Реверсивний планетарний редуктор
Формула / Реферат
Реверсний планетарний редуктор, що містить корпус, водило, яке через підшипники має опору на корпус та його кришку, співвісно якому розміщено зубчате колесо, яке має свободу обертання навколо своєї осі і шипи на боковій поверхні, зубчате колесо, закріплене відносно корпусу нерухомо, до яких мають зачеплення сателіти, по парі розташованих на кожній осі з водилом, який відрізняється тим, що між кожною парою сателітів симетрично їх осі розміщені по парі криволінійних важелів, одним кінцем шарнірно з’єднаних з сателітом, який має зачеплення із зубчатим колесом, закріпленим відносно корпусу нерухомо, другим кінцем, на діаметрально протилежному боці, шарнірно з’єднані з коромислами, які мають зачеплення одним кінцем з кулачками на боковій стороні сателіта, зачепленого із зубчатим колесом із свободою обертання навколо своєї осі, другим кінцем коромисла шарнірно з’єднані у вушках других криволінійних важелів пари виконаних над їх шарнірним з’єднанням з сателітом, котрий зачеплений з зубчатим колесом.
Текст
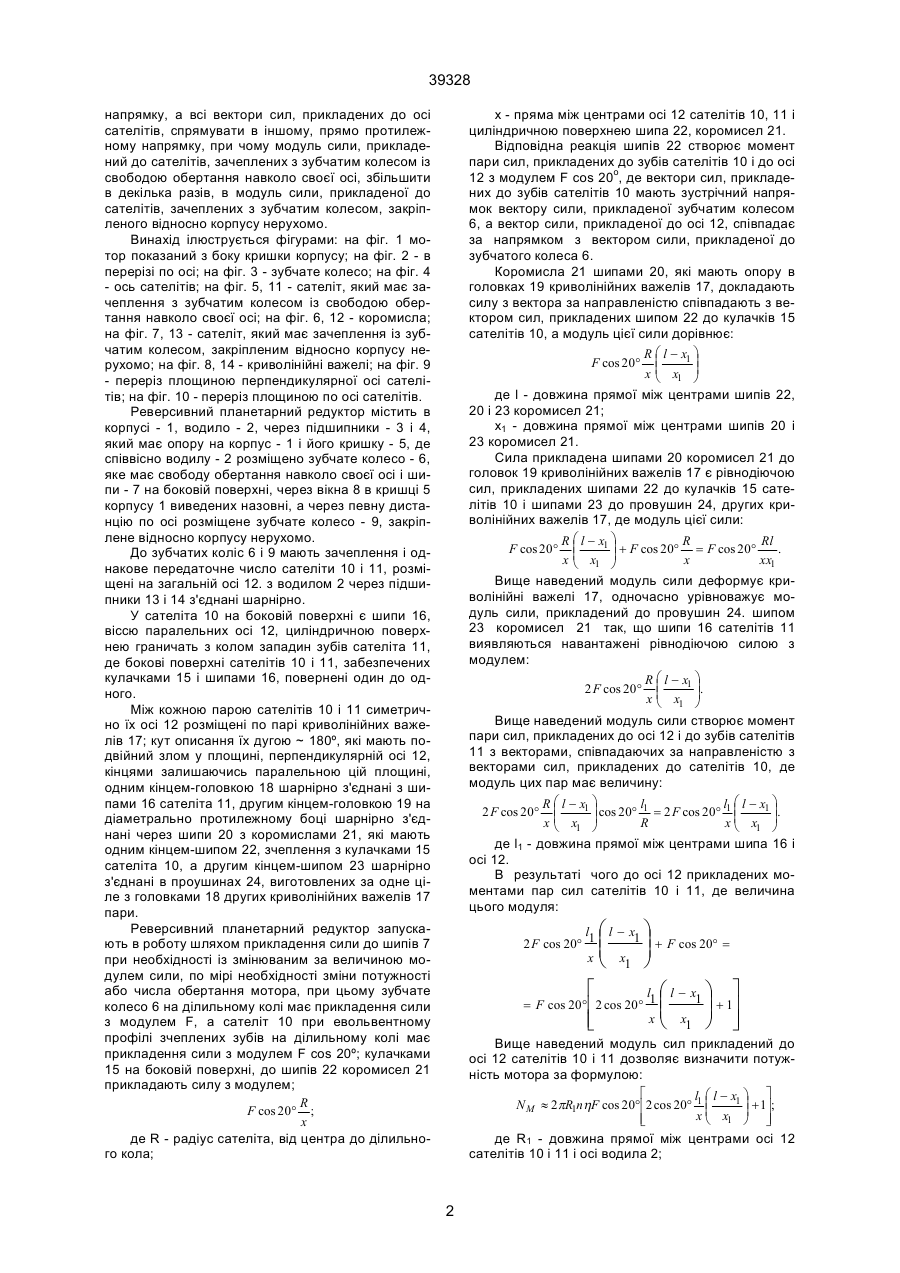
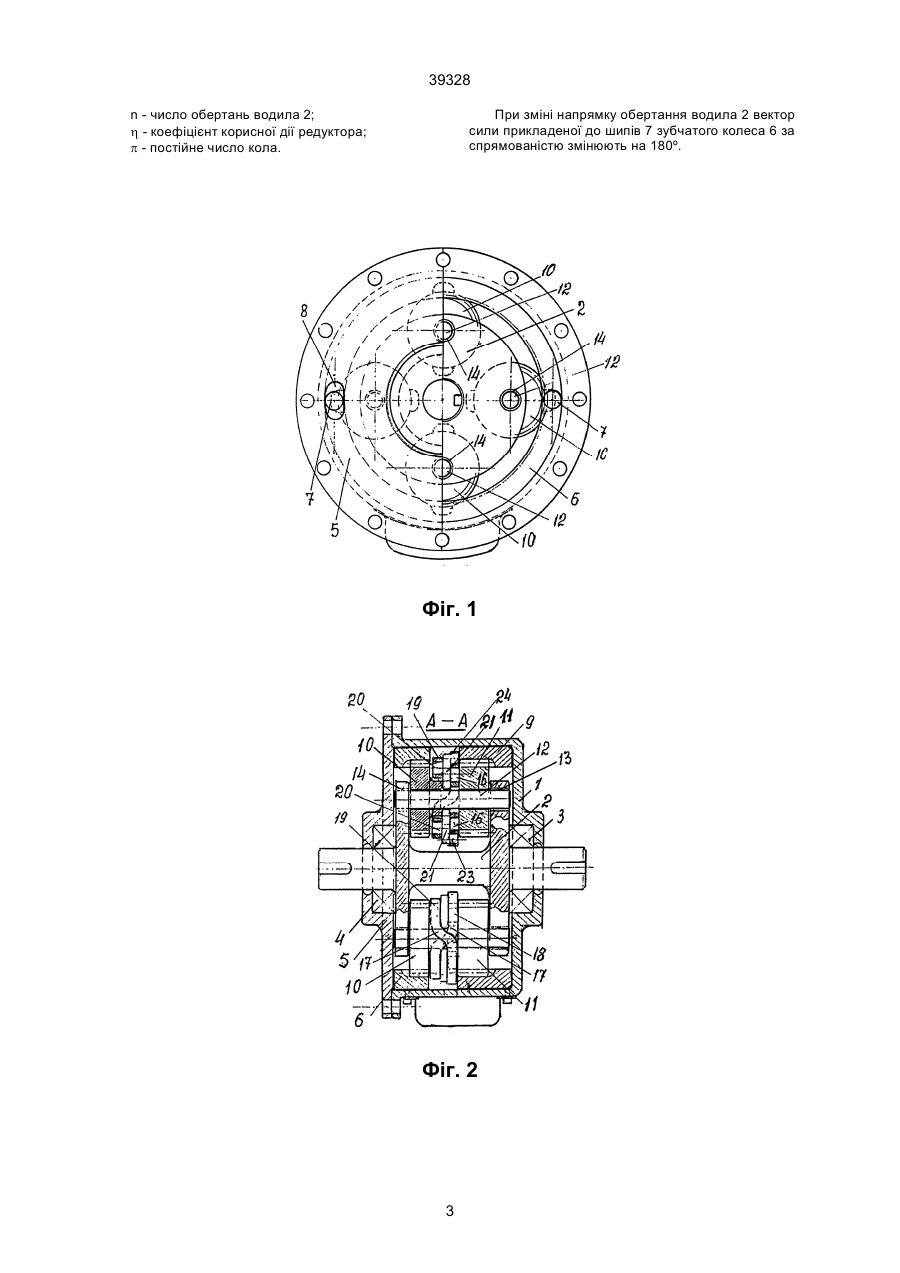
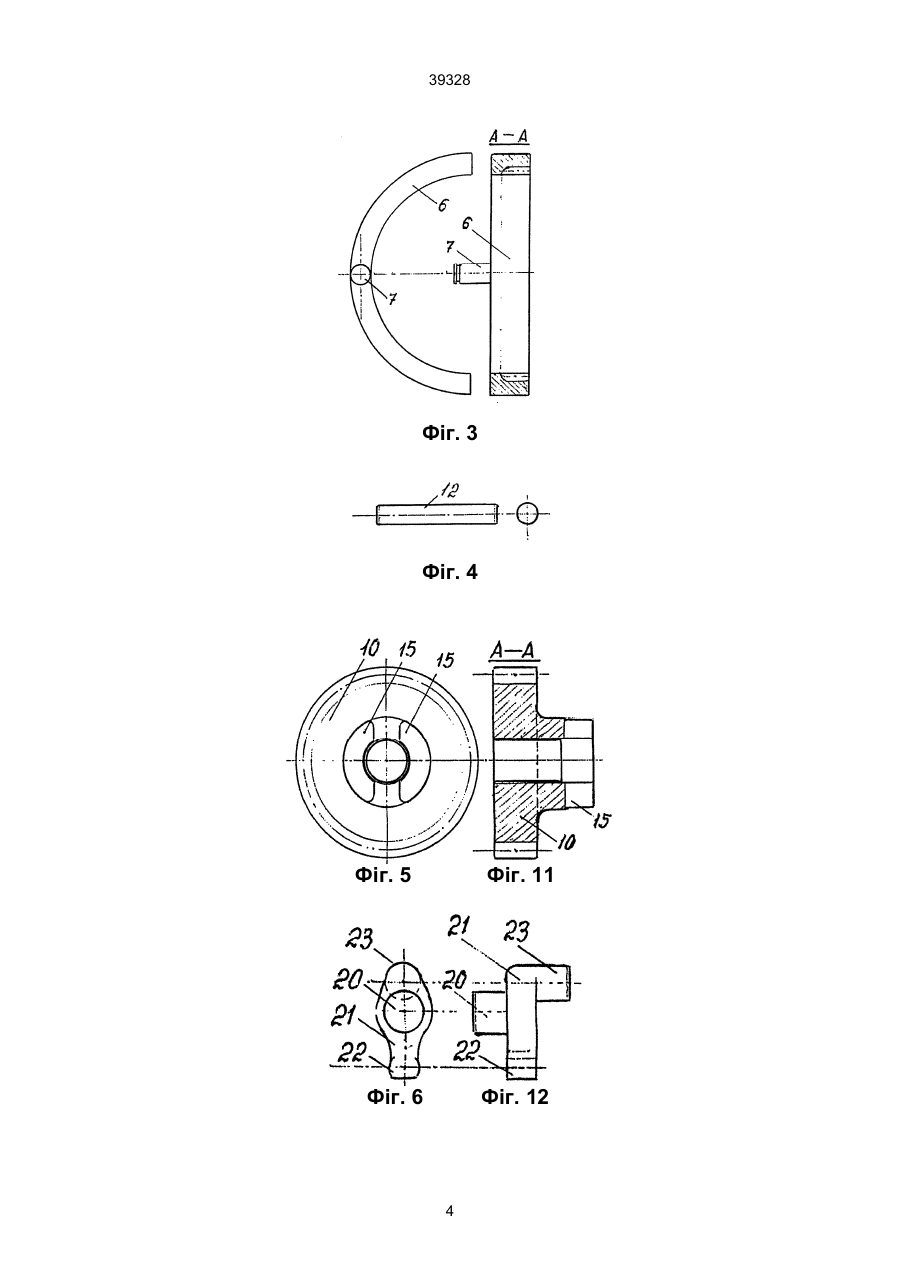
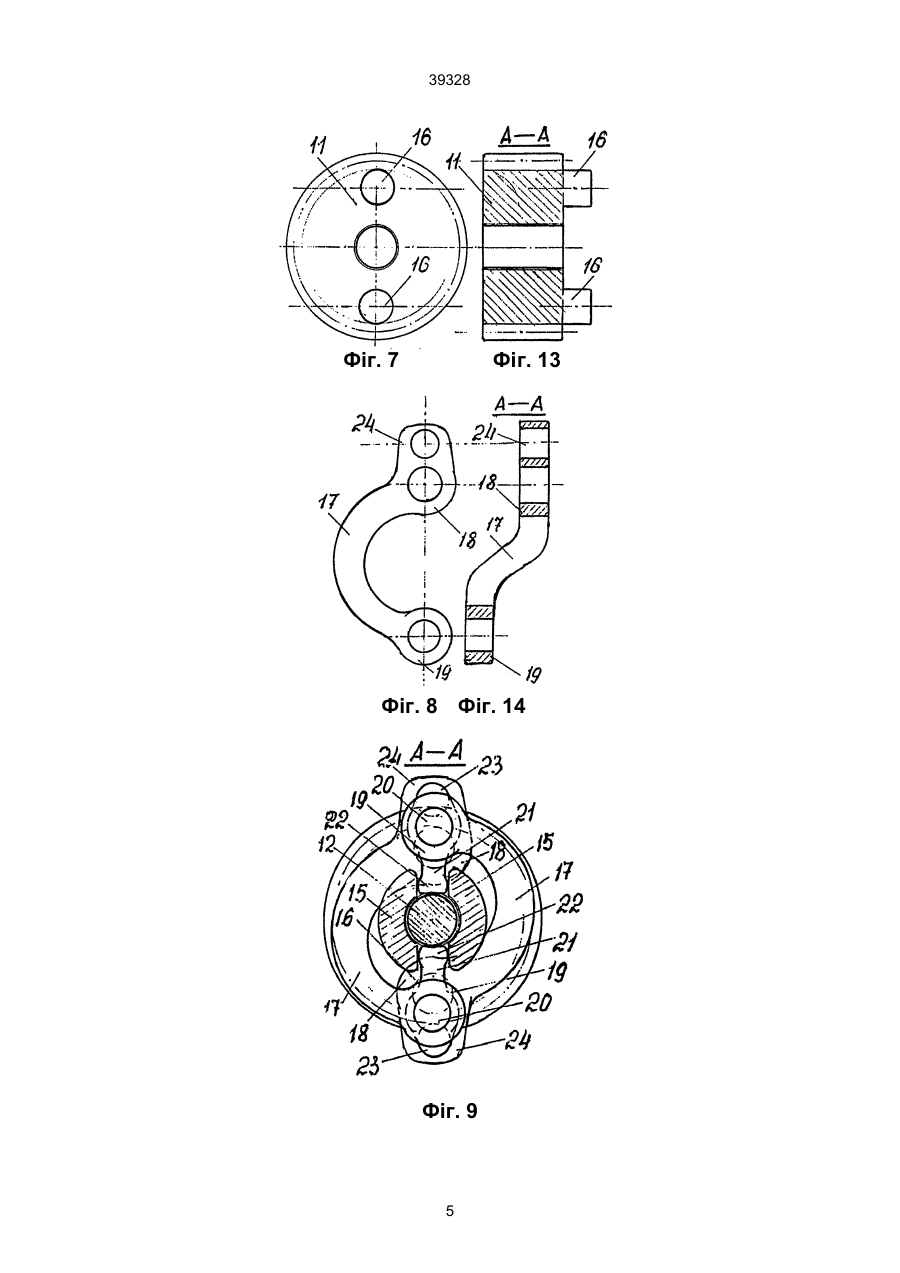
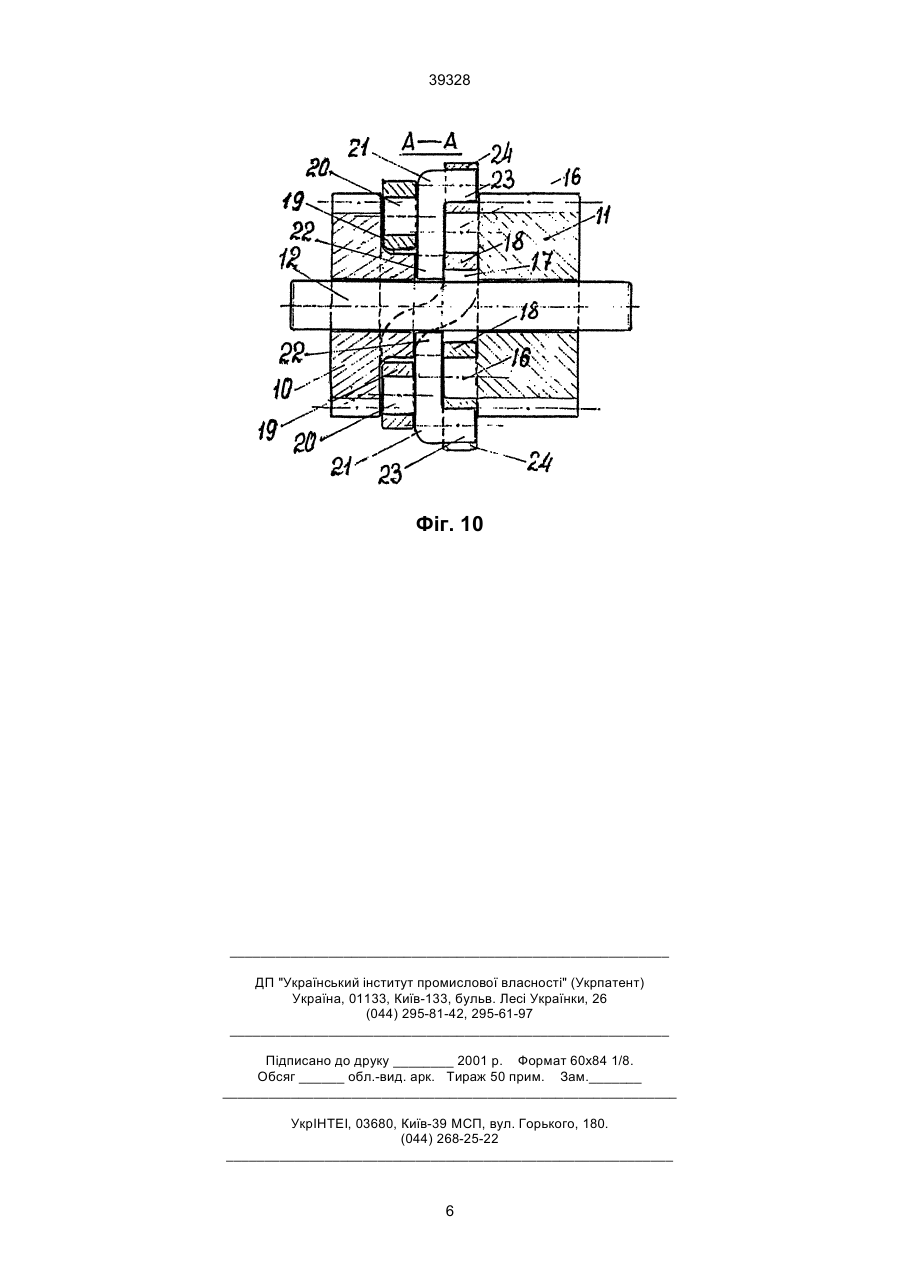
