить підсилювач з регульованим коефіцієнтом підсилення, вхід якого є входом пристрою, а вихід - виходом пристрою, цифро-аналоговий перетворювач, ви хід якого з'єднаний з входом регулювання підсилювача з регульованим коефіцієнтом підсилення, цифровий інтегратор, вихід якого з'єднаний з входом цифро-аналогового перетворювача, згідно з винаходом, вихід підсилювача з регульованим коефіцієнтом підсилення підключений до послідовно з'єднаних аналого-цифрового перетворювача і функціонального перетворювача код-код, вихід якого підключений до входу інтегратора. На фіг. 1 схематично зображений пристрій адаптивного управління порогом вимірювання амплітуди вхідного потоку сигналів, на фіг. 2 наведено приклад реалізації цифрового інтегратора, на фіг. 3 - один з можливих варіантів характеристики функціонального перетворювача код-код. Пристрій адаптивного управління порогом вимірювання амплітуди вхідного потоку сигналів складається з підсилювача з регульованим коефіцієнтом підсилення 1, цифро-аналогового перетворювача 2, цифрового інтегратора 3, аналогоцифрового перетворювача 4, функціонального перетворювача код-код 5, вхід підсилювача з регульованим коефіцієнтом підсилення 1 є входом пристрою, вхід регулювання підсилювача з регульованим коефіцієнтом підсилення 1 з'єднаний з виходом цифро-аналогового перетворювача 2, вихід підсилювача з регульованим коефіцієнтом підсилення 1 є виходом пристрою і з'єднаний з входом аналого-цифрового перетворювача 4, вихід аналого-цифрового перетворювача 4 з'єднаний з входом функціонального перетворювача код-код 5, вихід функціонального перетворювача код-код 5 з'єднаний з входом цифрового інтегратора 3, а вихід цифрового інтегратора З з'єднаний з входом цифро-аналогового перетворювача 2. 2 38860 Підсилювач з регульованим коефіцієнтом підсилення 1 призначений для підтримання за обраним критерієм заданої величини вихідного сигналу за допомогою відповідно змінюваного сигналу на вході регулювання. Цифро-аналоговий перетворювач 2 та аналого-цифровий перетворювач 4 призначені для узгодження форми представлення сигналів в тій частині пристрою, яка використовує ци фрову обробку. Цифровий інтегратор 3 є фільтром нижніх частот, за допомогою якого відфільтровуються високочастотні складові сигналу регулювання, а значить - і вихідного сигналу пристрою. Параметри цифрового інтегратора 3 визначають часові характеристики пристрою. На фіг. 2 наведено найпростіший цифровий інтегратор у вигляді накопичувального суматору, що складається з суматора та регістра, який являє собою лінію затримки вихідного сигналу суматора на один період тактової частоти. Функціональний перетворювач код-код 5 є основним елементом пристрою, який визначає точнісні характеристики пристрою, як то величину ви хідного сигналу пристрою та похибку підтримання цієї величини. Для ілюстрації на фіг. 3 представлено одну з можливих характеристик функціонального перетворювача код-код 5. Стабілізована величина вихідного сигналу пристрою відповідає вхідному кодові Nвx 0 , що знаходиться посередині інтервалу від Nвх -0 до Nвx +0 . Якщо вхідний код функціонального перетворювача код-код 5 менший Nвx -0, то ви хідний код функціонального перетворювача код-код 5 є величиною додатковою, залежить від різниці величини вхідного коду та Nвx 0 і при додаванні його до вихідного коду цифрового інтегратора 3 забезпечується відповідна корекція сигналу регулювання, тобто забезпечується від'ємний зворотний зв'язок. Аналогічним чином відбувається корекція сигналу регулювання у випадку, коли вхідний код функціонального перетворювача код-код 5 більший Nвx +0, при цьому вихідний код функціонального перетворювача код-код 5 є величиною від'ємною (доповнюваним). А у випадку, коли вхідний код Nвx 0 знаходиться посередині інтервалу від Nвx -0 до Nвx +0, на ви ході функціонального перетворювача код-код 5 формується нульове значення поправки, яка коректує, що призводить до незмінності сигналу регулювання. Таким чином, у запропонованому пристрої адаптивного управління порогом вимірювання амплітуди вхідного потоку сигналів формування