Перетворювач координат із гіперболічної системи у декартову
Номер патенту: 44744
Опубліковано: 15.03.2002
Автори: Федоров Дмитро Олексійович, Чернега Віктор Степанович, Осадчий Юрій Михайлович, Марігодов Володимир Костянтинович
Формула / Реферат
Преобразователь координат из гиперболической системы в декартову, содержащий регистры первой и второй исходных координат, коммутаторы, накапливающие сумматоры, узел связи координат, вычитатели, регистры результирующих координат, отличающийся тем, что в него введены n регистров хранения значений приращений результирующих координат, две группы по n трехпозиционных ключей, две группы по n двухпозиционных ключей, первый, второй, третий и четвертый двухпозиционные ключи и блок управления замыканием ключей групп двухпозиционных ключей, при этом первые информационные входы трехпозиционных ключей групп подключены к выходам регистров хранения значений приращений, вторые информационные входы трехпозиционных ключей групп подключены к выходам регистров хранения значений приращений с инвертированными знаками, выходы трехпозиционных ключей групп подключены к информационный входам двухпозиционных ключей групп, выходы двухпозиционных ключей первой группы подключены к информационному входу первого двухпозиционного ключа, выходы двухпозиционных ключей второй группы подключены к информационному входу второго двухпозиционного ключа, выходы первого и второго двухпозиционных ключей подключены соответственно ко входам первого и второго накапливающих сумматоров, выход первого накапливающего сумматора подключен к первому входу узла связи координат и к информационному входу третьего двухпозиционного ключа, выход второго накапливающего сумматора подключен ко второму входу узла связи координат и к информационному входу четвертого двухпозиционного ключа, первый и второй выходы узла связи координат подключены соответственно ко входам вычитаемого вычитателей, выход первого вычитателя подключен к управляющему входу третьего двухпозиционного ключа и к управляющим входам трехпозиционных ключей первой группы, выход второго вычитателя подключен к управляющему входу четвертого двухпозиционного ключа и к управлявщим входам трехпозиционных ключей второй группы, выхода двухпозиционных ключей первой группы подключены к информационному входу первого двухпозиционного ключа, выходы двухпозиционных ключей второй группы подключены к информационному входу второго двухпозиционного ключа, выходы первого и второго двухпозиционных ключей подключены соответственно к первым входам первого и второго накапливающих сумматоров, выход регистра первой исходной координаты подключен ко входу первого коммутатора и ко входу уменьшаемого первого вычитателя, выход регистра второй исходной координаты подключен ко входу второго коммутатора и ко входу уменьшаемого второго вычитателя, выходы первого и второго коммутаторов подключены ко вторым входам соответственно первого и второго накапливающих сумматоров, выходы третьего и четвертого двухпозиционных ключей подключены соответственно ко входам регистров результирующим координат, выход блока управления замыканием ключей групп двухпозиционных ключей подключен к управляющим входам ключей групп двухпозиционных ключей.
