Спосіб та пристрій для вимірювання перевищень
Номер патенту: 46413
Опубліковано: 25.12.2009
Автори: Бурачек Всеволод Германович, Нисторяк Іван Олександрович, Параніч Віктор Петрович, Малік Тетяна Миколаївна

Формула / Реферат
Спосіб вимірювання перевищень, що заснований на методі геометричного нівелювання при використанні автоматизованого нівеліра з багатоелементним матричним фотоприймачем та двох рейок з нанесеними на їх поверхню шкалами, який відрізняється тим, що відліки на рейках виконують за V-подібними індексами на рейках з горизонтальною орієнтацією бісектриси V-подібного індексу, рядки мішені орієнтують багатоелементним матричним фотоприймачем по напрямку вимірювань перпендикулярно до бісектриси V-подібного зображення індексу, підсумовують відліки по рядках мішені фотоприймача в зонах як мінімум переднього і заднього фронтів зображення фігур контрастних V-подібних індексів і обчислюють координату вершини фігури зображення індексу за формулою:
![]()
де
і - номер пікселя в рядку;
аіП - номер пікселя перед лінією переднього фронту фігури;
аі3 - номер пікселя перед лінією заднього фронту фігури;
h - висота зображення в пікселях;
t - номер рядка початку відліку пікселів,
при цьому контролюють нахил фігури від площини, утвореної напрямком стовпців мішені фотоприймача і лінії візування на ціль, який визначається по асиметрії зміни відліків для переднього і заднього фронтів за напрямком стовпців мішені фотоприймача.
Текст
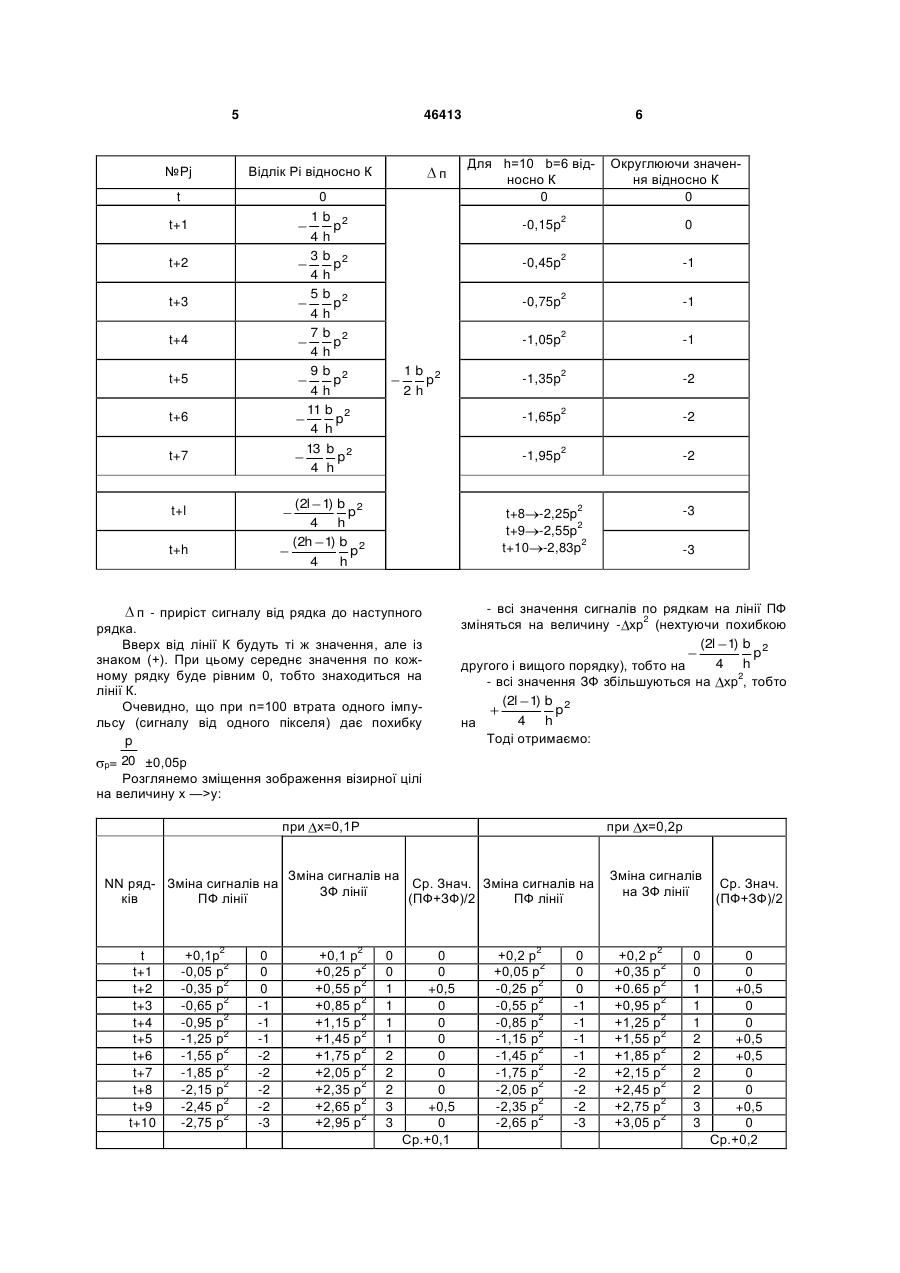
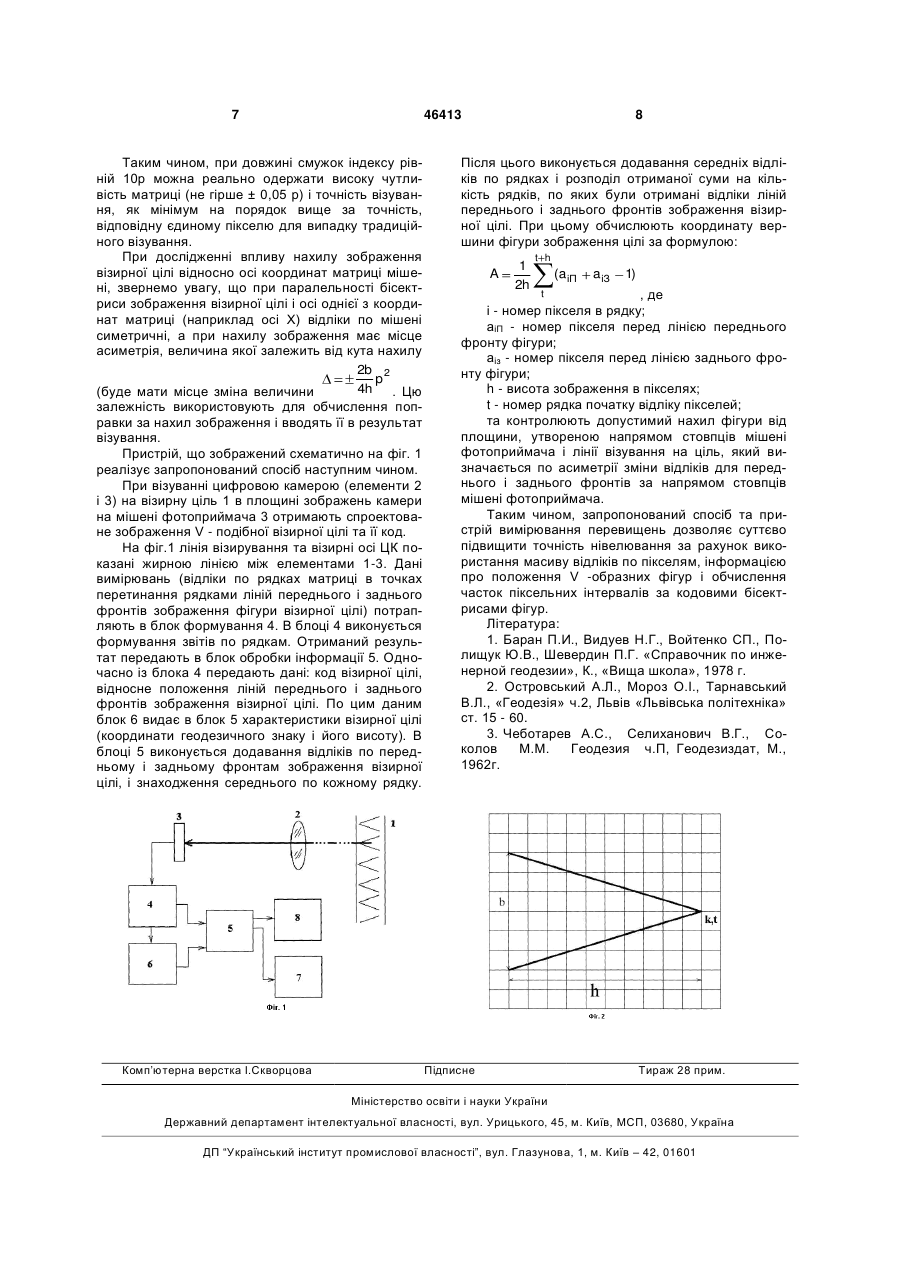
Спосіб вимірювання перевищень, що заснований на методі геометричного нівелювання при використанні автоматизованого нівеліра з багатоелементним матричним фотоприймачем та двох рейок з нанесеними на їх поверхню шкалами, який відрізняється тим, що відліки на рейках виконують за V-подібними індексами на рейках з горизонтальною орієнтацією бісектриси V-подібного індексу, рядки мішені орієнтують багатоелементним матричним фотоприймачем по напрямку вимірювань перпендикулярно до бісектриси V-подібного зображення індексу, підсумовують відліки по рядках мішені фотоприймача в зонах як мінімум пе реднього і заднього фронтів зображення фігур контрастних V-подібних індексів і обчислюють координату вершини фігури зображення індексу за формулою: Корисна модель належить до галузі геодезії, зокрема до методів вимірювань за допомогою цифрових оптико - електронних приладів. Відомий спосіб