Спосіб вимірювання дальності
Номер патенту: 45646
Опубліковано: 15.04.2002
Автори: Полюга Валентин Петрович, Обод Іван Іванович, Силич Валерій Прокопович
Формула / Реферат
Спосіб вимірювання дальності, який полягає в тому, що запитником випромінюють кодовий сигнал запиту дальності на несівній частоті f1, який приймають відповідачем, декодують, випромінюють кодовий сигнал відповіді на несівній частоті f2, який приймають та декодують запитником і по часу запізнювання між випроміненим та прийнятим кодовим сигналами вимірюють дальність, який відрізняється тим, що кожний кодовий сигнал запиту дальності міжперіодно обробляють, а момент випромінення кодових сигналів запиту суміщають з наперед відомим значенням часової шкали, яка єдина для всієї системи.
Текст
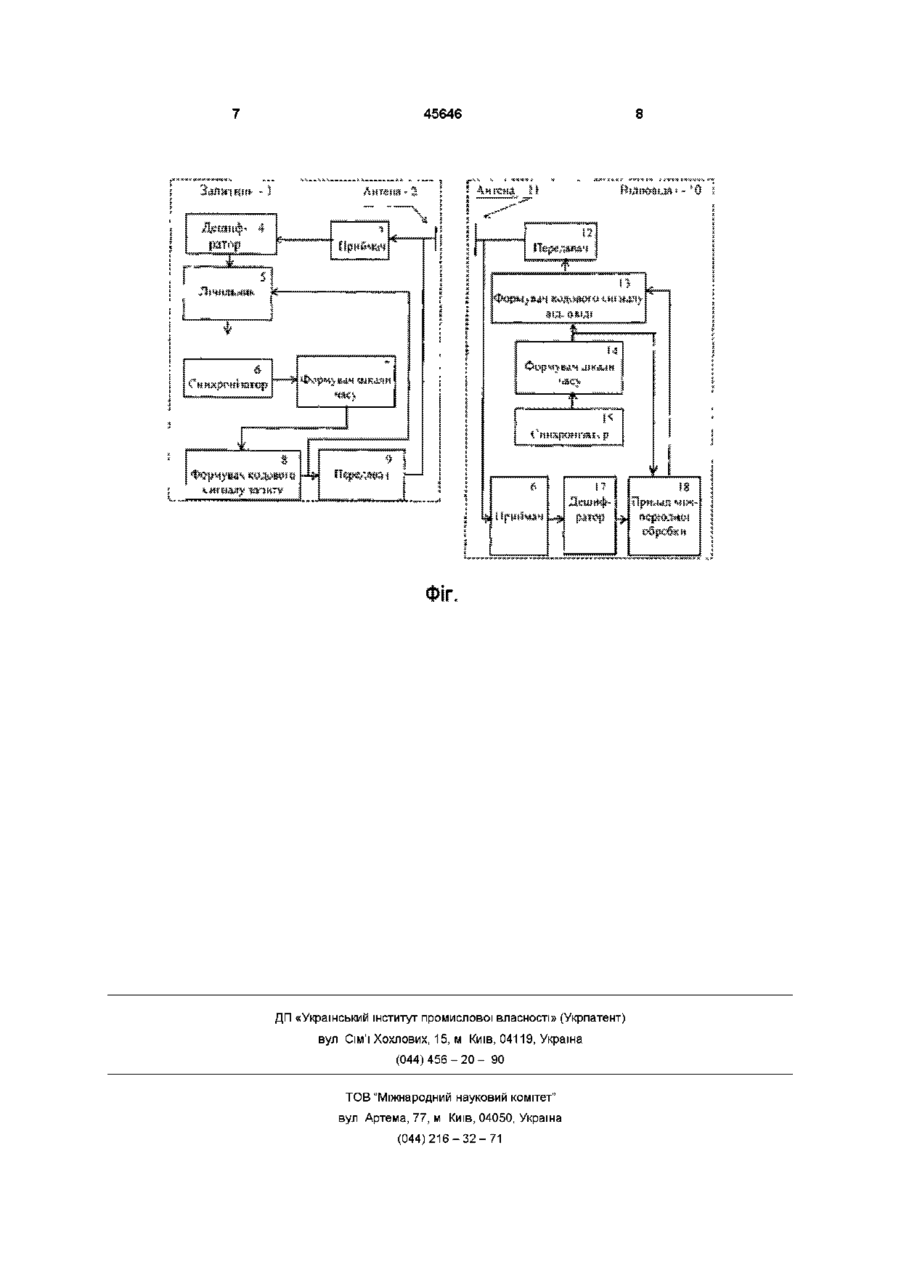
Спосіб вимірювання дальності, який полягає в тому, що запитником випромінюють кодовий сигнал запиту дальності на несівній частоті f-i, який приймають відповідачем, декодують, випромінюють кодовий сигнал ВІДПОВІДІ на несівній частоті f2, який приймають та декодують запитником і по часу запізнювання між випромшеним та прийнятим кодовим сигналами вимірюють дальність, який відрізняється тим, що кожний кодовий сигнал запиту дальності міжперюдно обробляють, а момент випромінення кодових сигналів запиту суміщають з наперед відомим значенням часової шкали, яка єдина для всієї системи Винахід, що пропонується, відноситься до галузі систем радіонавігації і призначений, зокрема, для вимірювання дальності в системах ближньої навігації Відомий спосіб вимірювання дальності полягає в тому, що запитником випромінюють сигнал запиту дальності, який приймають та декодують відповідачем, затримують на певний час і випро спроможність, так і завадостійкість даного способу Справді, у відомому способі до обслуговування приймають всі сигнали запиту дальності, серед яких можуть бути несанкціоновані запити протилежної сторони, а також сигнали запиту, що утворилися в результаті хибних тривог першого та другого роду Недоліком відомого способу є низька завадостійкість Найбільш близьким технічним рішенням, обраним в якості прототипу, є спосіб вимірювання дальності, у якому запитником випромінюють кодовий сигнал запиту дальності на несівній частоті f-i, який приймають відповідачем, декодують, затримують на певний час і випромінюють кодовий сигнал ВІДПОВІДІ дальності на несівній частоті f2, який приймають та декодують запитником і по часу запізнювання між випроміненим та прийнятим кодовим сигналами дальності вимірюють дальність [2] Спільними ознаками прототипу та способу, що заявляється, є прийоми та операції запитником випромінюють сигнал запиту дальності, який приймають та декодують відповідачем і випромінюють кодовий сигнал ВІДПОВІДІ дальності, який приймають та декодують запитником і по часу запізнювання між випроміненим та прийнятим кодовим сигналами дальності вимірюють дальність Відомий спосіб вимірювання дальності побудований по принципу відкритої системи масового обслуговування і його практична реалізація засно мінюють кодовий сигнал ВІДПОВІДІ, ЯКИЙ приймають та декодують запитником і по часу запізнювання між випромшеним та прийнятим кодовим сигналами вимірюють дальність [1] Спільними ознаками аналогу і способу, що заявляється, є