Пристрій для керування рухом космічного апарату навколо центру мас
Формула / Реферат
1. Устройство для управления движением космического аппарата вокруг центра масс, содержащее релейный гироскопический датчик угловой скорости, блок управления исполнительным органом и исполнительный орган, отличающееся тем, что в него введены генератор колебаний и устройство сравнения длительности или частоты сигналов релейного гироскопического датчика угловой скорости с длительностью полупериода или частотой генератора колебаний, релейный гироскопический датчик угловой скорости снабжен датчиком момента, установленным на оси рамки релейного датчика угловой скорости, причем выход генератора колебаний соединен с датчиком момента, первый и второй входы устройства сравнения соединены с датчиком угла релейного гироскопического датчика угловой скорости и генератором колебаний соответственно, а выход устройства сравнения соединен с блоком управления исполнительным органом.
2. Устройство для управления движением космического аппарата вокруг центра масс по п. 1, отличающееся тем, что в него введен блок формирования сигнала смещения, своим выходом соединенный со входом, датчика момента с возможностью суммирования выходного сигнала блока формирования с выходным сигналом генератора колебаний.
3. Устройство для управления движением космического аппарата вокруг центра масс по п.п. 1, 2, отличающееся тем, что в него введен датчик ориентации на опорный ориентир, выход которого подключен к датчику момента с возможностью суммирования выходного сигнала датчика ориентации с выходными сигналами генератора колебаний (и блока формирования сигнала смещения).
4. Устройство управления движением космического аппарата вокруг центра масс по п.п. 1, 2, 3, отличaющееся тем, что в него введен ключ, через который устройство сравнения длительности или частоты сигналов релейного гироскопического датчика угловой скорости с длительностью полупериода или частотой генератора колебаний подключено,к блоку управления исполнительным органом, второй вход ключа связан с релейным гироскопическим датчиком угловой скорости.
