Система приводів
Номер патенту: 4452
Опубліковано: 17.01.2005
Автори: Чередниченко Арнольд Володимирович, Козін Микола Степанович, Боголіб Ірина Григоріївна
Формула / Реферат
1. Система приводів, що містить станину з установленими на ній приводами, яка відрізняється тим, що на станині шарнірно закріплений корпус ведучого приводу і встановлені кронштейни з колісними парами з можливістю їх обертання навколо горизонтальної осі та утримання ними напрямних, зв'язаних відповідно з корпусами чергового і наступного приводів, що шарнірно з'єднані зі штоками ведучого і наступних приводів і орієнтовані співвісно з корпусом ведучого приводу.
2. Система приводів за п. 1, яка відрізняється тим, що колеса колісних пар оснащені гребенями.
3. Система приводів за п. 1, яка відрізняється тим, що енергетичні комунікації до корпусів чергового і наступного приводів виконані гнучкими.
4. Система приводів за п. 1, яка відрізняється тим, що станина і шток останнього приводу оснащені шарнірами.
Текст
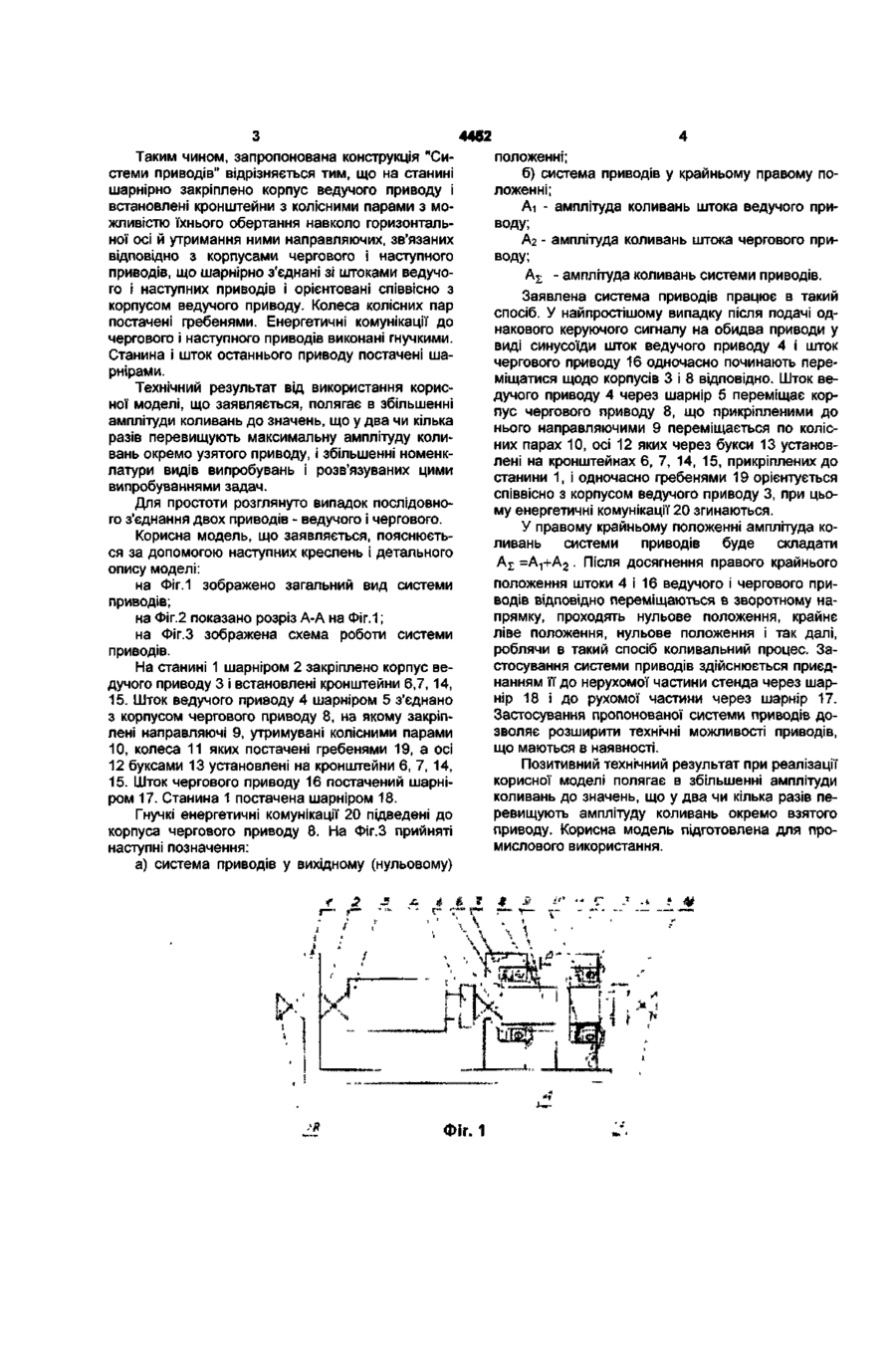
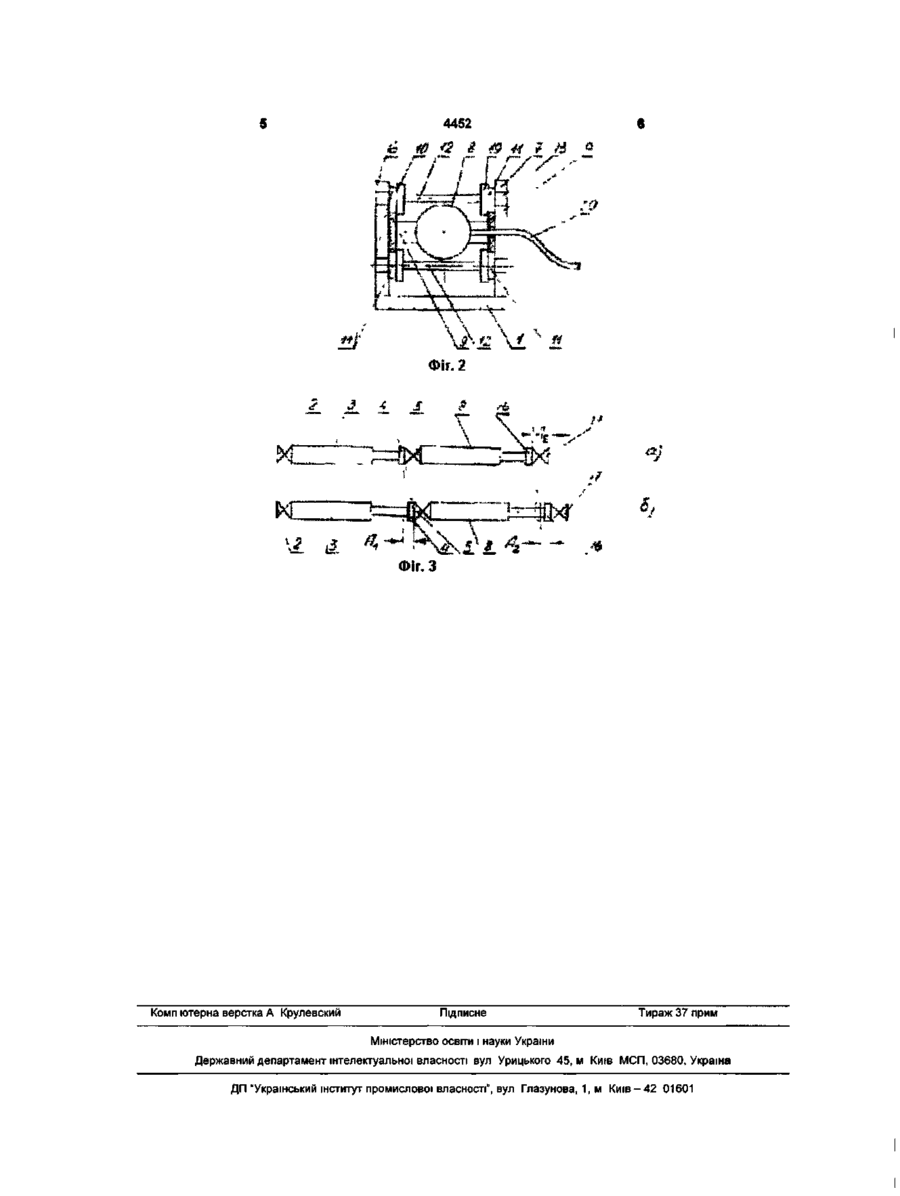
1. Система приводів, що містить станину з установленими на ній приводами, яка відрізняється тим, що на станині шарнірно закріплений корпус ведучого приводу і встановлені кронштейни з колісними парами з можливістю їх обертання навколо горизонтальної осі та утримання ними напрямних, зв'язаних відповідно з корпусами чергового і наступного приводів, що шарнірно з'єднані зі штоками ведучого і наступних приводів і орієнтовані співвісно з корпусом ведучого приводу. 2. Система приводів за п. 1, яка відрізняється тим, що колеса колісних пар оснащені гребенями. 3. Система приводів за п. 1, яка відрізняється тим, що енергетичні комунікації до корпусів чергового і наступного приводів виконані гнучкими. 