Пристрій для нормування похибок кутових положень крокових двигунів
Номер патенту: 40873
Опубліковано: 27.04.2009
Формула / Реферат
Пристрій для нормування похибок кутових положень крокових двигунів, що містить корпус, на якому закріплений досліджуваний кроковий двигун, мікропроцесорний контролер, що містить таймер-лічильник, перші одинадцять виходів якого підключені до одинадцятирозрядної вихідної шини, блок керування, виходи якого підключені до чотирирозрядної вихідної шини, що з'єднана з обмотками досліджуваного крокового двигуна, через одинадцятирозрядну вихідну шину блок керування підключений до мікропроцесорного контролера, фотоелектричний сенсор кута повороту, перший вихід якого з'єднаний з першим входом мікропроцесорного контролера, D-тригер, перший вхід якого підключений до другого виходу фотоелектричного сенсора кута повороту, а другий вхід з'єднаний з третім входом фотоелектричного сенсора кута повороту, муфту спряження, яка з'єднує вали досліджуваного крокового двигуна та фотоелектричного сенсора кута повороту, який відрізняється тим, що в нього введені перший логічний елемент І, перший вхід якого підключений до другого входу фотоелектричного сенсора кута повороту, а другий вхід з'єднаний з першим виходом D-тригера, другий логічний елемент І, перший вхід якого підключений до другого входу фотоелектричного сенсора кута повороту, а другий вхід з'єднаний з другим виходом D-тригера, реверсивний двійковий лічильник, перший вхід якого підключений до третього входу мікропроцесорного контролера, другий вхід якого з'єднаний з виходом першого логічного елемента І, а третій вхід підключений до виходу другого логічного елемента І, восьмирозрядну вихідну шину, що з'єднана з виходами реверсивного двійкового лічильника та підключена до других восьми входів мікропроцесорного контролера, послідовний інтерфейс, вихід якого з'єднаний з третім входом мікропроцесорного контролера, а вхід підключений до другого виходу мікропроцесорного контролера, системний канал, персональний комп'ютер, що з'єднаний з послідовним інтерфейсом через системний канал.
Текст
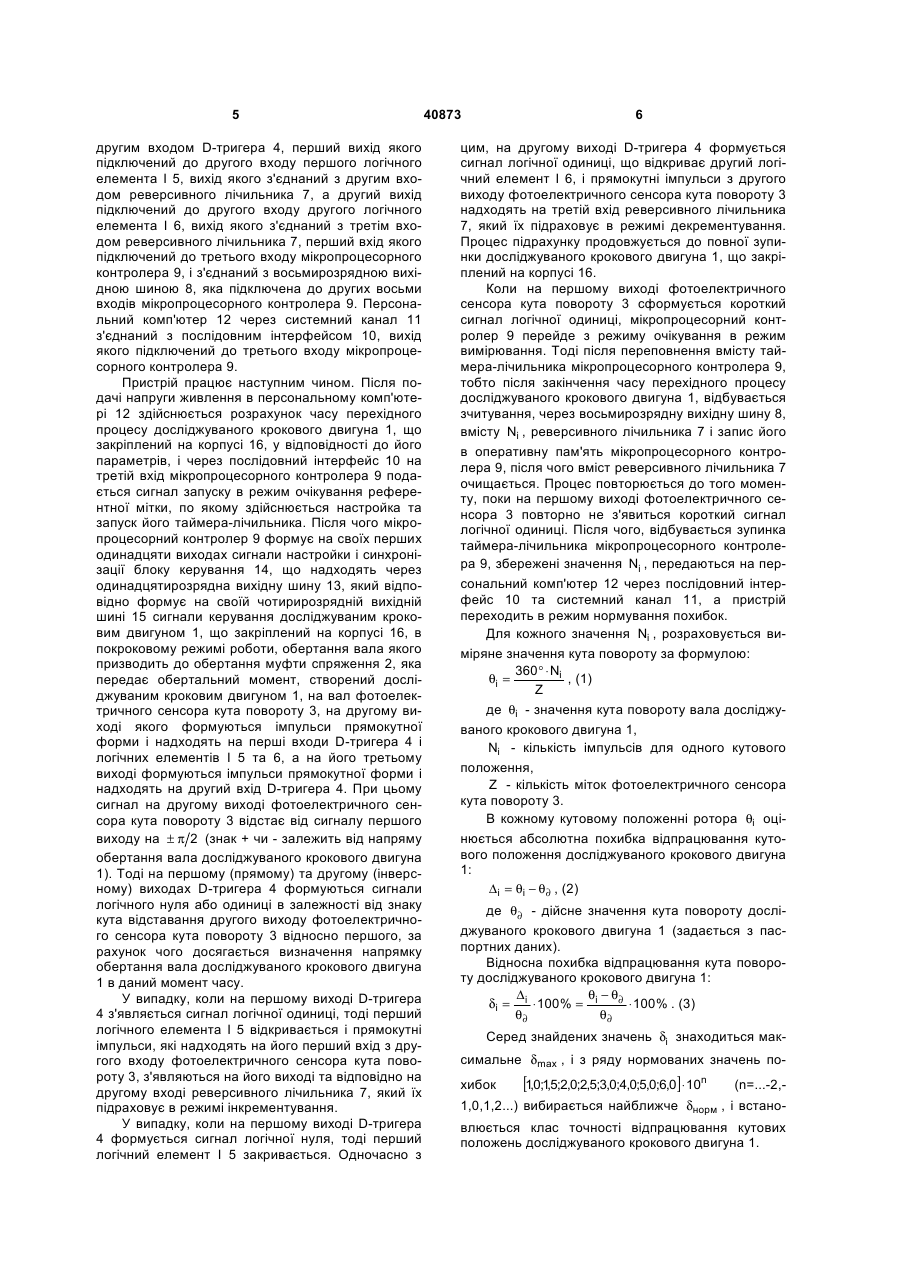
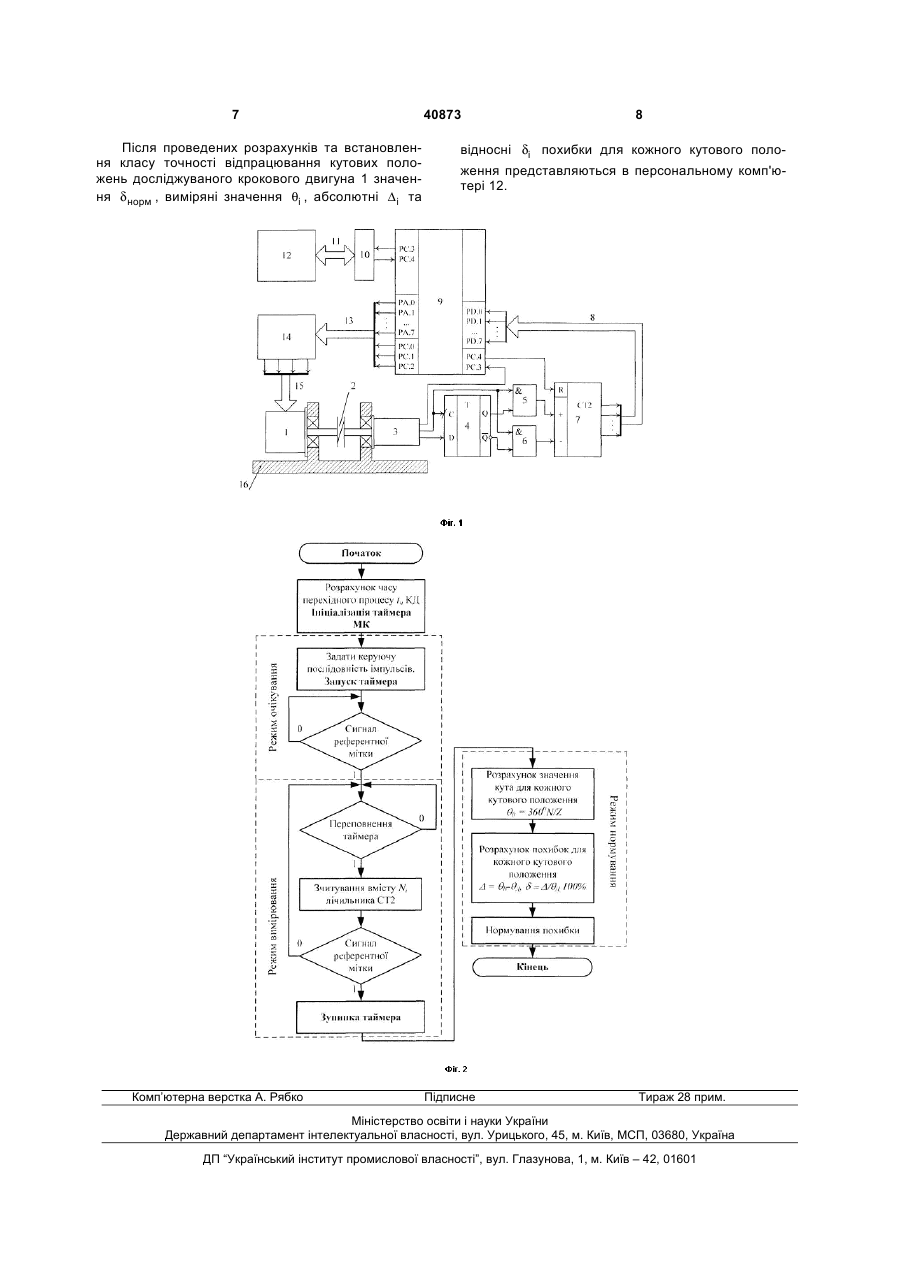
Пристрій для нормування похибок кутових положень крокових двигунів, що містить корпус, на якому закріплений досліджуваний кроковий двигун, мікропроцесорний контролер, що містить таймерлічильник, перші одинадцять виходів якого підключені до одинадцятирозрядної вихідної шини, блок керування, виходи якого підключені до чотирирозрядної вихідної шини, що з'єднана з обмотками досліджуваного крокового двигуна, через одинадцятирозрядну вихідну шину блок керування підключений до мікропроцесорного контролера, фотоелектричний сенсор