Текст
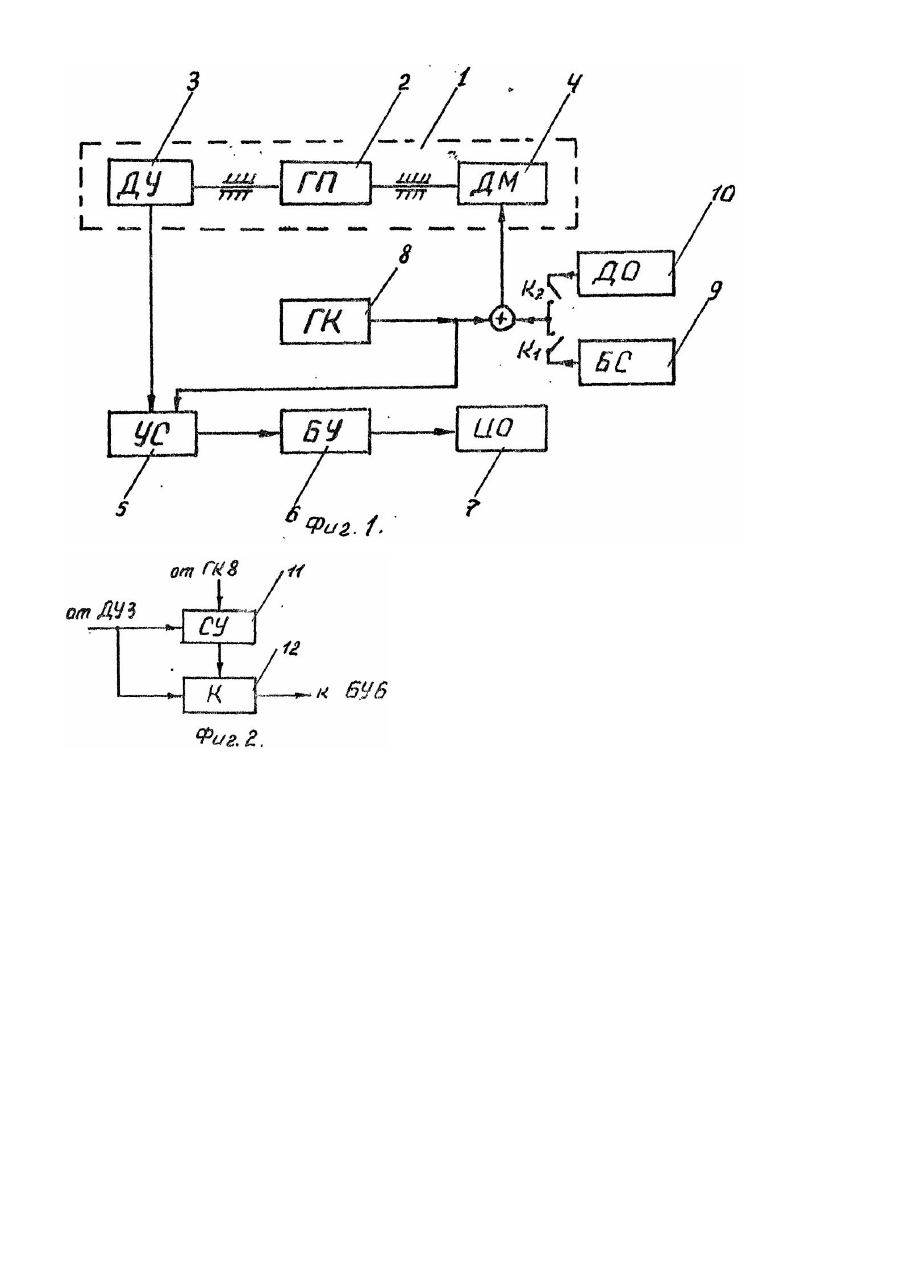
Изобретение относится к устройствам управления движением космического аппарата (КА) вокруг центра масс и может быть использовано для выполнения режимов успокоения, поиска опорных ориентиров и ориентации. Известны устройства управления движением КА вокруг центра масс [1], обеспечивающие режим успокоения (стабилизации) и содержащие последовательно включенные датчики, например, угловой скорости, логическипреобразующие блоки и исполнительные органы. Датчик угловой скорости в общем самом распространенном случае содержит гироскоп, установленный на подвижной раме, ось вращения которой перпендикулярна оси вращения ротора гироскопа, датчик угла, измеряющий угол поворота относительно корпуса прибора, датчик момента, с помощью которого можно создать вращающий момент по оси рамки и упругую связь, которая может представлять собой механическую или "электрическую" пружину, состоящую из последовательно включенных датчика угла, усилителя и датчика момента. Известно устройство управления движением КА вокруг центра масс (прототип) в режиме успокоения [2]. Для успокоения используются только сигналы датчиков угловы х скоростей, включаемые по простейшей логике, момент, создаваемый исполнительным органом, имеет знак, противоположный знаку угловой скорости, для чего можно использовать наиболее простой релейный датчик угловой скорости, Положительным свойством прототипа является то, что в этом случае устройство значительно упрощается, отпадает необходимость в использовании механической или "электрической" пружины, существенно упрощается датчик угла поворота рамки гироскопа, т.к. им может быть любой датчик релейного типа (например, контактный). Недостатком известного устройства управления является то, что после гашения угловой скорости начинаются двусторонние включения исполнительного органа, в результате чего имеет место увеличение энергопотребления или расход рабочего тела, а также увеличивается число срабатываний исполнительного органа. В основу изобретения поставлена задача усовершенствования устройства для управления движением космического