Спосіб вимірювання швидкості рідини або газу в трубопроводі

Формула / Реферат
1. Спосіб вимірювання швидкості рідини або газу в трубопроводі за допомогою двох п'єзоелектричних датчиків, який полягає у вимірюванні часу проходження акустичних сигналів від одного п'єзоелектричного датчика до другого навпроти руху рідини або газу (Т1) і в напрямку цього руху (Т2), який відрізняється тим, що для підвищення точності вимірюють додатково також час повернення перших відбитих сигналів на перший (Т11) і другий (Т22) датчики, що їх випромінили, а швидкість V течії рідини або газу визначають за формулою:
![]() ,
,
де:
L - шлях акустичного сигналу в рідині або газі, що рухається,
α - кут між вектором швидкості V течії рідини або газу і напрямком проходження акустичного сигналу.
2. Спосіб вимірювання швидкості рідини або газу за п. 1, який відрізняється тим, що часові проміжки Т1, Т2, Т11 і Т22 вимірюють шляхом підрахунку кількості імпульсів високочастотного електричного сигналу стабільної частоти за інтервал часу між моментом випромінення і подією отримання відповідних прямих і відбитих акустичних сигналів.
3. Спосіб вимірювання швидкості рідини або газу за п. 2, який відрізняється тим, що часові проміжки Т1, Т2, Т11 і Т22 вимірюють шляхом підрахунку кількості імпульсів високочастотного електричного сигналу стабільної частоти за інтервал часу, що відповідає певній кількості циклів випромінювання.
4. Спосіб вимірювання швидкості рідини або газу за п. 1, який відрізняється тим, що часові проміжки Т1, Т2, Т11 і Т22 вимірюють шляхом пошуку максимуму кореляційної функції сигналів, що були випромінені, та відповідних прямих і відбитих акустичних сигналів, що були отримані
5. Спосіб вимірювання швидкості рідини або газу за п. 1, який відрізняється тим, що різницю часових проміжків Т1 і Т2 вимірюють шляхом пошуку максимуму кореляційної функції відповідних акустичних сигналів, що були отримані.
Текст
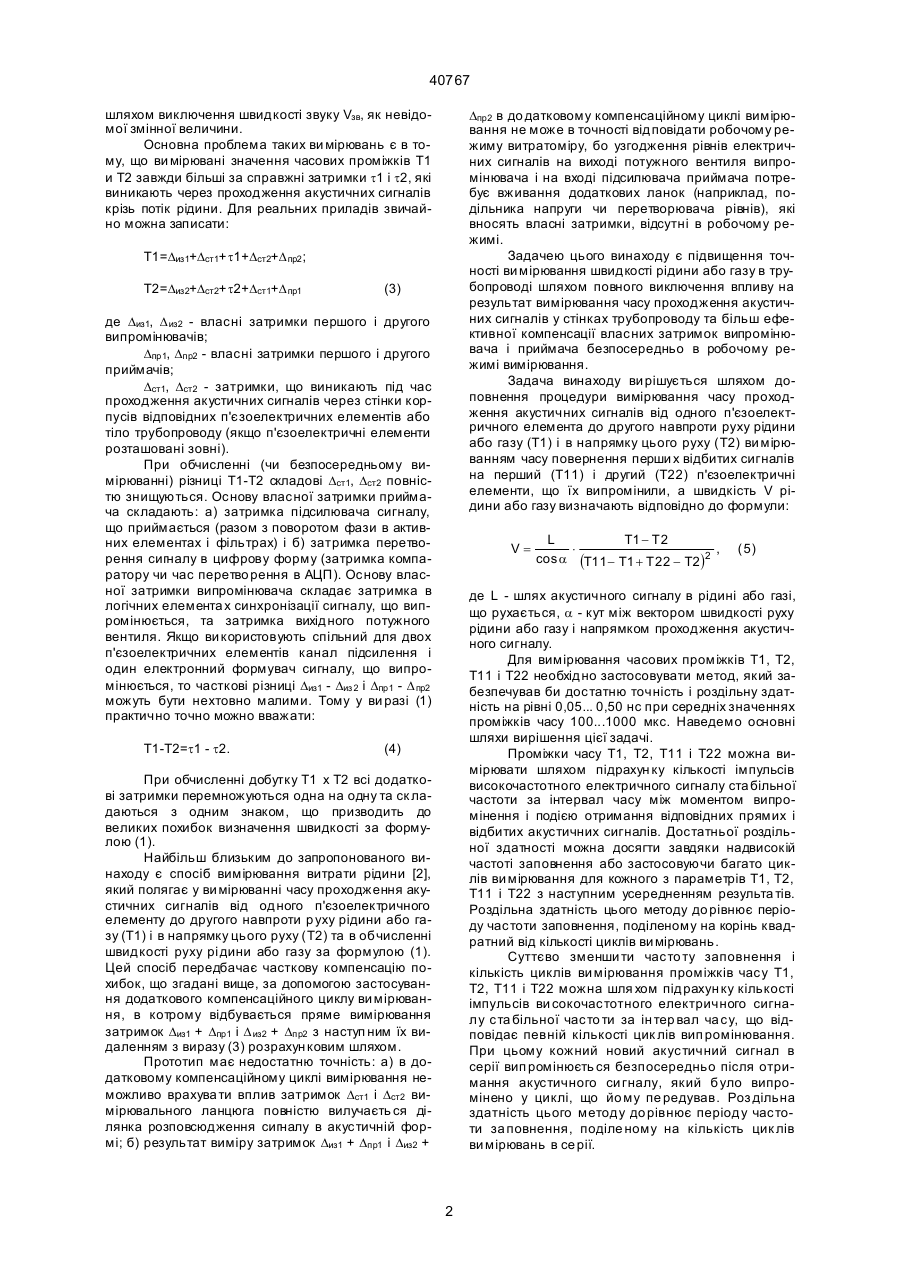
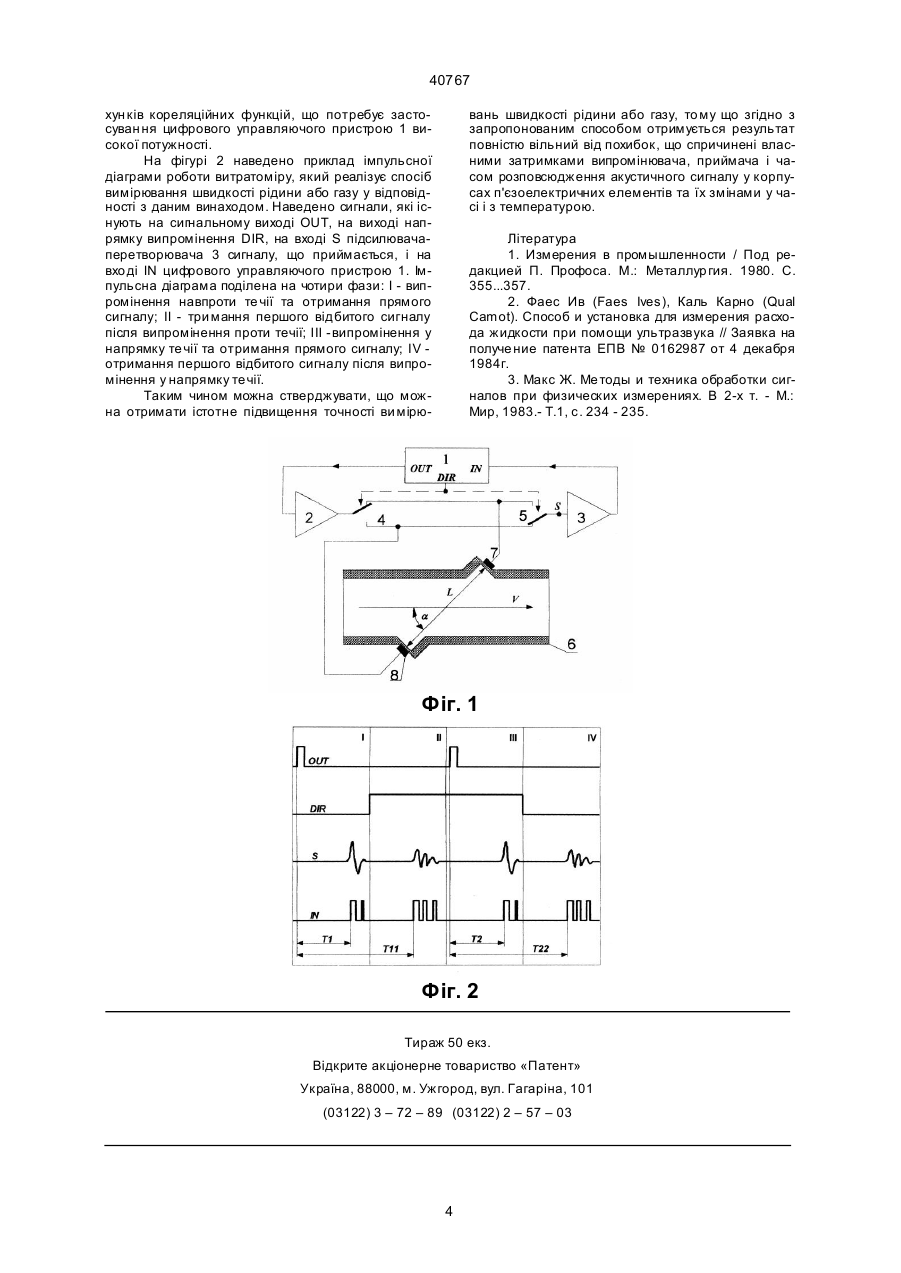
1. Спосіб вимірювання швидкості рідини або газу в трубопроводі за допомогою двох п'єзоелектричних датчиків, який полягає у вимірюванні часу проходження акустичних сигналів від одного п'єзоелектричного датчика до другого навпроти руху рідини або газу (Т1) і в напрямку цього руху (Т2), який відрізняється тим, що для підвищення точності вимірюють додатково також час повернення перших відбитих сигналів на перший (Т11) і другий (Т22) датчики, що їх випромінили, а швидкість V течії рідини або газу визначають за формулою: L T1 - T2 , V= × cos a (T11 - T1 + T22 - T 2 )2 А (54) СПОСІБ ВИМІРЮВАННЯ ШВИДКОСТІ РІДИНИ АБО ГАЗУ В ТРУБОПРОВОДІ 40767 Dпр2 в до датковому компенсаційному циклі вимірювання не може в точності відповідати робочому режиму витратоміру, бо узгодження рівнів електричних сигналів на виході потужного