Планетарний редуктор
Номер патенту: 41505
Опубліковано: 17.09.2001
Автори: Стрельніков Віктор Микитович, Панков Віктор Андрійович, Севост'янов Сергій Вікторович

Формула / Реферат
Планетарний редуктор, який має швидкохідний вал з ексцентрично закріпленими втулками, на яких на підшипниках встановлені сателіти з зубами, близькими по формі до півкола, і циліндричними отворами для цівок зі втулками, а також ролики, закріплені на загальмованому і обертовому центральних зубчастих колесах, утворюючих зчеплення з зубами сателітів, який відрізняється тим, що він виконаний з вільно плаваючим колесом, середній диск якого розміщено між центральними сателітами, а два інших диски встановлені з зовнішнього боку крайніх сателітів, при цьому диски і сателіти зв'язані між собою цівками.
Текст
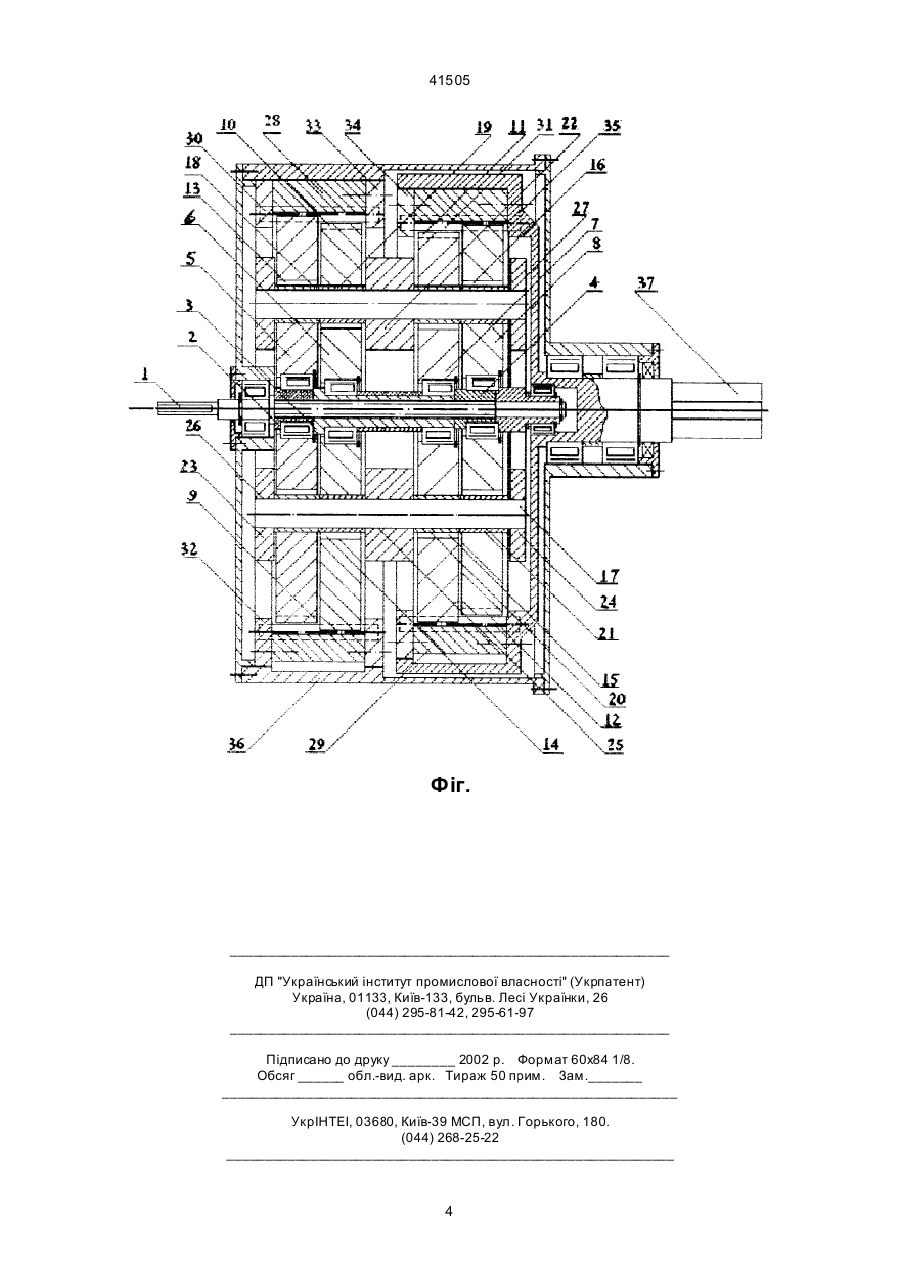
Планетарний редуктор, який має швидкохідний вал з ексцентрично закріпленими втулками, на 41505 В відомому редукторі ведучий вал має дві ексцентричні шийки, зуби планетарних коліс мають циклоїдний профіль. Зуби нерухомого колеса в вигляді пальців і роликів закріплені на корпусі редуктора. Інші пальці закріплені на фланці веденого валу. Наявність значних люфтів, які обумовлені необхідністю компенсації промислових відхилень при виготовленні деталей, усувається шляхом введення в конструкцію ролика пружного елемента у вигляді гумової втулки. Але таке конструктивне виконання обумовлює недоліки конструкції. Ролики встановлюються в вікна з натягом, але натяг створює тиск тільки в тангенціальному напрямі. Сили, які виникають від натягу, передаються на ексцентрики, вікна і ролики в вигляді додаткових навантажень при виконанні зборки і експлуатації редуктора. Це підвищує зношування елементів відомого редуктора. Циклоїдальні зуби складні в виготовленні і дуже чутливі до те хнологічних і монтажних похибок. А тому необхідним є введення компенсаторів виробничих похибок в вигляді пружних елементів з гуми, що ускладнює конструкцію і знижує навантажувальну спроможність відомого редуктора. Конструктивні відмінності відомого редуктора значно зменшують його кінематичну селективність порівняно невеликим діапазоном передаткових чисел від 16 до 85, що обмежує можливості їх застосування. В основу винаходу покладена задача створення планетарного редуктора більш простої конструкції з одночасним підвищенням навантажувальної спроможності і більш широким діапазоном передаткових чисел. Вирішення цієї задачі забезпечується за рахунок технічного результату, який полягає в тому, що між сателітами передбачається плаваючий кінематичний зв'язок. Для досягнення цього технічного результату, редуктор, який має