Монтажний возик ракети
Номер патенту: 4610
Опубліковано: 17.01.2005
Автори: Мокін Олександр Васильович, Мокін Андрій Олександрович, Песков Олексій Євгенович, Дорош Анатолій Прокопович, Тристан Анатолій Петрович, Анненков Валерій Євгенович
Формула / Реферат
1. Монтажний возик ракети, що містить основу з ходовою частиною, на якій за допомогою вертикального гідроциліндра змонтована поперечна балка, раму, взаємодіючу з поперечною балкою за допомогою пружного елемента, а з ложементом - за допомогою опорних роликів, і привід для повороту ложемента, який відрізняється тим, що він оснащений важільною системою, виконаною у вигляді парної кількості пар шарнірних важелів, рівномірно розташованих по периметру поперечної балки і з'єднуючих поперечну балку з рамою, при цьому один з важелів у кожній парі, розташованій на кінці поперечної балки, взаємодіє з регульованим упором, змонтованим на поперечній балці.
2. Монтажний возик ракети за п. 1, який відрізняється тим, що привід виконаний у вигляді тангенціально розташованого гвинта, один кінець якого встановлений у втулці, шарнірно закріпленій за допомогою вилки на рамі, а другий її кінець взаємодіє з гайкою, шарнірно закріпленою за допомогою додаткової вилки на ложементі.
3. Монтажний возик ракети за п. 1, який відрізняється тим, що він оснащений двома вертикальними гвинтовими упорами, які розташовані у поперечній площині возика, змонтовані на основі і штоки яких контактують з нижньою поверхнею поперечної балки.
4. Монтажний возик ракети за п. 1, який відрізняється тим, що він оснащений скобою, яка шарнірно закріплена на поперечній балці за допомогою осі, паралельної поздовжній осі ложемента, і охоплює шток одного з гвинтових упорів.
Текст
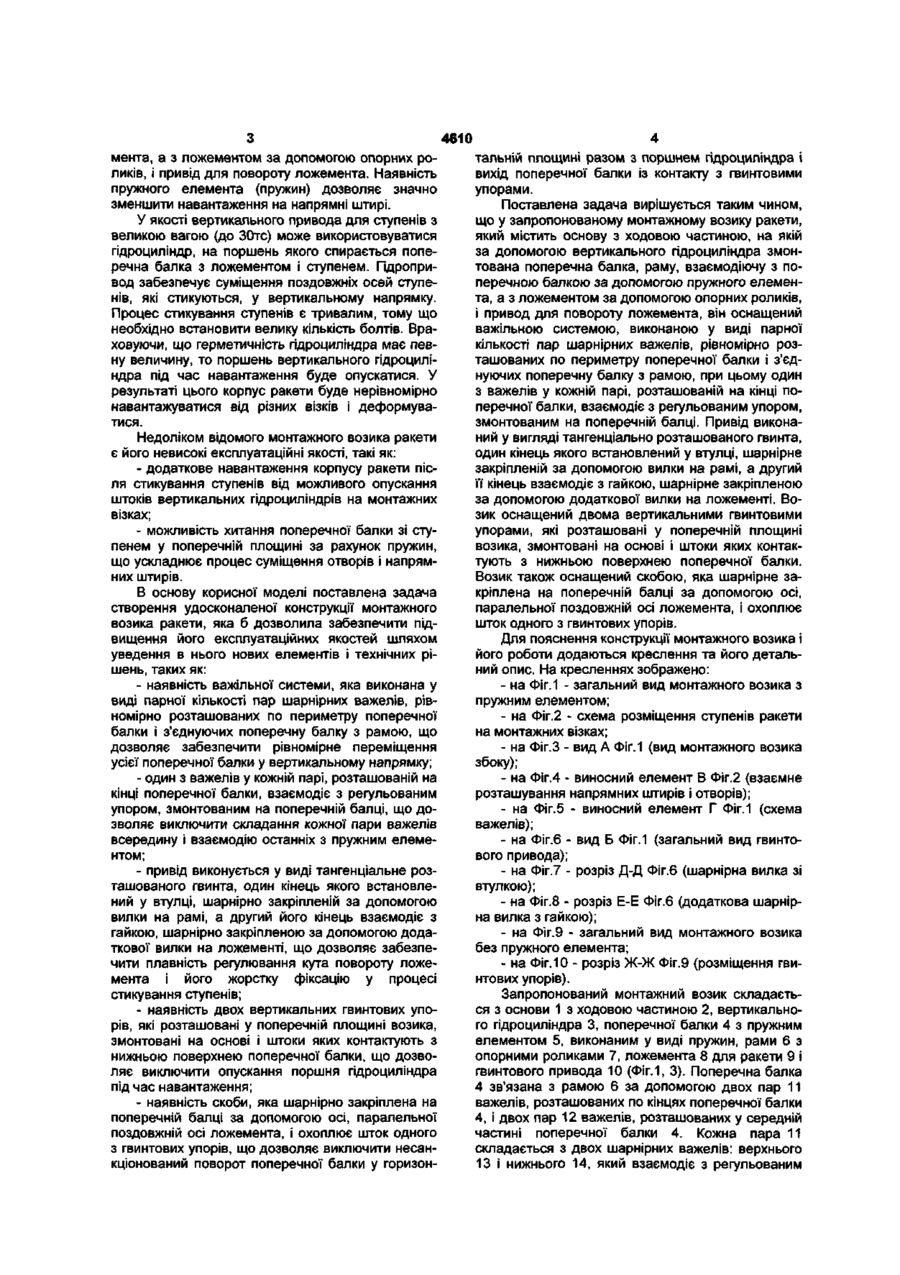
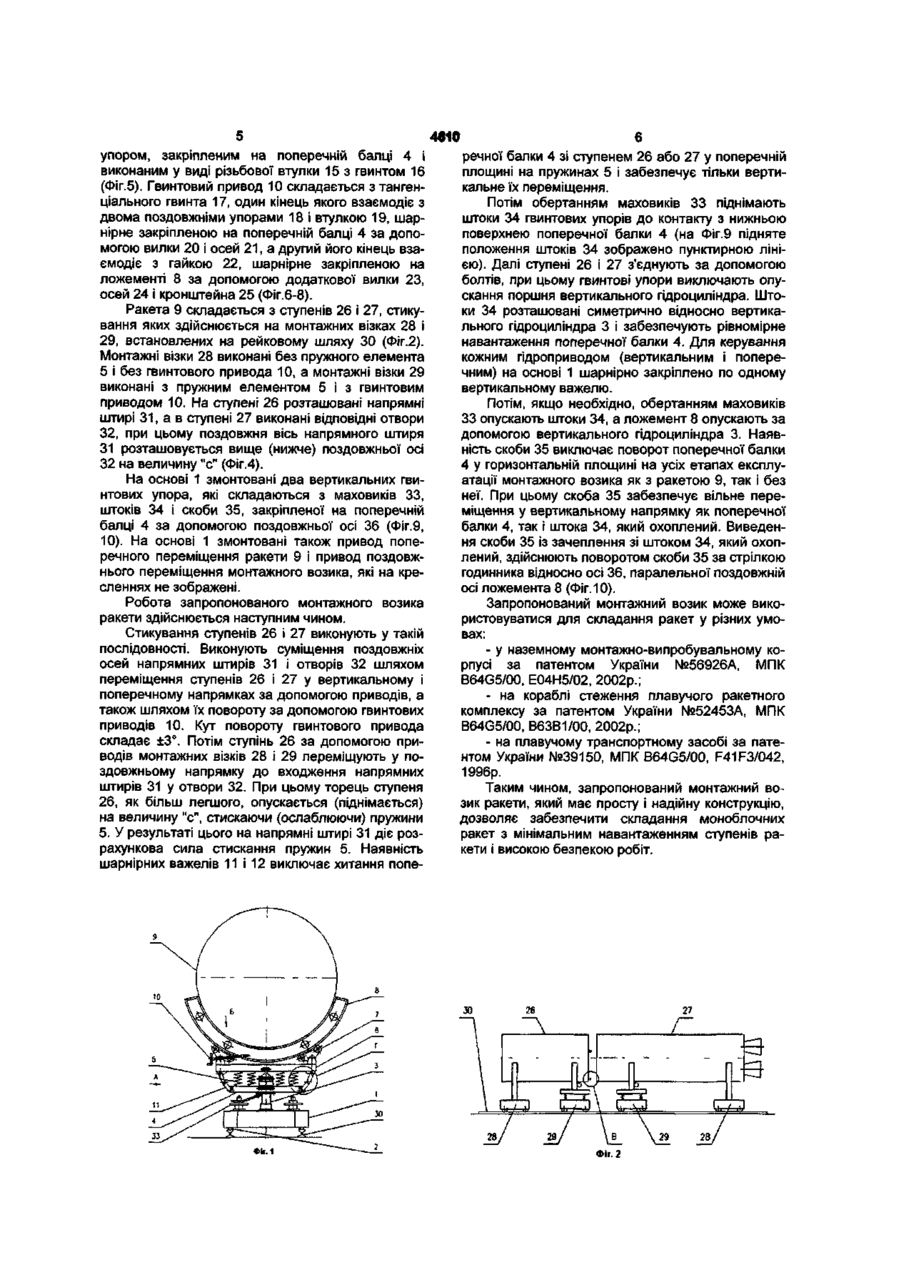
1. Монтажний возик ракети, що містить основу з ходовою частиною, на якій за допомогою вертикального гідроциліндра змонтована поперечна балка, раму, взаємодіючу з поперечною балкою за допомогою пружного елемента, а з ложементом за допомогою опорних роликів, і привід для повороту ложемента, який відрізняється тим, що він оснащений важільною системою, виконаною у вигляді парної кількості пар шарнірних важелів, рівномірно розташованих по периметру поперечної балки і з'єднуючих поперечну балку з рамою, при цьому один з важелів у кожній парі, розташованій на кінці поперечної балки, взаємодіє з регульованим упором, змонтованим на поперечній балці. 2. Монтажний возик ракети за п. 1, який відрізняється тим, що привід виконаний у вигляді тангенціально розташованого гвинта, один кінець якого встановлений у втулці, шарнірно закріпленій за допомогою вилки на рамі, а другий її кінець взаємодіє з гайкою, шарнірно закріпленою за допомогою додаткової вилки на ложементі. 