вентиля випромінювача і на вході підсилювача приймача потребує вживання додаткових ланок (наприклад, подільника напруги чи перетворювача рівнів), які вносять власні затримки, відсутні в робочому режимі. Задачею цього винаходу є підвищення точності ви мірювання швидкості рідини або газу в трубопроводі шляхом повного виключення впливу на результат вимірювання часу проходження акустичних сигналів у стінках трубопроводу та більш ефективної компенсації власних затримок випромінювача і приймача безпосередньо в робочому режимі вимірювання. Задача винаходу ви рішується шляхом доповнення процедури вимірювання часу проходження акустичних сигналів від одного п'єзоелектричного елемента до другого навпроти руху рідини або газу (Т1) і в напрямку цього руху (Т2) ви мірюванням часу повернення перши х відбитих сигналів на перший (Т11) і другий (Т22) п'єзоелектричні елементи, що їх випромінили, а швидкість V рідини або газу визначають відповідно до формули: шляхом виключення швидкості звуку Vзв, як невідомої змінної величини. Основна проблема таких ви мірювань є в тому, що ви мірювані значення часових проміжків Т1 и Т2 завжди більші за справжні затримки t1 і t2, які виникають через проходження акустичних сигналів крізь потік рідини. Для реальних приладів звичайно можна записати: Т1=Dиз1+Dст1+t1+Dст2+D пр2 ; Т2=Dиз2+Dст2+t2+Dст1+D пр1 (3) де Dиз1, D из2 - власні затримки першого і другого випромінювачів; Dпр1, Dпр2 - власні затримки першого і другого приймачів; Dст1, Dcт2 - затримки, що виникають під час проходження акустичних сигналів через стінки корпусів відповідних п'єзоелектричних елементів або тіло трубопроводу (якщо п'єзоелектричні елементи розташовані зовні). При обчисленні (чи безпосередньому вимірюванні) різниці Т1-Т2 складові Dст1, Dст2 повністю знищуються. Основу власної затримки приймача складають: а) затримка підсилювача сигналу, що приймається (разом з поворотом фази в активних елементах і фільтрах) і б) затримка перетворення сигналу в цифрову форму (затримка компаратору чи час перетво рення в АЦП). Основу власної затримки випромінювача складає затримка в логічних елемента х синхронізації сигналу, що випромінюється, та затримка вихідного потужного вентиля. Якщо ви користовують спільний для двох п'єзоелектричних елементів канал підсилення і один електронний формувач сигналу, що випромінюється, то часткові різниці Dиз1 - Dиз 2 і Dпр1 - D пр2 можуть бути нехтовно малими. Тому у ви разі (1) практично точно можно вважати: Т1-Т2=t1 - t2. V= L T1 - T 2 × , cos a (T11 - T1 + T 22 - T2 )2 ( 5) де L - шлях акустичного сигналу в рідині або газі, що рухається, a - кут між вектором швидкості руху рідини або газу і напрямком проходження акустичного сигналу. Для вимірювання часових проміжків Т1, Т2, Т11 і Т22 необхідно застосовувати метод, який забезпечував би достатню точність і роздільну здатність на рівні 0,05... 