швидкохідний вал з ексцентрично закріпленими втулками, на яких установлені на підшипниках сателіти з зубами, близькими по формі до напівкола і циліндричними отворами для цівок з втулками, а також ролики, закріплені на загальмованому і обертальному центральних зубчатих колесах і взаємодіючі з зубами сателітів, обладнаний вільно плаваючим цівочним колесом, середній диск якого розміщений між центральними сателітами, а два інших диска встановлені з зовнішньої сторони крайніх сателітів, при цьому диски і сателіти зв'язані між собою цівками. Між відмінними ознаками винаходу і досягнутим технічним результатом є причинно-наслідковий зв'язок. Для того, щоб між сателітами був встановлений плаваючий кінематичний зв'язок, необхідна така сукупність відмінних ознак: -наявність вільно плаваючого цівочного колеса, яке забезпечує плаваючий кінематичний зв'язок між сателітами; -розміщення середнього диска цівочного колеса між центральними сателітами і установка двох інших дисків з зовнішньої сторони крайніх сателітів, підвищуючи х жорсткість і міцність цівочного колеса, забезпечуючих високу надійність плаваючого кінематичного зв'язку між сателітами при передачі великих крутячих моментів; -зв'язок дисків і сателітів між собою цівками, спрощуючий виконання плаваючого кінематичного зв'язку між сателітами і підвищуючий його надійність під навантаженням. Виключення з наведеної сукупності відмінних признаків будь якого з них не дає змоги забезпечити досягнення нової якості - установки плаваючого кінематичного зв'язку між сателітами. Ця нова якість проявляється в корисності запропонованого редуктора - спрощується конструкція, підвищується його навантажувальна спроможність, знищується вартість виготовлення, розширюється діапазон передаткових чисел. Пропонований редуктор є самостійним функціональним вузлом, який може бути застосований в механічних приводах машин і обладнання різного функціонального і технічного призначення. Для детального вивчення рівня техніка була вивчена патентна документація, яка відноситься до планетарних редукторів загальномашинобудівного призначення: *заявки Великобританії, кл. F2Q; *заявки та патенти Японії, кл. 54А13, F16Н1/32, F16Н57/32, F16Н57/08; *заявки та патенти Франції, кл. F16Н1/32-1/34, F16Н25/06; *заявки та патенти ФРГ, кл. F16Н1/00, F16Н1/28; F16Н1/32, F16Н25/04, F16Н25/06, F16Н57/08; заявки та патенти США, кл. 74/800, 74/804, 74/805, 74/798, F16Н1/28, F16Н1/32, F16Н13/06, F16Н25/04; *авторські свідоцтва СРСР, кл. F16Н1/00, F16Н1/24, F16Н1/28, F16Н1/32, F16Н1/34. В даній інформації не виявлені рішення, які мають сукупність ознак, співпадаючих з відмінними ознаками винаходу. Таким