Реверсивний планетарний редуктор, що містить корпус, водило, яке через підшипники має опору на корпус та його кришку, співвісно якому розміщено зубчате колесо, яке має свободу обертання навколо своєї осі і шипи на боковій поверхні, зубчате колесо, закріплене відносно корпусу нерухомо, до яких мають зачеплення сателіти, по парі розташованих на кожній осі з водилом, який 39328 x - пряма між центрами осі 12 сателітів 10, 11 і циліндричною поверхнею шипа 22, коромисел 21. Відповідна реакція шипів 22 створює момент пари сил, прикладених до зубів сателітів 10 і до осі 12 з модулем F cos 20о, де вектори сил, прикладених до зубів сателітів 10 мають зустрічний напрямок вектору сили, прикладеної зубчатим колесом 6, а вектор сили, прикладеної до осі 12, співпадає за напрямком з вектором сили, прикладеної до зубчатого колеса 6. Коромисла 21 шипами 20, які мають опору в головках 19 криволінійних важелів 17, докладають силу з вектора за направленістю співпадають з вектором сил, прикладених шипом 22 до кулачків 15 сателітів 10, а модуль цієї сили дорівнює: R æ l - x1 ö ÷ F cos 20° ç x ç x1 ÷ ø è де l - довжина прямої між центрами шипів 22, 20 і 23 коромисел 21; x1 - довжина прямої між центрами шипів 20 і 23 коромисел 21. Сила прикладена шипами 20 коромисел 21 до головок 19 криволінійних важелів 17 є рівнодіючою сил, прикладених шипами 22 до кулачків 15 сателітів 10 і шипами 23 до провушин 24, других криволінійних важелів 17, де модуль цієї сили: R æ l - x1 ö R Rl ÷ + F cos 20° = F cos 20° F cos 20° ç . x ç x1 ÷ x xx1 ø è напрямку, а всі вектори сил, прикладених до осі сателітів, спрямувати в іншому, прямо протилежному напрямку, при чому модуль сили, прикладений до сателітів, зачеплених