Текст
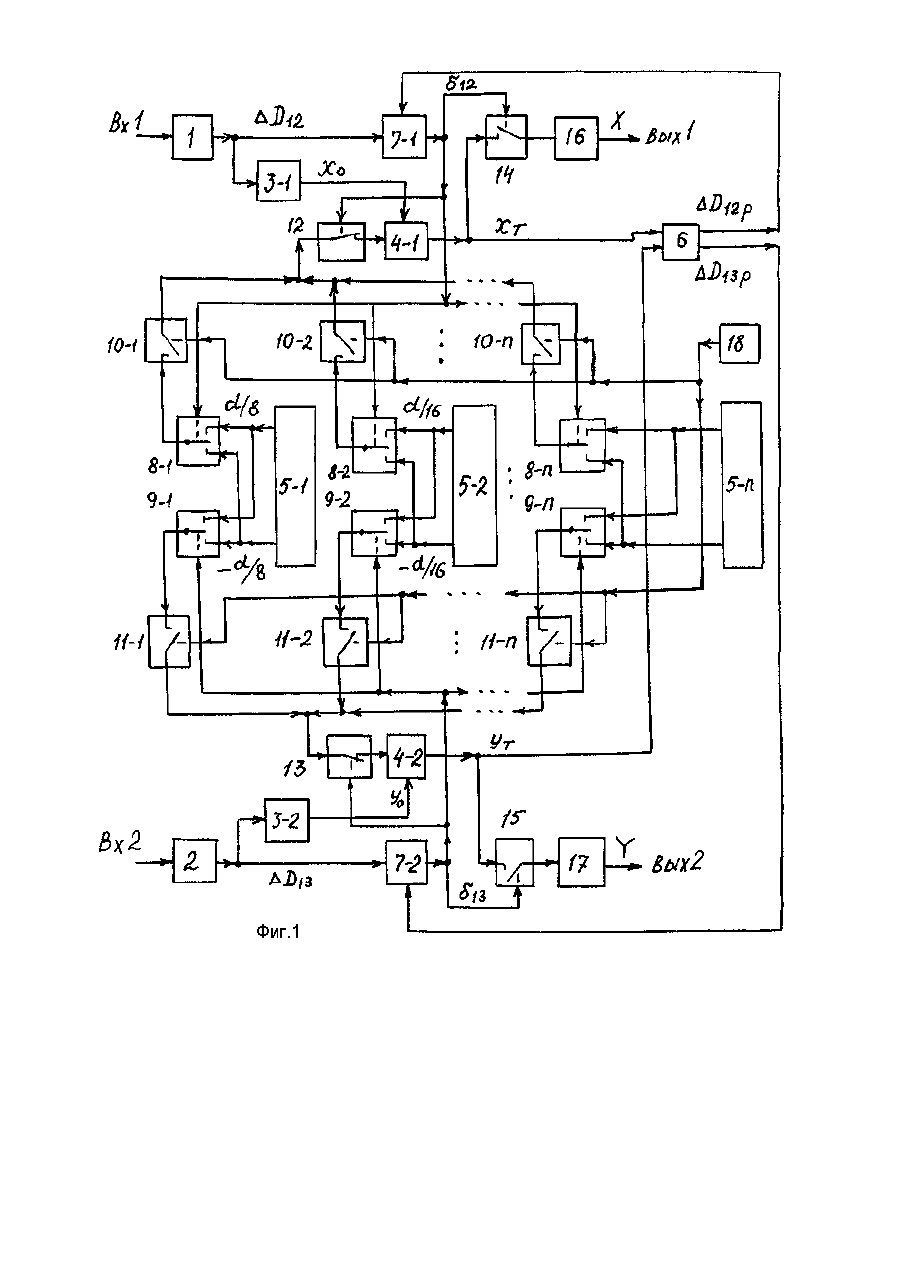
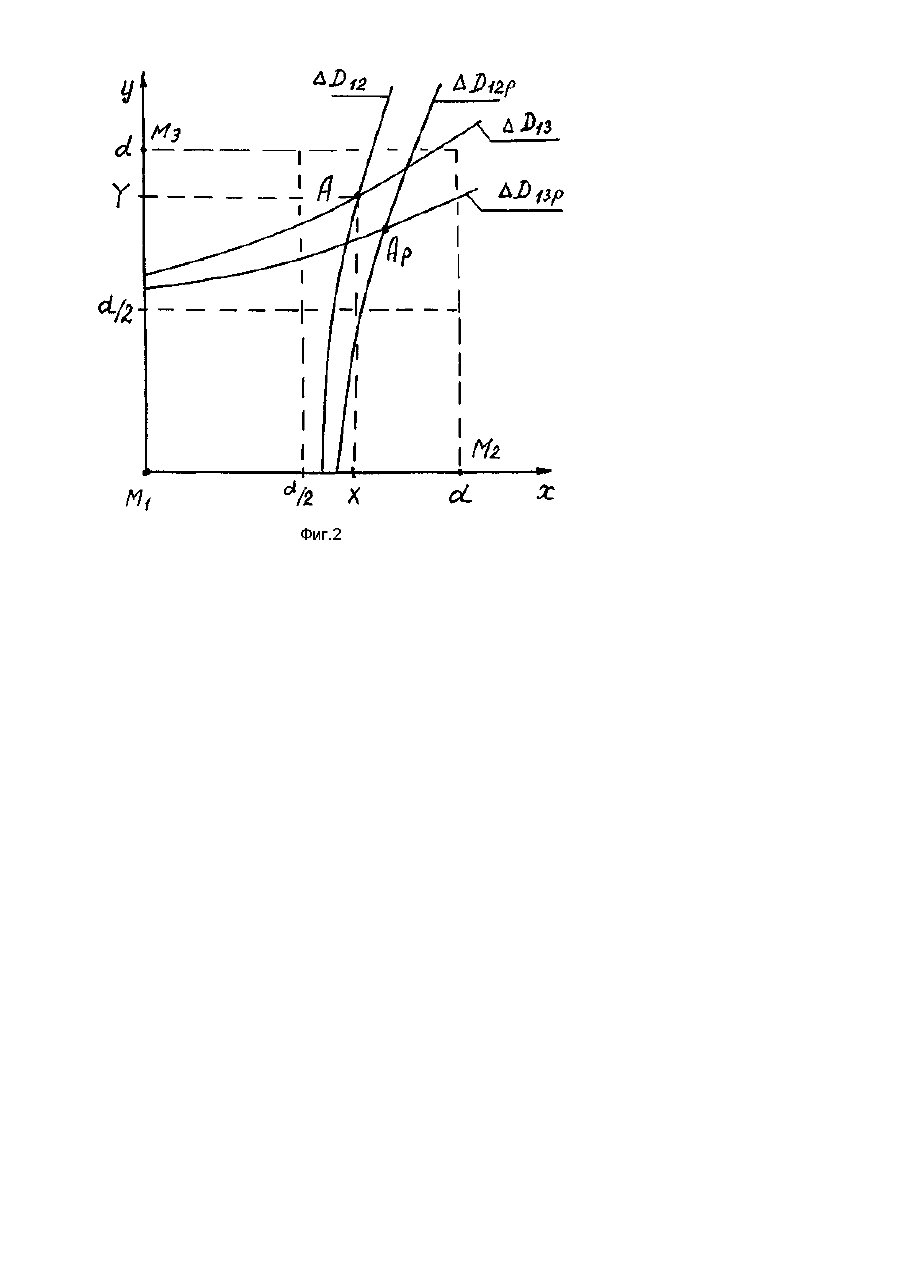
Предполагаемое изобретение относится к вычислительной технике и может быть использовано в специализированных вычислителях координат, например, плавающих аппаратов. Оно имеет целью уменьшение времени преобразования координат по сравнению со временем преобразования координат в преобразователе координат по А.с. СССР №1517027, кл. G06F7/544. Известны функциональные преобразователи, описанные в А.с. №1136154 и №955082, кл. G06Р7/544. Первый ив них сложен, второй не позволяет преобразовывать гиперболические координаты в декартовы. Прототипом предполагаемого изобретения, представленного в настоящей заявке, является функциональный преобразователь координат, описанный в А.с.·№1517027. Недостатком прототипа является большое время, затрачиваемое на преобразование координат. Прототип является итерационным устройством, в котором при выполнении каждой итерации по нелинейной зависимости вычисляется расчетное значение одной из декартовых координат. Остановка вычислений производится по критерию модуля ошибки |δD| £ δDдоп, δDдоп - допустимая ошибка по dDдоп = 2dХ доп гиперболической координате. В прототипе , δХдоп - допустимая ошибка определения декартовой координаты. Наибольшее количество итераций необходимо при нахождении определяющегося объекта в окрестности дальней от начала координат вершине квадрата области действия преобразователя. При относительной ошибке определения декартовой координаты величиной 1% необходимо до 486 итераций. Решение задачи уменьшения времени, необходимого для преобразования координат, достигается благодаря введению новых по сравнению с прототипом устройств и связей. Введены n регистров хранения значений приращений результирующих координат, две группы по n трехпозиционных ключей, две группы по n двухпозиционных ключей, первый, второй, третий и четвертый двухпозиционные ключи и блок управления ключей групп двухпозиционных ключей, при этом осуществлен следующие связи. Первые информационные входы трехпозиционных ключей групп подключены к выходам регистров хранения указанных приращений. Вторые информационные входы трехпозиционных ключей групп подключены