4. Система приводів за п. 1, яка відрізняється тим, що станина і шток останнього приводу оснащені шарнірами. Корисна модель відноситься до області випробувальної техніки, а саме - до приводів, що мають широкий діапазон амплітуд коливань. Вона може бути використана у випробувальних стендах для створення односпрямованого прискореного руху і вібрацій з великими амплітудами при вібровипробуваннях вузлів і виробів ракетно-космічної техніки, атомної енергетики, рухомого залізничного складу й інших галузей машинобудування. Відомий гідровібратор (див.Серенсен С.В. і ін. "Динаміка машин для випробувань на втому", М., "Машинобудування", 1967р., стор.347, мал. 13.4), що містить корпус із закріпленим на ньому циліндром з рухливим плунжером і постачений системами гідропостачання і керування. Максимальна амплітуда коливань плунжера складає 25мм і визначається його конструктивними і технічними особливостями. Максимальне зусилля, що розвивається, складає 500 кН. Відомий сервогидравлічний випробувальний привід фірми "Dynatehnik" (див. переклад з німецького Царфіна Л.Е. №2803 від 26.06.85р."Випробувальні приводи", Торговопромислова палата УРСР, Дніпропетровське відділення, Дніпропетровськ, Конструкторське бюро "Південне", стор.3,5), що містить корпус-циліндр із встановленим у ньому рухливим поршнем зі штоком і постачений системами гідропостачання і керування. Корпус і шток постачені шарнірами приєднання. Максимальна амплітуда коливань поршня зі штоком складає 135 мм і визначається його конструктивними і технічними особливостями. Максимальне зусилля, що розвивається, складає 250 кН. Найбільш близький аналог (прототип) невідомий. В основу корисної моделі "Система приводів" поставлена задача збільшення амплітуди коливань шляхом додавання амплітуд послідовно співвісно з'єднаних двох чи декількох приводів. Поставлена задача вирішується тим, що в "Системі приводів", що містить станину з установленими на ній приводами, на станині шарнірне закріплено корпус ведучого приводу і встановлені кронштейни з колісними парами з