з зубчатим колесом із свободою обертання навколо своєї осі, збільшити в декілька разів, в модуль сили, прикладеної до сателітів, зачеплених з зубчатим колесом, закріпленого відносно корпусу нерухомо. Винахід ілюструється фігурами: на фіг. 1 мотор показаний з боку кришки корпусу; на фіг. 2 - в перерізі по осі; на фіг. 3 - зубчате колесо; на фіг. 4 - ось сателітів; на фіг. 5, 11 - сателіт, який має зачеплення з зубчатим колесом із свободою обертання навколо своєї осі; на фіг. 6, 12 - коромисла; на фіг. 7, 13 - сателіт, який має зачеплення із зубчатим колесом, закріпленим відносно корпусу нерухомо; на фіг. 8, 14 - криволінійні важелі; на фіг. 9 - переріз площиною перпендикулярної осі сателітів; на фіг. 10 - переріз площиною по осі сателітів. Реверсивний планетарний редуктор містить в корпусі - 1, водило - 2, через підшипники - 3 і 4, який має опору на корпус - 1 і його кришку - 5, де співвісно водилу - 2 розміщено зубчате колесо - 6, яке має свободу обертання навколо своєї осі і шипи - 7 на боковій поверхні, через вікна 8 в кришці 5 корпусу 1 виведених назовні, а через певну дистанцію по осі розміщене зубчате колесо - 9, закріплене відносно корпусу нерухомо. До зубчатих коліс 6 і 9 мають зачеплення і однакове передаточне число сателіти 10 і 11, розміщені на загальній осі 12. з водилом 2 через підшипники 13 і 14 з'єднані шарнірно. У сателіта 10 на боковій поверхні є шипи 16, віссю паралельних осі 12, циліндричною поверхнею граничать з колом западин зубів