к выходам регистров хранения значений приращений с инвертированными знаками. Выходы трехпозиционных ключей подключены к информационным входам двухпозиционных ключей групп, выходы двухпозиционных ключей первой группы подключены к информационному входу первого двухпозиционного ключа, выходы двухпозиционных ключей второй группы подключены к информационному входу третьего двухпозиционного ключа. Выходы первого и второго двухпозиционных ключей подключены соответственно ко входам первого и второго накапливающих сумматоров. Выход первого накапливающего сумматора подключен к первому входу узла связи координат и к информационному входу третьего двухпозиционного ключа, выход второго накапливающего сумматора подключен ко второму входу узла связи координат и к информационному входу четвертого двухпозиционного ключа. Первый и второй выходы узла связи координат подключены соответственно ко входам вычитаемого вычитателей. Выход первого вычитателя подключен к управляющему входу третьего двухпозиционного ключа и управляющим входам трехпозиционных ключей первой группы, выход второго вычитателя подключен к управляющему входу четвертого двухпозиционного ключа и управляющим входам трехпозиционных ключей второй группы. Выходы двухпозиционных ключей первой группы подключены к информационному входу первого двухпозиционного ключа, выходы двухпозиционных ключей второй группы подключены к информационному входу второго двухпозиционного ключа. Выходы первого и второго двухпозиционных ключей подключены соответственно к первым входам первого и второго накапливающих сумматоров. Выход регистра первой исходной координаты подключен ко входу первого коммутатора и ко входу уменьшаемого первого вычитателя. Выход регистра второй исходной координаты подключен ко входу второго коммутатора и ко входу уменьшаемого второго вычитателя. Выходы первого и второго коммутаторов подключены ко вторым входам соответственно первого и второго накапливавших сумматоров. Выхода третьего и четвертого двухпозиционных ключей подключены соответственно ко входам регистров результирующих координат. Выход блока управления замыканием ключей групп двухпозиционных ключей подключен к управляющим входам двухпозиционных ключей групп. Эти отличия от прототипа являются существенными, а решаемая задача - уменьшение времени преобразования путем уменьшения числа итераций - является технически полезной, т.