3. Монтажний возик ракети за п. 1, який відрізняється тим, що він оснащений двома вертикальними гвинтовими упорами, які розташовані у поперечній площині возика, змонтовані на основі і штоки яких контактують з нижньою поверхнею поперечної балки. 4. Монтажний возик ракети за п. 1, який відрізняється тим, що він оснащений скобою, яка шарнірно закріплена на поперечній балці за допомогою осі, паралельної поздовжній осі ложемента, і охоплює шток одного з гвинтових упорів. Корисна модель відноситься до ракетнокосмічної галузі, а більш конкретно - до наземного обладнання і може використовуватися як монтажно-стикувальне обладнання для складання ракети. Відомим є монтажний возик ракети, який містить раму (основу) з колісною парою (ходовою частиною), роликові опори, які взаємодіють з ложементом, і привод для повороту ложемента (див. книгу Е.А.Джур, Л.Д.Кучма и др. "Технология производства космических ракет", Днепропетровск, ДГУ, 1992, с. 132 рис.6.7, а також авт.св. СРСР №1065125, МПК В23Р19/00, 1982р.). Вказані монтажні візки забезпечують стикування ступенів ракети і проведення її випробувань. Але використання цих монтажних візків для стикування ступенів призводить до наступних наслідків. Через те, що монтажні візки та ступені виготовляються з якоюсь точністю, то під час зближення торців ступенів напрямні штирі одного ступеня будуть зміщені відносно отворів другого ступеня уверх (униз) на деяку величину (2...Змм). Після уведення напрямних штирів у отвори, ступінь з отворами (ступінь з штирями) трохи підніметься і передасть частину своєї ваги на напрямні штирі. А через те, що вага ступеня складає 10...30тс, а кожен напрямний штир (за звичаєм три штирі) розрахований на 100...200кгс, то останні будуть деформуватись, що неприпустимо. Для суміщення отворів і напрямних штирів по колу використовують привод для обертання одного з опорних роликів, які за рахунок сили тертя повертають ложемент зі ступенем. Недоліком відомого монтажного возика ракети є його низькі експлуатаційні якості, такі як: - великі навантаження на напрямні штирі; - велика трудомісткість суміщення отворів і напрямних штирів, тому що привод повороту на основі сили тертя має невисоку точність. Найближчим до запропонованого по технічному рішенню є вибраний як прототип монтажний возик ракети, який описаний у авт.св. СРСР №721636, МПК F16M11/00, 1978р. Вказаний возик містить основу з ходовою частиною, на якій за допомогою вертикального гвинтового привода змонтована поперечна балка, раму, взаємодіючу з поперечною балкою за допомогою пружного еле со 4610 мента, а з ложементом за допомогою опорних роликів, і привід для повороту ложемента. Наявність пружного елемента (пружин) дозволяє значно зменшити навантаження на напрямні