кута повороту, перший вихід якого з'єднаний з першим входом мікропроцесорного контролера, D-тригер, перший вхід якого підключений до другого виходу фотоелектричного сенсора кута повороту, а другий вхід з'єднаний з третім входом фотоелектричного сен U 2 (19) 1 3 Найбільш близьким по технічній суті до корисної моделі, що заявляється, є пристрій для нормування похибки кута повороту крокового двигуна [Патент №19455 (Україна), МПК(2006) G01В11/26, Заявл. 26.06.2006, Опубл. 15.12.2006, Бюл. №12, 2006], що містить корпус з посадочним гніздом для досліджуваного крокового двигуна, мікропроцесорний контролер, перші одинадцять виходів якого підключені до одинадцятирозрядної вихідної шини, а другі десять виходів з'єднані з десятирозрядною вихідною шиною, який містить таймер-лічильник та енегрозалежну пам'ять, блок керування, виходи якого підключені до вихідної чотирирозрядної шини, яка з'єднана з обмотками досліджуваного крокового двигуна, через одинадцятирозрядну вихідну шину блок керування підключений до мікропроцесорного контролера, фотоелектричний сенсор кута повороту, перший і третій виходи якого з'єднані з другим і першим входами мікропроцесорного контролера, D-тригер, перший і другий входи якого підключені до другого і першого виходів фотоелектричного сенсора, а вихід з'єднаний з третім входом мікропроцесорного контролера, блок індикації, який через десятирозрядну вихідну шину підключений до мікропроцесорного контролера, редуктор, що містить першу і другу шестерні, перша шестерня якого закріплена на валу досліджуваного крокового двигуна, муфту спряження, яка закріплена на валу другої шестерні прецизійного редуктора і валу фотоелектричного сенсора. Головним недоліком описаного пристрою є програмний підрахунок імпульсів з виходу фотоелектричного сенсора кута повороту, що призводить до їх пропуску і зниження точності вимірювання, при одночасному керуванні досліджуваним кроковим двигуном. Крім того, блок індикації має обмежені функції, що не дозволяють представити результати оцінювання похибок кутових положень різними способами. Також наявність люфтів в редукторі призводить до появи додаткових похибок. В основу корисної моделі поставлено задачу створення пристрою для нормування похибок кутових положень крокових двигунів, в якому, за рахунок введення нових блоків та зв'язків між ними, з'являється можливість уникнути пропуску імпульсів з виходу фотоелектричного сенсора кута повороту, шляхом апаратного їх підрахунку та використання персонального комп'ютера для обробки та представлення результатів оцінювання похибок кутових положень. Крім того, зменшуються люфти в з'єднанні крокового двигуна і фотоелектричного сенсора кута повороту, за рахунок безпосереднього