прийоми та операції запитником випромінюють сигнал запиту дальності, який приймають та декодують відповідачем і випромінюють кодовий сигнал ВІДПОВІДІ, ЯКИЙ приймають та деко дують запитником і по часу запізнювання між випромшеним та прийнятим кодовим сигналами вимірюють дальність Однак практична реалізація відомого способу заснована на випромшенні запитником коду запиту Цей код приймають відповідачем, декодують і по результату декодування випромінюють кодовий сигнал за допомогою відповідача Кодовий сигнал відповідача приймають та декодують запитником По часу запізнювання між випроміненим та прийнятим кодовим сигналами на запитнику вимірюють дальність Таким чином, у відомому способі на кожний запитний сигнал дальності формують сигнал ВІДПОВІДІ, що значно знижує як пропускну (О (О ю 45646 вана на випромшенні запитником кодового сигнавим сигналами ВІДПОВІДІ дальності вимірюють далу запиту дальності Цей кодовий сигнал запиту льність приймають відповідачем, декодують та по резульТаким чином, у запропонованому способі, затату декодування за допомогою відповідача вивдяки новим операціям, вдається організувати промінюють певний кодовий сигнал ВІДПОВІДІ КОобслуговування не запиту дальності, як здійснюДОВИЙ сигнал відповідача приймають та декодують ється у прототипі, а кожного запитника дальності запитником По часу запізнювання між запитним та Це дозволяє вилучити з обслуговування навмисні кодовим сигналом ВІДПОВІДІ вимірюють дальність корельовані завади (проведення операції міжперіТаким чином, у відомому способі на кожний запитодної обробки, яка може бути проведена тільки ний сигнал дальності формується сигнал ВІДПОВІДІ при суміщені моменту випромшення кодових сигдальності, що значно знижує як пропускну спроналів запиту з загодя відомим значенням часової можність, так і завадостійкість даного способу шкали, єдиної для усієї системи, дозволяє виклюСправді, у відомому способі не виключена можличити обслуговування навмисних корельованих вість несанкціонованого використання відповідача завад за рахунок того, що вони не входять до віпротилежною стороною, що дозволяє повністю домої нам часової ПОСЛІДОВНОСТІ І, отже, не прохопаралізувати всю систему вимірювання дальності, дять крізь систему міжперюдної обробки), а також а отже, і всю систему ближньої навігації, реалізодозволяє значно зменшити ймовірність утворення вану на даному способі Це викликане відсутністю сигналів запиту на підставі хибних тривог першого операцій у відомому способі, що дозволять виклюта другого роду (за рахунок того, що проводиться чити несанкціоноване використання відповідача операція міжперюдної обробки), що приводить до протилежною стороною, а також істотно зменшити підвищення завадостійкості запропонованого споймовірність утворення запитних сигналів на підсобу ставі ймовірності хибних тривог першого та другоПропонований спосіб по виконуваним операціго роду ям може бути реалізований як відкрита система масового обслуговування з очікуванням, в той час Недоліком способу - прототипу є низька заваяк спосіб-прототип - як відкрита система масового достійкість обслуговування з відмовою Це також істотно В основу винаходу поставлено завдання ствовпливає на підвищення завадостійкості запропорити спосіб вимірювання дальності шляхом ввенованого способу