0,50 нс при середніх значеннях проміжків часу 100...1000 мкс. Наведемо основні шляхи вирішення цієї задачі. Проміжки часу Т1, Т2, Т11 і Т22 можна вимірювати шляхом підрахун ку кількості імпульсів високочастотного електричного сигналу ста більної частоти за інтервал часу між моментом випромінення і подією отримання відповідних прямих і відбитих акустичних сигналів. Достатньої роздільної здатності можна досягти завдяки надвисокій частоті заповнення або застосовуючи багато циклів ви мірювання для кожного з параметрів Т1, Т2, Т11 і Т22 з наступним усередненням результа тів. Роздільна здатність цього методу до рівнює періоду частоти заповнення, поділеному на корінь квадратний від кількості циклів ви мірювань. Суттєво зменши ти часто ту заповнення і кількість циклів ви мірювання проміжків часу Т1, Т2, Т11 і Т22 можна шля хом підрахун ку кількості імпульсів ви сокочастотного електричного сигналу ста більної часто ти за ін тер вал ча су, що відповідає певній кількості цик лів вип ромінювання. При цьому кожний новий акустичний сигнал в серії вип ромінюєть ся безпосередньо після отримання акустичного си гналу, який було випромінено у циклі, що йо му пе редував. Роз дільна здатність цього методу до рівнює періоду частоти за повнення, поділе ному на кількість цик лів ви мірювань в се рії. (4) При обчисленні добутку Т1 х Т2 всі додаткові затримки перемножуються одна на одну та ск ладаються з одним знаком, що призводить до великих похибок визначення швидкості за формулою (1). Найбільш близьким до запропонованого винаходу є спосіб вимірювання витрати рідини [2], який полягає у ви мірюванні часу проходження акустичних сигналів від одного п'єзоелектричного елементу до другого навпроти р уху рідини або газу (Т1) і в напрямку цього руху (Т2) та в обчисленні швидкості руху рі дини або газу за формулою (1). Цей спосіб передбачає часткову компенсацію похибок, що згадані вище, за допомогою застосування додаткового компенсаційного циклу ви мірювання, в котрому відбувається пряме вимірювання затримок Dиз1 + Dпр1 і D из2 + Dпр2 з наступ ним їх видаленням з виразу (3) розрахун ковим шляхом. Прототип має недостатню точність: а) в додатковому компенсаційному циклі вимірювання неможливо врахува ти вплив затримок Dст1 і Dст2 вимірювального ланцюга повністю вилучаєть ся ділянка розповсюдження сигналу в акустичній формі; б) результат виміру затримок Dиз1 + Dпр1 і Dиз2 + 2 40767 Проміжки часу Т1,Т2, Т11 і Т22 можна вимірювати шляхом пошуку максимуму кореляційної функції сигналів, що були випромінені, та відповідних прямих і відбитих акустичних сигналів, що були отримані [3]. Цей метод дозволяє отримати достатню роздільну здатність всього за один цикл випромінення, якщо шукати максимум кореляційної функції за її аналітичною апроксимацією. Ще більшу точність і роздільну