Спосіб керування орієнтацією космічного апарату

Формула / Реферат
Способ управления ориентацией космического аппарата, включающий измерение углового отклонения ориентируемой оси космического аппарата от требуемого направления, определение моментов времени, в которые измеряемое угловое отклонение принимает экстремальные значения, изменение момента инерции космического аппарата в моменты времени, соответствующие экстремальным значениям углового отклонения и значениям углового отклонения, находящимся в зоне допустимых значений отклонения от требуемого направления, отличающийся тем, что в моменты времени, соответствующие экстремальным значениями углового отклонения, момент инерции космического аппарата уменьшают, а в моменты времени, соответствующие нахождению углового отклонения в зоне допустимых значений, момент инерции космического аппарата увеличивают.
Текст
Изобретение относится к способам управления угловым положением твердого тела при отсутствии информации об угловой скорости и может быть использовано для управления вращательным движением космических аппаратов и кораблей. Известен способ управления ориентацией космического аппарата [1], включающий измерение углового отклонения ориентируемой оси космического аппарата от требуемого направления, формирование управляющего момента в сторону уменьшения углового отклонения, создание положительного демпфирования колебаний путем непрерывного увеличения момента инерции относительно оси управления. Недостатком известного способа является необходимость постоянного увеличения момента инерции, достигаемого путем перемещения масс от оси управления, что невозможно выполнять длительное время в связи с ограниченными габаритами ориентируемого объекта. Известен способ управления ориентацией космического аппарата [2], включающий определение экстремальных значений углового отклонения от требуемого положения, уменьшение момента инерции космического аппарата при движении от экстремального (максимального) значения и увеличение момента инерции при движении от требуемого положения к экстремальному (максимальному) отклонению. Положительным свойством прототипа является то, что момент инерции поочередно то увеличивают, то уменьшают, что позволяет обеспечивать демпфирование колебаний длительное время. Недостатком прототипа является невозможность его использования при ориентации на ориентиры со слабым гравитационным полем, т.к. в этом способе управляющий момент создается только за счет использования гравитационного поля, например, при движении космического аппарата по орбите в поле тяготения какой-либо планеты. В основу изобретения подавлена задача создания способа управления ориентацией космического аппарата, в котором путем изменения момента времени регулирования инерции обеспечивается длительное время работы и за счет этого имеется возможность длительного ориентирования на произвольный ориентир со слабым гравитационным полем. Поставленная задача решается тем, что в способе управления ориентацией космического аппарата, содержащим операции измерения углового о тклонения ориентируемой оси космического аппарата от требуемого направления, определения моментов времени, в которые измеряемое угловое отклонение принимает значение больше допустимого и в пределах допустимого, формирования управляющего момента и изменения момента инерции космического аппарата в моменты времени, соответствующие значениям углового отклонения, находящимся в зоне угловых о тклонений больше допустимых, согласно изобретению в моменты времени, соответствующие экстремальным значениям углового отклонения, момент инерции космического аппарата уменьшают, а в моменты времени, соответствующие прохождению углового отклонения через допустимое значение - момент космического аппарата увеличивают. Сущность способа управления ориентацией космического аппарата заключается в следующем: Уровень движения ориентируемого объекта относительно одной оси описывается уравнением: & & Ap + Ap = M , (1) где А - момент инерции, р - угловая скорость вращения вокруг оси управления; М - управляющий момент. & Из (1) видно, что демпфирование, создаваемое членом Ap , будет эффективным при больших скоростях р, а при р=0 весь член обращается в нуль и в этот момент направление изменения А не играет роли, его можно уменьшить до минимального значения, а в