геометричного нівелювання по нівелірних рейках [1]. Автоматизація відліків по рейках, в теперішній час за несприятливих погодних умов вирішується за допомогою важливих конструктивних вдосконалень нівелірів та рейок, а саме: вмонтуванню в нівеліри цифрових камер з ПЗЗ (прилад зарядного зв'язку) - сенсорами [2]. У таких камерах в площині знімка встановлене плоске двомірне поле світлочутливих детекторів - сенсорів, які дають елементи зображення предмета. При реалізації даного методу відрізок на рейці який попадає на поле детекторів незначний - близько 15 см вверх і вниз від середньої горизонтальної нитки сітки зорової труби. Детектори подають сигнали, які зчитуються і потім перетворюються в цифрові за допомогою комп'ютера. Таким чином, певна частина нівелірної рейки розглядається фотоприймачем ПЗЗ та аналізуєть ся комп'ютером. Традиційні рейки замінюються кодовими рейками: з чорними і білими горизонтальними смугами. На одному боці рейки нанесені поділки у вигляді чорних та білих смужок, що створюють двійкович код. На другому боці нанесені поділки, які служать для візуального відліку [2]. Відомі такі способи візування при нівелюванні, наприклад: - візуальний, за допомогою оптичної зорової труби [3], при цьому використовують методи візування зоровою трубою нівеліра, теодоліта та ін., де для візування застосовують сітки і шкали з вертикальними і горизонтальними нитками; - метод, в якому виконують візування мішенню фотоприймального пристрою по горизонтальному або вертикальному штриху, а також по зображенню точки [1]. До недоліків вищевказаних автоматизованих способів і засобів нівелювання слід віднести візування на рейку і зняття відліків по зображенням горизонтальних штрихів, що, враховуючи дискрет 1 th (aiП aiЗ 1), 2h t (19) UA (11) 46413 (13) де і - номер пікселя в рядку; аіП - номер пікселя перед лінією переднього фронту фігури; аі3 - номер пікселя перед лінією заднього фронту фігури; h - висота зображення в пікселях; t - номер рядка початку відліку пікселів, при цьому контролюють нахил фігури від площини, утвореної напрямком стовпців мішені фотоприймача і лінії візування на ціль, який визначається по асиметрії зміни відліків для переднього і заднього фронтів за напрямком стовпців мішені фотоприймача. U A 3 46413 ність ПЗЗ - сенсора не дає можливості отримати високу точність відліку. Як аналог, прийнятий за прототип, може бути спосіб і пристрій для нівелювання за допомогою