здатність за один цикл випромінювань можна отримати, якщо вимірювати безпосередньо різницю ча сових проміжків Т1 і Т2 шляхом пошуку максимуму кореляційної функції відповідних акустичних сигналів, що були отримані. При цьому завдяки ідентичності спектрів отриманих сигналів кореляційна функція стає більш гострою і симетричною, що полегшує процес пошуку її максимуму і зменшує ре лаксаційні похибки. Запишемо вирази, які визначають затримки часу отримання перших відбитих сигналів: ричний сигнал вільної форми з певними параметрами. Довжина цього сигналу повинна бути меншою загального часу проходження акустичного сигналу від одного п'єзоелектричного елементу до другого туди й назад через рідину або газ, що рухаєть ся, а спектральний склад повинен відповідати смузі пропускання п'єзоелектричних елементів 7 і 8. Цей сигнал може бути: а) поодиноким прямокутним імпульсом; б) регулярною послідовністю однакових прямокутних імпульсів; в) псевдовипадковою (по довжині імпульсів і пауз між ними) послідовністю прямокутних імпульсів; г) аналоговим сигналом загального вигляду, тобто зі змінною амплітудою, фа зою і частотою. На далі цей сигнал підсилюється формувачем 2 сигналу, що випромінюється, і надхо дить через комутатор 4 на п'єзоелектричний елемент 7 або 8 (в залежності від напрямку випромінення). Сигнал, який прийнято іншим п'єзоелектричним елементом (відповідно, 8 або 7), через комутатор 5 надхо дить на підсилювач-перетворювач 3, котрий в найпростішому випадку може бути звичайним підсилювачем-обмежувачем або компаратором, а в більш інтелектуальних приладах - швидкодіючим аналого-цифровим перетворювачем. Вихід підсилювача-перетворювача 3 підключено до входу IN цифрового управляючого пристрою 1. Вихід DIR цифрового управляючого пристрою 1 з'єднано з входами управління комутаторів напрямку вип ромінення 4 і 5, і, таким чином, рівень логічного сигналу на цьому виході визначає напрямок випромінення. Цифровий управляючий пристрій 1 виконує вимірювання проміжків часу Т1, Т2, Т11 и Т22 (а також безпосередньо Т1 - Т2) і обчислення за формулою (4). Спосіб вимірювання вказаних проміжків часу, який реалізується в цифровому уп равляючому пристрої 1, не має значення для даного винаходу, але залежить від точності, яку необхідно досягти, та від конкретної реалізації підсилювачаперетворювача 3. У найпростіших приладах, де застосовано підсилювач-перетворювач 3 у вигляді компаратора чи тригера Шмітта, ци фровий уп равляючий пристрій 1 звичайно виконує ви мірювання проміжків часу шляхом підрахун ку кількості імпульсів ви сокочастотного електричного сигналу ста більної частоти за один цикл випромінення, середньої кількості імпульсів за кілька циклів випромінення або загальної кількості імпульсів за певне число циклів випромінення, що слідують безпосередньо один за одним. Більш високої точності та