цифрового коду з ви хідного сигналу пристрою відбувається простими стандартними методами (сучасні АЦП виконані у вигляді одного корпусу інтегральної мікросхеми), а необхідний критерій якості, наприклад, стабільна величина вихідного сигналу пристрою або задана вірогідность правильного виявлення, забезпечується за допомогою функціонального перетворювача код-код, який можливо виконати на одній інтегральній мікросхемі постійного запам'ятовуючого пристрою (ПЗП) з відповідним програмуванням. Відсутність нелінійної обробки цифрових сигналів дозволяє виконувати операції цифрових обчислень із сталою розрядною сіткою, необхідною для забезпечення необхідної точності визначення порогової величини чи забезпечення величини вихідного сигналу. Фіг. 1 3 38860 Фіг. 2 Фіг. 3 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 4
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for threshold adaptable control under measurement of input signal flow amplitude
Автори англійськоюMarchenko Vasyl Vasyliovych, Mokeiev Yurii Hennadiiovych, Nemchyn Oleksandr Fedorovych, Kopnov Mykhailo Oleksandrovych, Riabkin Yurii Viktorovych
Назва патенту російськоюУстройство адаптивного управления порогом измерения амплитуды входного потока сигналов
Автори російськоюМарченко Василий Васильевич, Мокеев Юрий Геннадьевич, Немчин Александр Федорович, Копнов Михаил Александрович, Рябкин Юрий Викторович
МПК / Мітки
МПК: H03G 3/20
Мітки: вхідного, сигналів, пристрій, порогом, адаптивного, амплітуди, управління, вимірювання, потоку
Код посилання
<a href="https://ua.patents.su/4-38860-pristrijj-adaptivnogo-upravlinnya-porogom-vimiryuvannya-amplitudi-vkhidnogo-potoku-signaliv.html" target="_blank" rel="follow" title="База патентів України">Пристрій адаптивного управління порогом вимірювання амплітуди вхідного потоку сигналів</a>
Пристрій для вимірювання швидкості та температури потоку
Номер патенту: 30477
Опубліковано: 15.11.2000
Автори: Шигера Ігор Юрійович, Івахів Орест Васильович
МПК: G01P 5/10
Мітки: температури, пристрій, вимірювання, швидкості, потоку
Формула / Реферат:
Пристрій для вимірювання швидкості та температури потоку, що містить високостабільний постійний резистор, з'єднаний нижнім виводом через перетворювач швидкості-температури з землею та виходом ключа, вхід керування якого з'єднано з виходом генератора опорної частоти, перший і другий підсилювачі змінного струму, відрізняється тим, що в нього додатково введено джерело змінного струму, джерело постійного струму, диференційний підсилювач,...
Спосіб обробки цифрових сигналів по типу переважно адаптивного трансверсального фільтра і пристрій для його впровадження
Номер патенту: 6011
Опубліковано: 29.12.1994
Автор: Хайнріх Шенк
МПК: H03H 21/00
Мітки: фільтра, переважно, обробки, типу, трансверсального, адаптивного, сигналів, цифрових, пристрій, впровадження, спосіб
Формула / Реферат:
1. Способ обработки цифровых сигналов по типу предпочтительного адаптивного трансверсального фильтра, заключающийся в пошаговой задержке времени прохождения элементов сигнала на (N-1) шагов времени задержки, накоплении сигналов, которые соответствуют группе задержанных элементов сигналов, оцениваемых с учетом массовых коэффициентов, причем во время шагов времени прохождения элементов сигналов с учетом действительных комбинаций задержанных...
Пристрій для передачі і приймання сигналів дистанційного управління
Номер патенту: 7623
Опубліковано: 26.12.1995
Автори: Кононов Валерій Олександрович, Альохін Володимир Семенович
МПК: G08C 19/36
Мітки: управління, сигналів, приймання, передачі, дистанційного, пристрій
Формула / Реферат:
Устройство для передачи и приема сигналов дистанционного управленияпо авт. св. №1218810, отличающееся тем, что, с целью повышения функциональной надежности, в него введены инверторы, элемент И и элемент ИЛИ-НЕ, между выходом приемника команд управления и информационным входом регистра подключен своими первым входом и выходом соответственно элемент И, второй вход которого соединен через первый инвертор с выходом счетчика импульсов, между...