штирі. У якості вертикального привода для ступенів з великою вагою (до ЗОтс) може використовуватися гідроциліндр, на поршень якого спирається поперечна балка з ложементом і ступенем. Пдропривод забезпечує суміщення поздовжніх осей ступенів, які стикуються, у вертикальному напрямку. Процес стикування ступенів є тривалим, тому що необхідно встановити велику кількість болтів. Враховуючи, що герметичність гідроциліндра має певну величину, то поршень вертикального гідроциліндра під час навантаження буде опускатися. У результаті цього корпус ракети буде нерівномірно навантажуватися від різних візків і деформуватися. Недоліком відомого монтажного возика ракети є його невисокі експлуатаційні якості, такі як: - додаткове навантаження корпусу ракети після стикування ступенів від можливого опускання штоків вертикальних гідроциліндрів на монтажних візках; - можливість хитання поперечної балки зі ступенем у поперечній площині за рахунок пружин, що ускладнює процес суміщення отворів і напрямних штирів. В основу корисної моделі поставлена задача створення удосконаленої конструкції монтажного возика ракети, яка б дозволила забезпечити підвищення його експлуатаційних якостей шляхом уведення в нього нових елементів і технічних рішень, таких як: - наявність важільної системи, яка виконана у виді парної кількості пар шарнірних важелів, рівномірно розташованих по периметру поперечної балки і з'єднуючих поперечну балку з рамою, що дозволяє забезпечити рівномірне переміщення усієї поперечної балки у вертикальному напрямку; - один з важелів у кожній парі, розташованій на кінці поперечної балки, взаємодіє з регульованим упором, змонтованим на поперечній балці, що дозволяє виключити складання кожної пари важелів всередину і взаємодію останніх з пружним елементом; - привід виконується у виді тангенціальне розташованого гвинта, один кінець якого встановлений у втулці, шарнірно закріпленій за допомогою вилки на рамі, а другий його кінець взаємодіє з гайкою, шарнірно закріпленою за допомогою додаткової вилки на ложементі, що дозволяє забезпечити плавність регулювання кута повороту ложемента і його жорстку фіксацію у процесі стикування ступенів; - наявність двох вертикальних гвинтових упорів, які розташовані у поперечній площині возика, змонтовані на основі і штоки яких контактують з нижньою поверхнею поперечної балки, що дозволяє виключити опускання поршня гідроциліндра під час навантаження; - наявність скоби, яка шарнірно закріплена на поперечній балці за допомогою осі, паралельної поздовжній осі ложемента, і охоплює шток одного з гвинтових упорів, що дозволяє виключити несанкціонований поворот поперечної балки у горизон тальній площині разом з поршнем гідроциліндра і вихід поперечної балки із контакту з гвинтовими