роздільної здатності можна досягти в приладах, де застосовано підсилювач-перетворювач 3 у вигляді АЦП, а цифровий управляючий пристрій 1 виконує вимірювання проміжків часу шля хом пошуку максимуму кореляційної функції відповідних сигналів, що були випромінені й отримані. Можлива побудова приладу, який має підсилювач-перетворювач 3 у вигляді компаратора чи тригера Шмітта, а цифровий управляючий пристрій 1 виконує ви мірювання проміжків часу шляхом пошуку максимуму кореляційної функції. Високої точності таким чином теж можна досягти, але за рахунок більш довгих у ча сі і складних сигналів, що випромінюються, та відповідно більш складних і довгих обчислювальних операцій підчас розра Т11=Dиз1+Dст1+t1+t2+Dст 2+Dпр2; (6) Т12=Dиз2+Dст2+t2+t1+Dст 1+Dпр1; Якщо підставити у ви раз (5) значення параметрів Т1, Т2, Т11 і Т22 з виразів (3) і (6), отримуємо: V= L t1 - t2 × , cos a ( t1 + t2 )2 (7) Таким чином досягнуто новий технічний результат, а са ме: вимірювання швидкості руху рідини або газу відповідно з фінішною формулою (7) не має складових, які пов'язані з часовими затримками у випромінювачі, приймачі та у стін ках трубопроводу, а то му не має й похибок, які спричинені вільною зміною цих затримок у часі і з температурою. На фігурі 1 наведено приклад виконання витратоміру, тобто вимірювача швидкості рідини або газу в тр убопроводі фіксованого діаметру, в котрому може бути застосовано спосіб, який запропоновано у да ному ви наході. Витратомір має в своєму складі цифровий управляючий пристрій 1, формувач 2 сигналу, що випромінюється, підсилювач-перетворювач 3 сигналу, що приймається, комутатори напрямку випромінення 4 і 5, корпус 6 датчика витратоміру, в котрому розташовані п'єзозлектричні елементи 7 і 8. Суттєвою є вимога, щоб робочі поверхні п'єзоелектричних елементів 7 і 8, а також поверхні корпуса 6 датчика витратоміру, що безпосередньо до них прилягають і відокремлюють їх від потоку рідини або газу, лежали б на вісі проходження акустичного сигналу, були б перпендикулярні до цієї вісі і, в наслідок цього, були б паралельні один до одного. Кармани (як показано на фігурі 1) або виступи у корпусі 6 датчика витратоміру у місцях кріплення саме надають можливість задовольнити цю вимогу. Витратомір працює наступним чином. Цифровий управляючий пристрій 1 (функції котрого може виконувати мікрокомп'ютер, однокристальний мікроконтролер або ж логічна цифрова схема) формує на своєму сигнальному ви ході OUT елект 3 40767 хун ків кореляційних функцій, що потребує застосуван ня цифрового управляючого пристрою 1 високої потужності. На фігурі 2 наведено приклад імпульсної діаграми роботи витратоміру, який реалізує спосіб вимірювання швидкості рідини або газу у відповідності з даним винаходом. Наведено сигнали, які існують на сигнальному виході OUT, на виході напрямку випромінення DIR, на