аппарата вокруг центра масс, в котором обеспечивается уменьшение энергопотребления в установившемся режиме после гашения скорости и уменьшение числа включений исполнительного органа за счет дополнительного введения генератора колебаний (ГК), датчика момента и анализатора колебаний при этом увеличивается ресурс работы системы управления. Поставленная задача решается тем, что в устройство для управления движением космического апарата вокруг центра мас, содержащеерелейный гироскопический датчик угловой скорости, блок управления исполнительным органом и исполнительный орган, согласно изобретению, введены генератор колебаний и устройство сравнения длительности или частоты сигналов релейного гироскопического датчика угловой скорости с длительностью полупериода или частотой генератора колебаний, релейный гироскопический датчик угловой скорости снабжен датчиком момента, установленным на оси рамки релейного датчика угловой скорости, причем выход генератора колебаний соединен сдатчиком момента, первый и второй входы устройства сравнения соединены с датчиком угла релейного гироскопического датчика угловой скорости и генератором колебаний соответственно, а вы ход устройства сравнения соединен с блоком управления исполнительным органом. Кроме того, дополнительно для обеспечения режима поиска опорного ориентира с заданной скоростью введен блок формирования сигнала смещения, своим выходом соединенный со входом датчика момента с возможностью суммирования выходного сигнала блока формирования и выходным сигналом генератора колебаний. Кроме того, дополнительно, для обеспечения режима ориентации по сумме сигналов углового отклонения и угловой скорости введен датчик ориентации на опорный ориентир, выход которого подключен к датчику момента с возможностью суммирования выходного сигнала датчика ориентации с выходными сигналами генератора колебаний, а также при необходимости с выходными сигналами блока формирования сигнала смещения. Кроме того, как частный случай, устройство сравнения длительности или частоты сигналов релейного гироскопического датчика угловой скорости с длительностью