сателіта 11, де бокові поверхні сателітів 10 і 11, забезпечених кулачками 15 і шипами 16, повернені один до одного. Між кожною парою сателітів 10 і 11 симетрично їх осі 12 розміщені по парі криволінійних важелів 17; кут описання їх дугою ~ 180º, які мають подвійний злом у площині, перпендикулярній осі 12, кінцями залишаючись паралельною цій площині, одним кінцем-головкою 18 шарнірно з'єднані з шипами 16 сателіта 11, другим кінцем-головкою 19 на діаметрально протилежному боці шарнірно з'єднані через шипи 20 з коромислами 21, які мають одним кінцем-шипом 22, зчеплення з кулачками 15 сателіта 10, а другим кінцем-шипом 23 шарнірно з'єднані в проушинах 24, виготовлених за одне ціле з головками 18 других криволінійних важелів 17 пари. Реверсивний планетарний редуктор запускають в роботу шляхом прикладення сили до шипів 7 при необхідності із змінюваним за величиною модулем сили, по мірі необхідності зміни потужності або числа обертання мотора, при цьому зубчате колесо 6 на ділильному колі має прикладення сили з модулем F, а сателіт 10 при евольвентному профілі зчеплених зубів на ділильному колі має прикладення сили з модулем F cos 20º; кулачками 15 на боковій поверхні, до шипів 22 коромисел 21 прикладають силу з модулем; R F cos 20° ; x де R - радіус сателіта, від центра до ділильного кола; Вище наведений модуль сили деформує криволінійні важелі 17, одночасно урівноважує модуль сили, прикладений до провушин 24. шипом 23 коромисел 21 так, що шипи 16 сателітів 11 виявляються навантажені рівнодіючою силою з модулем: R æ l - x1 ö ÷. 