Пристрій для повірки приладів для вимірювання амплітуди коливань
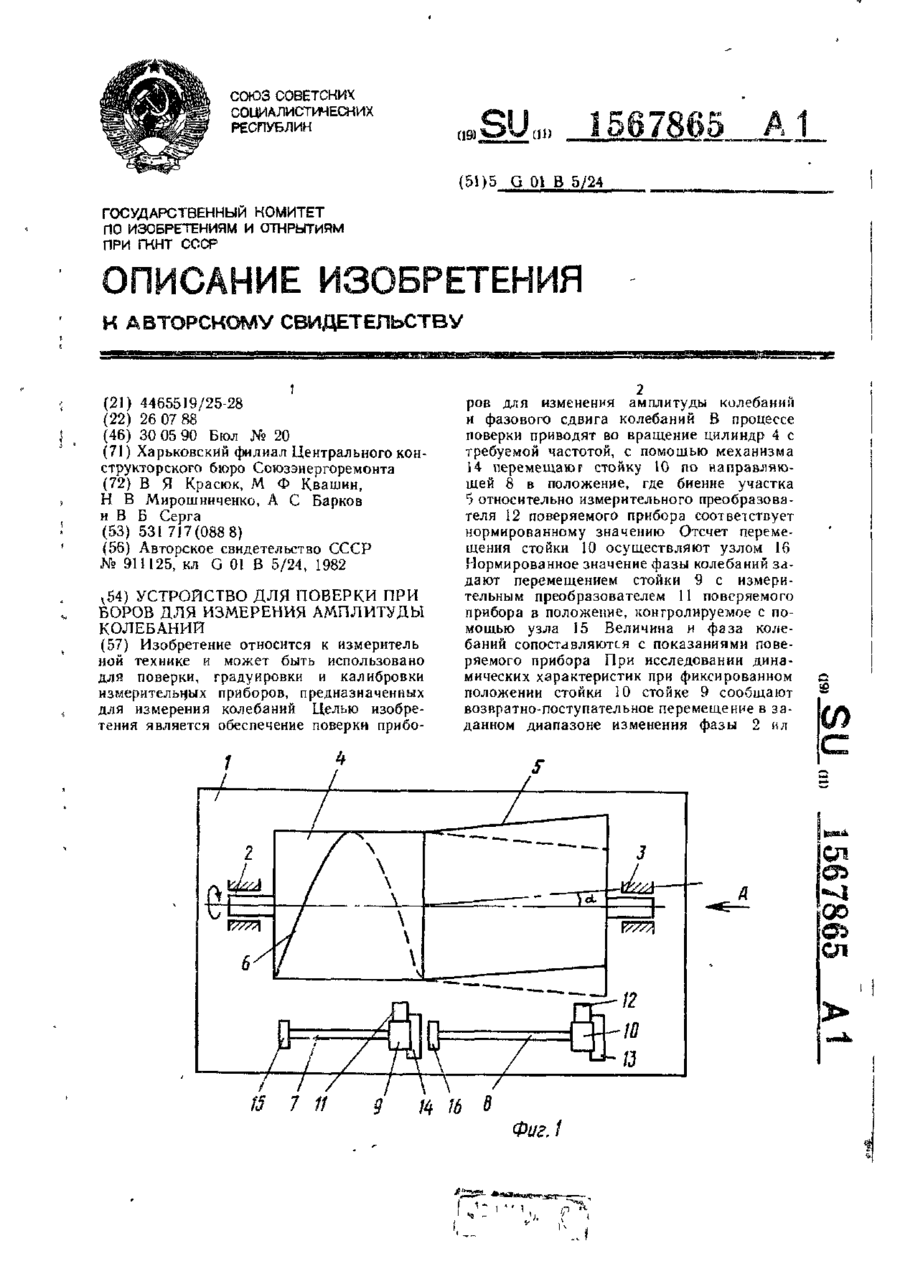
Номер патенту: 363
Опубліковано: 30.04.1993
Автори: Барков Олександр Степанович, Серга Валерій Борисович, Мирошниченко Микола Васильович, Красюк Володимир Якович, Квашин Михайло Федорович
МПК: G01B 5/24
Мітки: повірки, приладів, пристрій, коливань, амплітуди, вимірювання
Формула / Реферат:
Устройство для поверки приборов для измерения амплитуды колебаний, содержащее основание с подшипниковыми опорами, установленный в опорах цилиндр, ось наружной поверхности которого направлена под углом к оси опор, направляющую, закрепленную на основании параллельно оси опор, установленную на направляющей с возможностью перемещения вдоль нее стойку, предназначенную для крепления измерительного преобразователя поверяемого прибора, механизм...