полупериода или частотой генератора колебаний выполнено в виде ключа, через который сравнивающее устройство длительности импульса сигналов релейного гироскопического датчика угловой скорости с длительностью полупериода генератора колебаний подключено к блоку управления исполнительным органом, второй вход ключа связан с релейным гироскопическим датчиком угловой скорости. Сущность предложения поясняется чертежом, где на фиг. 1 изображена блок-схема предлагаемого устройства, а на фиг. 2 -блок схема устройства сравнения длительности импульса релейного датчика угловой скорости с длительностью полупериода генератора колебаний и ключ. Устройство согласно фиг. 1 содержит релейный гироскопический датчик угловой скорости (РДУС) 1, состоящий из гироскопа (ГП) 2, датчика угла (ДУ) 3 и датчика момента (ДМ) 4; РДУС 1 подключен последовательно через устройство сравнения длительности или частоты сигналов релейного гироскопического датчика угловой скорости с длительностью полупериода или частотой генератора колебаний (УС) 5 и блок управления (БУ) 6 к исполнительному органу (ИО) 7. К ДМ 4 через сумматор подключен генератор колебаний (ГК) 8 и через переключатели Κ1 или К2 соответственно блок формирования сигнала смещения (БС) 9 или датчик ориентации (ДО) 10 на опорный ориентир, Блок-схема устройства сравнения 5 (фиг. 2) содержит сравнивающее устройство (СУ) 11 и ключ (К) 12. На первый и второй входы СУ 11 подаются сигналы соответственно с выходов РДУ 3 и ГК 8. Работа устройства заключается в следующем: при разомкнутых переключателях Κ1 и К 2 отключены блоки БС 9 и ДО 10. Для данного случая уравнение движения подвижной рамки ГП 2 имеет вид: где I - момент инерции подвижной рамки вместе с установленными на ней элементами конструкции; h - коэффициент вязкого трения; mт - модуль величины момента сухого трения; a - угол поворота подвижной рамки вокруг выходной оси; w х - проекция абсолютной угловой скорости на ось чувстви тельности; Η - модуль кинетического момента гироскопа; m(a ) - возмущающие моменты, зависящие от угла поворота а; С - крутизна ДМ 4; Ur - выходной сигнал ГК 