нівеліра з ПЗЗ - сенсорами та рейок з кодовим нанесенням чорних та білих горизонтальних смужок [2]. Задачею винаходу являється створення способу та пристрою вимірювання перевищень з підвищеною точністю автоматизованого відліку по нівелірній рейці. Поставлена задача вирішується за допомогою створення способу вимірювання перевищень, заснованого на методі геометричного нівелювання при використанні автоматизованого нівеліра з багатоелементним матричним фотоприймачем та двох рейок з нанесеними на їх поверхню шкалами, який відрізняється тим, що відліки по рейках виконують по V-подібних індексах на рейках з горизонтальною орієнтацією бісектриси V-подібного індексу, при цьому сумують відліки по рядках мішені фотоприймача, в зонах як мінімум переднього і заднього фронтів зображення фігур контрастних V-подібних індексів, а рядки мішені орієнтують по напряму вимірювань перпендикулярно до бісектриси V-подібного зображення індексу, і обчислюють координату вершини фігури зображення індексу за формулою : A 1 2h t h (a iП a iЗ 1), де t i - номер пікселя в рядку; аiП - номер пікселя перед лінією переднього фронту фігури; аі3 - номер пікселя перед лінією заднього фронту фігури; h - висота зображення в пікселях; t - номер рядка початку відліку пікселей; Дві найближчі до нульового відліку бісектриси обчислюють шляхом інтерполювання точного відліку по рейці, а також за співвідношенням відстаней між бісектрисами зображень V-подібних індексів в полі зору нівеліра визначають значення грубих відліків по рейкам. Запропонований спосіб реалізовується за допомогою пристрою, блок-схема якого зображена на фіг.1 1 - шкала нівелірної рейки з V-подібними індексами; 2 - об'єктив цифрової камери нівеліра; 3 - матричний фотоприймач; 4 4 - блок формування; 5 - блок обробки інформації; 6 - блок пам'яті; 7 - блок запису та зберігання інформації; 8 - блок індикації ; На фіг.2 схематично зображено розміщення зображення V - подібного індекса з контрастних смуг на вимірювальній мішені, наприклад на ПЗЗматриці. Домовимося рахування пікселів виконувати зверху вниз (i=l,k,n) та зверху вниз (i=l,t,m), при цьому: k, t - координати вершини V - подібної фігури; h - висота трикутника фігури; b - основа (базис) фігури; k-1/2b, t+h - координати точок верхнього кінця базиса; k+1/2b, t+h - координати точок нижнього кінця базиса; 1 Лінія, що сполучає крапки (k,t) з (к- 2 b,t + h),e 1 2 b,t + h) переднім фронтом (ПФ) фігури і з (k + заднім фронтом (ЗФ). Лінія фронту - це контрастна лінія переходу межі фігури (наприклад, на чорному фоні світлий колір фігури, або на світлому фоні чорний колір). Розпізнавання фігури можна проводити по куту між лініями ПФ і ЗФ, а також по відношенню розмірів h і b. Крім того, поряд з фігурою можна розмістити код візирної цілі. Нахил лінії ПФ (ЗФ) буде рівний tg a 2 b 2h ПФ tg a 2 b 2h ЗФ (1) Розглянемо варіант чутливості матриці, при якому пікселі ініціюють електричний сигнал у разі засвічування не менше 0,5 площі пікселя. b 2 h =0,3 Необхідно врахувати відношення і округлення номера пікселя за заданої умови ( на чорному фоні світлий колір фігури). Якщо горизонтальна лінія К на рис. 1 ділить фігуру навпіл, то: 5 №Pj 46413 Відлік Pi відносно К t п 0 1b 2 p 4h 3b 2 p 4h 5b 2 p 4h 7b 2 p 4h 9b 2 p 4h 11 b 2 p 4 h 13 b 2 p 4 h t+1 t+2 t+3 t+4 t+5 t+6 t+7 t+h Для h=10 b=6 відносно К 0 2 0 -0,45p2 -1 2 -1 2 -1 -1,35p 2 -2 -1,65p2 -2 -1,95p2 -2 t+8 -2,25p2 t+9 -2,55p2 2 t+10 -2,83p -3 -0,75p -1,05p 1b 2 p 2h п - приріст сигналу від рядка до наступного рядка. Вверх від лінії К будуть ті ж значення, але із знаком (+). При цьому середнє значення по кожному рядку буде рівним 0, тобто знаходиться на лінії К. Очевидно, що при n=100 втрата одного імпульсу (сигналу від одного пікселя) дає похибку p = 20 ±0,05p р Розглянемо зміщення зображення візирної цілі на величину х —>у: t t+1 t+2 t+3 t+4 t+5 t+6 t+7 t+8 t+9 t+10 +0,1р2 2 -0,05 р -0,35 р2 -0,65 р2 2 -0,95 р 2 -1,25 р -1,55 р2 2 -1,85 р -2,15 р2 -2,45 р2 2 -2,75 р 0 0 0 -1 -1 -1 -2 -2 -2 -2 -3 при х=0,2р Зміна сигналів на Ср. Знач. Зміна сигналів на ЗФ лінії (ПФ+ЗФ)/2 ПФ лінії +0,1 р2 2 +0,25 р +0,55 р2 +0,85 р2 2 +1,15 р 2 +1,45 р +1,75 р2 2 +2,05 р +2,35 р2 +2,65 р2 2 +2,95 р -3 - всі значення сигналів по рядкам на лінії ПФ зміняться на величину - хр2 (нехтуючи похибкою (2l 1) b 2 p 4 h другого і вищого порядку), тобто на - всі значення ЗФ збільшуються на хр2, тобто (2l 1) b 2 p 4 h на Тоді отримаємо: при х=0,1Р NN ряд- Зміна сигналів на ків ПФ лінії Округлюючи значення відносно К 0 -0,15p (2l 1) b 2 p 4 h (2h 1) b 2 p 4 h t+l 6 0 0 1 1 1 1 2 2 2 3 3 0 0 +0,5 0 0 0 0 0 0 +0,5 0 Ср.+0,1 +0,2 р2 2 +0,05 р 2 -0,25 р -0,55 р2 2 -0,85 р 2 -1,15 р -1,45 р2 2 -1,75 р -2,05 р2 -2,35 р2 2 -2,65 р 0 0 0 -1 -1 -1 -1 -2 -2 -2 -3 Зміна сигналів на ЗФ лінії +0,2 р2 2 +0,35 р +0.65 р2 +0,95 р2 2 +1,25 р 2 +1,55 р +1,85 р2 2 +2,15 р +2,45 р2 +2,75 р2 2 +3,05 р 0 0 1 1 1 2 2 2 2 3 3 Ср. Знач. (ПФ+ЗФ)/2 0 0 +0,5 0 0 +0,5 +0,5 0 0 +0,5 0 Ср.