можливістю їхнього обертання навколо горизонтальної осі й утримання ними направляючих, зв'язаних відповідно з корпусами чергового і наступного приводів, що шарнірно з'єднані зі штоками ведучого і наступних приводів і орієнтовані співвісно з корпусом ведучого приводу. Колеса колісних пар постачені гребенями. Енергетичні комунікації до корпусів чергового і наступного приводів виконані гнучкими. Станина і шток останнього приводу постачені шарнірами. При цьому збільшення амплітуди досягається за рахунок додавання амплітуд коливань штоків приводів, а співвісне їхнє розташування забезпечується направляючими, утримуваними колісними парами в заданому положенні. CM ю 4462 Таким чином, запропонована конструкція "Системи приводів" відрізняється тим, що на станині шарнірно закріплено корпус ведучого приводу і встановлені кронштейни з колісними парами з можливістю їхнього обертання навколо горизонтальної осі й утримання ними направляючих, зв'язаних відповідно з корпусами чергового і наступного приводів, що шарнірно з'єднані зі штоками ведучого і наступних приводів і орієнтовані співвісно з корпусом ведучого приводу. Колеса колісних пар постачені гребенями. Енергетичні комунікації до чергового і наступного приводів виконані гнучкими. Станина і шток останнього приводу постачені шарнірами. Технічний результат від використання корисної моделі, що заявляється, полягає в збільшенні амплітуди коливань до значень, що у два чи кілька разів перевищують максимальну амплітуду коливань окремо узятого приводу, і збільшенні номенклатури видів випробувань і розв'язуваних цими випробуваннями задач. Для простоти розглянуто випадок послідовного з'єднання двох приводів - ведучого і чергового. Корисна модель, що заявляється, пояснюється за допомогою наступних креслень і детального опису моделі: на Фіг.1 зображено загальний вид системи приводів; на Фіг.2 показано розріз А-А на Фіг. 1; на Фіг.