8, например, синусоидальный или периодический с прямоугольными импульсами отрицательной и положительной полярности и др. Из уравнения (1) следует, что при выполнении условия подвижная рамка ГП 2 будет прижата к упору гироскопическим моментом m 2 = Hw x cos a и ДУ 3 будет выдавать постоянный сигнал, полярность которого равна signw х , УС 5 будет в свою очередь выдавать релейный сигнал, по которому включится ИО 7 и начнется торможение (гашение скорости w х ) ΚΑ. Наступит момент времени когда будут выполняться следующие условия: при этом, если наступит в связи с уменьшением w х условие; то подвижная рамка начнет отрываться от упора под действием сигналов ГК8, а сигнал ДУ 3 станет переменным. Изменение выходного сигнала ДУ 3 в течение одного периода выходного сигнала ГК 8 означает, CUr CUr что w x Т2 или нет, где Т р - длительность сигнала РДУЗ, Т2 - длительность полупериода ГК 8. Если Тр>Т2, то на выходе СУ 11 появляется сигнал, поступающий на первый вход К 12, а на второй вход К 12 подается сигнал с ДУЗ (т.е. с релейного гироскопического датчика угловой скорости). При наличии сигнала на первом входе К 12 последний открыт и пропускает сигнал ДУЗ в БУ 6 с соответствующей полярностью, по которому включается ИО 7. СУ 11 измеряет или в него закладывают информацию о длительности Т2 полупериода сигнала ГК 8. При появлении импульса на выходе ДУЗ СУ 11 начинает сравнивать его длительность Тр с полупериодом Т2 ГК 8. Если длительность импульса ДУЗ начинает превышать значение Т2, то на выходе СУ 11 появляется сигнал, открывающий ключ 12, через который сигнал с выхода ДУ 3 поступает с соотве тствующей полярностью на выход УС 5, а от него на вход БУ 6. Если сигнал ДУЗ изменяет полярность, т.е. уменьшается до нуля, то СУ 11 устанавливается в исходное положение: ключ 12 запирается, При появлении сигнала на выходе ДУЗ вновь повторяются вышеописанные операции. Когда длительность сигнала ДУ 3 превысит T2 , вновь открывается ключ 12 и сигнал с ДУЗ поступает в БУ 6 до тех пор, пока сигнал ДУЗ не уменьшится до нуля и ключ 12 закроется. Если сигналы ДУЗ по длительности Тр будут меньше или равны