вході S підсилювачаперетворювача 3 сигналу, що приймається, і на вхо ді IN цифрового управляючого пристрою 1. Імпульсна діаграма поділена на чотири фази: І - випромінення навпроти те чії та отримання прямого сигналу; II - три мання першого відбитого сигналу після випромінення проти течії; III -випромінення у напрямку те чії та отримання прямого сигналу; IV отримання першого відбитого сигналу після випромінення у напрямку течії. Таким чином можна стверджувати, що можна отримати істотне підвищення точності ви мірю вань швидкості рідини або газу, то му що згідно з запропонованим способом отримується результат повністю вільний від похибок, що спричинені власними затримками випромінювача, приймача і часом розповсюдження акустичного сигналу у корпусах п'єзоелектричних елементів та їх змінами у часі і з температурою. Література 1. Измерения в промышленности / Под редакцией П. Профоса. М.: Металлур гия. 1980. С. 355...357. 2. Фаес Ив (Faes Ives), Каль Карно (Qual Camot). Способ и установка для измерения расхода жидкости при помощи ультразвука // Заявка на получе ние патента ЕПВ № 0162987 от 4 декабря 1984г. 3. Макс Ж. Ме тоды и техника обработки сигналов при физических измерениях. В 2-х т. - М.: Мир, 1983.- T.1, с. 234 - 235. Фіг. 1 Фіг. 2 Тираж 50 екз. Відкрите акціонерне товариство «Патент» Україна, 88000, м. Ужгород, вул. Гагаріна, 101 (03122) 3 – 72 – 89 (03122) 2 – 57 – 03 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of measuring fluid or gas motion speed in pipeline
Автори англійськоюLezhoiev Rostyslav Stanislavovych
Назва патенту російськоюСпособ измерения скорости жидкости или газа в трубопроводе
Автори російськоюЛежоев Ростислав Станиславович
МПК / Мітки
МПК: G01F 1/66
Мітки: швидкості, вимірювання, рідини, спосіб, газу, трубопроводі
Код посилання
<a href="https://ua.patents.su/4-40767-sposib-vimiryuvannya-shvidkosti-ridini-abo-gazu-v-truboprovodi.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання швидкості рідини або газу в трубопроводі</a>
Спосіб вимірювання та датчик швидкості і витрат рідини або газу
Номер патенту: 40483
Опубліковано: 16.07.2001
Автори: Єгупов Сергій Іванович, Скрищевський Валерій Антонович, Третяк Олег Васильович, Устилко Володимир Юхимович, Кузнецов Геннадій Васильович, Жигун Віталій Якович
МПК: G01F 1/68
Мітки: витрат, рідини, датчик, швидкості, вимірювання, спосіб, газу
Формула / Реферат:
1. Спосіб визначення швидкості та витрати рідини або газу, що полягає в тому, що пропускають електричний струм через розміщений усередині відрізка трубопроводу термоелектричний напівпровідниковий датчик, вимірюють напругу на термоелектричному напівпровідниковому датчику і розраховують швидкість потоку та витрати рідини або газу по виміряному значенню напруги, який відрізняється тим, що всередині відрізка труби розміщують захищений від дії...