З зображена схема роботи системи приводів. На станині 1 шарніром 2 закріплено корпус ведучого приводу 3 і встановлені кронштейни 6,7, 14, 15. Шток ведучого приводу 4 шарніром 5 з'єднано з корпусом чергового приводу 8, на якому закріплені направляючі 9, утримувані колісними парами 10, колеса 11 яких постачені гребенями 19, а осі 12 буксами 13 установлені на кронштейни 6, 7, 14, 15. Шток чергового приводу 16 постачений шарніром 17. Станина 1 постачена шарніром 18. Гнучкі енергетичні комунікації 20 підведені до корпуса чергового приводу 8. На Фіг.З прийняті наступні позначення: а) система приводів у вихідному (нульовому) Фіг. 1 положенні; б) система приводів у крайньому правому положенні; Аі - амплітуда коливань штока ведучого приводу; Аг - амплітуда коливань штока чергового приводу; A z - амплітуда коливань системи приводів. Заявлена система приводів працює в такий спосіб. У найпростішому випадку після подачі однакового керуючого сигналу на обидва приводи у виді синусоїди шток ведучого приводу 4 і шток чергового приводу 16 одночасно починають переміщатися щодо корпусів 3 і 8 відповідно. Шток ведучого приводу 4 через шарнір 5 переміщає корпус чергового приводу 8, що прикріпленими до нього направляючими 9 переміщається по колісних парах 10, осі 12 яких через букси 13 установлені на кронштейнах 6, 7, 14, 15, прикріплених до станини 1, і одночасно гребенями 19 орієнтується співвісно з корпусом ведучого приводу 3, при цьому енергетичні комунікації 20 згинаються. У правому крайньому положенні амплітуда коливань системи приводів буде складати A z =A 1 +A 2 . Після досягнення правого крайнього положення штоки 4 і 16 ведучого і чергового приводів відповідно переміщаються в зворотному напрямку, проходять нульове положення, крайнє ліве положення, нульове положення і так далі, роблячи в такий спосіб коливальний процес. Застосування системи приводів здійснюється приєднанням її до нерухомої частини