Т2, то ключ 12 будет заперт, сигнал в БУ 6 не будет поступать и ИО 7 будет выключен. Из вышеописанного следует, что предлагаемое устройство для управления движением космического аппарата вокруг центра масс обеспечивает все известные режимы работы ориентации при использовании не линейного, а релейного датчика угловой скорости гироскопического типа.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice of control of motion of automatic spacecraft around center of masses
Автори англійськоюAnuprienko Hennadii Yefremovych
Назва патенту російськоюУстройствам для управления движением космического аппарата вокруг центра масс
Автори російськоюАнуприенко Геннадий Ефремович
МПК / Мітки
МПК: B64G 1/24
Мітки: космічного, апарату, пристрій, центру, керування, мас, рухом
Код посилання
<a href="https://ua.patents.su/4-3991-pristrijj-dlya-keruvannya-rukhom-kosmichnogo-aparatu-navkolo-centru-mas.html" target="_blank" rel="follow" title="База патентів України">Пристрій для керування рухом космічного апарату навколо центру мас</a>
Спосіб керування орієнтацією космічного апарату
Номер патенту: 3754
Опубліковано: 27.12.1994
Автор: Анупрієнко Генадій Єфремович
Мітки: космічного, орієнтацією, апарату, керування, спосіб
Формула / Реферат:
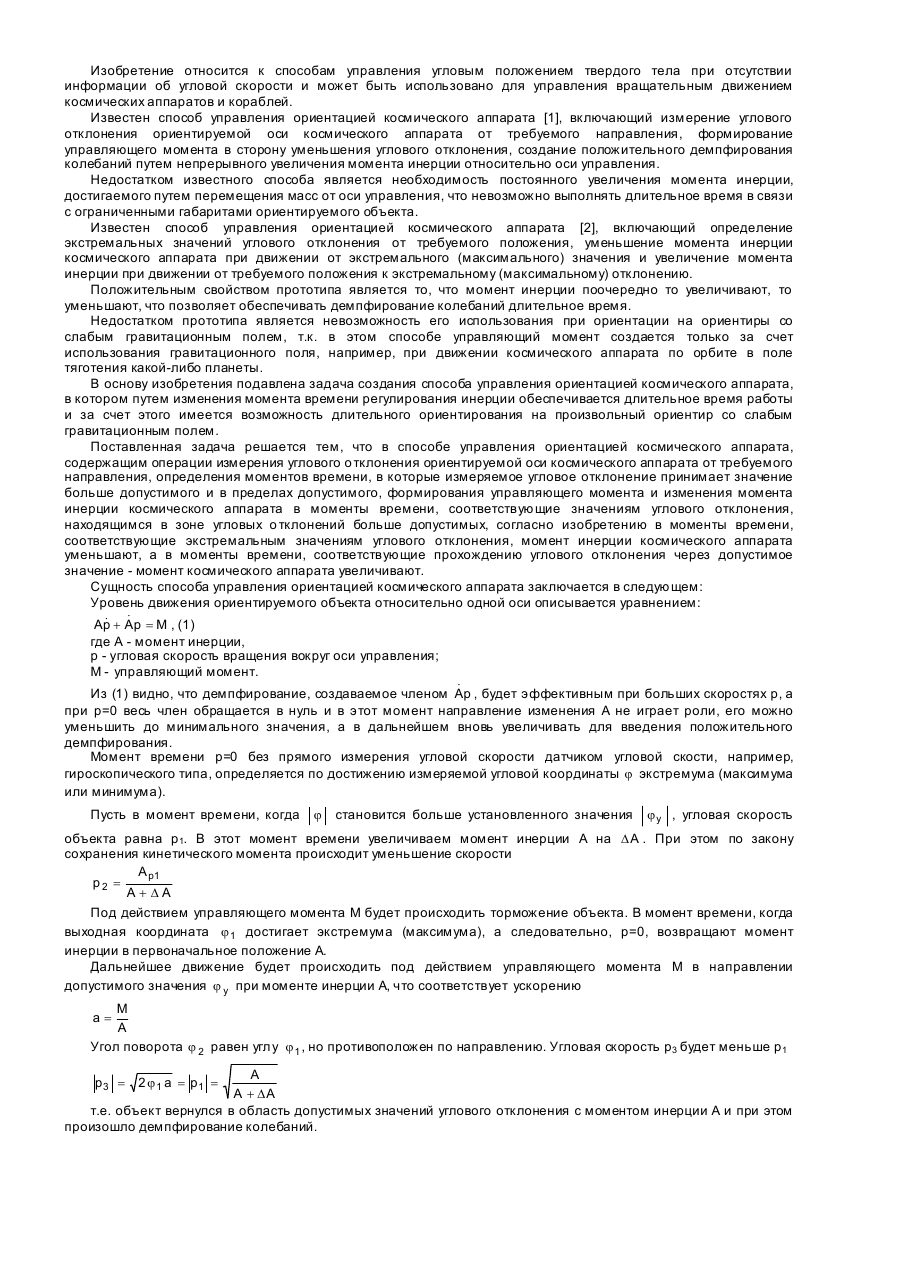
Способ управления ориентацией космического аппарата, включающий измерение углового отклонения ориентируемой оси космического аппарата от требуемого направления, определение моментов времени, в которые измеряемое угловое отклонение принимает экстремальные значения, изменение момента инерции космического аппарата в моменты времени, соответствующие экстремальным значениям углового отклонения и значениям углового отклонения, находящимся в зоне...
Спосіб визначення відносної кутової швидкості під час коливального процесу керування орієнтаціею об’єкту на рухомий орієнтир
Номер патенту: 3990
Опубліковано: 27.12.1994
Автор: Анупрієнко Генадій Єфремович
МПК: B64G 1/24
Мітки: відносної, орієнтир, орієнтаціею, рухомий, швидкості, об'єкту, коливального, визначення, спосіб, керування, кутової, процесу
Формула / Реферат:
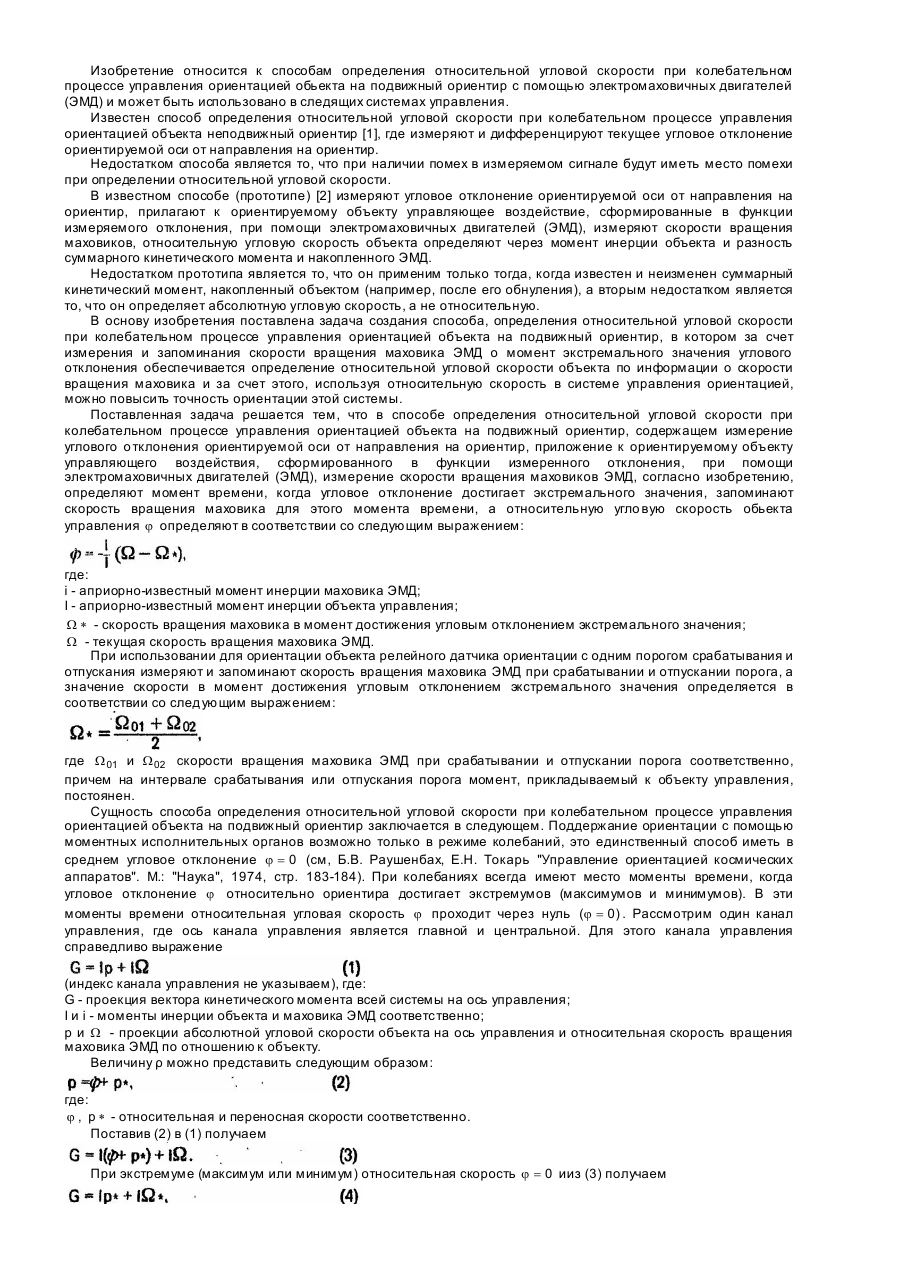
1. Способ определения относительной угловой скорости при колебательном процессе управления ориентацией объекта на подвижным ориентир, включающий измерение углового отклонения ориентируемой оси от направления на ориентир, приложение к ориентируемому объекту управляющего воздействия, сформированного в функции измеренного отклонения, при помощи электромаховичных двигателей (ЭМД), измерение скорости вращения маховиков ЭМД, отличающийся тем, что...
Пристрій для керування електричним режимом дугової сталеплавильної печі постійного струму
Номер патенту: 3022
Опубліковано: 26.12.1994
Автори: Маш'янов Володимир Гаврилович, Саньков Сергій Анатолійович, Магда Володимир Васильович, Малиновський Володимир Сергійович, Філіпов Олексій Костянтинович
МПК: H05B 7/148
Мітки: режимом, керування, електричним, печі, дугової, струму, сталеплавильної, постійного, пристрій
Формула / Реферат:
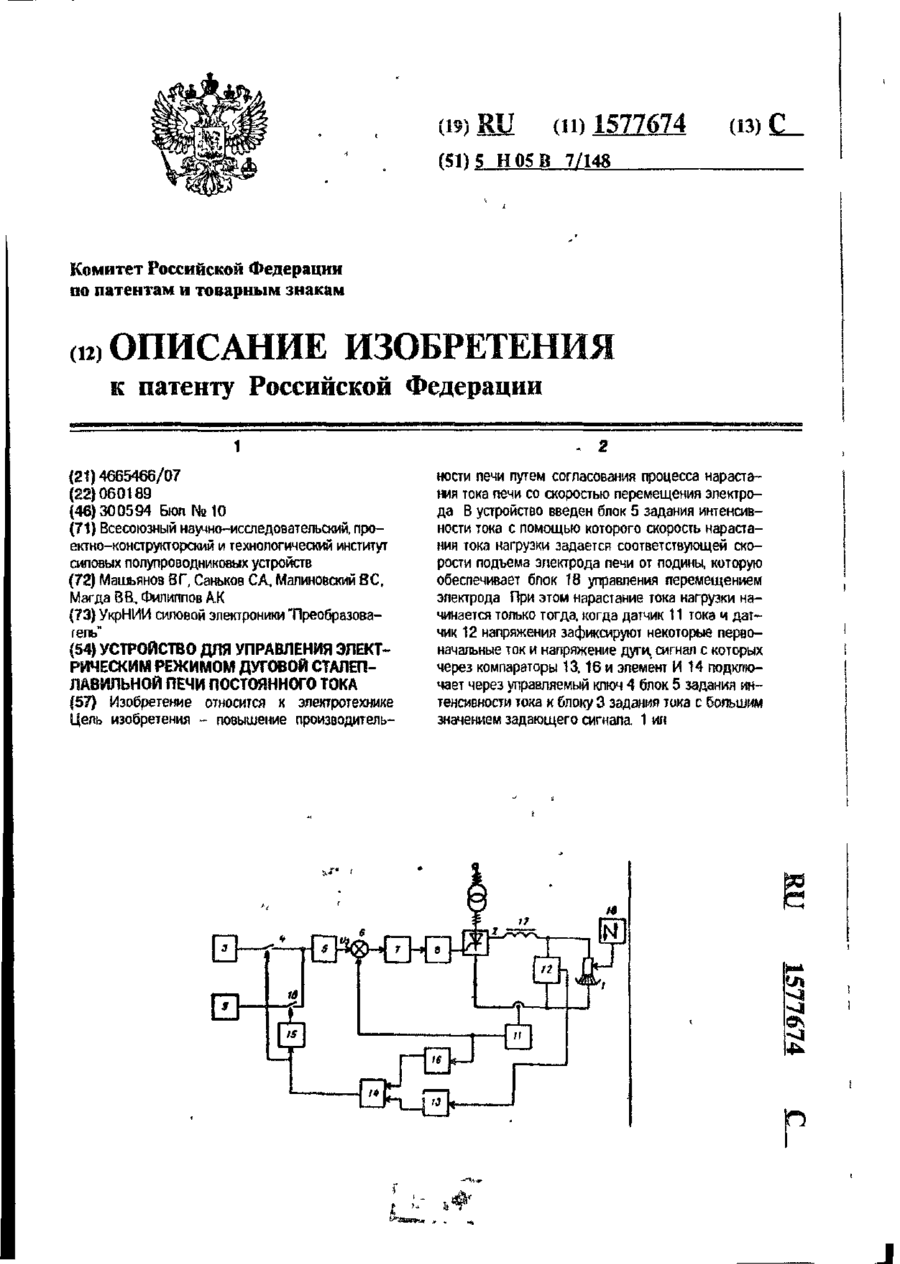
Устройство для управления электрическим режимом дуговой сталеплавильной печи постоянного тока, содержащее блок управления перемещением электрода, датчик тока электрода, выход которого соединен с первым входом блока сравнения, соединенного выходом с входом регулятора тока, выход которого соединен с входом системы импульсно-фазового управления источника питания, первый и второй блоки задания тока, первый и второй управляемые ключи и датчик...
Пристрій для керування двохдвигуновим тяговим електроприводом
Номер патенту: 2534
Опубліковано: 26.12.1994
Автор: Колесник Анатолій Петрович
МПК: B60L 15/20, B60L 3/10
Мітки: керування, двохдвигуновим, тяговим, пристрій, електроприводом
Формула / Реферат:
Устройство для управления двухдвигательным тяговым электроприводом, содержащее включенные в цепи питания электродвигателей преобразователи электрической энергии, выполненные в виде групп управляемых стабилизаторов тока, поворотный орган управления, на выходе которого установлен датчик угла поворота, преобразователь аналог-код, выходы которого соединены с управляющими входами стабилизаторов тока одного из преобразователей электрической...