їх підключення за допомогою муфти спряження без редуктора. Це дозволяє підвищити точністю вимірювання. Поставлена задача вирішується тим, що в пристрій для нормування похибок кутових положень крокових двигунів, який містить корпус, на якому закріплений досліджуваний кроковий двигун, мікропроцесорний контролер, що містить таймерлічильник, перші одинадцять виходів якого підключені до одинадцятирозрядної вихідної шини, блок керування, виходи якого підключені до чотирирозядної вихідної шини, що з'єднана з обмотками досліджуваного крокового двигуна, через оди 40873 4 надцятирозрядну вихідну шину блок керування підключений до мікропроцесорного контролера, фотоелектричний сенсор кута повороту, перший вихід якого з'єднаний з першим входом мікропроцесорного контролера, D-тригер, перший вхід якого підключений до другого виходу фотоелектричного сенсора кута повороту, а другий вхід з'єднаний з третім входом фотоелектричного сенсора кута повороту, муфту спряження, яка з'єднує вали досліджуваного крокового двигуна та фотоелектричного сенсора кута повороту, введено перший логічний елемент І, перший вхід якого підключений до другого входу фотоелектричного сенсора кута повороту, а другий вхід з'єднаний з першим виходом D-тригера, другий логічний елемент І, перший вхід якого підключений до другого входу фотоелектричного сенсора кута повороту, а другий вхід з'єднаний з другим виходом D-тригера, реверсивний двійковий лічильник, перший вхід якого підключений до третього входу мікропроцесорного контролера, другий вхід якого з'єднаний з виходом першого логічного елементу І, а третій вхід підключений до виходу другого логічного елементу І, восьмирозрядну вихідну шину, що з'єднана з виходами реверсивного двійкового лічильника та підключена до других восьми входів мікропроцесорного контролера, послідовний інтерфейс, вихід якого з'єднаний з третім входом мікропроцесорного контролера, а вхід підключений до другого виходу мікропроцесорного контролера, системний канал, персональний комп'ютер, що з'єднаний з послідовним інтерфейсом через системний канал. На Фіг.1 подана структурна схема пристрою для нормування похибок кутових положень крокових двигунів, на Фіг.2 представлено етапи роботи пристрою для нормування похибок кутових положень крокових двигунів. Пристрій містить: 1 - досліджуваний кроковий двигун, 2 - муфта спряження, 3 - фотоелектричний сенсор кута повороту, 4 - D-тригер, 5 - перший логічний елемент І, 6 - другий логічний елемент І, 7 реверсивний двійковий лічильник, 8 - восьмирозрядна вихідна шина, 9 - мікропроцесорний контролер, 10 - послідовний інтерфейс, 11 - системний канал, 12 - персональний комп'ютер, 13 - одинадцяти розрядна вихідна шина, 14 - блок