+0,2 7 46413 Таким чином, при довжині смужок індексу рівній 10р можна реально одержати високу чутливість матриці (не гірше ± 0,05 р) і точність візування, як мінімум на порядок вище за точність, відповідну єдиному пікселю для випадку традиційного візування. При дослідженні впливу нахилу зображення візирної цілі відносно осі координат матриці мішені, звернемо увагу, що при паралельності бісектриси зображення візирної цілі і осі однієї з координат матриці (наприклад осі X) відліки по мішені симетричні, а при нахилу зображення має місце асиметрія, величина якої залежить від кута нахилу 2b 2 p 4h . Цю (буде мати місце зміна величини залежність використовують для обчислення поправки за нахил зображення і вводять її в результат візування. Пристрій, що зображений схематично на фіг. 1 реалізує запропонований спосіб наступним чином. При візуванні цифровою камерою (елементи 2 і 3) на візирну ціль 1 в площині зображень камери на мішені фотоприймача 3 отримають спроектоване зображення V - подібної візирної цілі та її код. На фіг.1 лінія візирування та візирні осі ЦК показані жирною лінією між елементами 1-3. Дані вимірювань (відліки по рядках матриці в точках перетинання рядками ліній переднього і заднього фронтів зображення фігури візирної цілі) потрапляють в блок формування 4. В блоці 4 виконується формування звітів по рядкам. Отриманий результат передають в блок обробки інформації 5. Одночасно із блока 4 передають дані: код візирної цілі, відносне положення ліній переднього і заднього фронтів зображення візирної цілі. По цим даним блок 6 видає в блок 5 характеристики візирної цілі (координати геодезичного знаку і його висоту). В блоці 5 виконується додавання відліків по передньому і задньому фронтам зображення візирної цілі, і знаходження середнього по кожному рядку. Комп’ютерна верстка І.Скворцова 8 Після цього виконується додавання середніх відліків по рядках і розподіл отриманої суми на кількість рядків, по яких були отримані відліки ліній переднього і заднього фронтів зображення візирної цілі. При цьому обчислюють координату вершини фігури зображення цілі за формулою: A 1 2h t h (a іП a іЗ 1) , де і - номер пікселя в рядку; аіП - номер пікселя перед лінією переднього фронту фігури; аіз - номер пікселя перед лінією заднього фронту фігури; h - висота зображення в пікселях; t - номер рядка початку відліку пікселей; та контролюють допустимий нахил фігури від площини, утвореною напрямом стовпців мішені фотоприймача і лінії візування на ціль, який визначається по асиметрії зміни відліків для переднього і заднього фронтів за напрямом стовпців мішені фотоприймача. Таким чином, запропонований спосіб та пристрій вимірювання перевищень дозволяє суттєво підвищити точність нівелювання за рахунок використання масиву відліків по пікселям, інформацією про положення V -образних фігур і обчислення часток піксельних інтервалів за кодовими бісектрисами фігур. Література: 1. Баран П.И., Видуев Н.Г., Войтенко СП., Полищук Ю.В., Шевердин П.Г. «Справочник по инженерной геодезии», К., «Вища школа», 1978 г. 2. Островський А.Л., Мороз О.І., Тарнавський В.Л., «Геодезія» ч.2, Львів «Львівська політехніка» ст. 15 - 60. 3. Чеботарев А.С., Селиханович В.Г., Соколов М.М. Геодезия ч.П, Геодезиздат, М., 1962г. t Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП ―Український інститут промислової власності‖, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for measurement of excess
Автори англійськоюBurachek Vsevolod Hermanovych, Paranich Viktor Petrovych, Nystoriak Ivan Oleksandrovych, Malik Tetiana Mykolaivna
Назва патенту російськоюСпособ и устройство для измерения превышений
Автори російськоюБурачек Всеволод Германович, Паранич Виктор Петрович, Нисторяк Иван Александрович, Малик Татьяна Николаевна
МПК / Мітки
МПК: G01C 5/00
Мітки: спосіб, пристрій, вимірювання, перевищень
Код посилання
<a href="https://ua.patents.su/4-46413-sposib-ta-pristrijj-dlya-vimiryuvannya-perevishhen.html" target="_blank" rel="follow" title="База патентів України">Спосіб та пристрій для вимірювання перевищень</a>
Спосіб візування цифровою камерою

Номер патенту: 32103
Опубліковано: 12.05.2008
Автори: Бурачек Всеволод Германович, Мамонтова Людмила Степанівна, Нисторяк Іван Олександрович
МПК: G01C 11/00
Мітки: камерою, візування, цифровою, спосіб
Формула / Реферат:
Спосіб візування цифровою камерою, що оснований на визначенні координати V-подібного зображення візирної цілі у полі зору цифрової камери, який відрізняється тим, що при вимірюванні місцеположення зображення візирної цілі на мішені матричного фотоприймача цифрової камери підсумовують відліки по рядках мішені фотоприймача в зонах, як мінімум, переднього і заднього фронтів зображення фігури цілі, а рядки мішені орієнтують за напрямом...