в порівнянні з прототипом денням нових операцій суміщення моментів випромшення кодових сигналів запиту дальності з Таким чином, у запропонованому способі, запевним значенням часової шкали та міжперюдної вдяки новим операціям, вдається організувати обробки сигналів запиту дальності у відповідачі, міжперюдну обробку сигналів запиту, що приймазабезпечити виключення можливості несанкціоноються відповідачем Це дозволяє виключити з обваного використання відповідача, а також забезслуговування несанкціоновані запити (бо протилепечити можливість переходу від обслуговування жній стороні невідома часова програма кожного сигналу запиту дальності на обслуговуформування запитних сигналів дальності, тому вання пачки сигналів запиту дальності від конкретйого несанкціоновані запити дальності будуть ного запитника дальності і за рахунок цього підвисприйматися системою як несинхронна завада, щити завадостійкість яку міжперюдною обробкою виключають з обслуговування, що дозволяє значно зменшити ймовірПоставлене завдання вирішується тим, що в ність утворення сигналів запиту дальності на підспособі вимірювання дальності, який полягає в ставі хибних тривог першого та другого роду), що тому, що запитником випромінюють кодовий сигпризводить до підвищення завадостійкості запронал запиту дальності на несівній частоті fi, який понованого способу приймають відповідачем, декодують, випромінюють кодовий сигнал ВІДПОВІДІ на несівній частоті f2 Спосіб, що пропонується, може бути реалізоякий приймають та декодують запитником і по чаваний, наприклад, за допомогою системи навігації, су запізнювання між випромшеним та прийнятим структурна схема якої наведена на кресленні Сикодовим сигналами вимірюють дальність, кожний стема навігації містить запитник 1, у складі антени кодовий сигнал запиту дальності міжперюдно об2, приймача 3, дешифратора 4, лічильника 5, синробляють, а момент випромшення кодових сигнахронізатора 6, формувача шкали часу 7, формувалів запиту суміщають наперед відомим значенням ча кодового сигналу запиту 8, передавача 9, відчасової шкали, яка єдина для усієї системи повідача 10 у складі антени 11, передавача 12, формувача кодового сигналу ВІДПОВІДІ 13, формуСуттєвість запропонованого способу полягає в вача шкали часу 14 синхронізатора 15, приймача наступному 16, дешифратора 17 та приладу міжперюдної обНа запитнику та відповідачі виробляють синробки 18 хронні шкали часу системи навігації, з якими і суміщають моменти випромшення кодових сигналів При цьому антена 2 запитника 1 з'єднана з визапиту дальності Із запитника у певний момент ходом передавача 9 і з входом приймача 3, вихід часу, відомий для всіх споживачів системи ближякого з'єднаний з входом дешифратора 4, вихід ньої навігації, випромінюють сигнал запиту дальякого з'єднаний з першим входом лічильника 5, ності Цей кодовий сигнал запиту приймають відвихід якого являється виходом системи навігації, а повідачем, декодують, міжперюдно обробляють і другий вхід - з виходом формувача кодового сигпо результату міжперюдної обробки формують налу запиту 8, вхід якого з'єднаний з виходом фокодовий сигнал ВІДПОВІДІ КОДОВИЙ сигнал ВІДПОВІДІ рмувача шкали часу 7, вхід якого з'єднаний з видальності приймають за допомогою запитника, у ходом синхронізатора 6, а другий вихід