чином винахід відповідає умовам новизни, тому що в рівні техніки не виявлені рішення, сукупність ознак, яких ідентична відмінним ознакам винаходу. В виявлених аналогах відсутні відомості, які могли б стати підказом для спеціаліста для конструювання більш досконалого редуктора. В нашому випадку задача рішена нетрадиційним шляхом і технічний результат не витікає з очевидністю із відомих рішень. Пропоноване рішення промислово-придатне воно використовується в промисловості і завдяки високим технічним параметрам і навантажувальному потенціалу найбільш ефективне для тяжкого машинобудування. По винаходу розроблена технічна пропорція. Запропонований винахід пояснюється кресленнями (фіг.), де планетарний редуктор показано в перерізі. Планетарний редуктор має швидкохідний шліцевий вал 1, на якому установлені ексцентричні шліцеві втулки 2, 3 і 4 з підшипниками, на котрих встановлені з ексцентриситетом "е" і в протифазі один відносно другого сателіти 5, 6, 7, 8, зуби яких 9, 10, 11, 12 по формі близькі до дуги кола. На сателітах виконані циліндричні отвори 13, 14, 15 і 16, в які встановлені цівки 17 зі втулками 18, 19, 20 і 21, вільно установленого цівочного колеса, середній диск 22 якого розміщено між центральними сателітами 6 і 7, а два інших диска 23 і 24 установлені з зовнішньої сторони крайніх сателітів 5 і 8, ідо забезпечує високу жорсткість конструкції цівочного колеса. При цьому жорсткий зв'язок цівок з дисками забезпечується натягом при насаді цівок 2 41505 в отвори 25, 26, 27 на дисках. Діаметри отворів 13, 14, 15, 16 більше відповідник діаметрів втулок 18, 19, 20, 21 на величину подвоєного ексцентриситету установки сателітів, тобто 2"е". Кінематичний зв'язок сателітів з допомогою цівок забезпечує обертання сателітів з однаковою швидкістю навколо своїх вісей. Центральні колеса 28, 29 виконані з внутрішніми зубами, що мають форму близьку до півкола, в яких установлені відповідні ролики 30, 31, закріплені з торців сепараторами 32, 33, 34, 35. Колесо 28 закріплено від обертання на корпусі 36 шпонкою, а колесо 29 аналогічно - на тихохідному валу 37. Зуби сателітів і центральних коліс утворюють між собою зчеплення з допомогою роликів 30, 31. Числа зубів сателітів 5 і 6 однакові і дорівнюють Z1, а у сателітів 7 і 8 – Z2. Центральні колеса 29 і 28 мають різні числа зубів відповідно Z3 і Z4. В конкретних випадках ролики 30 і 31, як і втулки 18, 19, 20, 21 можуть бути виконані із неметалічних конструкційних матеріалів таких, як поліуритан, фторопласт та ін. В даному випадку шумові характеристики редуктора різко зменшуються, але це також зменшує його несучу здатність. Редуктор діє