керування, 15 - чотирирозрядна вихідна шина, 16 - корпус. При цьому перші одинадцять виходів мікропроцесорного контролера 9 з'єднані з одинадцятирозрядною вихідною шиною 13, що підключена до блоку керування 14, виходи якого з'єднані з чотирирозрядною вихідною шиною 15, що підключена до обмоток досліджуваного крокового двигуна 1, який закріплений на корпусі 16, а другий вихід мікропроцесорного контролера 9 з'єднаний з входом послідовного інтерфейсу 10. Перший вихід фотоелектричного сенсора кута повороту 3, що закріплений на корпусі 16 та підключений до вала досліджуваного крокового двигуна 1 через муфту спряження 2, з'єднаний з першим входу мікропроцесорного контролера 9, другий вихід підключений до першого входу D-тригера 4, до першого входу першого логічних елементів І 5 і до першого входу другого логічних елементів І 6, третій вихід фотоелектричного сенсора кута повороту 3 з'єднаний з 5 другим входом D-тригера 4, перший вихід якого підключений до другого входу першого логічного елемента І 5, вихід якого з'єднаний з другим входом реверсивного лічильника 7, а другий вихід підключений до другого входу другого логічного елемента І 6, вихід якого з'єднаний з третім входом реверсивного лічильника 7, перший вхід якого підключений до третього входу мікропроцесорного контролера 9, і з'єднаний з восьмирозрядною вихідною шиною 8, яка підключена до других восьми входів мікропроцесорного контролера 9. Персональний комп'ютер 12 через системний канал 11 з'єднаний з послідовним інтерфейсом 10, вихід якого підключений до третього входу мікропроцесорного контролера 9. Пристрій працює наступним чином. Після подачі напруги живлення в персональному комп'ютері 12 здійснюється розрахунок часу перехідного процесу досліджуваного крокового двигуна 1, що закріплений на корпусі 16, у відповідності до його параметрів, і через послідовний інтерфейс 10 на третій вхід мікропроцесорного контролера 9 подається сигнал запуску в режим очікування референтної мітки, по якому здійснюється настройка та запуск його таймера-лічильника. Після чого мікропроцесорний контролер 9 формує на своїх перших одинадцяти виходах сигнали настройки і синхронізації блоку керування 14, що надходять через одинадцятирозрядна вихідну шину 13, який відповідно формує на своїй чотирирозрядній вихідній шині 15 сигнали керування досліджуваним кроковим двигуном 1, що закріплений на корпусі 16, в покроковому режимі роботи, обертання вала якого призводить до обертання муфти спряження 2, яка передає обертальний момент, створений досліджуваним кроковим двигуном 1, на вал фотоелектричного сенсора кута повороту 3, на другому виході якого формуються імпульси прямокутної форми і надходять на перші входи D-тригера 