2 F cos 20° ç x ç x1 ÷ ø è Вище наведений модуль сили створює момент пари сил, прикладених до осі 12 і до зубів сателітів 11 з векторами, співпадаючих за направленістю з векторами сил, прикладених до сателітів 10, де модуль цих пар має величину: R æ l - x1 ö l l æ l - x1 ö ÷ cos 20° 1 = 2 F cos 20° 1 ç ÷. 2 F cos 20° ç x ç x1 ÷ R x ç x1 ÷ ø ø è è де l1 - довжина прямої між центрами шипа 16 і осі 12. В результаті чого до осі 12 прикладених моментами пар сил сателітів 10 і 11, де величина цього модуля: l æ l - x1 ö ÷ + F cos 20° = 2 F cos 20° 1 ç x ç x1 ÷ è ø é l æ l - x1 ö ù ÷ + 1ú = F cos 20°ê 2 cos 20° 1 ç x ç x1 ÷ ú ê è ø û ë Вище наведений модуль сил прикладений до осі 12 сателітів 10 і 11 дозволяє визначити потужність мотора за формулою: é l æ l - x1 ö ù ÷ + 1ú; N M » 2pR1nhF cos 20°ê2 cos 20° 1 ç x ç x1 ÷ ú ê ø û è ë де R1 - довжина прямої між центрами осі 12 сателітів 10 і 11 і осі водила 2; 2 39328 При зміні напрямку обертання водила 2 вектор сили прикладеної до шипів 7 зубчатого колеса 6 за спрямованістю змінюють на 180º. n - число обертань водила 2; h - коефіцієнт корисної дії редуктора; p - постійне число кола. Фіг. 1 Фіг. 2 3 39328 Фіг. 3 Фіг. 4 Фіг. 5 Фіг. 11 Фіг. 6 Фіг. 12 4 39328 Фіг. 7 Фіг. 13 Фіг. 8 Фіг. 14 Фіг. 9 5 39328 Фіг. 10 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 6
ДивитисяДодаткова інформація
Назва патенту англійськоюReverse planetary gearbox