к. быстродействующий преобразователь может быть использован на высокоскоростном объекте. На фиг.1 показана функциональная схема предлагаемого преобразователя, на фиг.2 - система координат. На фиг.1 и 2 обозначены: 1 и 2 - регистры первой и второй исходных /гиперболических/ координат; 3-1, 3-2 коммутаторы; 4-1, 4-2 накапливающие сумматоры; 5-1, 5-2,…, 5-n - регистры хранения значений приращений /"добавок"/ результирующих координат; 6 - узел связи координат; 7-1, 7-2 - вычитатели; 8-1, 8-2,…8-n, 9-1, 9-2,…, 9-n - две группы трехпозиционных ключей; 10-1, 10-2,…, 10-n, 11-1, 11-2,…, 11-n - две группы двухпозиционных ключей; 12, 13, 14, 15 – первый, второй, третий и четвертый двухпозиционные ключи; 16, 17 - регистры результирующих /декартовых/ координат; 18 - блок управления замыканием ключей групп двухпозиционных ключей; Х, Y - оси декартовой системы; MI, М2, M3 - излучатели навигационных сигналов /маяков/; А - точка истиннoго положения определяющегося объекта; Ap - тoчка расчетного /на конкретной итерации/ положения определяющегося объекта; d - база /расстояние между маяками MI, М2; MI, M3/; DD12, DD13, DD12p, DD13p - истинные и расчетные значения гиперболических координат; Х и Y - истинные значения декартовых координат. Устройства 1-4, 6, 7 имеются и в прототипе. В описании прототипа не указаны устройства 16, 17 /регистры результирующих координат/, но наличие их очевидно специалисту. Таким образом, общими для прототипа и предлагаемого преобразователя являются устройства 1-4, 6, 7, 16, 17. Новыми по сравнению с прототипом являются устройства 5, 8-15, 18 и описанные выше связи. Рассмотрим работу предлагаемого преобразователя. Преобразуются гиперболические координаты DD12, DD13 в декартовы Х, Y. База d известна. Измерены и зафиксированы в регистрах 1, 2 значения гиперболических координат DD12, DD13. Коммутаторы, как и в прототипе, соответственно знакам DD12 и DD13 на своих выходах установят значения X0 и Y0 соответственно зависимостям. ì X01 = 0,25 d, DD12 < 0, (1) X0 = í î X02 = 0,75d , DD12 ³ 0, ì Y = 0,25d , DD13 0, то добавка составит d/8, если δ < 0, то добавка -(d/8). Добавки являются приращениями значений результирующих координат. На выходе накапливающего сумматора 4-1 образуется текущее значение XТ = X0 + d/8 или XТ = X0 - d/8. Соответственно на выходе сумматора 4-2 YТ = Y0 + d/8 или YТ = Y0 - d/8. Узел связи координат вычислит новые значения ΔD12p, ΔD13p по зависимостям (3), (4). Процесс будет итерционно продолжаться. Блок 18 на следующем шаге подключит на вход накапливающего сумматора добавки d/16 или -(d/16), далее, если вычисления не остановятся по критерию модуля ошибки, d/32 или –(d/32) соответственно знаку δ. Т.е., модуль добавки на каждой итерции уменьшается и на і-м шаге составляет (d/8)i+2. При этом расчетные значения ΔD12p, ΔD13p стремятся к истинным ΔD12, ΔD13, разности δ ® 0, текущие Хт, Yт стремятся к значениям декартовьк координат X , Y. При |δ12| £ δдоп, |δ13| £ δдоп, как и в прототипе, вычисления будут остановлены. Ключи 14, 15 замкнутся и на регистрах 16, 17 образуется коды текущих значений Xт, Yт данной итерации, которые принимаются в качестве декартовых координат X и Y. Преобразователь, как и прототип, является системой с обратными связями, замыкаемой по разностям /ошибкам/ δ12, δ13. Устойчивость ее обеспечена тем, что приращения результирующих координат уменьшается на каждой итерации, что изначально заложено в систему. Большие начальные приращения обесппечивают высокое быстродействие, уменьшающиеся по модулю приращения обеспечивают устойчивость работы преобразователя. Можно показать, что в прототипе требуется число итераций, равное Njпт = E (1/KδД), в предлагаемом преобразователе Njпт = Е[-(lnδД/ln2), Е – символ целого, не меньшего, чем значение выражения, стоящего под Е; К – коэффициент передачи контура, замкнутого обратной связью в прототипе, δД допустимая·ошибка определения декартовой координаты. При δД = 1% в предлагаемом преобразователе требуется не более 7 итераций. Все устройства, вводимые в предлагаемый преобразователь, являются общеизвестными устройствами вычислительной техники. Реализация узла связи координат приведена в описаниях прототипа /А.с. №1517027/.