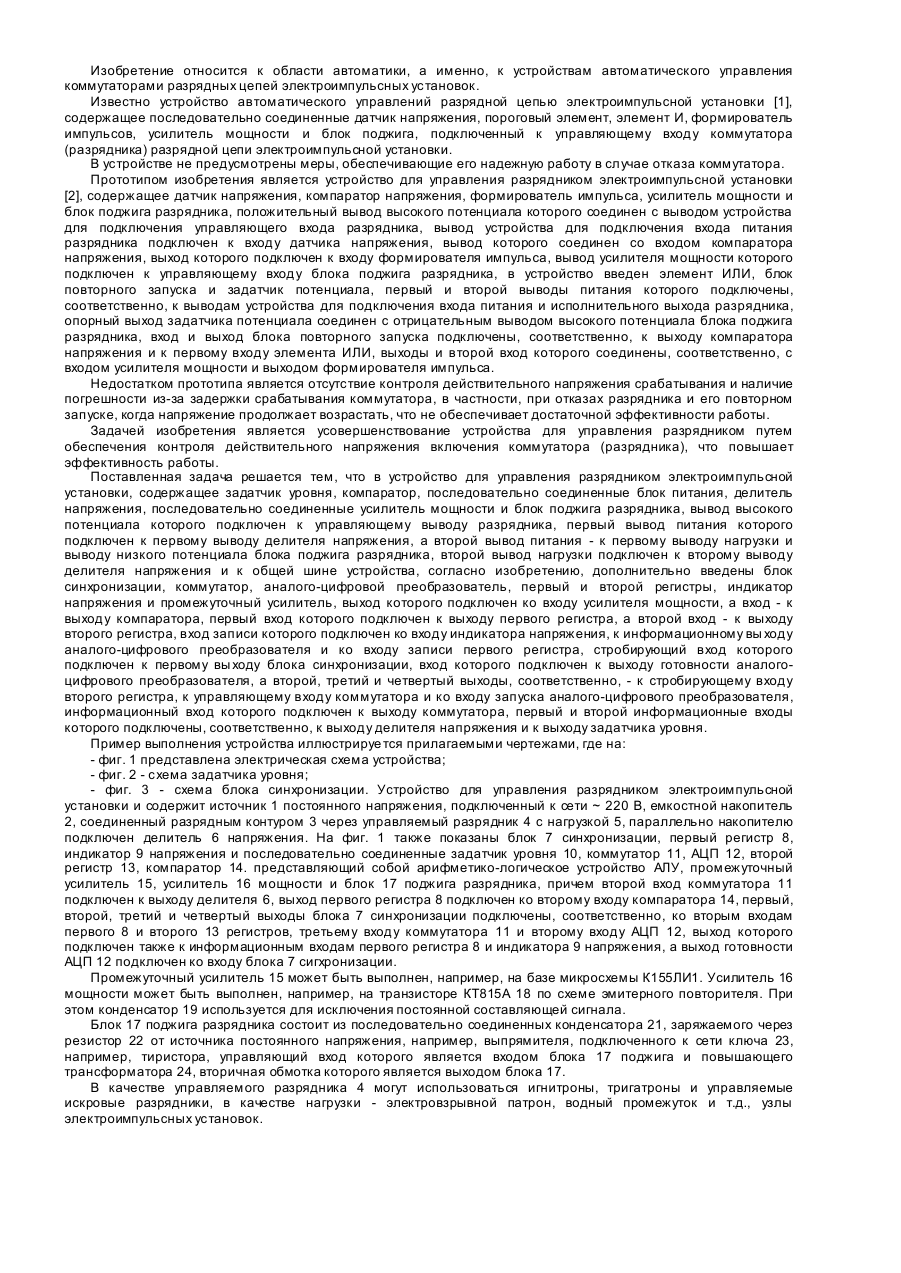
Пристрій для керування розрядником електроімпульсної установки
Номер патенту: 3323
Опубліковано: 27.12.1994
Автори: Байдиченко Микола Павлович, Вовк Іван Трохимович, Соболева Майя Борисівна
МПК: G05B 19/00
Мітки: установки, керування, електроімпульсної, розрядником, пристрій
Формула / Реферат:
Устройство для управления разрядником электроимпульсной установки, содержащее задатчик уровня, компаратор, последовательно соединенные блок питания, делитель напряжения, последовательно соединенные усилитель мощности и блок поджига разрядника, вывод высокого потенциала которого подключен к управляющему выводу разрядника, первый вывод питания которого подключен к первому выводу делителя напряжения, а второй вывод питания - к первому выводу...