Автори англійськоюBaiev Mykola Vasyliovych
Назва патенту російськоюРеверсивный планетарный редуктор
Автори російськоюБаев Николай Васильевич
МПК / Мітки
МПК: F16H 15/00
Мітки: реверсивний, планетарний, редуктор
Код посилання
<a href="https://ua.patents.su/6-39328-reversivnijj-planetarnijj-reduktor.html" target="_blank" rel="follow" title="База патентів України">Реверсивний планетарний редуктор</a>
Планетарний редуктор
Номер патенту: 17281
Опубліковано: 01.04.1997
Автор: Власов Іван Петрович
МПК: F16H 1/48
Мітки: редуктор, планетарний
Формула / Реферат:
Планетарный редуктор, содержащий составной корпус и установленный в нем на подшипниках выходной вале центральными зубчатыми колесами с большим и меньшим количеством внутренних зубьев соответственно, зацепляющийся с центральными колесами с равной разностью чисел зубьев и установленный на подшипниках на эксцентричной части входного эксцентрикового вал-водила сателлит с двумя зубчатыми венцами и установленный на вал-водиле балансир,...
Планетарний циклоїдальний редуктор
Номер патенту: 35642
Опубліковано: 16.04.2001
Автор: Крахмальова Тетяна Ігорівна
МПК: F16H 1/32
Мітки: редуктор, планетарний, циклоїдальний
Формула / Реферат:
Планетарний циклоїдальний редуктор, який містить корпус, швидкохідний вал, нерухомо встановлене у корпусі центральне колесо, встановлений ексцентрично на швидкохідному валу сателіт, зв'язаний з тихохідним валом через пристрій знімання обертів, що містить гнучкий пружний елемент , який відрізняється тим, що до складу пристрою знімання обертів введено циліндричний стакан, нерухомо прикріплений до сателіта так, що осі сателіта і стакана...