ДивитисяДодаткова інформація
Автори англійськоюCherneha Viktor Stepanovych
Автори російськоюЧернега Виктор Степанович
МПК / Мітки
МПК: G06F 7/548
Мітки: координат, перетворювач, декартову, системі, гіперболічної
Код посилання
<a href="https://ua.patents.su/4-44744-peretvoryuvach-koordinat-iz-giperbolichno-sistemi-u-dekartovu.html" target="_blank" rel="follow" title="База патентів України">Перетворювач координат із гіперболічної системи у декартову</a>
Кодуючій перетворювач

Номер патенту: 40555
Опубліковано: 16.07.2001
Автори: Маранов Олександр Вікторович, Чигирин Юрій Трохимович, Сіренко Микола Васильович, Бондаренко Володимир Михайлович
МПК: H03M 1/12, H03M 13/00
Мітки: перетворювач, кодуючий
Формула / Реферат:
Формула изобретенияКодирующий преобразователь, содержащий компаратор, вход которого является входом преобразователя, первый дешифратор, выход которого подключен к входу индикатора, и первый аналого-цифровой преобразователь, отличающийся тем, что, с целью повышения точности преобразователя, в него введены генератор импульсов, второй, третий и четвертый дешифраторы, делители, счетчики, регистры, триггер, вычитатель, сумматор, квадратор,...
Перетворювач переміщення у послідовність імпульсів
Номер патенту: 5042
Опубліковано: 28.12.1994
Автори: Забішна Наталія Артемівна, Рубінштейн Григорій Маркович, Суходольський Сергій Олександрович, Перельмутер Віктор Моісейович
Мітки: імпульсів, перетворювач, переміщення, послідовність
Формула / Реферат:
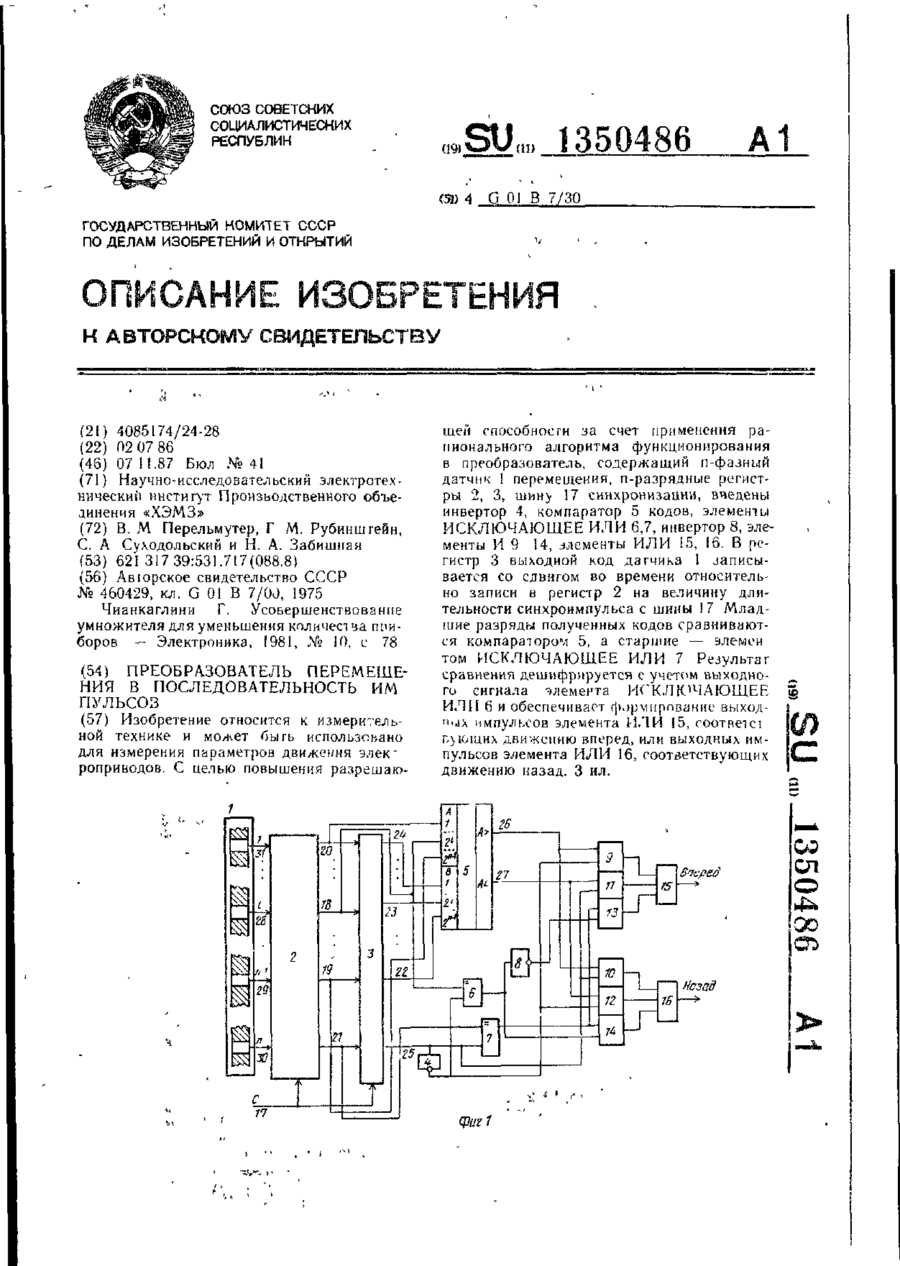
Преобразователь перемещения в последовательность импульсов, содержащий n-фазный датчик перемещения, два n-разрядных регистра, шину синхронизации, выходы n-фазного датчика перемещения подключены к входам данных первого регистра, выходы которого подключены к входам данных второго регистра, шина синхронизации подключена к синхровходам первого и второго регистров, отличающийся тем, что, с целью повышения разрешающей способности, в него...
Перетворювач змінної напруги в постійну /його варіанти/
Номер патенту: 29492
Опубліковано: 15.11.2000
Автор: Самокиш Вячеслав Васильович
МПК: H02M 7/12, H02M 7/217
Мітки: постійну, напруги, змінної, його, перетворювач