стенда через шарнір 18 і до рухомої частини через шарнір 17. Застосування пропонованої системи приводів дозволяє розширити технічні можливості приводів, що маються в наявності. Позитивний технічний результат при реалізації корисної моделі полягає в збільшенні амплітуди коливань до значень, що у два чи кілька разів перевищують амплітуду коливань окремо взятого приводу. Корисна модель підготовлена для промислового використання. 4452 Фіг. 2 З 4 S $ rb aj Комп ютерна верстка А Крулевский Підписне Тираж 37 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності вул Урицького 45, м Київ МСП, 03680, Україна ДП "Український інститут промислової власності", вул Глазунова, 1, м Київ-42 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDrive system
Автори англійськоюCherednychenko Arnold Volodymyrovych, Boholib Iryna Hryhorivna, Kozin Mykola Stepanovych
Назва патенту російськоюСистема приводов
Автори російськоюЧередниченко Арнольд Владимирович, Боголиб Ирина Григорьевна, Козин Николай Степанович
МПК / Мітки
Код посилання
<a href="https://ua.patents.su/4-4452-sistema-privodiv.html" target="_blank" rel="follow" title="База патентів України">Система приводів</a>
Інерційний запобіжний механізм для високошвидкісних приводів
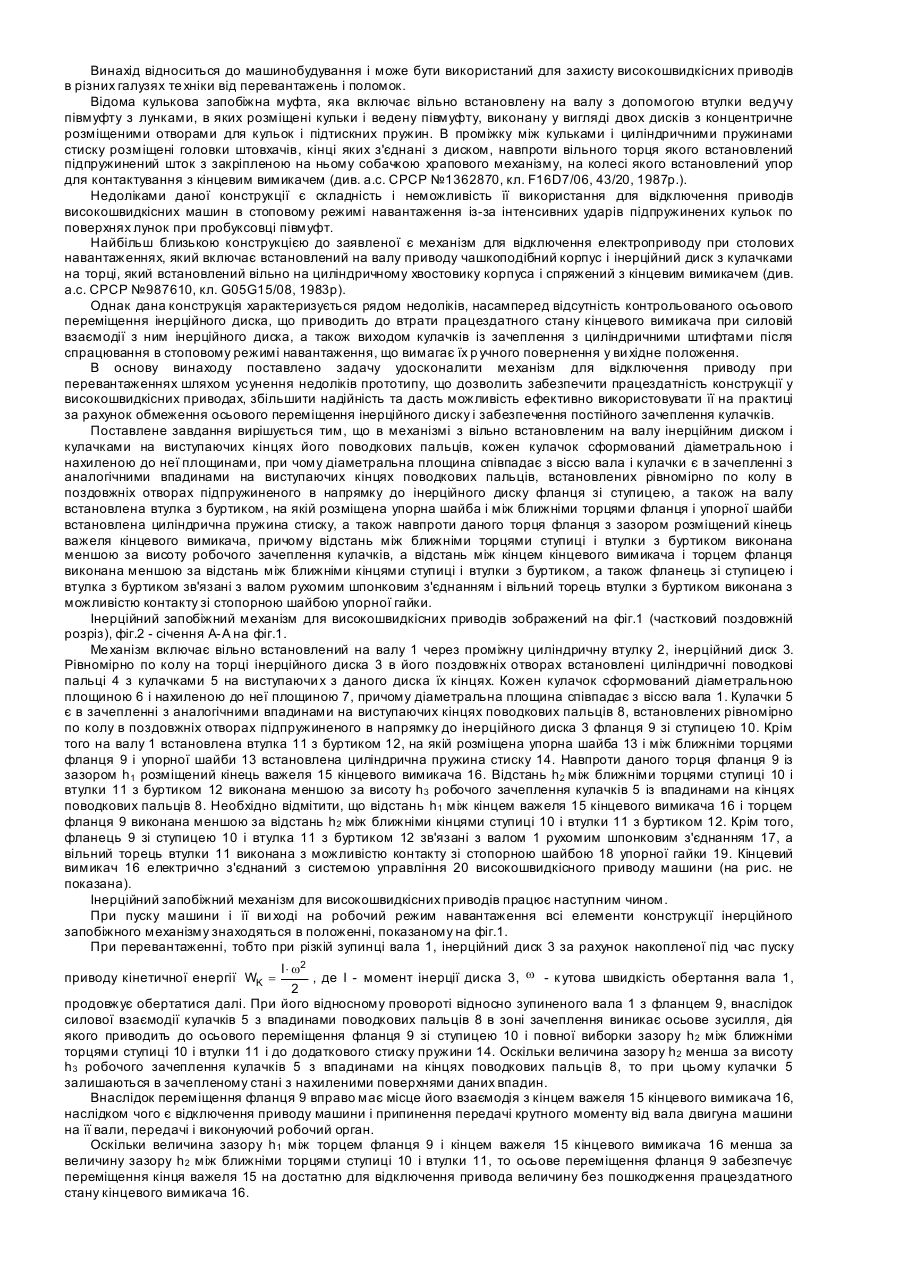
Номер патенту: 63391
Опубліковано: 15.01.2004
Автор: Нагорняк Галина Степанівна
МПК: G05G 15/00
Мітки: приводів, запобіжний, механізм, інерційний, високошвидкісних
Формула / Реферат:
Інерційний запобіжний механізм для високошвидкісних приводів, що містить вільно встановлений на валу інерційний диск з кулачками на виступних кінцях його повідкових пальців, який відрізняється тим, що кожний кулачок сформований діаметральною і нахиленою до неї площинами, причому діаметральна площина співпадає з віссю вала, і кулачки знаходяться в зачепленні з аналогічними заглибинами на виступних кінцях повідкових пальців, встановлених...