упорами. Поставлена задача вирішується таким чином, що у запропонованому монтажному возику ракети, який містить основу з ходовою частиною, на якій за допомогою вертикального гідроциліндра змонтована поперечна балка, раму, взаємодіючу з поперечною балкою за допомогою пружного елемента, а з ложементом за допомогою опорних роликів, і привод для повороту ложемента, він оснащений важільною системою, виконаною у виді парної кількості пар шарнірних важелів, рівномірно розташованих по периметру поперечної балки і з'єднуючих поперечну балку з рамою, при цьому один 3 важелів у кожній парі, розташованій на кінці поперечної балки, взаємодіє з регульованим упором, змонтованим на поперечній балці. Привід виконаний у вигляді тангенціально розташованого гвинта, один кінець якого встановлений у втулці, шарнірне закріпленій за допомогою вилки на рамі, а другий її кінець взаємодіє з гайкою, шарнірне закріпленою за допомогою додаткової вилки на ложементі. Возик оснащений двома вертикальними гвинтовими упорами, які розташовані у поперечній площині возика, змонтовані на основі і штоки яких контактують з нижньою поверхнею поперечної балки. Возик також оснащений скобою, яка шарнірне закріплена на поперечній балці за допомогою осі, паралельної поздовжній осі ложемента, і охоплює шток одного з гвинтових упорів. Для пояснення конструкції монтажного возика і його роботи додаються креслення та його детальний опис. На кресленнях зображено: - на Фіг.1 - загальний вид монтажного возика з пружним елементом; - на Фіг.2 - схема розміщення ступенів ракети на монтажних візках; - на Фіг.З - вид А Фіг.1 (вид монтажного возика збоку); - на Фіг.4 - виносний елемент В Фіг.2 (взаємне розташування напрямних штирів і отворів); - на Фіг.5 - виносний елемент Г Фіг.1 (схема важелів); - на Фіг.6 - вид Б Фіг.1 (загальний вид гвинтового привода); - на Фіг.7 - розріз Д-Д Фіг.6 (шарнірна вилка зі втулкою); - на Фіг.8 - розріз Е-Е Фіг.6 (додаткова шарнірна вилка з гайкою); - на Фіг.9 - загальний вид монтажного возика без пружного елемента; - на Фіг. 10 - розріз Ж-Ж Фіг.9 (розміщення гвинтових упорів). Запропонований монтажний возик складається з основи 1 з ходовою частиною 2, вертикального гідроциліндра 3, поперечної балки 4 з пружним елементом 5, виконаним у виді пружин, рами 6 з опорними роликами 7, ложемента 8 для ракети 9 і гвинтового привода 10 (Фіг.1, 3). Поперечна балка 4 зв'язана з рамою 6 за допомогою двох пар 11 важелів, розташованих по кінцях поперечної балки 4, і двох пар 12 важелів, розташованих у середній частині поперечної балки 4. Кожна пара 11 складається з двох шарнірнихважелів: верхнього 13 і нижнього 14, який взаємодіє з регульованим 4610 упором, закріпленим на поперечній балці 4 і виконаним у виді різьбової втулки 15 з