Текст:
...первого транзистора и первый вывод первого резистора соединены и образуют первый вывод токочу в ствительного элемента, второй вывод ко торого образуют соединенные база первого тран зистора и второй вывод первого резистора, а его управляющим выходом служит коллектор тран зистора, а ключ содержит второй транзистор и второй резистор, причем эмиттер второго тран зистора служит первым выводом ключа, объеди ненные первый вывод второго резистора и...
Система телемеханіки
Номер патенту: 7702
Опубліковано: 26.12.1995
Автори: Верховський Яків Маркович, Прошин Володимир Володимирович, Лагунович Євген Федорович, Сидяк Володимир Олександрович
МПК: G08C 19/28
Мітки: телемеханіки, система
Формула / Реферат:
Система телемеханики, содержащая на пункте управления генератор импульсов, первый и второй распределители импульсов, первый и второй формирователи импульсов, первый выход первого распределителя подключен к входу второго распределителя и к первому входу первого формирователя импульсов, первый и второй выходы последнего соединены соответственно с первой и второй шинами линии связи, последний выход второго распределителя подключен к...
Безконтактний перемикаючий пристрій грубого і точного каналів
Номер патенту: 17553
Опубліковано: 06.05.1997
Автори: Аркадьєв Віктор Юрійович, Літучий Олександр Володимирович, Дурнов Володимир Адольфович, Кузнєцов Володимир Анатольович, Рудакова Ганна Володиміровна
МПК: G05B 11/01
Мітки: каналів, точного, грубого, пристрій, безконтактний, перемикаючий
Формула / Реферат:
Бесконтактное переключающее устройство грубого и точного каналов, содержащее первый и второй ограничители сверху, входы которых являются входом устройства, а выходы подключены к входам, соответственно, первого и второго усилителей, выход первого усилителя подключен к первому инвертирующему входу сумматора и входу первого ключа, выход второго усилителя подключен к второму входу сумматора, выход которого соединен с входом первого...
Попередній патент: Автоматизований p-i-n-діодний рефлектометричний вимірювач s-параметрів нвч-пристроїв
Наступний патент: Вогневий насадок газового пальника
Випадковий патент: Обчислювальна система