Пристрій водопостачання до приводів конвеєра та комбайна
Номер патенту: 1435
Опубліковано: 15.10.2002
Автори: Андрєєв Георгій Володимирович, Лелека Ігор Тимофійович, Сошенко Ігор Микитович, Косарєв Василь Васильович, Косарєв Іван Васильович, Река Ярослав Дмитрович
Мітки: приводів, комбайна, пристрій, водопостачання, конвеєра
Формула / Реферат:
1. Пристрій водопостачання до приводів конвеєра та комбайна, що складається з відцентрового насоса, місткості із зворотною водою, напірних і зливних водоводів, який відрізняється тим, що він виконаний з регульованими редукційними клапанами, встановленими в напірному водоводі біля кінцевих приводів конвеєра, а в зливному водоводі - з колекторами з регулятором витрати води.2. Пристрій за п. 1, який відрізняється тим, що напірний і...
Стенд для випробування приводів свердловинних штангових насосних установок
Номер патенту: 68786
Опубліковано: 16.08.2004
Автори: Харун Віктор Романович, Малько Богдан Дмитрович
МПК: F04B 51/00
Мітки: випробування, стенд, установок, приводів, свердловинних, насосних, штангових
Формула / Реферат:
Стенд для випробовування приводів свердловинних штангових насосних установок, який містить основний навантажувальний пристрій, з'єднаний з підвіскою та гнучкою ланкою, що включає в себе вантаж змінної ваги та додатковий навантажувальний пристрій у вигляді гідравлічного циліндра односторонньої дії, в корпусі якого розміщений поршень, причому порожнини корпуса гідравлічного циліндра і ємність робочої рідини зв'язані між собою через...
Діагностичний стенд гідростатичних приводів сільськогосподарських машин
Номер патенту: 3567
Опубліковано: 15.11.2004
Автори: Козаченко Олексій Васильович, Клімов Павло Миколайович, Сичов Іван Петрович, Куліш Володимир Олександрович, Перчік Анатолій Єлізарович, Басенко Леонід Ілліч
МПК: F16H 61/40
Мітки: приводів, діагностичний, гідростатичних, машин, стенд, сільськогосподарських
Формула / Реферат:
1. Діагностичний стенд гідростатичних приводів сільськогосподарських машин, який включає аксіально-плунжерний насос із двома силовими гідроциліндрами управління коливної плити, кожний з яких окремою гідромагістраллю з'єднаний з відповідним ходом чотириходового трипозиційного гідророзподільника з механічним управлінням, двоходовий двопозиційний гідророзподільник з гідравлічним управлінням, підживлювальний насос із запобіжними та двома...
Навчально-тренувальний стенд приводів керування гусеничної машини
Номер патенту: 544
Опубліковано: 15.09.2000
Автори: Большаков Анатолій Костянтинович, Образцов Володимир Іванович, Шкуро Микола Миколайович, Герасімов Володимир Миколайович
МПК: G09B 9/04
Мітки: приводів, гусеничної, навчально-тренувальний, машини, керування, стенд
Формула / Реферат:
1. Навчально-тренувальний стенд приводів керування гусеничної машини, що містить імітатор носової частини корпусу, штатні органи керування, виконані у вигляді важелів перемикання передач, ручної подачі палива та повороту, педалей зчеплення, гальма та подачі палива і сидіння для того, кого навчають, розташоване перед органами керування в імітаторі носової частини корпусу, який відрізняється тим, що стенд обладнаний імітатором кормової частини...
Попередній патент: Ґрунтообробне знаряддя
Наступний патент: Спосіб визначення апоптозу нейтрофільних гранулоцитів периферичної крові in vitro
Випадковий патент: Спосіб зварювання дугою непрямої дії у високочастотному магнітному полі