гвинтом 16 (Фіг.5). Гвинтовий привод 10 складається з тангенціального гвинта 17, один кінець якого взаємодіє з двома поздовжніми упорами 18 і втулкою 19, шарнірне закріпленою на поперечній балці 4 за допомогою вилки 20 і осей 21, а другий його кінець взаємодіє з гайкою 22, шарнірне закріпленою на ложементі 8 за допомогою додаткової вилки 23, осей 24 і кронштейна 25 (Фіг.6-8). Ракета 9 складається з ступенів 26 і 27, стикування яких здійснюється на монтажних візках 28 і 29, встановлених на рейковому шляху ЗО (Фіг.2). Монтажні візки 28 виконані без пружного елемента 5 і без гвинтового привода 10, а монтажні візки 29 виконані з пружним елементом 5 і з гвинтовим приводом 10. На ступені 26 розташовані напрямні штирі 31, а в ступені 27 виконані відповідні отвори 32, при цьому поздовжня вісь напрямного штиря 31 розташовується вище (нижче) поздовжньої осі 32 на величину "с" (Фіг.4). На основі 1 змонтовані два вертикальних гвинтових упора, які складаються з маховиків 33, штоків 34 і скоби 35, закріпленої на поперечній балці 4 за допомогою поздовжньої осі 36 (Фіг.9, 10). На основі 1 змонтовані також привод поперечного переміщення ракети 9 і привод поздовжнього переміщення монтажного возика, які на кресленнях не зображені. Робота запропонованого монтажного возика ракети здійснюється наступним чином. Стикування ступенів 26 і 27 виконують у такій послідовності. Виконують суміщення поздовжніх осей напрямних штирів 31 і отворів 32 шляхом переміщення ступенів 26 і 27 у вертикальному і поперечному напрямках за допомогою приводів, а також шляхом їх повороту за допомогою гвинтових приводів 10. Кут повороту гвинтового привода складає ±3°. Потім ступінь 26 за допомогою приводів монтажних візків 28 і 29 переміщують у поздовжньому напрямку до входження напрямних штирів 31 у отвори 32. При цьому торець ступеня 26, як більш легшого, опускається (піднімається) на величину "с", стискаючи (ослаблюючи) пружини 5. У результаті цього на напрямні штирі 31 діє розрахункова сила стискання пружин 5. Наявність шарнірних важелів 11 і 12 виключає хитання попе речної балки 4 зі ступенем 26 або 27 у поперечній площині на пружинах 5 і забезпечує тільки вертикальне їх переміщення. Потім обертанням маховиків 33 піднімають штоки 34 гвинтових упорів до контакту з нижньою поверхнею поперечної балки 4 (на Фіг.9 підняте положення штоків 34 зображено пунктирною лінією). Далі ступені 26 і 27 з'єднують за допомогою болтів, при цьому гвинтові упори виключають опускання поршня вертикального гідроциліндра. Штоки 34 розташовані симетрично відносно вертикального гідроциліндра 3 і забезпечують рівномірне навантаження поперечної балки 4. Для керування кожним гідроприводом (вертикальним і поперечним) на основі 1 шарнірно закріплено по одному