формувача якому по часу запізнювання між запитним та кодокодового сигналу запиту 8 з'єднаний з входом пе редавача 9 а антена 11 відповідача 10 з'єднана з входом приймача 16 та з виходом передавача 12 вхід якого з'єднаний з виходом формувача кодового сигналу ВІДПОВІДІ 13, синхровхід якого з'єднаний з синхровходом приладу міжперюдної обробки 18 і з виходом формувача шкали часу 14, вхід якого з'єднаний з виходом синхронізатора 15, а інформаційний вхід формувача кодового сигналу ВІДПОВІДІ 13 з'єднаний з виходом приладу міжперюдної обробки 18, вхід якого з'єднаний з виходом дешифратора 17, вхід якого з'єднаний з виходом приймача 14 Спосіб, що пропонується, реалізують слідуючим чином На виходах формувачів шкал часу 7 та 14 постійно виробляють синхронні шкали часу системи навігації, що періодично синхронізують за допомогою синхронізаторів 6 та 15 3 виходів формувачів шкал часу 7 та 14 коди часу надходять на входи формувача кодового сигналу запиту 8 та формувача кодового сигналу ВІДПОВІДІ 13 І на синхровхід приладу міжперюдної обробки 18 3 виходу формувача кодового сигналу запиту 8 сигнал запиту дальності поступає на другий вхід (запуску) лічильника 5 і на вхід передавача 9, за допомогою якого та антени 2 кодовий сигнал запиту дальності випромінюють у простір Цей сигнал приймають антеною 11 відповідача 10 приймачем 16, з виходу якого прийнятий сигнал поступає на дешифратор 17, з виходу якого він поступає на прилад міжперюдної обробки 18 Прилад міжперюдної обробки 18, використовуючи сигнали формувача шкали часу 14, аналізує наявність сигналу запиту дальності на лінії рівних відстаней у декількох періодах повторення та видає сигнал тільки при виконанні критерію "к з т " При виконанні цього критерію на виході приладу міжперюдної обробки 18 формується сигнал, що надходить на вхід формувача кодового сигналу ВІДПОВІДІ 13 Формувач кодового сигналу ВІДПОВІДІ 13 формує на своєму виході у даний час кодовий сигнал ВІДПОВІДІ, КОД якого відомий всім споживачам, і в подальшому за допомогою передавача 12 та антени 11 випромінюють їх у простір На запитнику ці сигнали за допомогою антени 2 та приймача 3 приймають та обробляють Сигнали з виходу приймача 3 поступають на дешифратор 4, сигнал з виходу якого поступає на перший вхід (зупинки) лічильника 5 Вихідний імпульс дешифратора 4 зупиняє лічення лічильника 5, рахунок якого відповідає дальності між запитником та відповідачем Таким чином, у лічильнику 5 формується код дальності між запитником 1 та відповідачем 10 В подальшому робота приладу аналогічна Спосіб, що пропонується, у порівнянні з прототипом має наступну технічну перевагу Завдяки введенню нових операцій, вдається організувати обслуговування не запиту дальності, як здійснюється у прототипі, а кожного запитника дальності, що дозволило вилучити із обслутовання навмисні корельовані завади, а також дозволило значно зменшити ймовірність утворення сигналів запиту 45646 на підставі хибних тривог першого та другого роду, що привело до підвищення завадостійкості запропонованого способу Технічна реалізація означених на кресленні блоків може бути самою різноманітною і не викликає труднощів для розробників радіоелектронної апаратури Основні блоки такі ж, як і у існуючих систем ближньої навігації [2] На кресленні не показані антенні