дальнейшем вновь увеличивать для введения положительного демпфирования. Момент времени р=0 без прямого измерения угловой скорости датчиком угловой скости, например, гироскопического типа, определяется по достижению измеряемой угловой координаты j экстремума (максимума или минимума). Пусть в момент времени, когда j становится больше установленного значения j у , угловая скорость объекта равна p1. В этот момент времени увеличиваем момент инерции А на D А . При этом по закону сохранения кинетического момента происходит уменьшение скорости А р1 р2 = А+DА Под действием управляющего момента М будет происходить торможение объекта. В момент времени, когда выходная координата j 1 достигает экстремума (максимума), а следовательно, р=0, возвращают момент инерции в первоначальное положение А. Дальнейшее движение будет происходить под действием управляющего момента М в направлении допустимого значения j у при моменте инерции А, что соответствует ускорению М А Угол поворота j 2 равен углу j 1 , но противоположен по направлению. Угловая скорость р3 будет меньше р 1 а= А А + DА т.е. объект вернулся в область допустимых значений углового отклонения с моментом инерции А и при этом произошло демпфирование колебаний. р3 = 2 j 1 а = р1 = При входе в зону нечувствительности (область допустимых значений j p j у ) вновь можно увеличить момент инерции на величину D А , а затем при достижении экстремума вновь вернуть его в первоначальное состояние А. Таким образом, способ обеспечивает наиболее оптимальное демпфирование колебаний, т.к. в процессе управления момент инерции поочередно то увеличивается, то уменьшается на одну и ту же величину, и поэтому может выполняться в течение длительного времени, кроме того, за счет формирования управляющего момента ориентиром может быть любой объект независимо от его гравитационного поля.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of control of spacecraft orientation
Автори англійськоюAnuprienko Hennadii Yefremovych
Назва патенту російськоюСпособ управления ориентацией космического аппарата
Автори російськоюАнуприенко Геннадий Ефремович
МПК / Мітки
Мітки: апарату, космічного, орієнтацією, керування, спосіб
Код посилання
<a href="https://ua.patents.su/2-3754-sposib-keruvannya-oriehntaciehyu-kosmichnogo-aparatu.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування орієнтацією космічного апарату</a>
Спосіб визначення інерційних характеристик об’єкта
Номер патенту: 3847
Опубліковано: 27.12.1994
Автор: Анупрієнко Генадій Єфремович
Мітки: спосіб, характеристик, визначення, об'єкта, інерційних
Формула / Реферат:
1. Способ определения инерционных характеристик объекта, включающий приложение к объекту вращающих моментов и измерение параметров его углового движения, отличающийся тем, что вращающие моменты прикладывают по меньшей мере дважды, в различные моменты времени и при ненулевых проекциях абсолютной угловой скорости на связанные координатные оси, фиксируя каждый раз проекции вращающих моментов на указанные оси, измеряя проекции на эти оси...
Спосіб керування мостовим інвертором
Номер патенту: 3181
Опубліковано: 26.12.1994
Автор: Лукашенко Андрій Германович
Мітки: інвертором, мостовим, спосіб, керування
Формула / Реферат:
Способ управления мостовым инвертором, заключающийся в том, что вырабатывают сигналы управления ключами моста в зависимости от фиксированных уровней тока нагрузки, причем ключи первой диагонали моста включают, когда мгновенное значение тока нагрузки находится в интервале между нулевым уровнем, соответствующим нулевому току нагрузки, и переменным верхним уровнем, фиксированным в положительную сторону относительно заданного значения тока...
Спосіб керування холодильною установкою
Номер патенту: 3770
Опубліковано: 27.12.1994
Автор: Альохін Микола Борисович
МПК: F25B 49/00
Мітки: установкою, холодильною, спосіб, керування
Формула / Реферат:
Способ управления холодильной установкой, работающей от дизель-генераторов, и охлаждающей несколько камер, одну из которых выбирают ведущей, причем каждая камера оснащена одним или несколькими компрессорами, путем пуска-останова последних по сигналам термодатчиков с заданным диапазоном температур в камерах, отличающийся тем, что до пуска резервного компрессора дополнительно измеряют периоды колебаний температуры в камерах и в качестве ведущей...