так. Обертання швидкохідного валу 1 з частотою w1 через втулки 2, 3, 4 і підшипники переда ється сателітам 5, 6, 7, 8, а їх кінематичний зв'язок в зчепленні з центральними колесами 28, 29 через ролики 30, 31 і між собою з допомогою цівок 17, забезпечують сателітами 5, 6, 7, 8 обертання навколо рухомих вісей з однаковою кутовою швидкістю w0, а колесу 29 - обертання з кутовою швидкістю w2. Передаткове число редуктора U визначається відношенням кутови х швидкостей швидкохідного валу w2 w z - z3 U= 1 = 1 w2 z 2 - z1 При цьому, завдяки вільно плаваючому цівочному колесу, середній диск 22 якого розташований між центральними сателітами 6 і 7, а два інших диска 23 і 24 установлені з зовнішньої сторони крайніх сателітів 5 і 8, при цьому диски і сателіти зв'язані між собою цівками 17 забезпечується стійкий плаваючий силовий кінематичний зв'язок між сателітами, що майже неможливо достигнути в аналогічних планетарних редукторах з сателітами, установленими в паралельних площинах. Це спрощує конструкцію, забезпечує рівномірність розподілу навантаження між сателітами, підвищує навантагову спроможність і плавність роботи редуктора, розширює діапазон передаткових чисел. 3 41505 Фіг. __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 4
ДивитисяДодаткова інформація
Назва патенту англійськоюPlanetary reducer
Автори англійськоюPankov Viktor Andriiovych, Sevostianov Serhii Viktorovych, Strelnikov Viktor Mykytovych
Назва патенту російськоюПланетарный редуктор
Автори російськоюПанков Виктор Андреевич, Севостьянов Сергей Викторович, Стрельников Виктор Никитович
МПК / Мітки
МПК: F16H 1/34, F16H 1/32, F16H 25/00, F16H 1/28
Мітки: планетарний, редуктор
Код посилання
<a href="https://ua.patents.su/4-41505-planetarnijj-reduktor.html" target="_blank" rel="follow" title="База патентів України">Планетарний редуктор</a>
Реверсивний планетарний редуктор
Номер патенту: 39328
Опубліковано: 15.06.2001
Автор: Баев Микола Васильович
МПК: F16H 15/00
Мітки: реверсивний, редуктор, планетарний
Формула / Реферат:
Реверсний планетарний редуктор, що містить корпус, водило, яке через підшипники має опору на корпус та його кришку, співвісно якому розміщено зубчате колесо, яке має свободу обертання навколо своєї осі і шипи на боковій поверхні, зубчате колесо, закріплене відносно корпусу нерухомо, до яких мають зачеплення сателіти, по парі розташованих на кожній осі з водилом, який відрізняється тим, що між кожною парою сателітів симетрично їх осі розміщені...
Планетарний колісний редуктор
Номер патенту: 12192
Опубліковано: 25.12.1996
Автори: Розенцвайг Борис Айзикович, Кравченко Микола Олександрович, Чернявський Ілля Шмулевич
МПК: F16H 1/28