перемикачі Кожний дешифратор включає до себе крім себе і лічильник (на кресленні не показаний) Формувачі запитних та кодових сигналів ВІДПОВІДІ 8 та 13 можуть бути реалізовані на пристрої затримки та елементі «ИЛИ» Структура кодових сигналів може бути самою різноманітною, зокрема повторювати структуру запитних сигналів системи навігації [2] Формувачі часових шкал 7 та 14 можуть бути виконані по схемі, наведеній у [5] та містити високостабільний опорний генератор, вихід якого з'єднаний з входом дільника частоти, з виходу якого знімаються мітки часу, що у подальшому підраховуються лічильниками, з паралельних виходів яких і знімають код часу При цьому у певний момент часу із синхронізаторів 6 та 15 поступають імпульси синхронізації, за допомогою яких приводяться у ВІДПОВІДНІСТЬ шкали часу Синхронізація шкал часу може бути виконана по різному, зокрема з використанням сигналів супут-никового радюнавигаційного комплексу типу '"Навстар" [4] Як показано в [4], точність синхронізації часу може скласти десятки наносекунд Прилад міжперюдної обробки 18 може бути реалізований по структурній схемі наведеній у [6] Спосіб, що пропонується, у порівнянні з прототипом має наступну технічну перевагу Завдяки введенню нових операцій, вдається виключити несанкціоноване використання відповідачів протилежною стороною і значно послабити ймовірність утворення запитних сигналів на підставі хибної тривоги першого та другого роду, що дозволило підвищити завадостійкість запропонованого способу у порівнянні з відомими Джерела інформації 1 Белавин О В Основы радионавигации - М Советское радио, 1967 - С 211 -212 2 Сосновский А А , Хаймович И А Авиационная радионавигация Справочник — М Транспорт, 1980 - С 90-91 (прототип) 3 Чердынцев В А Радиотехнические системы - Минск, "Высшая школа", 1988 - рис 219, 2 20, С 57-59 4 Готьє Ф Перенос времени и частоты в расположение неподвижных станций Перевод № Н53342 ГПНТБ - М 1987 5 Шполянський В А, Курицький А М Программно-временные задатчики - М Машиностроение, 1984 - С 28, рис 1 9 6 Ширман Я Д , Манжос В Н Теория и техника обработки радиолокационной информации на фоне помех - М Радио и связь, 1981 - С 81, рис 7 8 45646 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044)456-20- 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Автори англійськоюObod Ivan Ivanovych
Автори російськоюОбод Иван Иванович
МПК / Мітки
МПК: G01C 21/00
Мітки: спосіб, вимірювання, дальності
Код посилання
<a href="https://ua.patents.su/4-45646-sposib-vimiryuvannya-dalnosti.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання дальності</a>
Спосіб вимірювання дальності
Номер патенту: 45900
Опубліковано: 15.04.2002
Автори: Обод Іван Іванович, Полюга Валентин Петрович, Силич Валерій Прокопович
МПК: G01S 13/08
Мітки: дальності, спосіб, вимірювання
Формула / Реферат:
Спосіб вимірювання дальності, який полягає в тому, що запитником випромінюють кодовий сигнал запиту дальності на несівній частоті f1, який приймають відповідачем, випромінюють кодовий сигнал відповіді дальності на несівній частоті f2, який приймають та декодують запитником і за часом запізнювання між випромінюваним та прийнятим кодовим сигналами дальності вимірюють дальність, який відрізняється тим, що оцінюють амплітуду кожного імпульсу коду...