4 і логічних елементів І 5 та 6, а на його третьому виході формуються імпульси прямокутної форми і надходять на другий вхід D-тригера 4. При цьому сигнал на другому виході фотоелектричного сенсора кута повороту 3 відстає від сигналу першого виходу на ± π 2 (знак + чи - залежить від напряму обертання вала досліджуваного крокового двигуна 1). Тоді на першому (прямому) та другому (інверсному) виходах D-тригера 4 формуються сигнали логічного нуля або одиниці в залежності від знаку кута відставання другого виходу фотоелектричного сенсора кута повороту 3 відносно першого, за рахунок чого досягається визначення напрямку обертання вала досліджуваного крокового двигуна 1 в даний момент часу. У випадку, коли на першому виході D-тригера 4 з'являється сигнал логічної одиниці, тоді перший логічного елемента І 5 відкривається і прямокутні імпульси, які надходять на його перший вхід з другого входу фотоелектричного сенсора кута повороту 3, з'являються на його виході та відповідно на другому вході реверсивного лічильника 7, який їх підраховує в режимі інкрементування. У випадку, коли на першому виході D-тригера 4 формується сигнал логічної нуля, тоді перший логічний елемент І 5 закривається. Одночасно з 40873 6 цим, на другому виході D-тригера 4 формується сигнал логічної одиниці, що відкриває другий логічний елемент І 6, і прямокутні імпульси з другого виходу фотоелектричного сенсора кута повороту 3 надходять на третій вхід реверсивного лічильника 7, який їх підраховує в режимі декрементування. Процес підрахунку продовжується до повної зупинки досліджуваного крокового двигуна 1, що закріплений на корпусі 16. Коли на першому виході фотоелектричного сенсора кута повороту 3 сформується короткий сигнал логічної одиниці, мікропроцесорний контролер 9 перейде з режиму очікування в режим вимірювання. Тоді після переповнення вмісту таймера-лічильника мікропроцесорного контролера 9, тобто після закінчення часу перехідного процесу досліджуваного крокового двигуна 1, відбувається зчитування, через восьмирозрядну вихідну шину 8, вмісту Ni , реверсивного лічильника 7 і запис його в оперативну пам'ять мікропроцесорного контролера 9, після чого вміст реверсивного лічильника 7 очищається. Процес повторюється до того моменту, поки на першому виході фотоелектричного сенсора 3 повторно не з'явиться короткий сигнал логічної одиниці. Після чого, відбувається зупинка таймера-лічильника мікропроцесорного контролера 9, збережені значення Ni , передаються на персональний комп'ютер 12 через послідовний інтерфейс 10 та системний канал 11, а пристрій переходить в режим нормування похибок. Для кожного значення Ni , розраховується виміряне значення кута повороту за формулою: 360 ° ⋅ Ni , (1) θi = Z де θi - значення кута повороту вала досліджуваного крокового двигуна 1, Ni - кількість імпульсів для одного кутового положення, Z - кількість міток фотоелектричного сенсора кута повороту 3. В кожному кутовому положенні ротора θi оцінюється абсолютна похибка відпрацювання кутового положення досліджуваного крокового двигуна 1: ∆i = θi − θ∂ , (2) де θ∂ - дійсне значення кута повороту досліджуваного крокового двигуна 1 (задається з паспортних даних). Відносна похибка відпрацювання кута повороту досліджуваного крокового двигуна 1: ∆ θ − θ∂ δi = i ⋅ 100% = i ⋅ 100% . (3) θ∂ θ∂ Серед знайдених значень δi знаходиться максимальне δmax , і з ряду нормованих значень похибок [1,0;1,5;2,0;2,5;3,0;4,0;5,0;6,0]⋅ 10n (n=...-2, 1,0,1,2...) вибирається найближче δнорм , і встановлюється клас точності відпрацювання кутових положень досліджуваного крокового двигуна 1. 7 Після проведених розрахунків та встановлення класу точності відпрацювання кутових положень досліджуваного крокового двигуна 1 значення δ норм , виміряні значення θi , абсолютні ∆ i та Комп’ютерна верстка А. Рябко 40873 8 відносні δi похибки для кожного кутового положення представляються в персональному комп'ютері 12. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for standardization of errors of angular positions of stepping motors
Автори англійськоюKukharchuk Vasyl Vasyliovych, Usov Viktor Vasyliovych
Назва патенту російськоюУстройство для нормировки погрешностей угловых положений шаговых двигателей
Автори російськоюКухарчук Василий Васильевич, Усов Виктор Васильевич
МПК / Мітки
МПК: G01B 11/26
Мітки: двигунів, кутових, пристрій, положень, крокових, нормування, похибок
Код посилання
<a href="https://ua.patents.su/4-40873-pristrijj-dlya-normuvannya-pokhibok-kutovikh-polozhen-krokovikh-dviguniv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для нормування похибок кутових положень крокових двигунів</a>
Пристрій автоматизованого контролю статичних та квазідинамічних характеристик крокових двигунів
Номер патенту: 35497
Опубліковано: 25.09.2008
Автори: Кухарчук Василь Васильович, Усов Віктор Васильович
МПК: G01B 11/26
Мітки: контролю, статичних, двигунів, характеристик, пристрій, квазідинамічних, крокових, автоматизованого
Формула / Реферат:
Пристрій автоматизованого контролю статичних та квазідинамічних характеристик крокових двигунів, що містить підсилювач, який відрізняється тим, що в нього введено мікропроцесорний контролер, перші одинадцять виходів якого з'єднані з одинадцятирозрядною вихідною шиною, другі вісім виходів підключені до восьмирозрядної вихідної шини, третій вихід з'єднаний з входом послідового інтерфейсу, що підключений до персонального комп'ютера через...