Мітки: планетарний, колісний, редуктор
Формула / Реферат:
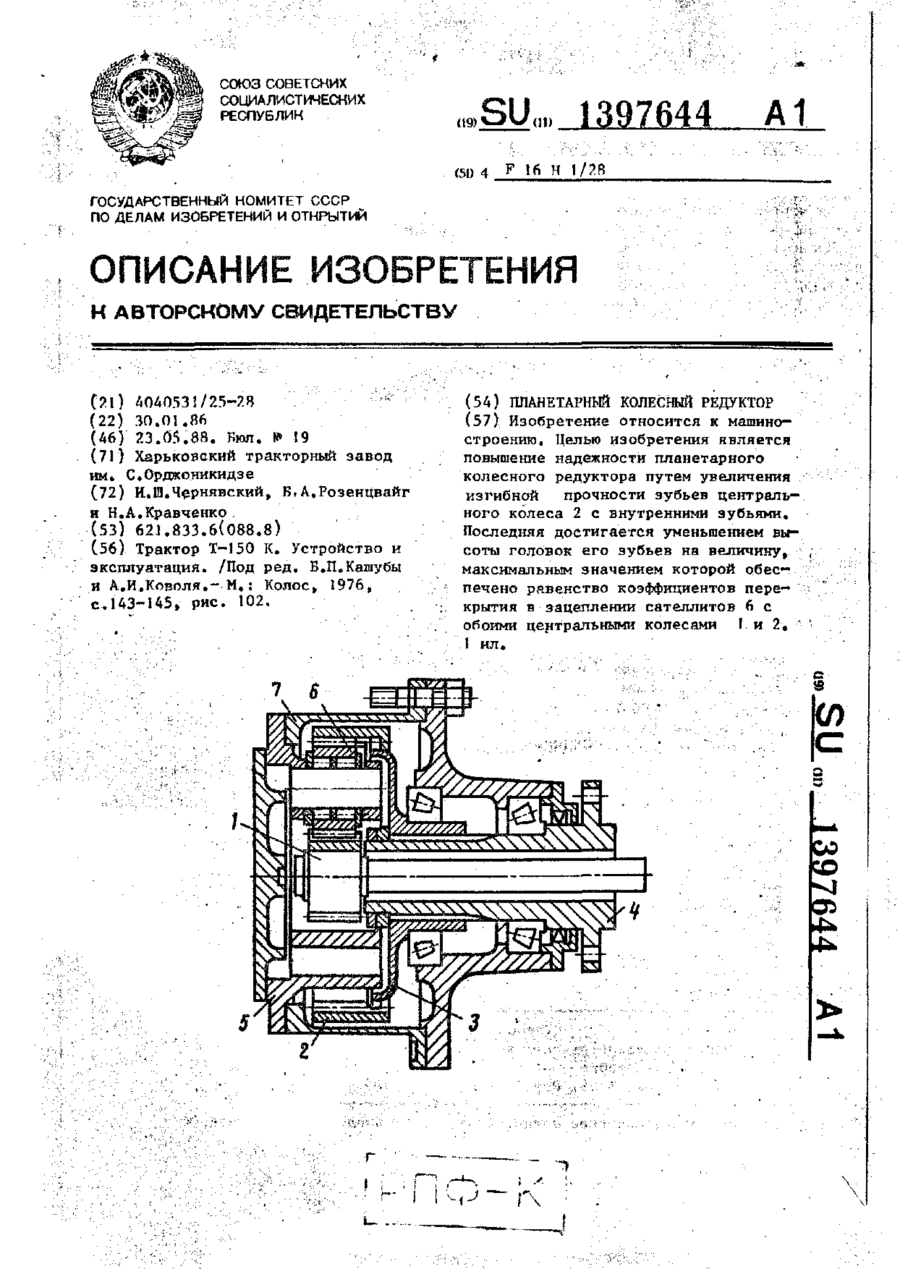
Планетарный колесный редуктор, содержащий входной вал, вращающийся относительно него корпус, водило с сателлитами, жестко связанное с вращающимся корпусом центральное колесо с наружными зубьями, установленное на входном валу, неподвижное центральное колесо с внутренними зубьями, а угол зацепления во внешнем зацеплении выполнен больше угла зацепления во внутреннем зацеплении, отличающийся тем, что, с целью повышения надежности, высота...
Планетарний редуктор
Номер патенту: 17281
Опубліковано: 01.04.1997
Автор: Власов Іван Петрович
МПК: F16H 1/48
Мітки: редуктор, планетарний
Формула / Реферат:
Планетарный редуктор, содержащий составной корпус и установленный в нем на подшипниках выходной вале центральными зубчатыми колесами с большим и меньшим количеством внутренних зубьев соответственно, зацепляющийся с центральными колесами с равной разностью чисел зубьев и установленный на подшипниках на эксцентричной части входного эксцентрикового вал-водила сателлит с двумя зубчатыми венцами и установленный на вал-водиле балансир,...
Планетарний циклоїдальний редуктор
Номер патенту: 35642
Опубліковано: 16.04.2001
Автор: Крахмальова Тетяна Ігорівна
МПК: F16H 1/32
Мітки: циклоїдальний, редуктор, планетарний
Формула / Реферат:
Планетарний циклоїдальний редуктор, який містить корпус, швидкохідний вал, нерухомо встановлене у корпусі центральне колесо, встановлений ексцентрично на швидкохідному валу сателіт, зв'язаний з тихохідним валом через пристрій знімання обертів, що містить гнучкий пружний елемент , який відрізняється тим, що до складу пристрою знімання обертів введено циліндричний стакан, нерухомо прикріплений до сателіта так, що осі сателіта і стакана...
Інерційний планетарний трансформатор моменту
Номер патенту: 35094
Опубліковано: 15.03.2001
Автор: Данилишин Григорій Михайлович
МПК: F16H 31/00, B60K 17/06, F16H 33/00
Мітки: планетарний, трансформатор, інерційний, моменту
Формула / Реферат:
1. Інерційний планетарний трансформатор моменту з ведучим водилом, веденим центральним колесом, по меншій мірі двома сателітами з підпружиненими з можливістю переміщення в одній з діаметральних площин сателіту і по одну сторону від осі відповідного сателіту дебалансами, який відрізняється тим, що дебаланси підпружинені на водилі.2. Трансформатор моменту по п. 1, який відрізняється тим, що принаймні одна з пружин орієнтації дебалансу...
Попередній патент: Пристрій для доставки відміряних доз лікарського засобу
Випадковий патент: Привід пристрою регулювання напруги силового трансформатора під навантаженням