Спосіб вимірювання дальності
Номер патенту: 40335
Опубліковано: 16.07.2001
Автори: Вінник Анатолій Тихонович, Обод Іван Іванович, Полюга Валентин Петрович
МПК: G01C 21/00
Мітки: вимірювання, дальності, спосіб
Формула / Реферат:
Спосіб вимірювання дальності, який полягає в тому, що запитником випромінюють кодовий сигнал запиту дальності на несучій частоті f1, який приймають відповідачем, декодують, випромінюють кодовий сигнал відповіді дальності на несучій частоті f2, який приймають та декодують запитником, і по часу запізнювання між випромінюваним та прийнятим кодовим сигналами дальності вимірюють дальність, який відрізняється тим, що із прийнятих сигналів...
Спосіб опізнавання об’єктів
Номер патенту: 30861
Опубліковано: 15.12.2000
Автор: Обод Іван Іванович
МПК: G01S 13/78
Мітки: спосіб, опізнавання, об'єктів
Текст:
...прийнятих сигналів запиту, формувача шкали часу 12, а вихід - з дозволяючим входом кодового сигналу 11. Пропонований спосіб, через систему опізнавання, що подана на кресленні, реалізують слідуючим чином. На виходах формувачів шкал часу 6 і 12 постійно виробляють синхронні шкали часу системи пізнавання, які періодично синхронізують за допомогою синхронізаторів 5 і 13. З виходів формувачів шкал часу 6 і 12 коди часу надходять на входи...
Пристрій для вимірювання дальності та радіальної швидкості
Номер патенту: 15338
Опубліковано: 30.06.1997
Автори: Челпанов Володимир Валентинович, Самуль Юрій Володимирович