Реверсивний редуктор
Номер патенту: 18183
Опубліковано: 01.07.1997
Автори: Тардов Герман Арсентьович, Романов Віктор Іванович, Бєляєв Федір Федорович
МПК: F16H 3/02, B63H 23/00
Мітки: реверсивний, редуктор
Формула / Реферат:
Реверсивный редуктор, имеющий два зубчатых перебора, первая ступень которых содержит ведущую шестерню, сопряженную одновременно с двумя симметрично расположенными ведомыми зубчатыми колесами данной ступени, которые, в свою очередь, соединены с соответствующими шестернями второй ступени, сопряженными с главным зубчатым колесом редуктора, отличающийся тем, что ведущая шестерня первой ступени соединена с насосным колесом гидромуфты переднего...
Реверсивний редуктор
Номер патенту: 14990
Опубліковано: 04.03.1997
Автори: Тардов Герман Арсентьович, Бєляєв Федір Федорович, Романов Віктор Іванович
МПК: B63H 23/00, F16H 3/02
Мітки: редуктор, реверсивний
Формула / Реферат:
1. Реверсивный редуктор газотурбинной установки, содержащий для каждого газотурбинного двигателя зубчатый перебор, который имеет ведущую шестерню первой ступени, сопряженную с двумя последовательно расположенными ведомыми зубчатыми колесами переднего хода и заднего хода данной ступени, а последние с помощью разобщительных муфт соединены с соответствующими ведущими шестернями второй ступени редуктора, сопряженными с его главным зубчатым...