вертикальному важелю. Потім, якщо необхідно, обертанням маховиків 33 опускають штоки 34, а ложемент 8 опускають за допомогою вертикального гідроциліндра 3. Наявність скоби 35 виключає поворот поперечної балки 4 у горизонтальній площині на усіх етапах експлуатації монтажного возика як з ракетою 9, так і без неї. При цьому скоба 35 забезпечує вільне переміщення у вертикальному напрямку як поперечної балки 4, так і штока 34, який охоплений. Виведення скоби 35 із зачеплення зі штоком 34, який охоплений, здійснюють поворотом скоби 35 за стрілкою годинника відносно осі 36, паралельної поздовжній осі ложемента 8 (Фіг. 10). Запропонований монтажний возик може використовуватися для складання ракет у різних умовах: - у наземному монтажно-випробувальному корпусі за патентом України №56926А, МПК B64G5/00, Е04Н5/02, 2002р.; - на кораблі стеження плавучого ракетного комплексу за патентом України №52453А, МПК B64G5/00, В63В1/00, 2002р.; - на плавучому транспортному засобі за патентом України №39150, МПК B64G5/00, F41F3/042, 1996р. Таким чином, запропонований монтажний возик ракети, який має просту і надійну конструкцію, дозволяє забезпечити складання моноблочних ракет з мінімальним навантаженням ступенів ракети і високою безпекою робіт. 28/ 29/ \_Є_ Фіг.2 \ 29 28, 4610 Фіг. 4 Фіг. 5 д -л Фіг. 8 Фіг. 10 Комп'ютерна верстка Д. Шеверун Підписне Тираж 37 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул Урицького, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул. Глазунова, 1, м. Київ - 4 2 , 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAssembly cart of rocket
Автори англійськоюMokin Andrii Oleksandrovych, Mokin Oleksandr Vasyliovych
Назва патенту російськоюМонтажная тележка ракеты
Автори російськоюМокин Андрей Александрович, Мокин Александр Васильевич
МПК / Мітки
Мітки: ракети, возик, монтажний
Код посилання
<a href="https://ua.patents.su/4-4610-montazhnijj-vozik-raketi.html" target="_blank" rel="follow" title="База патентів України">Монтажний возик ракети</a>
Монтажний возик ракети

Номер патенту: 56930
Опубліковано: 15.05.2003
Автори: Дулов Володимир Іхієлійович, Косульніков Олег Михайлович, Мокін Олександр Васильович, Личагіна Тетяна Федорівна, Мокін Андрій Олександрович, Павлиш Іван Федорович
Мітки: монтажний, ракети, возик
Формула / Реферат:
1. Монтажний возик ракети, що містить основу з ходовою частиною, ложемент і пристрій для сушіння повітря, патрубок якого для виведення повітря з'єднаний за допомогою гнучкого трубопроводу з дренажною горловиною паливного бака ракети, який відрізняється тим, що він оснащений розташованою у поперечній площині Z-подібною рамою з нижньою й верхньою поличками і Г-подібним кронштейном, при цьому нижня поличка Z-подібної рами жорстко закріплена на...