МПК: G01S 13/00
Мітки: радіальної, дальності, вимірювання, швидкості, пристрій
Формула / Реферат:
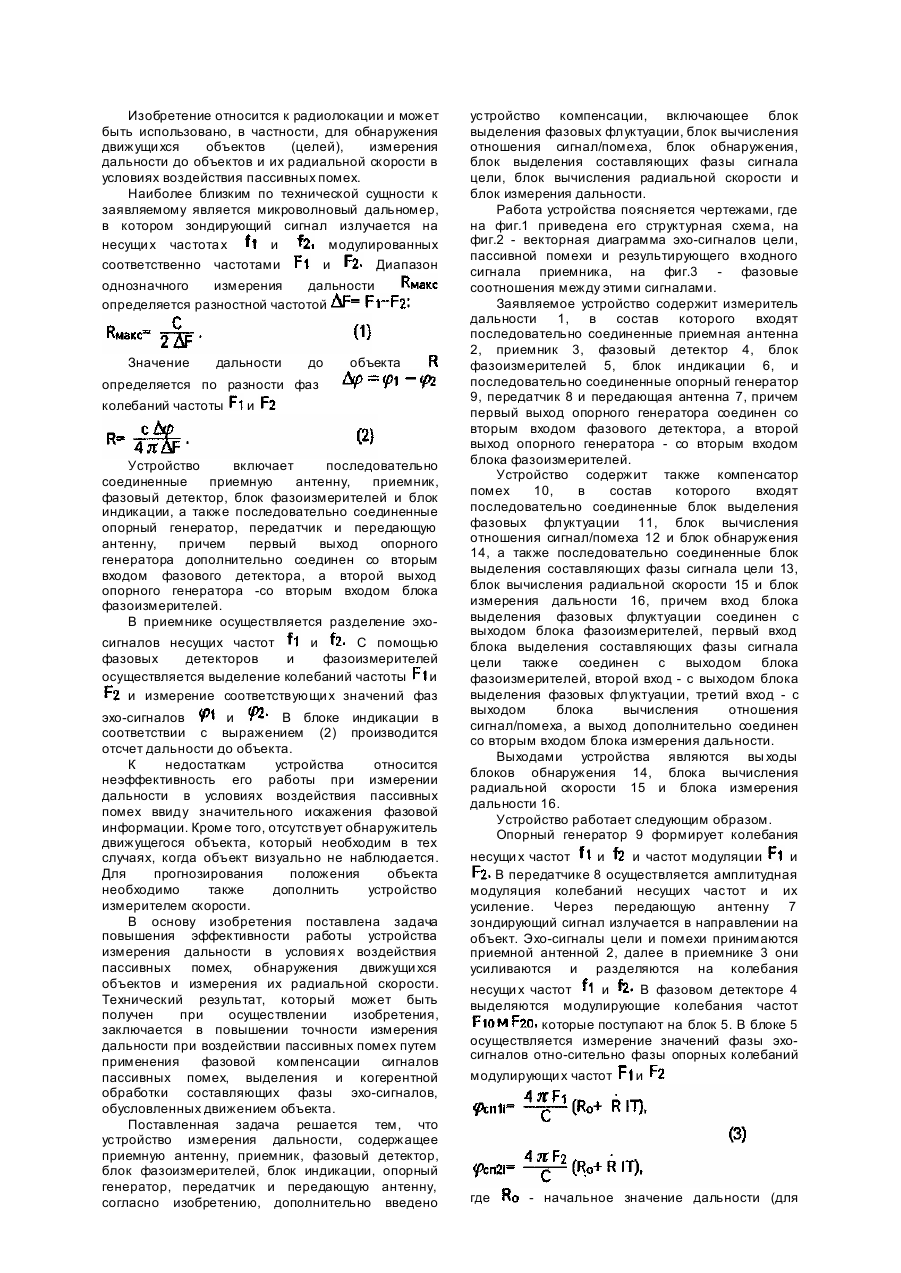
Устройство для измерения дальности и радиальной скорости, содержащее последовательно соединенные приемную антенну, приемник, фазовый детектор, блок фазоизмерителей и блок индикации, а также последовательно соединенные опорный генератор, передатчик и передающую антенну, причем первый выход опорного генератора дополнительно соединен со вторым входом фазового детектора, а второй выход -с вторым входом блока фазоизмерителей, отличающееся тем, что...
Спосіб визначення дальності об’єктів
Номер патенту: 33443
Опубліковано: 15.02.2001
Автори: Дяченко Дмитро Володимирович, Карпенко Владислав Володимирович, Карпенко Олег Володимирович, Даник Юрій Григорович
МПК: G01C 3/00
Мітки: об'єктів, визначення, спосіб, дальності
Текст:
...суміжну область простору, запам'ятовують дискретну інформацію про зображення сюжетів, що спостерігаються, послідовно суміщають суміжні по простор\ сюжети, що спостерігаються, шляхом порівняння дискретної інформації про N відповідних елементів попереднього і наступного зображень по спільній частині сюжетів, що потрапила у зону їхнього перекриття, запам'ятовують інтегровані кадри, що сформувалися, в запам'ятовуваючому приладі, а також здійснюють...
Попередній патент: Зв’язка для виготовлення абразивного інструменту
Наступний патент: Каталізатор – фільтр
Випадковий патент: Сімейний скутер