Планетарний колісний редуктор
Номер патенту: 12192
Опубліковано: 25.12.1996
Автори: Чернявський Ілля Шмулевич, Кравченко Микола Олександрович, Розенцвайг Борис Айзикович
МПК: F16H 1/28
Мітки: редуктор, колісний, планетарний
Формула / Реферат:
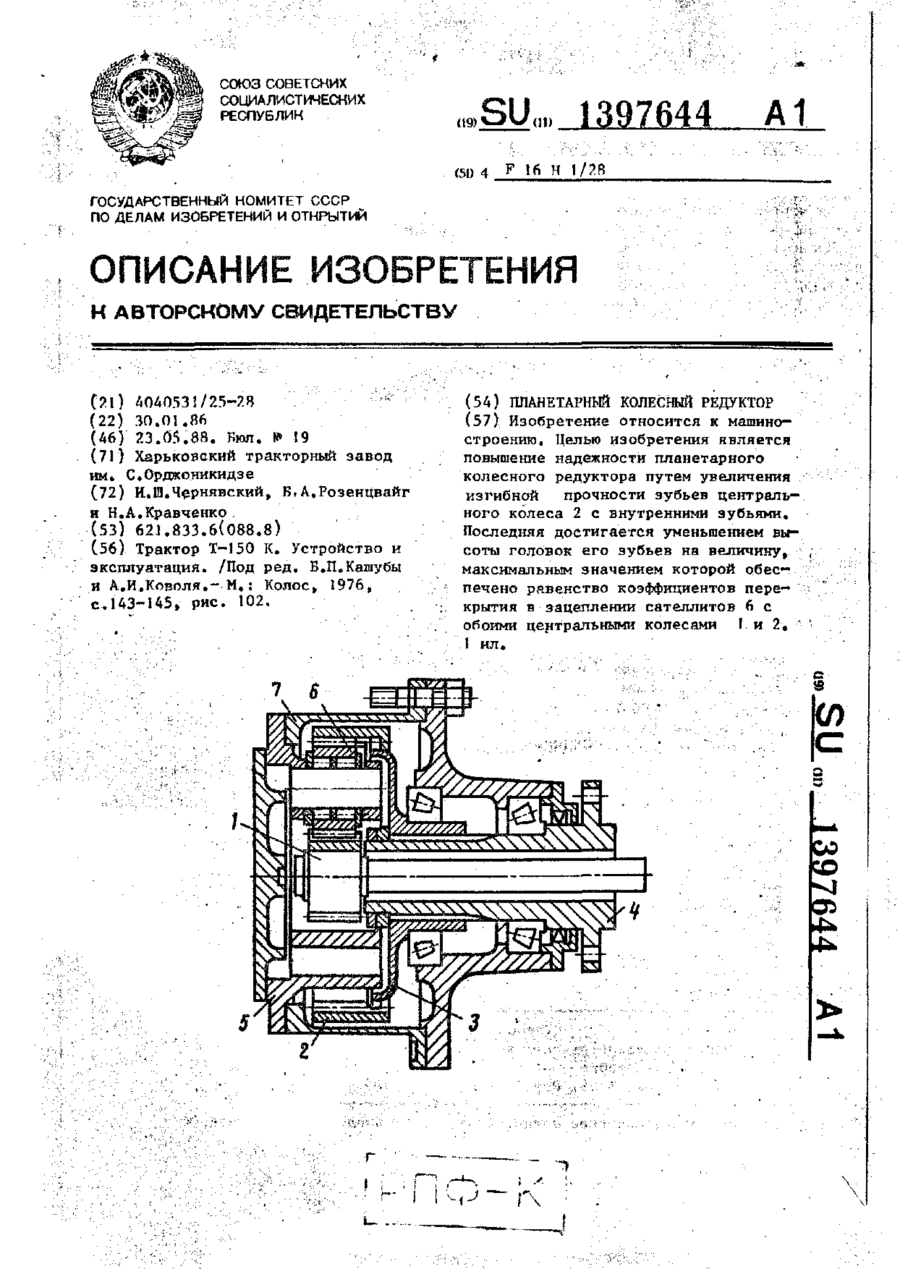
Планетарный колесный редуктор, содержащий входной вал, вращающийся относительно него корпус, водило с сателлитами, жестко связанное с вращающимся корпусом центральное колесо с наружными зубьями, установленное на входном валу, неподвижное центральное колесо с внутренними зубьями, а угол зацепления во внешнем зацеплении выполнен больше угла зацепления во внутреннем зацеплении, отличающийся тем, что, с целью повышения надежности, высота...
Попередній патент: Дисковий торцевий робочий орган землерийної машини
Наступний патент: Вибухова суміш
Випадковий патент: Настоянка гірка "старка монастирська"