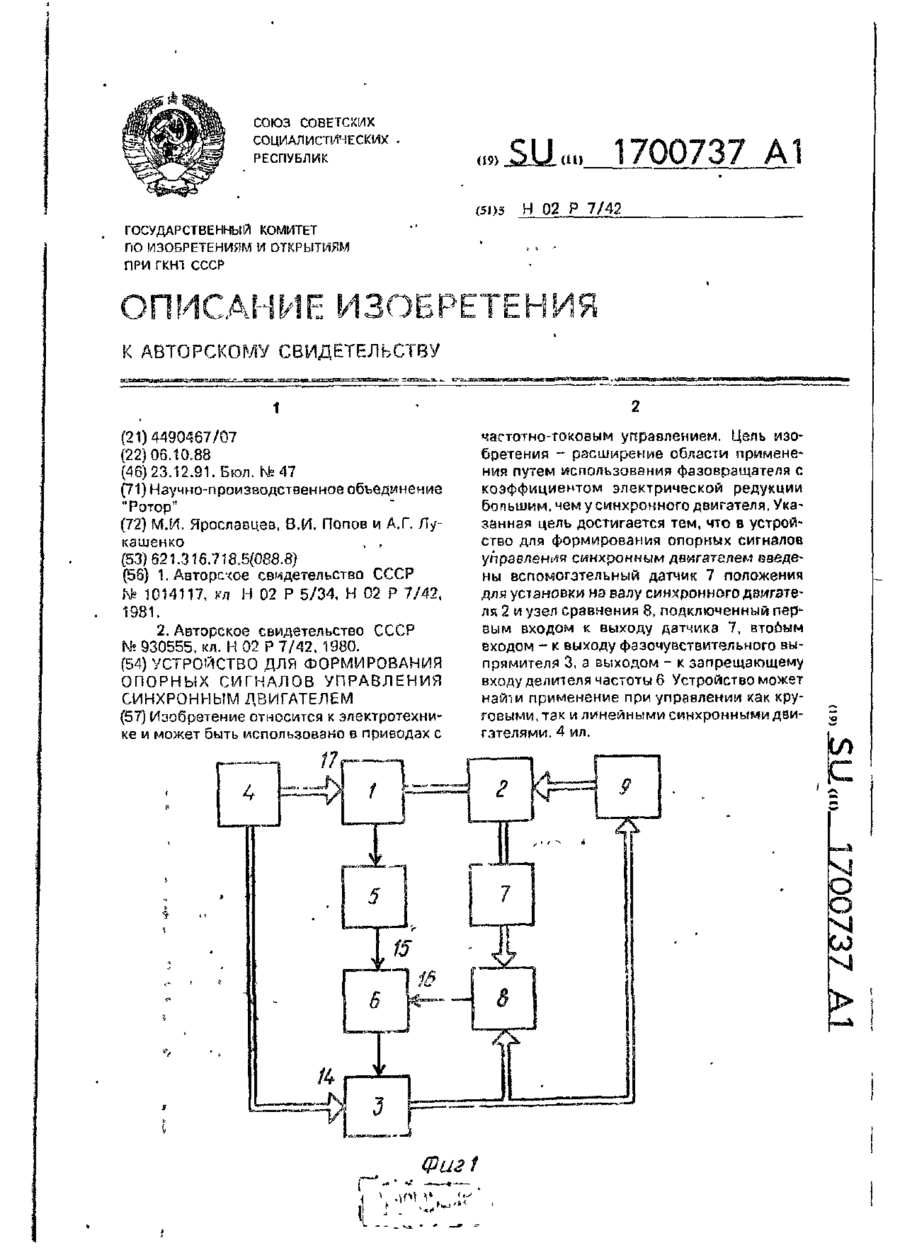
Пристрій для формування опорних сигналів управління сінхронним двигуном
Номер патенту: 4491
Опубліковано: 27.12.1994
Автори: Ярославцев Михайло Іванович, Лукашенко Андрій Германович, Попов Віктор Іванович
МПК: H02P 27/04
Мітки: управління, пристрій, опорних, сигналів, формування, двигуном, сінхронним
Формула / Реферат:
Устройство для формирования опорных сигналов управления синхронным двигателем, содержащее фазовращатель, ротор которого предназначен для механического соединения с ротором синхронного двигателя, фазочувствительный выпрямитель, выход которого образует выход названного устройства, задающий генератор, первый выход которого подключен к входу фазовращателя, а второй - к первому входу фазочувствительного выпрямителя, формирователь коротких...
Попередній патент: Лінійний блок системи телемеханіки
Наступний патент: Двопотічний відцентровий насос
Випадковий патент: Комплексний реагент для очищення цукровмісних продуктів