Пристрій визначення положення промірної вертикалі з судна
Номер патенту: 34681
Опубліковано: 26.08.2008
Автори: Мамонтова Людмила Степанівна, Нисторяк Іван Олександрович, Бурачек Всеволод Германович
МПК: G01C 11/00
Мітки: положення, пристрій, вертикалі, визначення, судна, промірної
Формула / Реферат:
Пристрій визначення положення промірної вертикалі з судна при реалізації оберненої геодезичної засічки, який містить цифрову камеру, що встановлена на поворотній платформі з гіростабілізатором, електронні блоки обробки, запису та зберігання інформації, блок керування, берегові орієнтирні знаки, який відрізняється тим, що берегові орієнтирні знаки виконані у вигляді контрастних V-подібних фігур з гострим кутом при вершині, що нанесені на...
Спосіб візування зоровими трубами геодезичних приладів
Номер патенту: 86562
Опубліковано: 27.04.2009
Автори: Літинський Святослав Володимирович, Літинський Володимир Осипович, Шевченко Тарас Георгієвич
МПК: G01C 5/00
Мітки: візування, трубами, спосіб, зоровими, геодезичних, приладів
Формула / Реферат:
Спосіб візування зоровими трубами геодезичних приладів, який полягає у тому, що наводять зорову трубу геодезичного приладу на ціль, суміщають з візирною ціллю відповідний штрих сітки ниток і відлічують кутомірні кола чи рейку, який відрізняється тим, що за окуляром зорової труби на її оптичній осі додатково встановлюють цифровий носій інформації, наприклад цифрову відеокамеру, за умови розташування її об'єктива у задній фокусній площині...
Спосіб визначення кутових координат цілі і пристрій для його реалізації
Номер патенту: 74230
Опубліковано: 15.11.2005
Автори: Черняк Сергій Іванович, Бузанов Віктор Іванович, Попов Віктор Гаврилович
МПК: F41G 3/22
Мітки: реалізації, пристрій, цілі, спосіб, визначення, координат, кутових
Формула / Реферат:
1. Спосіб визначення кутових координат цілі за допомогою нашоломної системи цілеуказання з нерухомою міткою у візирному пристрої, який включає фіксацію положення візирної лінії шляхом суміщення нерухомої мітки з ціллю та визначення кутових координат візирної лінії, що відповідають кутовим координатам цілі, який відрізняється тим, що за допомогою додаткової рухомої мітки фіксують кут непогодження між положенням візирної лінії, що визначається...
Пристрій для вимірювання кутів у геодезичних приладах
Номер патенту: 30130
Опубліковано: 15.11.2000
Автори: Голік Марат Миколайович, Пасько Ігор Матвійович, Гринюк Ігор Євгенович
МПК: G01C 1/00
Мітки: вимірювання, приладах, пристрій, кутів, геодезичних
Формула / Реферат:
Пристрій для вимірювання кутів у геодезичних приладах, що містить оптично зв'язаний лімб, шкалу, інтервал між штрихами якої відповідає цілому числу кутових хвилин повороту лімбу, мікроскоп, блок передачі на шкалу зображення штрихів лімбу зі збільшенням, яке дає можливість розміщення між зображенням двох штрихів лімбу цілого числа інтервалів між штрихами шкали, який відрізняється тим, що на частині кожного інтервалу між штрихами лімбу нанесено...
Попередній патент: Нетканий в’язаний матеріал
Наступний патент: Інтелектуальна система тренажерного навчання геодезичним вимірам
Випадковий патент: Запірний пристрій