Спосіб керування холодильною установкою
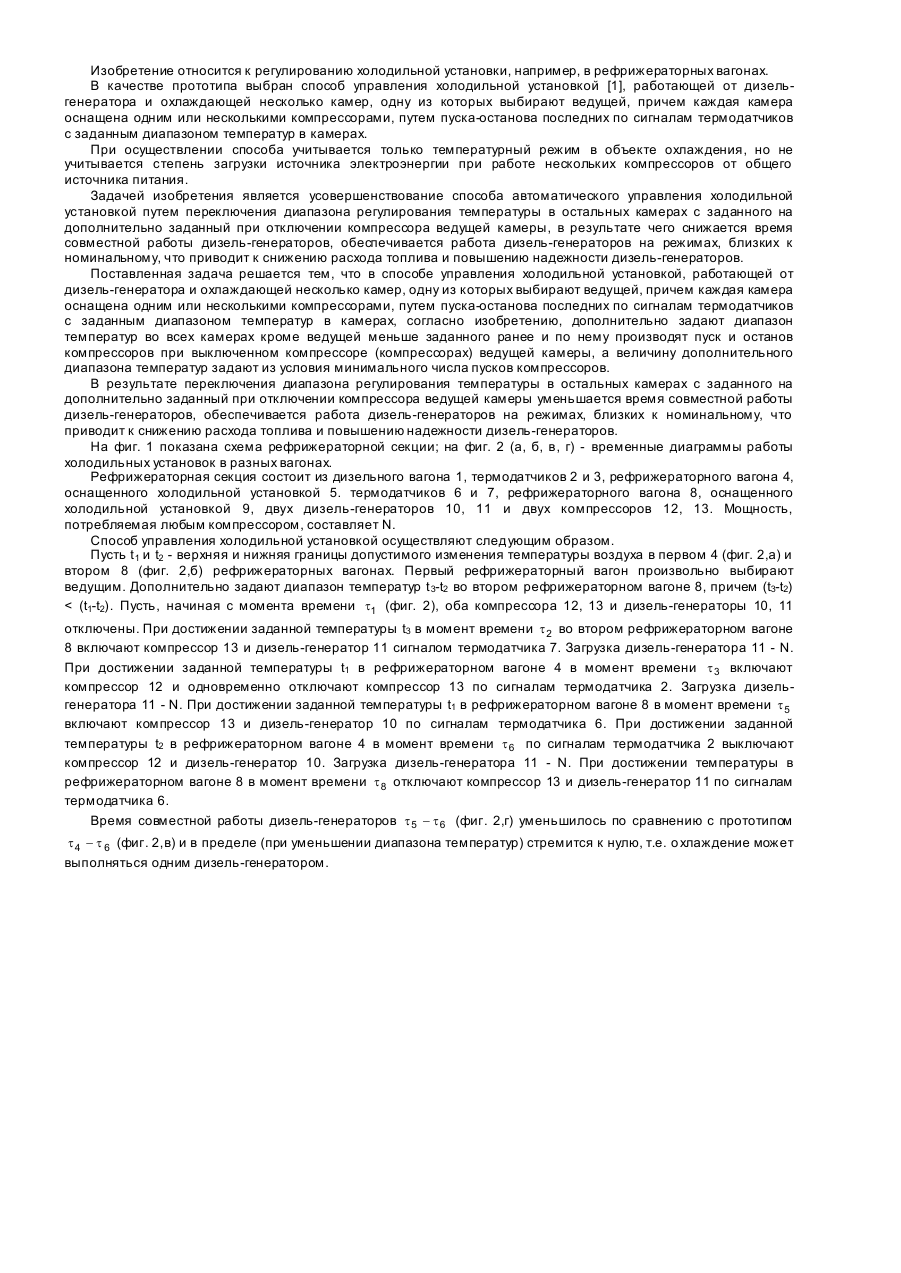
Номер патенту: 3769
Опубліковано: 27.12.1994
Автор: Альохін Микола Борисович
МПК: F25B 49/00
Мітки: керування, холодильною, спосіб, установкою
Формула / Реферат:
Способ управления холодильной установкой, работающей от дизель-генератора и охлаждающей несколько камер, одну из которых выбирают ведущей, причем каждая камера оснащена одним или несколькими компрессорами, путем пуска-останова последних по сигналам термодатчиков с заданным диапазоном температур в камерах, отличающийся тем, что дополнительно задают диапазон температур во всех камерах кроме ведущей меньше заданного ранее и по нему производят...
Спосіб керування тепловим станом доменної печі
Номер патенту: 4351
Опубліковано: 27.12.1994
Автори: Шумілов Кирило Андрійович, Мікрюков Борис Григорович, Первушин Сергій Іванович, Вишняк Євген Григорович, Секачов Віктор Гавриілович, Бошняков Аркадій Миколайович
МПК: C21B 7/24
Мітки: тепловим, доменної, спосіб, печі, станом, керування
Формула / Реферат:
Способ управления тепловым состоянием доменной печи, включающий прогнозирование на интервал времени t+ЗТ, где t-транспортное запаздывание; Т - постоянные времени канала "рудная нагрузка - кремний в чугуне", изменений содержания кремния в чугуне, вызванных контролируемыми изменениями состава и массы загружаемых шихтовых материалов, и коррекцию рудной нагрузки, пропорциональную прогнозируемым изменениям кремния от заданных...
Попередній патент: Склад для нанесення алюмоцинкового покриття на сталеві вироби
Наступний патент: Агрегат для підбирання плодів томатів
Випадковий патент: Спосіб контролю якості gaas сонячних елементів