Спосіб вимірювання швидкості потоку газу або рідини
Номер патенту: 11826
Опубліковано: 25.12.1996
Автори: Охрімович Віталій Йосипович, Корнієнко Олег Петрович, Ранченко Генадій Степанович
МПК: G01P 5/10, G01F 1/00, G01S 15/00
Мітки: рідини, швидкості, спосіб, вимірювання, потоку, газу
Формула / Реферат:
Способ измерения скорости потока газа или жидкости, заключающийся в расположении в потоке термочувствительной поверхности, нанесенной на торец цилиндрической подложки, перегреве ее относительно потока и регистрации изменений параметров термочувствительной поверхности под действием потока, по которым судят о скорости газа пли жидкости, отличающийся тем, что, с целью повышения точности измерений, термочувствительную поверхность располагают...
Спосіб електричного вимірювання швидкості потоку рідини
Номер патенту: 30051
Опубліковано: 15.11.2000
Автори: Смирнитська Майя Борисівна, Смирнитський Борис Васильович
Мітки: спосіб, вимірювання, рідини, потоку, швидкості, електричного
Формула / Реферат:
Спосіб електричного вимірювання швидкості (витрат) потоку рідини шляхом виміряння і відношення струмів, що протікають у рідині, яка рухається у міжелектродному просторі, який відрізняється тим, що одночасно вимірюють в одному об'ємі рідини постійний струм, пропорційний провідності і швидкості потоку рідини, і змінний струм, пропорційний провідності, порівнюючи ці струми, визначають швидкість (витрати) потоку рідини.
Пристрій для вимірювання швидкості конвективних потоків газу
Номер патенту: 28599
Опубліковано: 16.10.2000
Автори: Скриль Іван Никифорович, Кущинський Олег Вячеславович
МПК: G01P 5/00
Мітки: газу, конвективних, швидкості, потоків, вимірювання, пристрій
Формула / Реферат:
Пристрій для вимірювання швидкості конвективних потоків газу, який містить корпус з розташованим у ньому тахогенератором, з'єднаним дротом з вимірювальним пультом, який відрізняється тим, що чутливий елемент, наприклад, у вигляді напівциліндрів, тахогенератора встановлено на вісі з постійним магнітом, а кінні вісі встановлено на двох підшипниках, які розташовані в опорах корпусу, а котушки статору виконані без металевих осередців.
Ультразвуковий спосіб вимірювання витрат рідини в трубопроводі
Номер патенту: 29777
Опубліковано: 15.11.2000
Автори: Сорокопут Валерій Леонідович, Костильов Володимир Васильович, Стеценко Андрій Анатолійович, Близнюк В'ячеслав Іванович
МПК: G01F 1/66
Мітки: спосіб, витрат, трубопроводі, ультразвуковий, вимірювання, рідини
Формула / Реферат:
1. Ультразвуковой способ измерения расхода жидкости в трубопроводе, включающий операции наклонного по отношению к потоку излучения ультразвуковых колебаний в транспортируемую жидкость, приема колебаний, формирования первого и второго сигналов, пропорциональных времени задержки колебаний от передающего преобразователя до приемного при излучении по потоку и против потока жидкости соответственно, последующего формирования третьего сигнала,...
Попередній патент: Пристрій для гістеросальпінгографії, внутрішньоматкового введення лікарських препаратів і аспіраційно- промивного дренажування порожнини матки
Наступний патент: Спосіб одержання магній-цинкового феритового порошку
Випадковий патент: Пристрій для очищення від окалини гарячекатаної штаби