Возик з велосипедом
Номер патенту: 63046
Опубліковано: 15.01.2004
Автори: Пащенко Валерій Владиславович, Пащенко Владислав Петрович
МПК: B62K 27/00
Мітки: возик, велосипедом
Формула / Реферат:
1. Возик з велосипедом, що має корпус, колеса, кліщові гальма, з'єднувальний пристрій возика з рамою велосипеда, сидіння для водія, який відрізняється тим, що з'єднувальний пристрій розміщено між рамою велосипеда і корпусом у вигляді рознесених по висоті двох кріплень, що мають пластини, прикріплені до верхньої і нижньої задніх трубок корпуса возика, з'єднані гвинтами таким чином: верхня з пластиною, прикріпленою до труби рами велосипеда...
Монтажно-випробувальний корпус ракети
Номер патенту: 56926
Опубліковано: 15.05.2003
Автори: Мокін Олександр Васильович, Мокін Андрій Олександрович, Фаєрович Іосиф Моісейович, Потапенко Ігор Анатолійович, Зуєв Володимир Володимирович, Царьова Валентина Іванівна
Мітки: ракети, корпус, монтажно-випробувальний
Формула / Реферат:
1. Монтажно-випробувальний корпус ракети, що містить підлогу, стіни з покрівлею, контрольно-перевірочну апаратуру, яка з'єднана кабелями з наземною платою електричних рознімів, залізничну колію з рейками для монтажних візків ракети, яка має бортову плату електричних рознімів, і привід поздовжнього переміщення, який розташований у заглибині підлоги і взаємодіє з кронштейном одного з монтажних візків, який відрізняється тим, що він оснащений...
Монтажно-випробувальний корпус ракети
Номер патенту: 47977
Опубліковано: 15.07.2002
Автори: Марченко Оксана Віталійовна, Бірюков Генадій Павлович, Литвин Микола Гаврилович, Мокін Олександр Васильович, Кушнарьов Олександр Павлович, Мокін Андрій Олександрович
Мітки: ракети, монтажно-випробувальний, корпус
Формула / Реферат:
1. Монтажно-випробувальний корпус ракети, що містить ділянку підготовки ракетних блоків і ділянку складання ракети, що складаються з підлоги, поздовжніх і поперечних стін із покрівлею, залізничної колії для монтажних візків ракетних блоків та плат електричних і пневматичних роз'ємів, який відрізняється тим, що він оснащений ділянкою ховання ракетних блоків, яка примикає до однієї з поздовжніх стін ділянки підготовки і розділена поздовжніми...
Монтажно-випробувальний корпус ракети
Номер патенту: 56936
Опубліковано: 15.05.2003
Автори: Мокін Олександр Васильович, Мокін Андрій Олександрович, Тур Сергій Віталійович, Ігдалов Іосиф Менделевич, Шарапов Валерій Сергійович, Дмитрієв Борис Вікторович
Мітки: ракети, монтажно-випробувальний, корпус
Формула / Реферат:
1. Монтажно-випробувальний корпус ракети, що містить підлогу, стіни з покрівлею, ворота і залізничну колію для монтажного возика ракетного блока, який відрізняється тим, що він оснащений додатковою залізничною колією, яка розташована у прорізі воріт на висоті, яка перевищує довжину першого ступеня ракети, і складальним возиком з приводом поздовжнього переміщення, який встановлений на додатковій залізничній колії, при цьому зовнішня частина...
Попередній патент: Спосіб отримання інокулюма для створення інфекційного фону збудника церкоспорозу – гриба cercospora beticola
Наступний патент: Високошвидкісна широкосмугова система радіозв’язку
Випадковий патент: Сполуки для лікування розладів метаболізму