Пристрій для нормування похибки кута повороту крокового двигуна

Номер патенту: 19455
Опубліковано: 15.12.2006
Автори: Усов Віктор Васильович, Кухарчук Василь Васильович
МПК: G01B 11/26
Мітки: нормування, кута, пристрій, крокового, двигуна, похибки, повороту
Формула / Реферат:
Пристрій для нормування похибки кута повороту крокового двигуна, що містить корпус з посадочним гніздом для досліджуваного крокового двигуна і вихідну шину, який відрізняється тим, що в нього введені мікропроцесорний контролер, який містить таймер-лічильник та енергозалежну пам'ять, перші одинадцять виходів якого підключені до одинадцятирозрядної вихідної шини, а другі десять виходів з'єднані з десятирозрядною вихідною шиною, причому блок...
Стенд для вимірювання похибок позиціювання валів крокових двигунів

Номер патенту: 15258
Опубліковано: 30.06.1997
Автори: Тирса Валентин Остапович, Алексеєв Валерій Олександрович, Богатиренко Костянтин Іванович, Горушкін Олександр Віталійович
МПК: G01B 11/26, G05B 19/40
Мітки: вимірювання, стенд, крокових, позиціювання, похибок, двигунів, валів
Пристрій для моніторингу асинхронних двигунів
Номер патенту: 12182
Опубліковано: 16.01.2006
Автори: Мокін Борис Іванович, Розводюк Михайло Петрович, Грабко Володимир Віталійович
МПК: G01R 31/34
Мітки: асинхронних, моніторингу, двигунів, пристрій
Формула / Реферат:
Пристрій для моніторингу асинхронних двигунів, що містить асинхронний двигун, тиристорний регулятор напруги, комутуючий апарат, три блоки однофазних контакторних апаратів, чотири пристрої керування трьома блоками однофазних контакторних апаратів та комутуючим апаратом, цифро-аналоговий перетворювач для керування тиристорним регулятором напруги та чотирма пристроями керування трьома блоками однофазних контакторних апаратів та комутуючим...
Спосіб виготовлення індукторів лінійних крокових електродвигунів
Номер патенту: 13148
Опубліковано: 28.02.1997
Автори: Ненека Мирослав Федорович, Малярчук Сергій Олександрович, Павлович Наталія Владиславівна
МПК: H02K 15/02
Мітки: виготовлення, електродвигунів, індукторів, крокових, спосіб, лінійних
Формула / Реферат:
(57) Способ изготовления индукторов линейных шаговых электродвигателей, согласно которому изготавливают заготовки в виде пустотелых цилиндров, образуют на внутренней поверхности заготовок зубцовые зоны винтовой нарезкой, разрезают заготовки вдоль оси на равные части, формируют зубцовую зону перестановкой частей заготовок, после чего части заготовок скрепляют, отличающийся тем, что разрезают заготовки попарно в местах совпадения фаз зубцовых...
Попередній патент: Привод гірничого комбайна
Наступний патент: Сушарка-водонагрівач
Випадковий патент: Хемосорбент діоксиду сірки